Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано в навигационных приборах обнаружения льда и измерения его характеристик.
Как правило, такие приборы используются подводными носителями, для которых необходимо знание ледовой обстановки, в том числе дистанционная оценка толщины льда с высокой точностью при движении подо льдом на фиксированной глубине.
Известен акустико-гидростатический способ измерения толщины погруженной части льда, который содержит измерение высоты водяного столба, измеряемого датчиком забортного давления и измерение расстояние до нижней поверхности льда, определяемое эхолотом. Толщина льда при этом есть разность измеренной высоты столба и оценки расстояния до нижней поверхности льда (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства», СПб., изд. «ЛЭТИ», 2009 г., с. 123-170). Основным недостатком этого способа является недостаточная точность измерения, которая определяется низкой точностью гидростатического измерителя, зависящей от знания атмосферного давления на момент измерения, и точностью измерения эхолотом, показания которого зависят от точности измерения скорости звука. Скорость звука может быть измерена на глубине движения, а по трассе распространения сигнала и, особенно, в районе, близком к кромке льда, измерить ее практически невозможно.
Для измерения толщины молодого морского льда значительный интерес представляют чисто акустические способы измерения.
Известен способ измерения толщины льда с использованием параметрического излучения. Нелинейное взаимодействие в воде сигналов 2-х частот приводит к возникновению разностной частоты, на которой и измеряется толщина льда. Характеристики направленности имеют практически такую же ширину, как и на исходных частотах накачки. Практическая реализация эхо ледомера на параметрическом методе излучения столкнулась с рядом технических и технологических трудностей, присущих параметрическому методу, которые не позволили обеспечить требуемую точность измерения во всем диапазоне толщин льда, тем более на дистанции упреждения.
В настоящее время для измерения толщины льда используются гидроакустические эхоледомеры (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника.-СПб.: Наука, 2004 г., с. 127-142).
Способ, реализованный в гидроакустическом эхоледомере, по количеству общих признаков является наиболее близким аналогом предлагаемого способа.
Гидроакустический эхоледомер свободен от недостатков акусто-гидростатического, так как его показания не зависят от абсолютного гидростатического давления. Гидроакустический эхоледомер состоит из высокочастотного канала, который содержит генератор, антенну, приемник и измеритель расстояния, низкочастотного канала, содержащего генератор, антенну, приемник и измеритель расстояния, индикатор и блок измерения толщины льда. Зондирующий импульс с высокочастотной несущей отражается от нижней поверхности льда, а сигнал низкочастотной несущей - от его верхней поверхности. Физической основой этого эффекта служит аномально большое затухание акустической энергии в кристаллической структуре молодого льда, обнаруженное во время изучения его акустических свойств. При очень низких частотах порядка 1 кГц затухание сигнала в толще льда небольшое, при частотах выше 100 кГц затухание настолько сильное, что эхосигнал формируется только самым нижним слоем льда. (В.В. Богородский, Г.Е. Смирнов, С.А. Смирнов. «Поглощение и рассеяние звуковых волн морским льдом». Труды ААНИИ. Л., 1975 г., с. 128-134).
При толщине льда меньше 0,5 м, что соответствует молодому льду, точность измерения толщины льда таким способом недостаточна для решения практических задач при измерении по курсу движения. Кроме того, этот способ требует участия оператора для ручной отработки результатов.
Задачей предлагаемого способа является дистанционное измерение толщины льда движущимся гидролокатором с подводного носителя по курсу его движения.
Технический результат изобретения заключается в обеспечении дистанционного измерения толщины льда впереди по курсу движения подводного гидролокатора с упреждением.
Для обеспечения заявленного технического результата в известный способ измерения толщины льда, содержащий излучение из подводного положения носителя в направлении льда высокочастотных зондирующих сигналов, прием отраженных ото льда сигналов, введены новые признаки, а именно, излучение зондирующих высокочастотных сигналов производят в направлении по ходу движения носителя, измеряют глубину погружения Н носителя, принимают отраженные от кромки льда эхосигналы веером узконаправленных характеристик в горизонтальной плоскости в диапазоне передней полусферы, производят последовательный набор временных реализаций по всем пространственным характеристикам направленности, последовательное аналого-цифровое преобразование сигнала, последовательную когерентную обработку, производят измерение уровня помехи по первому циклу набора как среднее значение всех амплитудных составляющих по всем пространственным каналам Апом, производят выбор порога, по каждому пространственному каналу определяют амплитуды эхосигнала превысившего порог, измеряют амплитуды эхосигнала Аэхо, измеряют номера пространственных каналов, в которых произошло превышение сигнала над порогом, определяют дистанции до кромки льда Д по каждому пространственному каналу, по измеренной глубине погружения Н и измеренной дистанции Д, определяют угол отражения эхосигнала как Q°=аrсsinН/Д, выбирают эхосигналы, которые имеют угол отражения в диапазоне 10°-30° и принадлежат тем характеристикам направленности в горизонтальной плоскости, которые отстоят от направления движения на угол не больше 30°, определяют коэффициент контраста S(Q) по формуле S(Q)=Аэхо/Авод, а толщину льда Тльда определяют по формуле Тльда=S(Q)70к, где к - поправочный коэффициент, связанный с особенностями калибровки аппаратуры, Авод амплитуда отражения от поверхности воды для глубины Н, которая определяется по формуле Авод=20Апом-(Н-100)0,05.
