Результат интеллектуальной деятельности: Головная часть космической ракеты-носителя и способ выведения космических аппаратов
Вид РИД
Изобретение
Предлагаемое изобретение относится к области ракетно-космической техники и может быть использовано при проектно-конструкторской разработке высотных ступеней, предназначенных для выведения космических аппаратов (КА) на околоземные орбиты.
В патенте «Ракета космического назначения RU 2025645 c1, 1994 г.» представлено описание конструкции высотной ступени, а в известной публикации: НТЦ «Комплекс-МИТ», Ю.С. Соломонов, А.П. Сухадольский и др. «Космические ракетные комплексы с твердотопливными ракетами «Старт» и «Старт-1», Москва, Универсум, 2000 г, представлено описание схемы выведения (КА) на околоземные орбиты космической ракетой-носителем (КРН).
КРН представляет собой четырехступенчатую твердотопливную ракету, способную осуществить выведение малогабаритных КА на околоземные орбиты.
Для удобства изложения материала высотную ступень с КА будем называть головной частью (ГЧ) КРН (что соответствует первоначальному названию).
Главной конструктивной особенностью КРН является наличие на ней ГЧ, содержащей головной блок с КА и ступенью выведения. ГЧ КРН, содержащая головной блок с КА и ступень выведения, принята авторами за прототип.
Была предложена ГЧ космической ракеты-носителя (РН), содержащая отсек с двигательной установкой (ДУ), соединенной с обтекателем, внутри которого на платформе посредством адаптера установлена полезная нагрузка, а во внутренней полости платформы подвешен герметичный приборный отсек с системой управления РН и аппаратурой системы измерения РН.
Способ выведения осуществляется следующим образом. После окончания основного участка работы ДУ последней ступени КРН задействуется ДУ ступени выведения, работающая с постоянной тягой до полного выгорания топлива, после чего включается газореактивная система ориентации, установленная в районе сопла ДУ последней ступени. После завершения ориентации последней ступени КА отделяется и продолжает полет по заданной орбите.
Как показал анализ материалов прототипа, ГЧ КРН имеет некоторые недостатки, связанные с конструктивно-компоновочной схемой:
1. В связи с ограниченными энергетическими возможностями ДУ ДС (масса топлива ДУ ГЧ составляет примерно 4…5% от общей массы ГЧ КРН) после окончания работы ДУ последней ступени КРН на участке работы ДУ ГЧ приращение скорости незначительно (1…1,5%), что не позволяет варьировать параметры орбиты (высоту, наклонение и др.). Это положение сохраняется для случая, когда предстоит запустить не один, а несколько малогабаритных КА, т.к. каждый из них будет иметь одну и ту же конечную скорость;
и схемой функционирования прототипа в полете:
1. В случае если КА относится к типу спутников, исследующих земную поверхность, то один КА сможет обеспечить ограниченную зону наблюдения земной поверхности;
2. Для того, чтобы запустить на орбиту несколько разнотипных КА, т.е. имеющие различные целевые назначения, при заданной массе им высоте запуска, потребуется соответствующее количество КРН, что приведет к увеличению финансовых затрат.
Задачей изобретения является обеспечение возможности запуска нескольких однотипных или разнотипных КА с помощью одной ракеты-носителя на собственные орбиты. В нем решаются также технические задачи по созданию более рациональной компоновки ГЧ КРН, повышению ее энергетических возможностей, позволяющих улучшить параметры орбиты (высоту, наклонение и др.), увеличить площадь наблюдения земной поверхности.
Решение поставленной задачи достигается тем, что известная головная часть космической ракеты-носителя (РН), содержащая отсек с двигательной установкой, соединенной с обтекателем, внутри которого на платформе посредством адаптера установлена полезная нагрузка, а во внутренней полости платформы подвешен герметичный приборный отсек с системой управления ракеты-носителя и аппаратурой системы измерения ракеты-носителя, отличается тем, что полезная нагрузка содержит два и более универсальных модуля с собственными двигательными установками (ДУ) с четырьмя «толкающими» и четырьмя радиально расположенными управляющими соплами с рулевыми приводами, с системой управления, электрически связанной с бортовой аппаратурой спутниковой навигации (БАСН), антенны которой установлены по базам I и III и системой измерения и контроля, кроме того, ракета-носитель снабжена собственным БАСН, кроме того, универсальные модули закреплены на центральном основании с помощью пирозамковых устройств.
