Результат интеллектуальной деятельности: Электрическая система привода реверсора тяги газотурбинного двигателя
Вид РИД
Изобретение
Изобретение относится к области авиации, к конструкции авиационных двигателей и тормозных устройств самолетов, а именно к приводам реверсивного устройства (далее РУ).
Наиболее близким к изобретению по технической сущности и достигаемому техническому результату, и выбранному авторами за прототип, является система привода реверсора тяги газотурбинного двигателя (Патент RU №2525884, МПК F02K 1/76, опубл. 20.08.2014).
Недостатком известного устройства системы привода реверса тяги газотурбинного двигателя является низкая надежность устройства, т.к. при определенных обстоятельствах может произойти повреждение различных частей механической системы синхронизации, что приведет к отсутствию синхронизации между приводами РУ, чрезвычайно высоким скручивающим нагрузкам при перемещении подвижной части и как следствие к заклинивание реверсивного устройства (далее РУ). Еще одним недостатком известного устройства системы привода реверса тяги газотурбинного двигателя является низкая точность синхронизации, так как ведомые привода ориентируются на ведущий привод, а не на сигналы системы РУ. Также каждое электромеханическое приводное устройство имеет двухобмоточный электродвигатель, то есть больший вес системы привода.
Технической задачей предлагаемого изобретения, на решение которой направлено заявляемое изобретение, снижение массы системы привода, повышение надежности системы привода реверсора тяги газотурбинного двигателя.
Техническая задача решается тем, что в электрической системе привода реверсора тяги газотурбинного двигателя, содержащей подвижную часть и неподвижную часть реверсора тяги, минимум один электронный блок управления и не менее двух электромеханических приводных устройств, установленных на неподвижной части, с возможностью перемещения подвижной части относительно неподвижной части, причем электромеханические приводные устройства синхронизированы электронной системой, а также источник питания, согласно изобретению, электромеханические приводные устройства и электронный блок управления установлены с возможностью получения электроэнергии через провода, подключенные к источнику питания с обеспечением равномерного распределения нагрузки между электромеханическими приводными устройствами.
В предлагаемом изобретении, в отличие от прототипа, электромеханические приводные устройства и электронный блок управления установлены с возможностью получения электроэнергии через провода, подключенные к источнику питания с обеспечением равномерного распределения нагрузки между электромеханическими приводными устройствами, что позволяет повысить надежность системы привода и получить данные о текущем положении РУ. В случае отказа одного из электроприводов РУ блок управления повысит и равномерно распределит нагрузку на оставшиеся агрегаты электромеханических приводных устройств, т.к. электромеханические приводные устройства подключены к единому источнику питания (не показано).
Техническое решение заключается в использовании электрической системы привода РУ без механической синхронизации, при этом учитывается определенное расположение электромеханических приводных устройств для равномерного распределения нагрузки между ними. Это позволяет выровнять мощностные требования к каждому отдельному электроприводу и выполнить их в универсальном виде. Предлагаемое изобретение не ограничивается использованием в сочетании с определенной конструкцией системы РУ. Техническое решение направлено на систему РУ решетчатого типа, следует отметить, что этот вариант можно применить и в других конструкциях системы приводов РУ, включая известные в данной области техники в настоящее время и создаваемые в будущем.