Поясним достижение технического результата.
Сущность работы предлагаемого способа основана на физических принципах гидроакустического метода, в котором используется зависимость отражательной способности льда от утла падения высокочастотного зондирующего сигнала. Определяется коэффициент контраста, который связан с звукорассеивающими свойствами льда, различающегося степенью шероховатости нижней поверхности по сравнению с отражательной способностью поверхности воды. Значения коэффициента контраста определяются по соотношению эхосигналов от исследуемой поверхности льда и сигнала отраженного от эталонного отражателя, в качестве которого используется поверхность воды, свободная ото льда.
В работе Труды 8 международной конференции «Прикладные технологии гидроакустики и гидрофизики». Санкт Петербург. «Наука». 2006 г., стр 11. С.А. Смирнов «Применение имидж-сонаров в качестве инструмента исследования океана» приведена зависимость коэффициента контраста, которая определяется выражением
S(Q)=Jобрат.рас.льда/Jотр.воды,
где Jобрат.рас.льда - интенсивность эхосигнала, отраженного льдом при облучении под углом 20° к поверхности;
Jотр.воды - интенсивность эхосигнала, отраженного от поверхности воды, при излучении на глубине 100 м.
Известно (Е.В. Шишкова «Физические основы промысловой гидроакустики».-М. Пищепром. 1977 г., стр. 23), что интенсивность эхосигнала, отраженного от объекта, связана с коэффициентом отражения µ и эффективной площадью рассеивающего отражателя П.
Тогда можно определить коэффициент контраста как отношение интенсивности сигнала, отраженного ото льда, к интенсивности сигнала, отраженного от водной поверхности:
Jльда/Jотр.вод=Пльдаµльда/Пводыµводы
Если угол облучения фиксирован, частота излучения известна и дальность фиксирована, то для этих условий коэффициент контраста будет определяться площадью отражения и коэффициентом обратного рассеяния, а если и площади равны, то только коэффициентами обратного рассеяния льда и воды.
S(Q)=µльда/µводы=Jльда/Jотр.вод
Интенсивность эхосигнала определяется по величине измеренной амплитуды эхосигнала на выходе линейного приемника (Шишкова Е.В. «Физические основы промысловой гидроакустики».-М.: Пищепром, 1977 г., стр 49). Поэтому, измеряя амплитуду эхосигнала, отраженного от кромки льда под углом 20 градусов, и измерив амплитуду эхосигнала, отраженного от воды, можно получить коэффициент контраста. Воспользуемся значением акустического коэффициента контраста молодого льда, полученного в работе Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника».-СПб.: Наука, 2004 г., с. 127-142, где приведена экспериментальная зависимость коэффициента контраста замерзающего разводья (молодого льда) при угле скольжения 20°. По этой зависимости можно определить коэффициент пропорциональности между коэффициентом контраста и толщиной молодого льда в см, на основании чего получим соотношение между толщиной льда в см и коэффициентом контраста Тльда=70кS(Q), где Тльда - толщина льда в см, S(Q) - коэффициент контраста, а к - поправочный коэффициент, определяемый калибровкой аппаратуры, 70 - коэффициент пропорциональности, полученный из экспериментальной зависимости между коэффициентом контраста и толщиной льда в см (см. выше).
Соотношение уровней сигналов, рассеянных свободной поверхностью моря, и помехи, обусловленной объемной реверберацией, известно. При угле 30 градусов и глубине 100 метров это соотношение равно 20 (стр. 138 там же). Если за уровень изотропной помехи принять Апом - уровень изотропной помехи, измеренной как среднее значение помехи принятое по всем пространственным каналам горизонтального статического веера в первом цикле обработки, то получим: (Jотр. от воды 100 м/Jобъмн.рев)=20 или можно положить,что амплитуда сигнала, отраженного от воды, при измерении на глубине 100 м
Асиг.вод100/Апом=20.