Устройство поясняется чертежами:
- Фиг. 1 - общий вид ступени выведения КА,
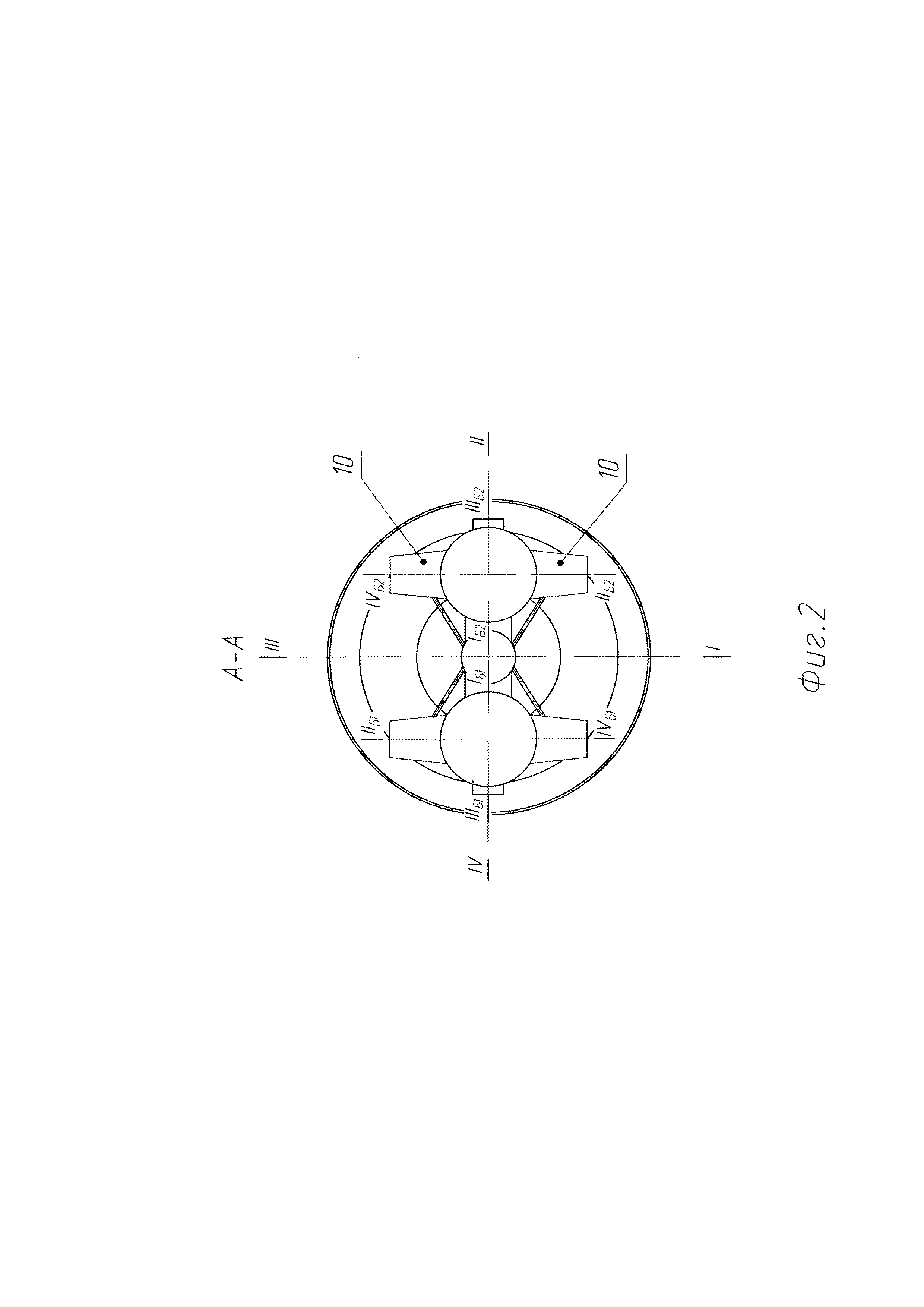
- Фиг. 2, 3 - фрагменты компоновки ступени,
- Фиг. 4 - схема разведения 2-х КА, выводимых одной РН.
