Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики и может быть использовано для измерения высоты объекта, обнаруженного на дне с использованием гидролокатора ближнего действия.
Известны методы обнаружения объекта, находящегося вблизи подвижного носителя в водной среде, с использованием гидролокатора, установленного на этом носителе. Использование этих методов позволяет обнаруживать объект, измерять до него дистанцию и измерять направление на объект (Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. Л.: Судостроение, 1983).
Для этого излучают зондирующий сигнал, измеряют время задержки между излученным сигналом и принятым эхосигналом от объекта, определяют дистанцию до обнаруженного объекта по величине временной задержки и известной скорости распространения звука и определяют направления прихода отраженного сигнала в горизонтальном направлении. Эти методы позволяют обнаруживать объекты на дне, но они не позволяют измерять высоту этих объектов.
Известен «Способ и устройство определения глубины подводного объекта», авторы SATO KAZUO и др. по патенту JP 02708109 В2 от 04.02.98. G01S 15/10 HITACYI LTD, который основан на том же принципе, что и предыдущий способ, но определение направления производится с использованием сканирования характеристики направленности в вертикальной плоскости при излучении зондирующего сигнала узкой характеристикой направленности. Этот способ также не позволяет определить высоту объекта над дном.
В современной гидроакустике нашли применение методы, основанные на анализе особенностей формы тени, отбрасываемой объектом при его облучении зондирующим сигналом. Эффективность этих методов определяется ракурсом объекта и его положением относительно углов облучения (А.А. Корякин. Корабельная гидроакустическая техника. СПб: «Наука», 2004, стр. 35-40). Трудности обнаружения теневого параметра неоднократно обсуждались в научной литературе «О путях увеличения вероятности теневого изображения протяженных объектов» Я.В. Моисеенко в Трудах 8 международной конференции «Прикладные технологии гидроакустики и гидрофизики» СПб. 2006, стр. 161-165. Оценка возможности использования тенеграфического изображения для решения задач классификации рассмотрена применительно к отображению в координатах, курс дальность в работе А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Судостроение, 1983, Л., стр. 122-128).
Однако ни в одном этих из источников не рассматриваются вопросы измерения высоты обнаруженного объекта над уровнем дна.
Наиболее близким аналогом, который содержит по существу близкие операции, является способ измерения глубины погружения объекта по патенту РФ №2350983. Способ содержит излучение зондирующего сигнала, прием эхосигнала и измерение дистанции D1 на момент времени t1, в момент времени t1+Δt повторяют процедуру измерения дистанции до объекта, определяют дистанцию D2 до объекта в момент времени t1+Δt, определяют скорость движения носителя Vсоб и глубину погружения объекта относительно горизонта движения носителя определяют по формуле  , где
, где  , где D1 - дистанция до объекта в момент времени t1, D2 - дистанция до объекта на момент времени t1+Δt, Vсоб. - скорость перемещения излучателя. Недостатком этого способа является невозможность определения высоты объекта, обнаруженного гидролокатором на дне, а также зависимость оценки глубины от числа посылок и пройденного расстояния.
, где D1 - дистанция до объекта в момент времени t1, D2 - дистанция до объекта на момент времени t1+Δt, Vсоб. - скорость перемещения излучателя. Недостатком этого способа является невозможность определения высоты объекта, обнаруженного гидролокатором на дне, а также зависимость оценки глубины от числа посылок и пройденного расстояния.
Настоящее техническое решение позволяет устранить этот недостаток и обеспечить измерение высоты объекта на уровне дна по одной посылке.
Задачей изобретения является расширение функциональных возможностей способа.