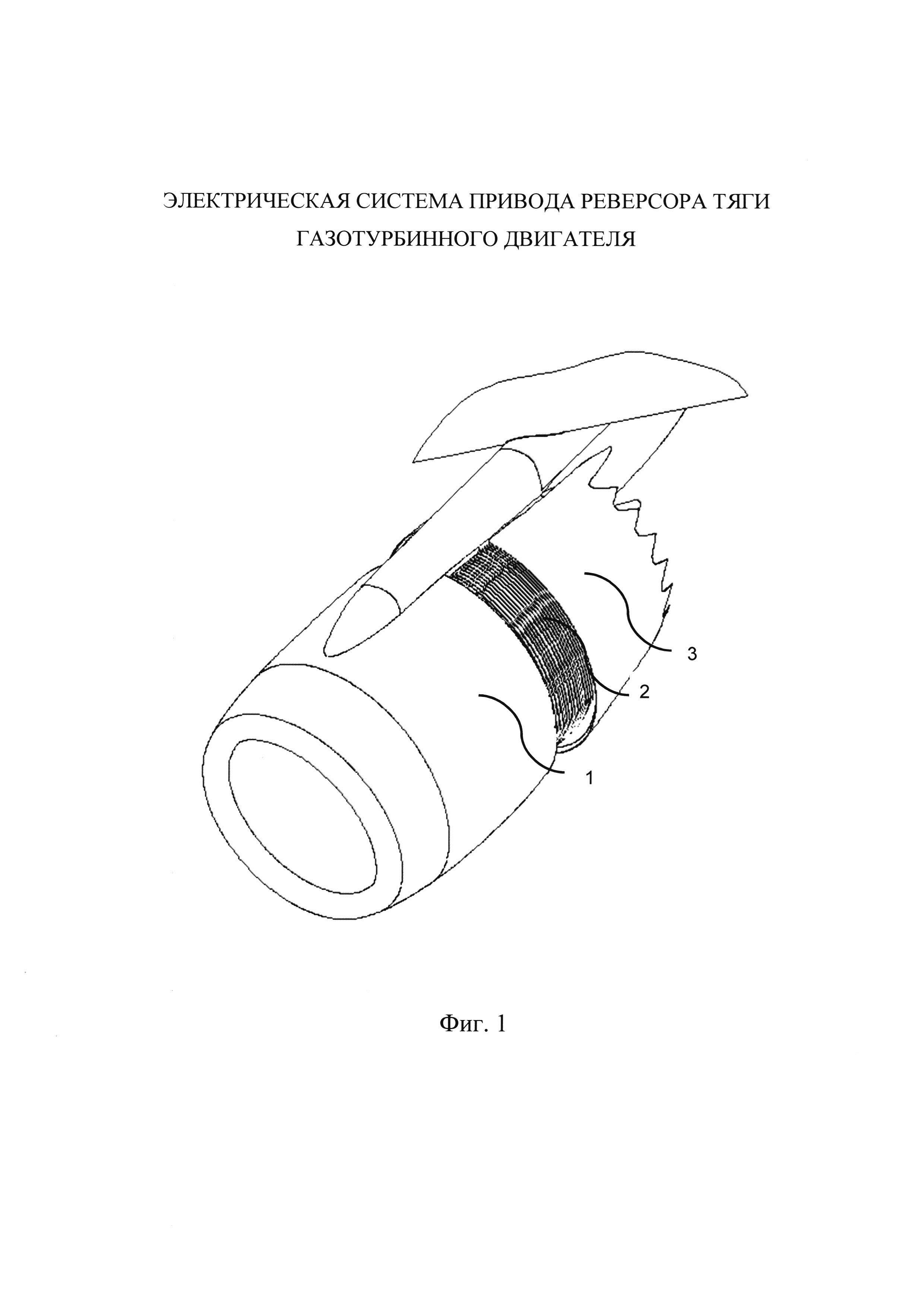
На фиг. 1 представлен общий вид газотурбинного двигателя.