Головная часть содержит обтекатель (1), два или три КА (2), каждый из которых снабжен универсальным модулем, состоящим из последовательно расположенных адаптера (3), герметичного приборного отсека (ГПО) с бесплатформенной системой управления (СУ) (4), электрически связанной с бортовой аппаратурой спутниковой навигации (БАСН) (5), отсека (6) с ДУ глубокого регулирования (7), снабженной четырьмя управляющими «толкающими» соплами (8) и четырьмя радиальными соплами (9) и рулевым приводом, аппаратуры системы измерений (СИ), расположенной на внешней поверхности отсека АО (10), КА с универсальными модулями, установленным на центральном основании (11) с помощью пирозамков (12), хвостовая часть (13) которого крепится к отсеку РН, на этой хвостовой части установлена БАСН РН (14)
Данное устройство реализует заявленный способ выведения КА за счет того, что в известном способе, при котором при достижении спада давления в ДУ последней ступени ракеты-носителя (РН) до уровня, близкого к нулю, задействуют ДУ модуля, в процессе работы которой система управления модуля определяет потребное время работы ДУ, обеспечивают приращение кажущейся скорости до первой космической, при достижении спада давления в ДУ до уровня, близкого к нулю, задействуют газореактивную систему ориентации (ГРСО), с помощью которой достигают заданной ориентации КА к моменту его отделения, отделяют КА от последней ступени РН, отличающимся тем, что, при достижении спада давления в ДУ последней ступени РН до уровня, равного 1…2 кг/см2 отстыковывают универсальные модули с КА, включают ДУ этих модулей, обеспечивают набор дополнительной скорости каждого модуля с КА примерно 3,5…4 процента по отношению к первоначальной скорости, при необходимости корректируют угол отклонения вектора тяги модуля и обеспечивают полет так, что модуль КА-1 продолжает полет в плоскости орбиты (15), модуль КА-2 в плоскости орбиты (16), находящихся к базовой плоскости орбиты (17) под углами dFi и -dFi соответственно, при этом точками пересечения указанных плоскостей орбит с плоскостью экватора (18) являются точки (19) и (20) соответственно. Угол dFi определяется по формуле:
за 20…30 секунд до момента отделения КА переключают ДУ модуля на пониженный режим тяги, величина которой снижается в 10…15 раз по сравнению с номинальным значением, прекращают работу «толкающих» управляющих сопел, задействуют радиально расположенные управляющие сопла, обеспечивают управление угловым положением модуля с КА, придают заданную ориентацию КА к моменту его отделения, обеспечивают нулевую тягу ДУ модуля, отделяют КА от модуля, где:
dVДУ - запас характеристической скорости ДУ одного модуля с КА (определяется по формуле Циолковского);
V1 - скорость движения КА по базовой орбите.
Анализ показывает, что величина такого угла составляет 2…2,5 градусов. Если в состав ступени выведения входят два модуля с КА, то суммарный угол между плоскостями орбит за счет маневра в противоположных направлениях составит 4…5 градусов. На поверхности Земли наибольшее расстояние, при этом, составит 470…500 км. Таким образом, можно существенно увеличить площадь обзора (обслуживания) земной поверхности по сравнению с одиночным КА, при запуске одной и той же РН.
Таким образом, предлагаемое изобретение, в котором ГЧ содержит два и более универсальных модуля с собственными двигательными установками с четырьмя «толкающими» и четырьмя радиально расположенными управляющими соплами с рулевыми приводами с системой управления, электрически связанной с бортовой аппаратурой спутниковой навигации, с системой измерения и контроля, при этом РН снабжена собственной БАСН, позволяет решить поставленную задачу, как в части конструкции, так и в части способа и является дальнейшим развитием возможностей существующих КРН, позволяющих с использованием одной ракеты-носителя произвести запуск нескольких малогабаритных КА на собственные околоземные орбиты, что приводит к существенному сокращению финансовых затрат.

Отсечной клапан
Устройство для замера давления
Клапан для регулирования расхода горячего газа
Регулятор расхода газа
Способ экспериментального определения параметров запуска двигателя при стендовых испытаниях
Герметизирующее устройство газового тракта
Устройство для фиксации отделяемых в процессе эксплуатации частей изделия от корпуса
Устройство для фиксации отделяемых в процессе эксплуатации частей изделия от корпуса
Отсечной клапан
Ракетный двигатель твердого топлива для увода отделяемых частей
Клапан для регулирования горячего газа
Гибкое соединение газоводов с общей осью
Способ прочностных испытаний кинематической цепи привод - регулирующий элемент сопловых регулируемых блоков и сопловой регулируемый блок для его осуществления
Газораспределительный клапан
Модуль подводной станции для эвакуации на поверхность воды
Установка для опреснения соленой воды и способ опреснения соленой воды с использованием установки
Узел соединения раструба сопла
Регулятор расхода горячего газа
Клапан для регулирования горячего газа
Способ выведения полезного груза на околоземные орбиты с помощью космической ракеты-носителя