Для решения поставленной задачи в известный способ, содержащий излучение зондирующего сигнала, прием эхосигнала, определение дистанции до объекта D по величине временной задержки эхосигнала и известной скорости распространения звука С, введены дополнительные признаки, а именно: после излучения измеряют уровень объемной реверберации U0, определяют порог обнаружения Uпор, измеряют tнач время начала эхосигнала, при котором впервые амплитуда эхосигнала Аоб превысила порог Аоб>Uпор, и определяют дистанцию D0=0,5 С tнач, измеряют момент времени последней амплитуды эхосигнала tпос,
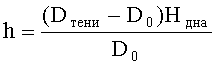
при котором минимальная амплитуда эхосигнала от объекта Аоб>Uпор, определяют момент времени начала тени tтени, при котором выполняется условие U0≥Атен и tтени>tпос, определяют момент времени окончания тени tкон.т, при котором Uпор>Аоб≥U0, определяют дистанцию до момента окончания тени Dтени=0,5 С tкон.т, определяют глубину от гидролокатора до дна Ндна, а высоту объекта определяют по формуле  .
.
Техническим результатом предложенного способа является определение высоты обнаруженного объекта над уровнем дна, по одной посылке.
Поясним достижения указанного технического результата.
Сущность предлагаемого способа заключается в следующем. Эхосигнал от локального объект формируется на основе отражения энергии падающего зондирующего сигнала на объект по нормали относительно направления прихода зондирующего сигнала гидролокатора Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М.: Сов. радио, 1974).
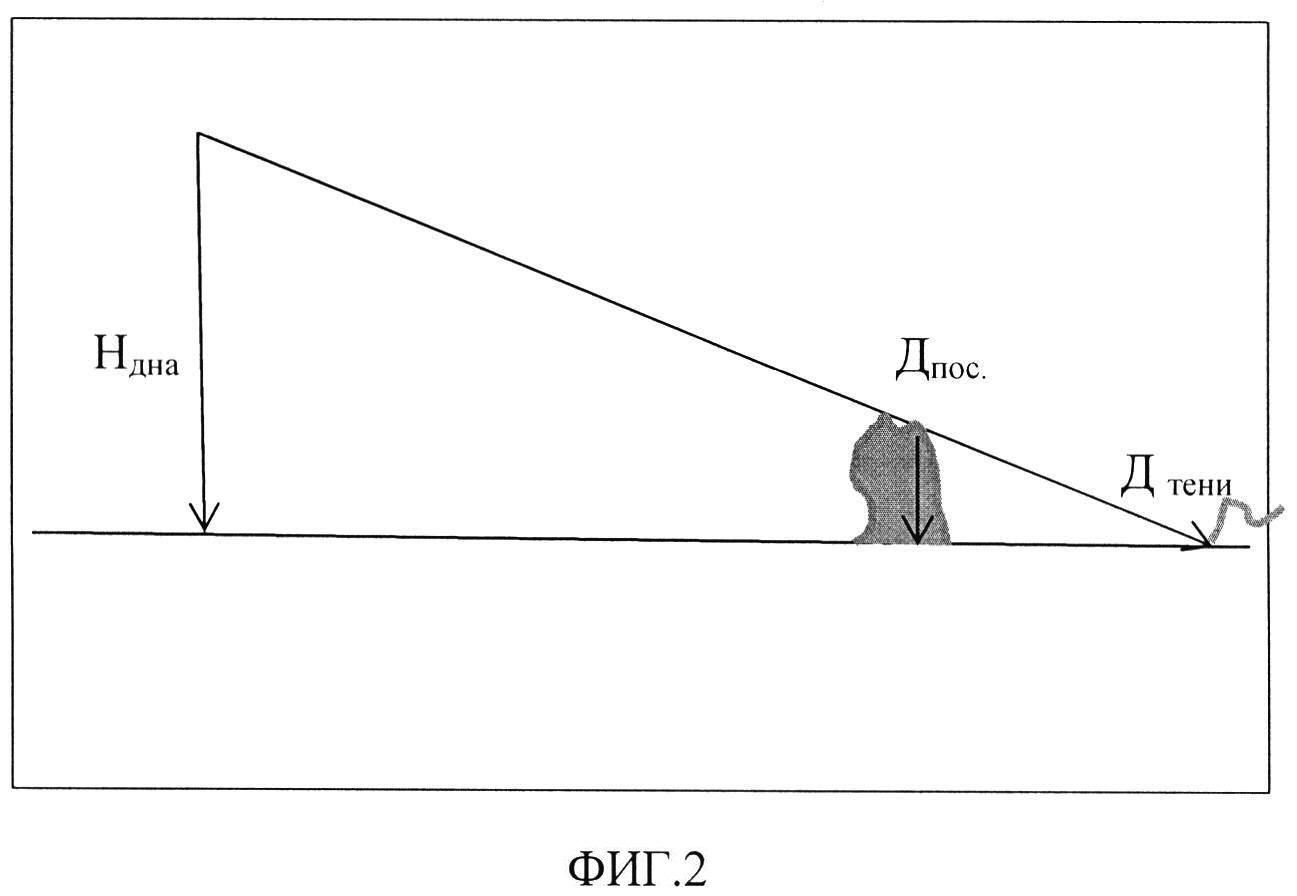
Поскольку объект находится в дальнем поле и имеет ограниченные размеры, то эхосигнал от такого объекта представляет плоскую мало искаженную волну. Форма огибающей эхосигнала будет определяться тем, насколько отдельные отражающие элементы объекта будут освещены или насколько они будут затенены. Сам объект, находящийся на дне, целиком экранирует донную поверхность за объектом, и сигнал к ней не приходит и от нее не отражается. В этом случае интенсивность эхосигнала после отражения от объекта резко уменьшается даже по сравнению с сигналом донной реверберации и на вход приемного устройства будет поступать сигнал, амплитуда которого определяется интенсивностью объемной реверберации и шума, поскольку донный участок будет экранироваться корпусом лежащего на дне объекта. Следовательно, на участке огибающей реализации входного процесса образуется своеобразный провал, уровень которого существенно