Результат интеллектуальной деятельности: Способ обработки гидролокационной информации
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации различного назначения.
Известна навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) по патенту РФ №2225991. Станция реализует следующую последовательность операций: излучение сигнала, прием эхосигнала, предварительную обработку, измерение параметров эхосигнала, определение классификационных признаков, измерение скорости звука, прослушивание сигнала шумоизлучения, классификацию целей по измеренным классификационным признакам и отображение на индикаторе.
Недостатком этого технического решения является то, что измерение параметров и принятие решения производится оператором по виду отображаемых отметок на яркостном индикаторе и для их интерпретации необходимо большое время.
Известен способ обработки гидролокационной информации по патенту РФ №2529441, содержащий излучение сигнала, прием отраженного эхосигнала, формирование веера статических характеристик направленности, цифровая многоканальная обработка, отображение на индикаторе в яркостном виде всего массива обработки, определение порога, пороговое обнаружение эхосигнала, определение эхосигналов превысивших порог по всей шкале дистанции, формирования строба по каждому обнаружению, автоматическое определение классификационных признаков по каждому обнаружению, формирование банка классификации по каждой обнаруженной цели, и отображение на индикаторе табло результатов классификации.
Недостатком данного технического решения является отсутствие автоматического обнаружения объектов и измерения параметров эхосигнала по визуальному отображению временных реализаций эхосигнала
Известен гидролокационный способ обнаружения подводных объектов в контролируемой акватории по патенту РФ №2242021, содержащий облучение водного пространства, прием эхосигналов, фильтрацию и отображение на экране двухкоординатного индикатора, который формирует трассы, образованные яркостными отметками и по наклону трасс производит классификацию объектов.
По количеству общих признаков этот способ является наиболее близким аналогом предлагаемого изобретения и может быть выбран в качестве прототипа.
Недостатком данного способа является то, что он не позволяет обнаруживать и классифицировать подводные кабели небольшого диаметра.
Как правило, оператору предоставляется отображение от всех целей в виде ярких точек, разной интенсивности по всем пространственным каналам и по всей шкале дальности на индикаторе обнаружения, и оператор должен выбрать цель по виду яркостной отметки. Пороговое обнаружение эхосигнала цели и классификация по некоторым классификационным признакам для известных целей не обеспечивают требуемой достоверности классификации в условиях априорной неопределенности. Визуальная информация по изменению амплитуды по времени и по пространству структуры эхосигнала, которая может быть использована оператором для классификации эхосигнала от кабеля малого диаметра, не всегда может быть достоверно обработана.
Задачей изобретения является повышение достоверности автоматического обнаружения и классификации эхосигналов от кабелей в неизвестных условиях.
Технический результат заключается в обеспечении автоматического обнаружения кабеля и определения его пространственного положения относительно направления движения гидролокатора.
Достижение технического результата обеспечивается тем, что в способ обработки гидролокационной информации, содержащий излучение сигнала, прием отраженного эхосигнала сформированным веером статических характеристик направленности, с образованием пространственных каналов, цифровую многоканальную обработку, отображение массива последовательных временных реализаций в яркостном виде за все время распространения по всем пространственным каналам, введены новые операции, а именно по каждому обнаруженному эхосигналу, определяют пространственный канал с максимальной амплитудой эхосигнала, определяют дистанцию Д1 по временному положению максимальной амплитуды, определяют угловое положение Q1 пространственной характеристики, в которой обнаружен эхосигнал относительно направления движения гидролокатора, определяют дистанцию R1 до точки пересечения с направлением движения гидролокатора R1=Д1/cosQ1, излучают второй зондирующий сигнал, измеряют дистанцию Д2 и угловое положение Q2 по пространственной характеристике, на которую принят второй зондирующий сигнал, определяют дистанцию R2 до точки пересечения с направлением движения гидролокатора по второму зондирующему сигналу R2=Д2/cosQ2, измеряют собственную скорость Vсоб и расстояние д, проходимое за время между первой и второй посылками д=V/(Т2-Т1), где Т2 и T1 времена излучения второго и первого зондирующих сигналов, и принимают решение, что обнаружено отражение от кабеля, если R2=R1-V(T2-Т1), а время встречи Tвстр до точки пересечения проекции траектории гидролокатора с отражающим кабелем определяется выражением Твстр=Т2+R2\Vсоб.