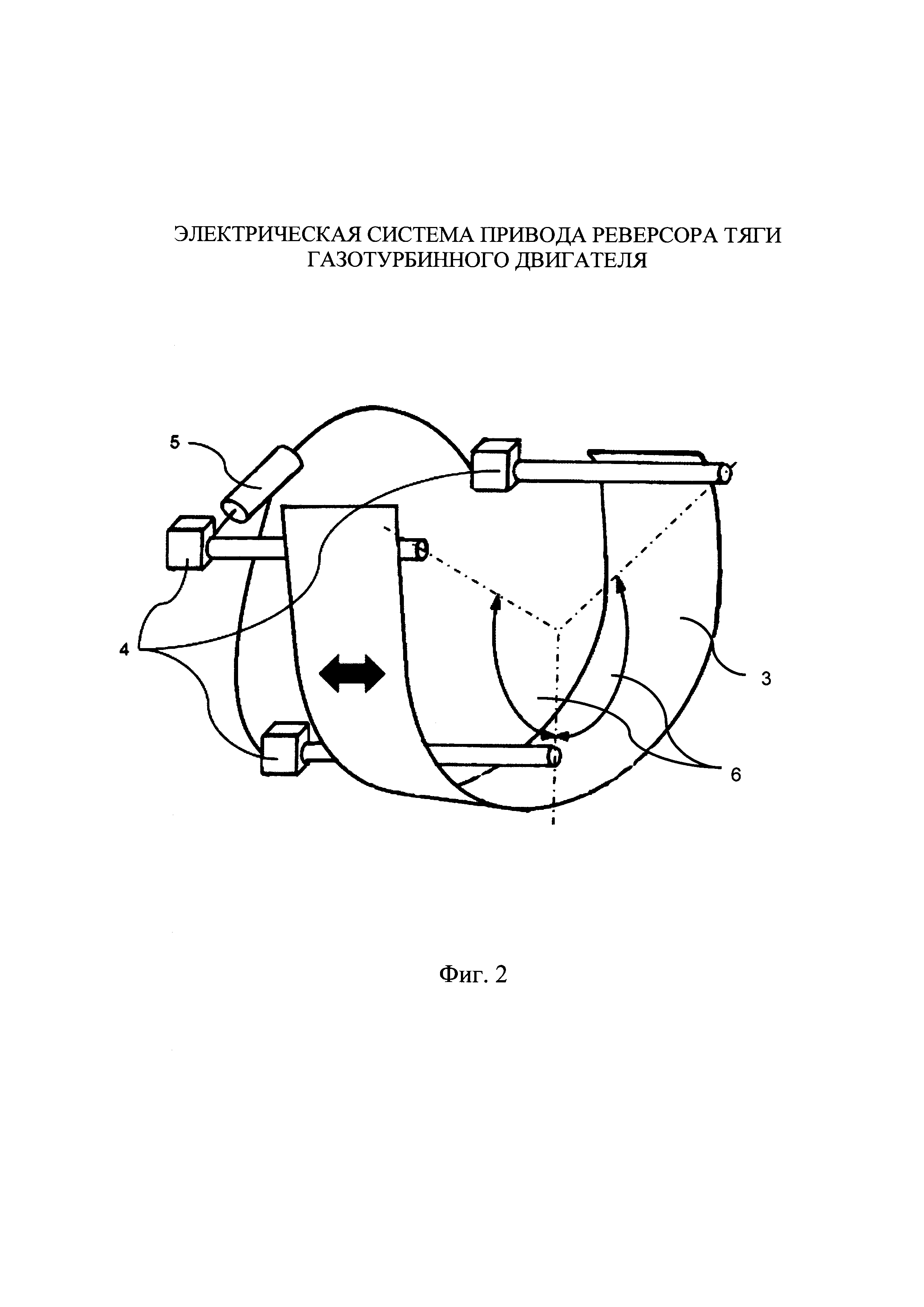
На фиг. 2 представлена схема электрической системы электромеханических приводных устройств на реверсоре тяги.
Электрическая система управления реверсора тяги реверсивного устройства (Фиг. 1) (без позиции), состоящего из неподвижной части 2 и подвижной части 3 газотурбинного двигателя 1 представлена в виде трех идентичных комплектов электромеханических приводных устройств 4 (Фиг. 2), каждый из которых подключен к подвижной части 3 и к электронному блоку управления 5.
Работа устройства осуществляется следующим образом. При подаче команды с системы управления (не показано) на открытие РУ с блока управления РУ 5 подается команда электроприводам 4 на открытие подвижной части РУ 3. При перемещении подвижной части РУ 3 сигнал о текущем положении с каждого электропривода 4 выдается в блок управления 5 РУ, где происходит анализ и равномерное распределение мощности на все электромеханические приводные устройства 4.