меньше, чем эхосигнал от объекта и от уровня донной реверберации, и равен уровню объемной реверберации, действующей на момент прихода эхосигнала после отражения от объекта. Фактически этот уровень объемной реверберации будет соответствовать уровню шума на входе приемного устройства (А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Судостроение, 1983, Л., стр. 50). Существующие системы обнаружения имеют своей целью определение наличия эхосигнала от объекта по величине превышения амплитуды эхосигнала от объекта выбранного порога, который выбирается исходя из отношения сигнал/помеха. Таким образом, критерием является превышение измеренного уровня эхосигнала измеренного уровня помехи. Эхосигнал от объекта может содержать несколько отражателей, амплитуды от которых будут определяться структурой отражателя и их эквивалентным радиусом. Начало тени будет определяться началом отражения, которое расположено на максимальной высоте объекта и имеет минимальную дистанцию. Амплитуда эхосигнала от отражателя с минимальной дистанцией не всегда будет наибольшей, но этот отражатель будет формировать начало тени. Поэтому в задаче обнаружения тени имеет смысл рассматривать время начала эхосигнала, время формирования зоны тени и определение момента времени окончания зоны тени (см. фиг. 2). Для обнаружения тени возникает процедура сравнения амплитуды принятой реализации Аоб с порогом Uпор, который характеризует отсутствие отражения от объекта с одной стороны. С другой стороны должно быть наличие минимального уровня U0, который определяется уровнем объемной реверберации, значение которой может быть измерено после излучения зондирующего сигнала. Рассмотрим формирование зоны тени. Имеют место два подобных треугольника, один из которых определяется расстоянием от гидролокатора до окончания зоны тени Dтени=0,5 С tкон.т и расстоянием от гидролокатора до дна Ндна. Второй определяется дистанцией {Dтени-D0(tпос)} от объекта до окончания зоны тени и высотой объекта h. Для нахождения высоты расположения объекта над дном необходимо определить угол, под которым наблюдается объект и который формирует длину тени. Синус этого угла будет определяться как отношение дистанции до дна под гидролокатором Ндна к дистанции окончания длины тени Dтени=0,5 С tкон.т. После этого определяется расстояние от начала объекта до окончания зоны тени (Dтени-D0)=0,5 С (tкон.т-tпос) и с использованием оценки синусу угла вычисляется оценка высоты положения объекта над поверхностью дна  .
.