Поясним физическую сущность изобретения. Объекты, которые могут быть обнаружены гидролокатором, имеют различные физические характеристики. Как правило, подводные кабели располагаются на дне, что обеспечивает их безопасность. Эхосигналы от этих объектов будут отличаться по своим амплитудным, пространственным и временным характеристикам от прочих объектов. Поскольку кабели имеют малый диаметр, их эквивалентный радиус мал, а отражательная способность обеспечивается отражением зондирующего сигнала от кривизны цилиндрической поверхности кабеля, направленной по нормали относительно направления падения зондирующего сигнала. Для обнаружения эхосигнала от такого кабеля следует использовать многоканальный прием эхосигнала статическим веером характеристик направленности, что обеспечивает пространственную селекцию обнаруженных объектов по всем пространственным каналам. Если характеристики направленности достаточно узкие, то эхосигнал от объекта, может находиться только в одном пространственном канале, поскольку только в одном узком направлении будет формироваться индикатриса рассеяния по нормали от кривизны цилиндрического кабеля малого диаметра. По другим направлениям эхосигнал будет рассеиваться, и уровень эхосигнала в соседних пространственных каналах будет мал. Эта физическая особенность отражения от тонкого отражателя, имеющего четко выраженную точку отражения по нормали, обеспечивает обнаружение когерентного эхосигнала только в одном пространственном канале. (Е.А. Штагер, Е.В. Чаевский «Рассеяние волн на телах сложной формы» М. Сов. Радио, 1974 г.) Однако, в окружающей акватории всегда имеются случайные отражатели, ориентированные по нормали относительно других характеристик направленности. Для того, что бы отсеять эти случайные отражатели от детерминированного протяженного цилиндрического отражателя, которым является кабель, заключенный в отражающую оболочку, можно воспользоваться последовательностью эхосигналов подвижного гидролокатора. Гидролокатор движется прямолинейно с постоянной скоростью, поэтому два последовательных эхосигнала будут связаны линейной зависимостью. Измеряется время излучения Т1 и время приема эхосигнала Т1эхо, определяется дистанция по первому эхосигналу Д1, определяется угол пространственной характеристики относительно направления движения Q1 и определяется дистанция R1 до точки пересечения направления движения и направления расположения отражающего кабеля R1=Д1\cosQ1. По второй посылке так же измеряется время излучения Т2 и время приема эхосигнала Т2эхо, определяется дистанция по первому эхосигналу Д2, определяется угол пространственной характеристики относительно направления движения Q2 и определяется дистанция R2 до точки пересечения направления движения и направления расположения отражающего кабеля R2=Д2\cosQ2. Измеряется собственная скорость движения Vсоб и определяется расстояние проходимое гидролокатором за время между излучением зондирующих сигналов д=(Т2-T1)Vсоб. Поскольку гидролокатор движется линейно и равномерно, то должно соблюдаться равенство (R1-R2)=(Т2-T1)Vсоб, а время до точки пересечения проекции траектории движения гидролокатора с отражающим кабелем определяется по формуле Твстр=Т2+R2\Vсоб.