Несмотря на то, что система будет описываться как состоящая из трех идентичных комплектов электромеханических приводных устройств, и может применяться большее или меньшее их количество без выхода за пределы описания данного изобретения. Количество электромеханических приводных устройств 4 может меняться в соответствии с каждым конкретным случаем применения электрической системы управления.
Электронный блок управления 5 электрически подключается к электронной системе управления двигателем или самолетом.
Электромеханические приводные устройства 4 и электронный блок управления 5 получают электроэнергию через провода, подключенные к источнику питания (не показано).
Синхронизация по времени электромеханических приводных устройств 4 достигается при помощи электронного блока управления 5 для открытия или закрытия РУ в заданной последовательности без использования синхронизирующих механических устройств, что позволяет значительно снизить массу конструкции в целом. В ходе работы электронный блок управления 5 может устранять разность хода в маловероятном случае, когда один из электромеханических приводных устройств 4 движется быстрее или медленнее, чем другой. Данная разность хода может появиться вследствие различного фрикционного сопротивления на направляющих перемещения подвижной части РУ из-за загрязнения. Для устранения разности хода мощность для обеспечения синхронизации передается в любом направлении, например, в сторону снижения мощности одного из электромеханических приводных устройств 4 и повышения мощности другого, или наоборот.
В предлагаемом изобретении электромеханические приводные устройства 4 расположены между собой так, чтобы обеспечить равномерное распределения нагрузки, электромеханические приводные устройства имеют отдельный источник питания (без позиции). Из-за равномерной распределенной нагрузки отсутствие перемещения подвижной части РУ 3 возможно только при отказе двух из трех электромеханических приводных устройств 4. При отказе одного из электромеханических приводных устройств 4 блок управления 5 повысит и равномерно распределит мощность на оставшиеся два агрегата электромеханических приводных устройств 4 за счет того, что электромеханические приводные устройства подключены к отдельному источнику питания (не показан). Следует учитывать, что расположения между тремя электромеханическими приводными устройствами 4 выбраны из условия равномерного распределения воспринимаемой нагрузки.