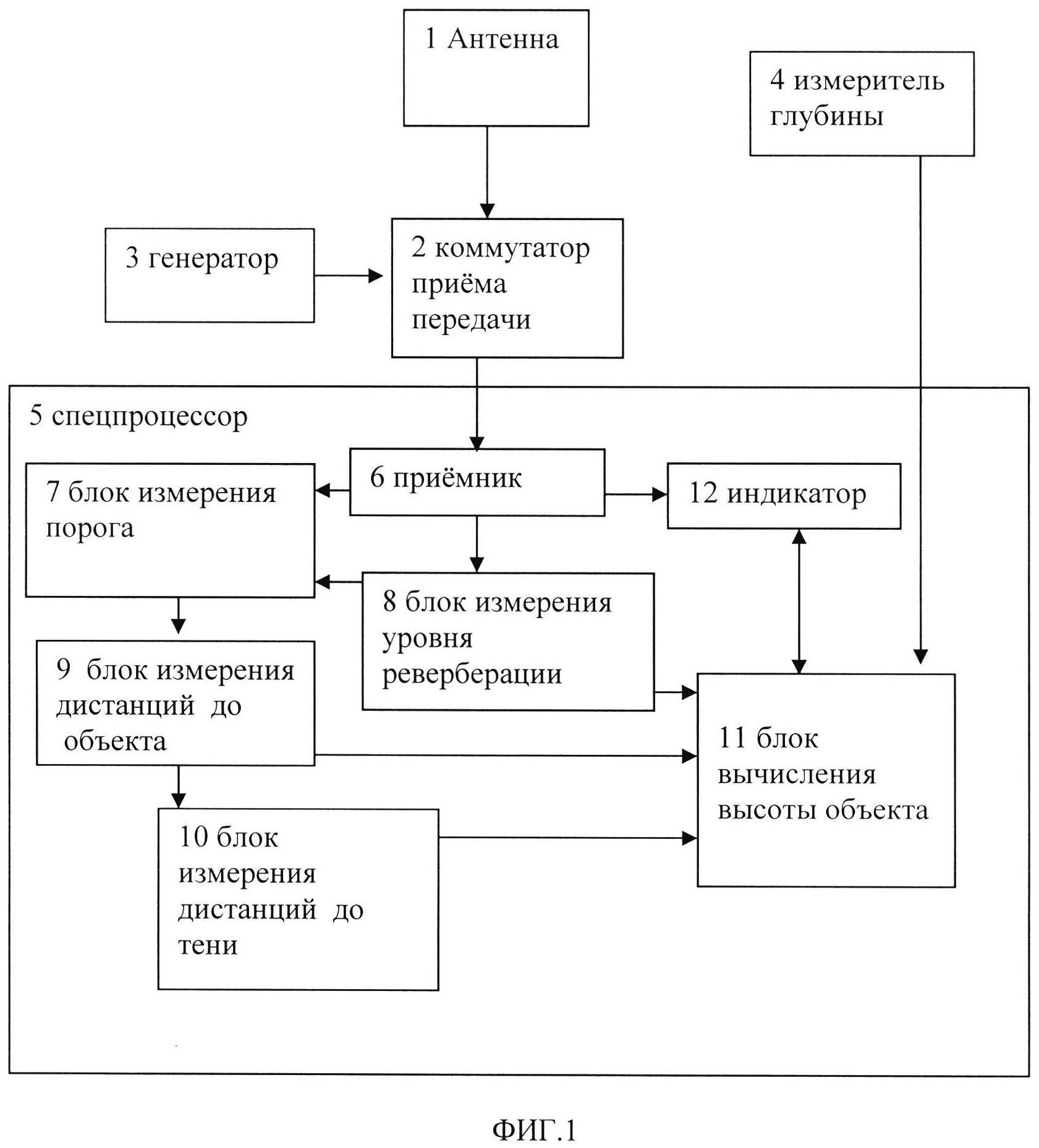
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего способ.
На фиг. 1 антенна 1 через коммутатор приема передачи 2 соединена с спецпроцессором 5, в котором через первый выход приемника 6, через первый выход блока 8 измерения уровня реверберации, через первый вход блока 11 соединена двусторонней связью с индикатором 12. Второй выход приемника 6 через первый вход блока 7 измерения порога, через первый выход блок 9 измерения дистанции до объекта, через блок 10 измерения дистанции до тени связан со вторым входом блока 10 вычисления высоты объекта. Второй выход блока 8 измерения уровня реверберации соединен со вторым входом блока измерения порога. Второй выход блока 9 измерения дистанции до объекта соединен с третьим входом блока 11 вычисления высоты объекта, четвертый вход которого соединен с измерителем глубины 4, второй вход коммутатора соединен с генератором 3, третий выход приемника 6 соединен со вторым входом индикатора 12.