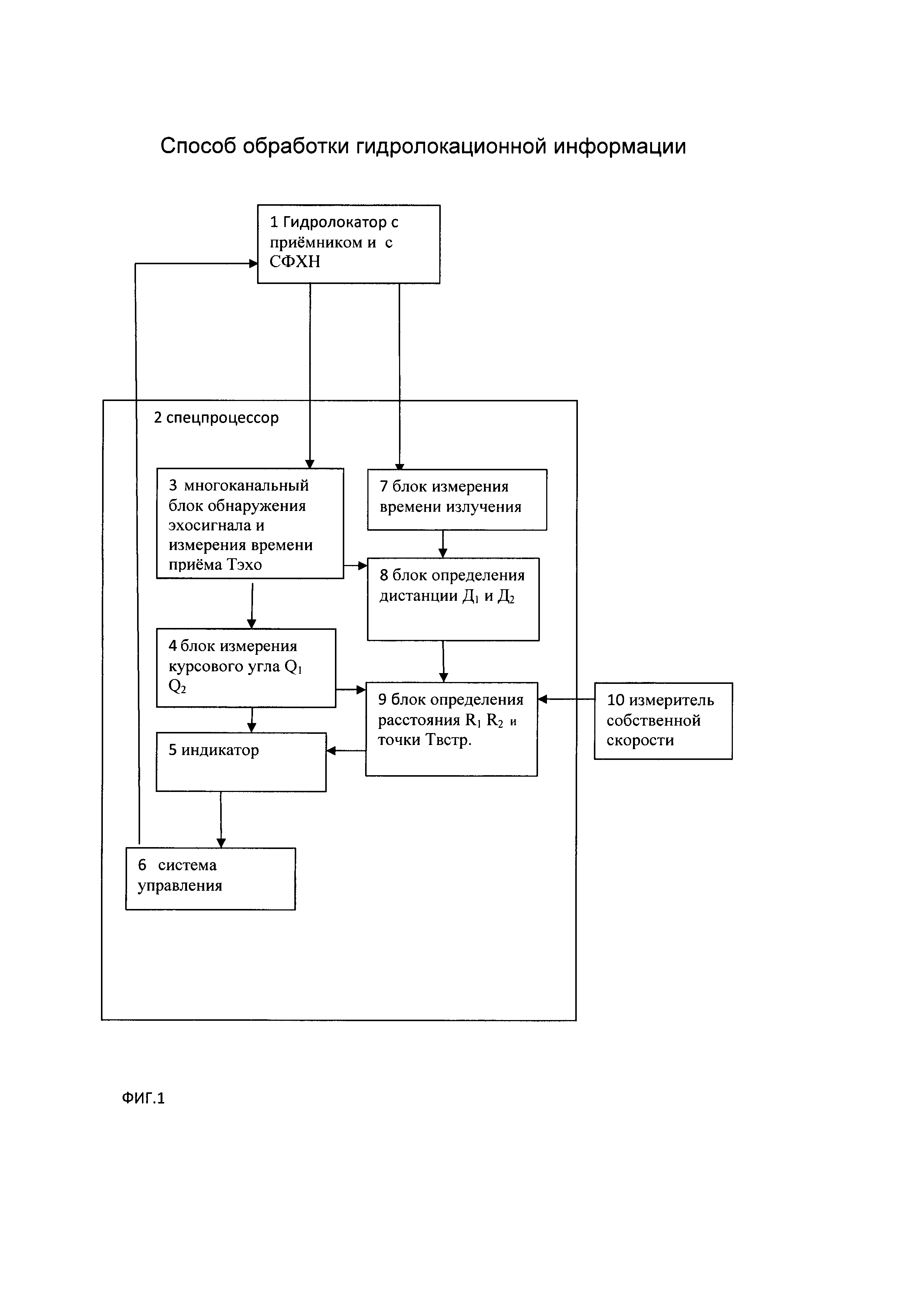
Сущность изобретения поясняется фиг 1, на которой представлена блок-схема устройства, реализующая предлагаемый способ.
На фиг. 1 гидролокатор 1 с приемным устройством и системой формирования характеристик направленности (СФХН) приемной антенны последовательно соединен со спецпроцессором 2, в состав которого входят последовательно соединенные многоканальный блок 3 обнаружения эхосигнала и измерения времени прихода эхосигналов Тэхо, блок 4 измерения курсовых углов Q1, Q2, индикатор 5 и система 6 управления, выход которой соединен с гидролокатор 1. Также спецпроцессор 2 содержит последовательно соединенные блок 7 измерения времен излучения, блок 8 определения дистанции Д1, Д2 и блок 9 определения расстояний R1, R2, и времени точки встречи Твстр. Второй выход гидролокатора 1 через блок 7 измерения времен излучения, через блок 8 определения дистанции Д1, Д2, через, блок 9 определения расстояний R1, R2, и времени точки Твстр, соединен со вторым входом блока 5 индикатора. Второй выход блока 4 соединен со вторым входом блока 9, на третий вход которого поступает сигнал с блока 10 измерителя собственной скорости. Второй выход блока 3 соединен со вторым входом блока 8.
Гидролокатор 1 с приемным устройством и системой формирования характеристик направленности являются известными устройствами, которые широко используются на современных судах. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 92) В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также корреляционную обработку и процедуры анализа временных реализаций. Эти все вопросы разработки и применения спецпроцессоров достаточно подробно рассмотрены в литературе по цифровой обработке. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука»2004 г. стр. 281). Эти же процедуры измерения и обработки могут быть реализованы на современных компьютерах, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург» 2011 г).