Таким образом, выполнение предлагаемого изобретения с вышеуказанными отличительными признаками, в совокупности с известными признаками, повышает точность синхронизации со снижением массы привода и в целом повышает надежность электрической системы привода реверсора тяги газотурбинного двигателя.
Электрическая система привода реверсора тяги газотурбинного двигателя, содержащая подвижную часть и неподвижную часть реверсора тяги, минимум один электронный блок управления и не менее двух электромеханических приводных устройств, установленных на неподвижной части, с возможностью перемещения подвижной части относительно неподвижной части, причем электромеханические приводные устройства синхронизированы электронной системой, а также источник питания, отличающаяся тем, что электромеханические приводные устройства и электронный блок управления установлены с возможностью получения электроэнергии через провода, подключенные к источнику питания с обеспечением равномерного распределения нагрузки между электромеханическими приводными устройствами.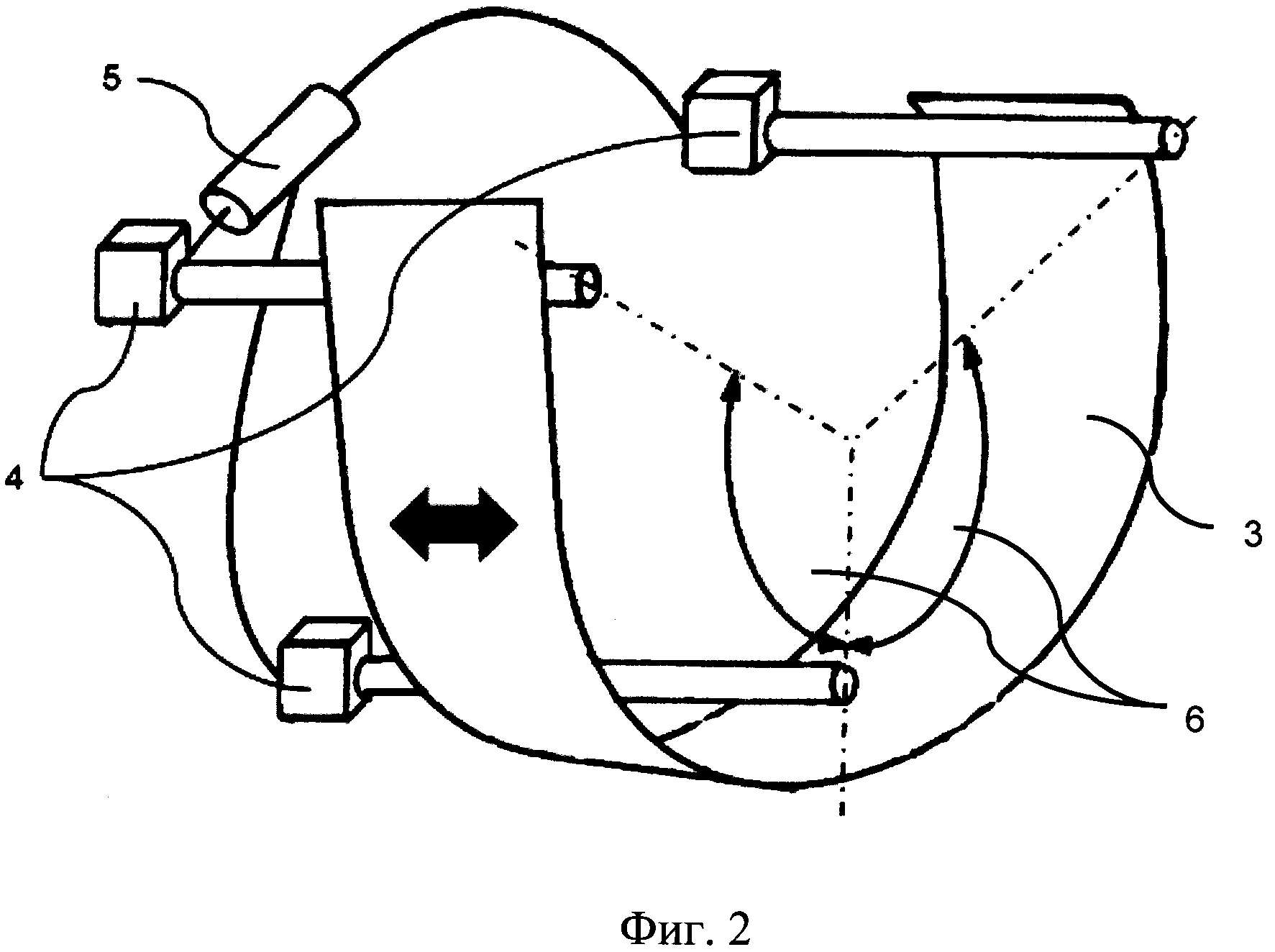
Способ защиты двухконтурного турбореактивного двигателя от раскрутки турбины низкого давления
Валопровод газотурбинного двигателя и способ его сборки
Устройство для присоединения реверсивного устройства к переднему корпусу двигателя
Газотурбинный двигатель
Шевронное сопло газотурбинного двигателя
Способ управления авиационным газотурбинным двигателем на взлетном режиме при пожаре
Устройство крепления нижней полки лопатки переходного канала между турбинами высокого и низкого давлений
Труба для распределения горячего воздуха по кромке носка воздухозаборника
Способ изготовления секций несущей решетки реверсера тяги
Многоколлекторное устройство подачи топлива в камеру сгорания газотурбинного двигателя
Реверсивное устройство турбореактивного двигателя
Устройство для присоединения реверсивного устройства к переднему корпусу двигателя
Шевронное сопло газотурбинного двигателя
Способ изготовления секций несущей решетки реверсера тяги
Отклоняющая решетка реверсивного устройства наружного корпуса двигателя
Замок реверсивного устройства газотурбинного двигателя
Сигнализатор закрытого положения механизма крепления реверсивного устройства мотогондолы к газотурбинному двигателю
Устройство для вскрытия оболочки экранно-вакуумной теплоизоляции космонавтом в процессе внекорабельной деятельности и способ его эксплуатации