С использованием предлагаемого устройства способ измерения высоты объекта над уровнем дна работает следующим образом.
Генератор 3 формирует зондирующий сигнал, который через коммутатор приема передачи поступает на антенну и излучается в водную среду. Антенна 1 принимает отраженные от объекта эхосигналы, которые через коммутатор приема передачи 2 поступают на спецпроцессор 5, в состав которого входит приемник 6. Антенна 1, генератор 3, коммутатор приема передачи 2 и приемник являются известными устройствами, которые используются в прототипе и достаточно подробно изложены в литературе (Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. Л.: Судостроение, 1983). Спецпроцессор 5 является известным устройством, который широко используется в современной электронной технике при обработке эхосигналов. Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для автоматического измерения высоты объекта над дном (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника», СПб: изд. «Наука», 2004, стр. 281).
Предлагаемый способ с помощью устройства (фиг. 1) осуществляется следующим образом. Принятая гидроакустической антенной 1 временная реализация поступает на приемник 6, где происходит оптимальная обработка принятых сигналов, которая передается на блок 7 измерения порога. Параллельно входная информация поступает в блок 8 измерения уровня объемной реверберации, значение которой также используется для выбора порога обнаружения в блоке 7. Эхосигналы, превысившие порог, передаются в блок 9 для измерения дистанции до объекта, моменты времени формирования эхосигнала до объекта используются для измерения дистанций до зоны тени, которая определяется по реализации, передающейся через блоки 7 и 9 в блок 10, где по выбранным признакам время окончания зоны тени. Дистанция до начала объекта и дистанция до конечной границы зоны тени поступают в блок 11 вычисления высоты объекта. Сюда же поступает из блока 8 уровень объемной реверберации, уровень порога, а из измерителя глубины 4 оценка глубины от антенны гидролокатора до дна. В качестве измерителя 4 глубины до дна может быть использован, например, многолучевой эхолот, который представляет собой отдельный специальный гидролокатор, рассмотренный в книге А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». СПб, 2009, с 122. Эхолот содержит излучающую и приемную антенны, аппаратуру предварительной обработки, основной процессор системы, блок вторичной обработки и измеритель скорости звука. Точность измерения глубины до дна у современных эхолотов может составлять несколько сантиметров в зависимости от глубины до дна и точности оценки скорости звука. В блоке 11 происходит вычисление высоты расположения объекта на дном. Вся входная информация с выхода приемника поступает на индикатор 12, куда выводится и полученная оценка высоты объекта над дном. Блок 11 и блок 12 соединены двусторонней связью, которая позволяет контролировать правильность измерения высоты объекта оператором и при необходимости проводить корректировку. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб. «БХВ - Петербург», 2011).
Таким образом, предложенный способ позволяет по одной посылке определить высоту объекта локации над дном. Это позволяет считать заявленный технический результат достигнутым.
Гидроакустический способ определения пространственных характеристик объекта, содержащий излучение зондирующего сигнала в момент времени t, приема эхосигнала t, определяется дистанция D до объекта по величине временной задержки и известной скорости распространения звука С, отличающийся тем, что после излучения измеряют уровень объемной реверберации U, определяют порог обнаружения U, измеряют t время начала эхосигнала, при котором впервые амплитуда эхосигнала А превысила порог А>U, и определяют дистанцию D=0,5С t, измеряют момент времени последней амплитуды эхосигнала t, при котором минимальная амплитуда эхосигнала от объекта А>U, определяют момент времени начала тени t, при котором выполняется условие U≥А и t>t, определяют момент времени окончания тени t, при котором U>А≥U, определяют дистанцию до момента окончания тени D=0,5 С t, определяют глубину от гидролокатора до дна H, а высоту объекта определяют по формуле .
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