Измерители собственной скорости ЛАГИ являются известными устройствами, которые выпускаются серийно и достаточно подробно описаны в отечественной литературе. Они представляют собой отдельный специальный гидролокатор, рассмотренный в книге А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства». СПб, 2009 г. Там же рассмотрены вопросы измерения курсового угла обнаруженного объекта относительно направления движения гидролокатора.
Реализация способа с помощью предлагаемого устройства осуществляется следующим образом. С блока 6 управления поступает команда на излучение сигнала гидролокатором 1. Время излучения сигнала T1 и Т2 через спецпроцессор 2 и передается в блок 8 определения дистанции. Отраженные эхосигналы принимаются приемником гидролокатора 1 и системой формирования характеристик направленности и передаются через спецпроцессор 2 в блок 3 многоканальной обработки для определения времени прихода эхосигналов T1эхо и Т2эхо. Измеренное время прихода эхосигналов передается в блок определения дистанции 8 для определения дистанций Д1 и Д2 и в блок 4 определения курсового угла Q1 и Q2 цели относительно направления движения гидролокатора. Измерение дистанции Д1 и Д2 и времен излучения Т1 и Т2 и обнаружения эхосигналов T1эхо и Т2эхо являются известными операциями, которые производятся в любом гидролокаторе и в прототипе по своему прямому назначению. Измеренные курсовые углы передаются в блок определения расстояний R1 и R2, а так же определения времени точки встречи Твстр движущегося гидролокатора с обнаруженным кабелем. На третий вход блока 9 поступает информация о собственной скорости Vсоб для идентификации измеренных оценок дистанции. С выхода блока 9 измеренные параметры передаются на индикатор 5 для отображения. При этом на индикаторе отображается результаты измерения, класс обнаруженного объекта и положение точки пересечения проекции траектории движения, и направление расположения обнаруженного кабеля.
Таким образом, предлагаемый способ обработки гидролокационной информации позволит предоставлять оператору информацию о наличии обнаруженного кабеля, идентифицировать его по нескольким посылкам и определять расстояние до точки пересечения гидролокатора с кабелем и время до точки встречи.