Если глубина отличается от 100 метров (90, 120, 130, и т.д), то можно ввести корректировку (Н-100)0,05. и тогда Авод=Апом[20-(Низм-100)0,05]. Тогда толщина льда определяется по формуле Тдьда=70кАэхо/Авод,
Блок-схема устройства, реализующего предложенный способ, представлена на фиг. 1.
Устройство содержит антенну 1, которая через коммутатор 2 приема передачи, через приемное устройство 4 с системой формирования характеристик направленности (СФХН), спецпроцессор 5 обработки входных данных и выработки оценки толщины льда соединена с индикатором 8 отображения сектора обзора по ходу движения. Генератор 3 соединен со вторым входом коммутатора 2, а измеритель глубины 6 соединен со вторым вход спецпроцессора обработки 5, третий вход которого соединен с блоком 7 формирования априорных данных.
Реализацию способа целесообразно рассмотреть на примере работы устройства.
Генератор 3 передает через коммутатор 2 зондирующие сигналы высокой частоты на высокочастотную антенну 1. Эти зондирующие сигналы излучаются антенной 1 в направлении льда по ходу движения носителя. Отраженные эхосигналы принимаются антенной 1 и через коммутатор 2 передаются на приемное устройство 4, которое принимает эхосигналы с используемой системой формирования характеристик направленности в секторе верхней полусферы. Антенна, коммутатор, генератор, приемное устройство являются известными техническими приборами, которые используются в прототипе и достаточно подробно описаны в отечественной аппаратуре. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника».-СПб.: Наука, 2004 г., с. 127-142). Принятые пространственными характеристиками направленности эхосигналы в устройстве 4 преобразуются аналогово-цифровыми преобразователями в цифровую форму и передаются для обработки в спецпроцессор 5, где производится когерентная обработка принятых реализаций, измерение помехи, выбор порога обнаружения, определение эхосигналов, превысивших порог, измерения пространственного канала сектора верхней полусферы, в котором обнаружен эхосигнал, измерение амплитуды эхосигнала, измерение дистанции Д до кромки льда. Одновременно в спецпроцессор 5 непрерывно поступает оценка глубины погружения носителя гидролокатора Н из блока 6 измерителя глубины и производится определение по формуле Q°=arcsinH/Д угла прихода эхосигналов. Измеритель глубины погружения является известным устройством, которое установлено на всех подводных носителях. По эхосигналам, которые соответствуют выбранным углам прихода по формуле в вертикальной плоскости и выбранным углам прихода 30° в горизонтальной плоскости по номерам пространственных каналов, выбирается амплитуда эхосигнала, отраженная от кромки льда Аэхо и по формуле Тльда=70кАэхо/Авод определяется толщина льда. Для качественного решения задач обработки гидроакустической информации на современных кораблях используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе и для автоматического измерения толщины льда (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника.-СПб.: Наука, 2004 г, с. 281).
Из блока 7 формирователя априорных данных поступают табличные значения Авод и поправочные значения коэффициента к, полученные при проведении калибровочных работ. Из спецпроцессора 5 на индикатор 8 поступает в яркостном виде отображение ледовой обстановки по всем пространственным горизонтальным каналам верхней полусферы. При этом яркость соответствует коэффициенту контрастности принятых эхосигналов или толщинам льда в направлении движения носителя.
Таким образом, предлагаемое техническое решение позволяет автоматически измерять толщину льда с подводного носителя при движении в подводном положении впереди направления движения с упреждением в несколько сотен метров.