Способ обработки гидролокационной информации, содержащий излучение сигнала, прием отраженного эхосигнала сформированным веером статических характеристик направленности, с образованием пространственных каналов, цифровую многоканальную обработку, отображение массива последовательных временных реализаций в яркостном виде за все время распространения по всем пространственным каналам, отличающийся тем, что по каждому обнаруженному эхосигналу определяют пространственный канал с максимальной амплитудой эхосигнала, определяют дистанцию Д по временному положению максимальной амплитуды, определяют угловое положение Q пространственной характеристики, в которой обнаружен эхосигнал относительно направления движения гидролокатора, определяют дистанцию R до точки пересечения с направлением движения гидролокатора R=Д/cosQ, излучают второй зондирующий сигнал, измеряют дистанцию Д и угловое положение Q по пространственной характеристике, на которую принят второй зондирующий сигнал, определяют дистанцию R до точки пересечения с направлением движения гидролокатора по второму зондирующему сигналу R=Д/cosQ, измеряют собственную скорость V и расстояние д, проходимое за время между первой и второй посылками д=V(T-T), где Т и T времена излучения второго и первого зондирующих сигналов, и принимают решение, что обнаружено отражение от кабеля, если R=R-V(T-Т), а время встречи Т до точки пересечения проекции траектории гидролокатора с отражающим кабелем определяется выражением Т=Т+R\V.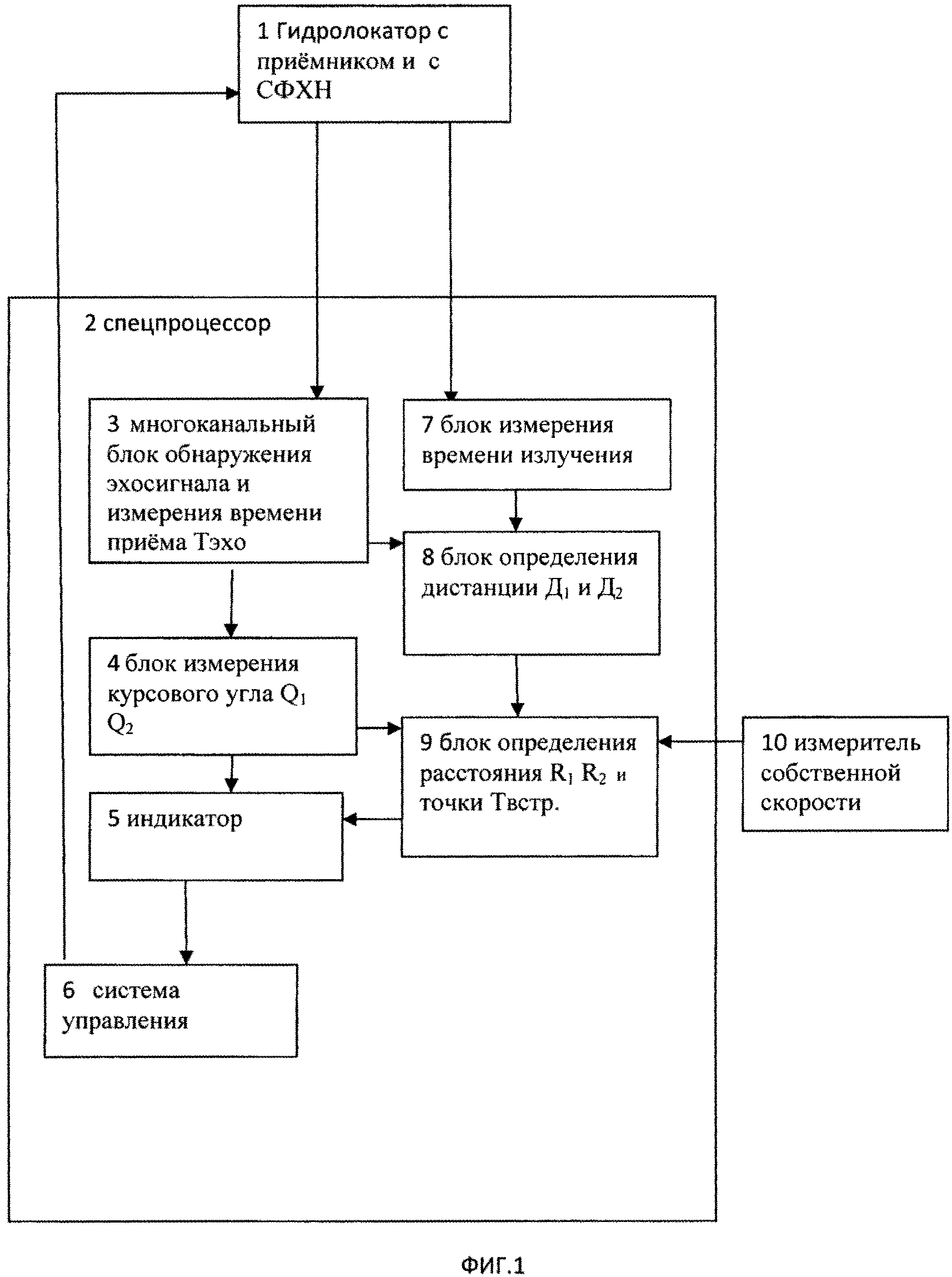
Гидролокатор с трактом прослушивания эхо-сигналов
Гидроакустический способ управления торпедой
Концентратомер подвижных инфузорий в жидких средах
Гидролокационный способ классификации подводных объектов в контролируемой акватории
Способ определения параметров цели гидролокатором
Гидроакустический модуль сейсмокосы и способ его изготовления
Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели
Устройство получения информации о шумящем в море объекте
Устройство и способ энергосбережения автономного приемопередатчика морского радиогидроакустического буя
Способ определения текущих координат цели в бистатическом режиме гидролокации
Способ автоматической классификации
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда
Способ оценки дистанции до шумящего в море объекта
Способ адаптивной обработки сигнала шумоизлучения
Гидроакустический способ определения пространственных характеристик объекта
Способ классификации шумящих объектов
Способ измерения дистанции гидролокатором
Способ обработки сигнала шумоизлучения объекта
Способ измерения скорости звука