Способ измерения толщины льда, содержащий излучение из подводного положения носителя в направлении льда высокочастотных зондирующих сигналов, прием отраженных ото льда сигналов, отличающийся тем, что излучение зондирующих высокочастотных сигналов производят в направлении по ходу движения носителя, измеряют глубину погружения Н носителя, принимают отраженные от кромки льда эхосигналы веером узконаправленных характеристик в горизонтальной плоскости в диапазоне передней полусферы, производят последовательный набор временных реализаций по всем пространственным характеристикам направленности, последовательное аналого-цифровое преобразование сигнала, последовательную когерентную обработку, производят измерение уровня помехи по первому циклу набора как среднее значение всех амплитудных составляющих по всем пространственным каналам А, производят выбор порога, по каждому пространственному каналу определяют амплитуды эхосигнала, превысившего порог, измеряют амплитуды эхосигнала А, измеряют номера пространственных каналов, в которых произошло превышение сигнала над порогом, определяют дистанции до кромки льда Д по каждому пространственному каналу, по измеренной глубине погружения Н и измеренной дистанции Д определяют угол отражения эхосигнала как Q°=arcsinH/Д, выбирают эхосигналы, которые имеют угол отражения в диапазоне 10°-30° и принадлежат тем характеристикам направленности в горизонтальной плоскости, которые отстоят от направления движения на угол не больше 30°, определяют коэффициент контраста S(Q) по формуле S(Q)=А/А, а толщину льда Т в сантиметрах определяют по формуле Т=S(Q)70к, где к - поправочный коэффициент, связанный с особенностями калибровки аппаратуры, А - амплитуда отражения от поверхности воды для глубины Н, которая определяется по формуле А=20А-(Н-100)0,05.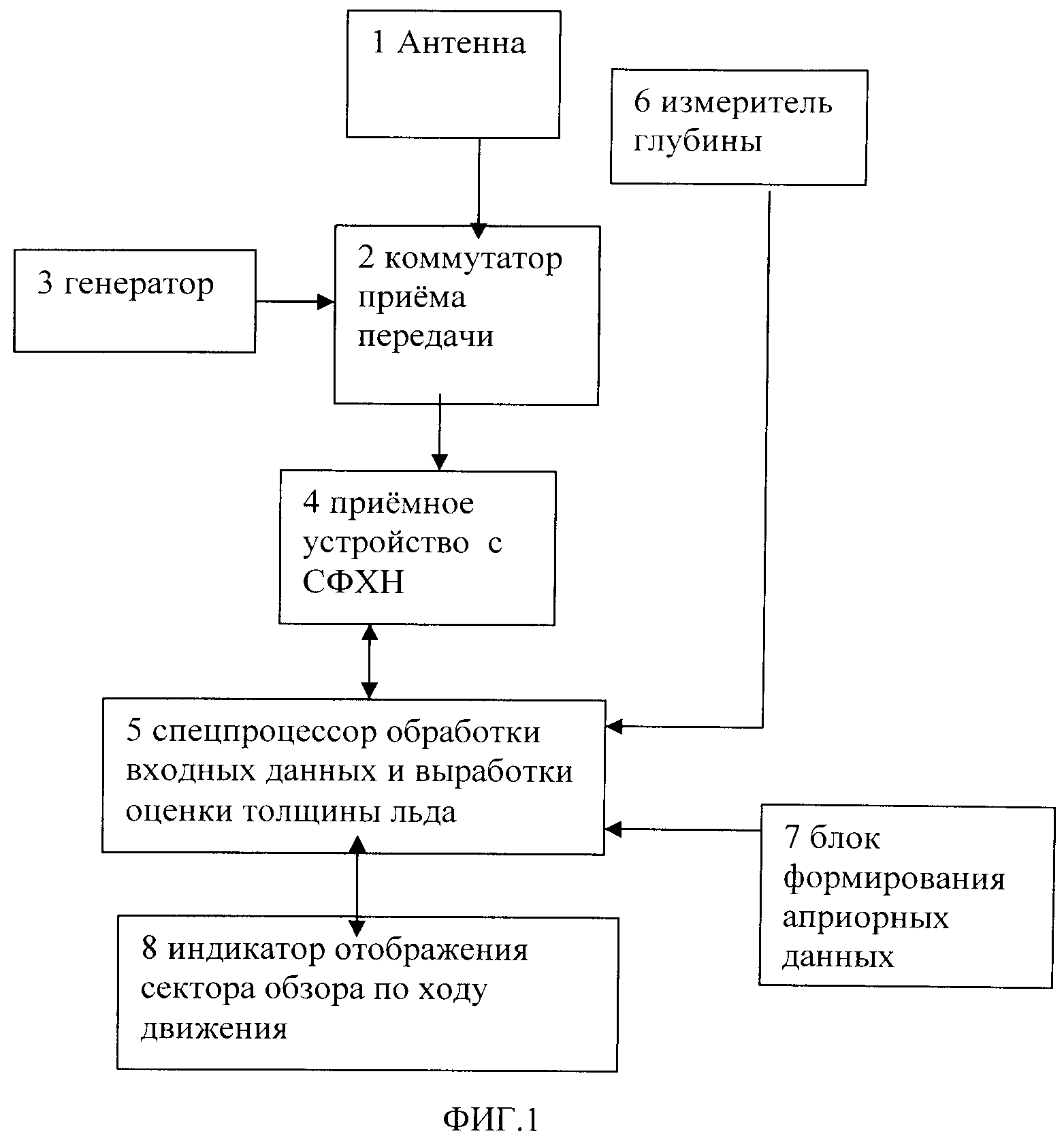
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ пассивного определения координат источников излучения
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ пассивного определения координат источников излучения
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором

