Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
В СЭП осуществляют непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства (ЗУ) обеспечивают заряд АБ, а стабилизатор напряжения (СН) и разрядные устройства (РУ) обеспечивают питание бортовой аппаратуры (БА). В зависимости от степени заряженности АБ производят запрет или разрешение работы ЗУ и РУ.
Ориентацию БФ на Солнце осуществляют двумя способами, а именно:
1) путем изменения углового положения КА вокруг центра масс, обеспечивая при этом условие cosα=1=const, где α - угол между перпендикуляром к поверхности БФ и направлением на Солнце;
2) путем обеспечения ориентации и движения КА в орбитальной системе координат (продольная ось КА постоянно направлена к центру Земли) и выполнения перекладок панелей солнечных батарей (ПСБ) по заданной программе.
В последнем случае КА оснащают приводами, используемыми для выполнения перекладок ПСБ (изменения положения ПСБ относительно координатных осей КА) или только по крену, или по крену и тангажу. В данном случае углы крена и тангажа соответствуют схеме полета, когда ПСБ расположены вдоль вектора движения КА.
В силу различных причин, в том числе из-за прецессии угла β между плоскостью орбиты и направлением на Солнце, генерируемая БФ средняя электрическая мощность (за сутки или за один виток орбиты КА) постоянно изменяется. При этом увеличивается (уменьшается) длительность светового участка орбиты и амплитуда тока БФ, а зависимость освещенности (тока) БФ от времени на световом участке орбиты описывается по закону, близкому к синусоидальному. Минимально необходимая для питания БА средняя электрическая мощность БФ на практике генерируется за счет ориентации и движения КА в орбитальной системе координат и выполнения, при необходимости, перекладок ПСБ по крену или тангажу. Выбирая оптимальное положение БФ в зависимости от угла β, можно обеспечить условие, когда вырабатываемая средняя мощность БФ будет наивысшей по сравнению с мощностями для других возможных положений БФ. Параметры БФ, а именно площадь ПСБ, масса, срок эксплуатации и т.д. выбираются для расчетного случая, β=0, как наиболее тяжелого режима функционирования СЭП с точки зрения соблюдения энергобаланса.
Известен способ управления автономной системой электропитания КА (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г., аналог), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; задании напряжения рабочей точки вольт-амперной характеристики батареи фотоэлектрической, контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности (или напряжения) данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности (напряжения) данной аккумуляторной батареи.
Данный способ управления автономной системой электропитания КА является классическим и применяется при штатной эксплуатации СЭП в составе КА независимо от способа ориентации БФ на Солнце. Кроме того, для предотвращения выхода из строя АБ при заряде в аналоге предусмотрен режим токоограничения, когда максимальный ток заряда не может превышать заданного порога. Следовательно, нагрузка, состоящая из БА и аккумуляторных батарей, находящихся в режиме заряда, является переменной и зависимой от величины тока заряда АБ, при этом в режиме токоограничения всех АБ нагрузка достигает максимальной величины.
Для СЭП с последовательно-параллельной структурной схемой подключения источников питания, когда БА включается последовательно БФ (через стабилизатор напряжения) и параллельно АБ (через разрядные устройства), задача максимального отбора мощности БФ является наиболее актуальной. Из-за наличия деградации фотоэлектрических преобразователей (ФЭП) в процессе их длительной эксплуатации рабочая точка вольт-амперной характеристики (ВАХ) БФ, используемой для штатной работы СЭП, и точка ВАХ, в которой выделяется максимальная мощность (оптимальная точка ВАХ) БФ, как правило, разнесены друг от друга на (10÷15) В (например, рабочая точка ВАХ КА "Ресурс-ДК" (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г.) соответствует напряжению 31 В, а оптимальная точка ВАХ - 45 В, при этом максимальная величина тока в этих точках ВАХ составляет соответственно 155 А и 150 А). Следовательно, относительно большая часть мощности БФ в процессе штатной эксплуатации СЭП не используется по назначению.
В аналоге, в том числе и на КА "Ресурс-ДК", для максимального отбора мощности БФ применяют экстремальный регулятор мощности (ЭРМ) БФ, который работает в автоматическом режиме. При включении ЭРМ происходит пошаговое определение величины фактической максимальной мощности БФ (оптимальной точки ВАХ), зависящей от ее текущей освещенности и температуры, а затем поддержание этого режима работы СЭП. Как правило, включение автоматического ЭРМ позволяет увеличить отбираемую нагрузкой мощность БФ на (20÷30) %. Однако функционирование ЭРМ возможно только тогда, когда напряжение БФ соответствует оптимальному значению, при этом мощность БФ должна полностью использоваться для питания нагрузки. В противном случае ЭР, в силу своего принципа действия, не может функционировать, а работа СЭП происходит на спадающей части ВАХ БФ, где напряжение БФ превышает оптимальное напряжение, а потребляемый ток зависит от потребляемой нагрузкой мощности.
Недостатком аналога является то, что максимальная мощность БФ (Роптт.) при включенном ЭРМ может быть использована только при наличии соответствующей электрической нагрузки, причем мощность БФ (РБФ) в диапазоне от максимальной мощности БФ до мощности, соответствующей мощности в рабочей точке БФ (Рраб.т.), не может быть использована в принципе. Этот недостаток остро проявляется в случае использования способа постоянной ориентации БФ на Солнце под прямым углом. Таким образом, отбор мощности БФ возможен только в диапазоне изменения РБФ от 0 до Рраб.т., а при включенном ЭРМ и наличии нагрузки, соответственно РБФ=Роптт.
Известен способ управления автономной системой электропитания КА (Патент РФ на изобретение №2168828, кл. Н02J 7/36, опубл. 10.06.2001, бюл. №16, аналог), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами при аварийном разряде аккумуляторных батарей в случае потери ориентации БФ на Солнце; снятии запрета работы всех разрядных устройств и возобновлении управления разрядными устройствами по сигналам об уровне заряженности при заряде аккумуляторных батарей до некоторого значения емкости.
Данный способ позволяет сохранять работоспособность СЭП при нештатных или аварийных ситуациях на КА. Однако он не позволяет решить задачу максимального отбора мощности БФ при повышении мощности потребления нагрузки.
Известен способ управления автономной системой электропитания космического аппарата (патент РФ на изобретение №2467449, кл. Н02J 7/36, опубл. 20.11.2012, бюл. №32, прототип), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае, если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой нагрузки от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей или по внешней разовой команде.
Этот способ также не позволяет соблюдать энергобаланс при необходимости повышения мощности потребления нагрузки.
Задачей предлагаемого изобретения является создание способа управления автономной системой электропитания КА, позволяющего сдерживать процесс возникновения аварийной ситуации из-за нарушения энергобаланса путем создания и поддержания режима максимального отбора мощности БФ и парировать аварийную ситуацию в случае ее возникновения.
Указанная задача решается тем, что в способе управления автономной системой электропитания космического аппарата (КА), содержащей фотоэлектрическую батарею (БФ) и n аккумуляторных батарей (АБ), стабилизатор напряжения, включенный между БФ и нагрузкой, и по n зарядных и разрядных устройств, заключающемся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания (СЭП); введении запрета на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снятии этого запрета при снижении уровня заряженности данной АБ; введении запрета на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снятии этого запрета при повышении уровня заряженности данной АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких m(m≤n) АБ до минимального уровня заряженности, запрещении работы всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; произведении сброса запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности автоматически или по внешней разовой команде; панели БФ ориентируют при функционировании СЭП в режиме питания бортовой аппаратуры и заряда АБ на Солнце под углом 90°; величину номинального входного напряжения, соответствующего напряжению в рабочей точке вольт-амперной характеристики БФ. выбирают, исходя из величины ее номинальной мощности, необходимой для обеспечения в штатном режиме функционирования СЭП электроэнергией для питания бортовой аппаратуры и заряда всех АБ; напряжение в рабочей точке ВАХ БФ, отличное от номинального значения; устанавливают и поддерживают при необходимости с помощью экстремального регулятора мощности БФ; изменение напряжения в рабочей точке ВАХ БФ осуществляют дискретно по заранее заданным пороговым значениям входного напряжения, соответствующим различным уровням отбираемой от БФ мощности, при этом перевод от одного порогового значения входного напряжения на другое обеспечивают с наземного комплекса управления по разовым командам, а отбор требуемой для питания бортовой аппаратуры и заряда всех АБ мощности БФ во всем диапазоне изменения порогового значения входного напряжения производят за счет выбора оптимального соотношения между значением тока заряда АБ и количеством (n) АБ, используемых в СЭП КА, причем ток заряда (n-1) АБ при отключенной от заряда одной АБ выбирают равным или не превышающим максимального допустимого значения; электрические характеристики БФ и экстремального регулятора мощности проектируют с учетом выполнения необходимого и достаточного условия
Uвых.<Uвх.ном.<Uопт.,
где Uвых. - выходное напряжение СЭП;
Uвх.ном. - номинальное входное напряжение в рабочей точке ВАХ БФ при отключенном экстремальном регуляторе мощности БФ;
Uопт. - входное напряжение, соответствующее максимальной (оптимальной) мощности БФ.
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на фиг. 1, где обозначено:
1 - батарея фотоэлектрическая;
2 - стабилизатор напряжения (СН) с ЭРМ БФ;
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n - аккумуляторные батареи;
61…6n - устройства контроля степени заряженности АБ (УКЗАБ);
ОС - вход обратной связи;
3 - вход запрета работы;
7 - бортовая аппаратура (нагрузка СЭП);
8 - датчик пороговый минимального напряжения;
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n - R-S триггеры;
15 - логический элемент И;
161…16n, 171…17n - логические элементы ИЛИ.
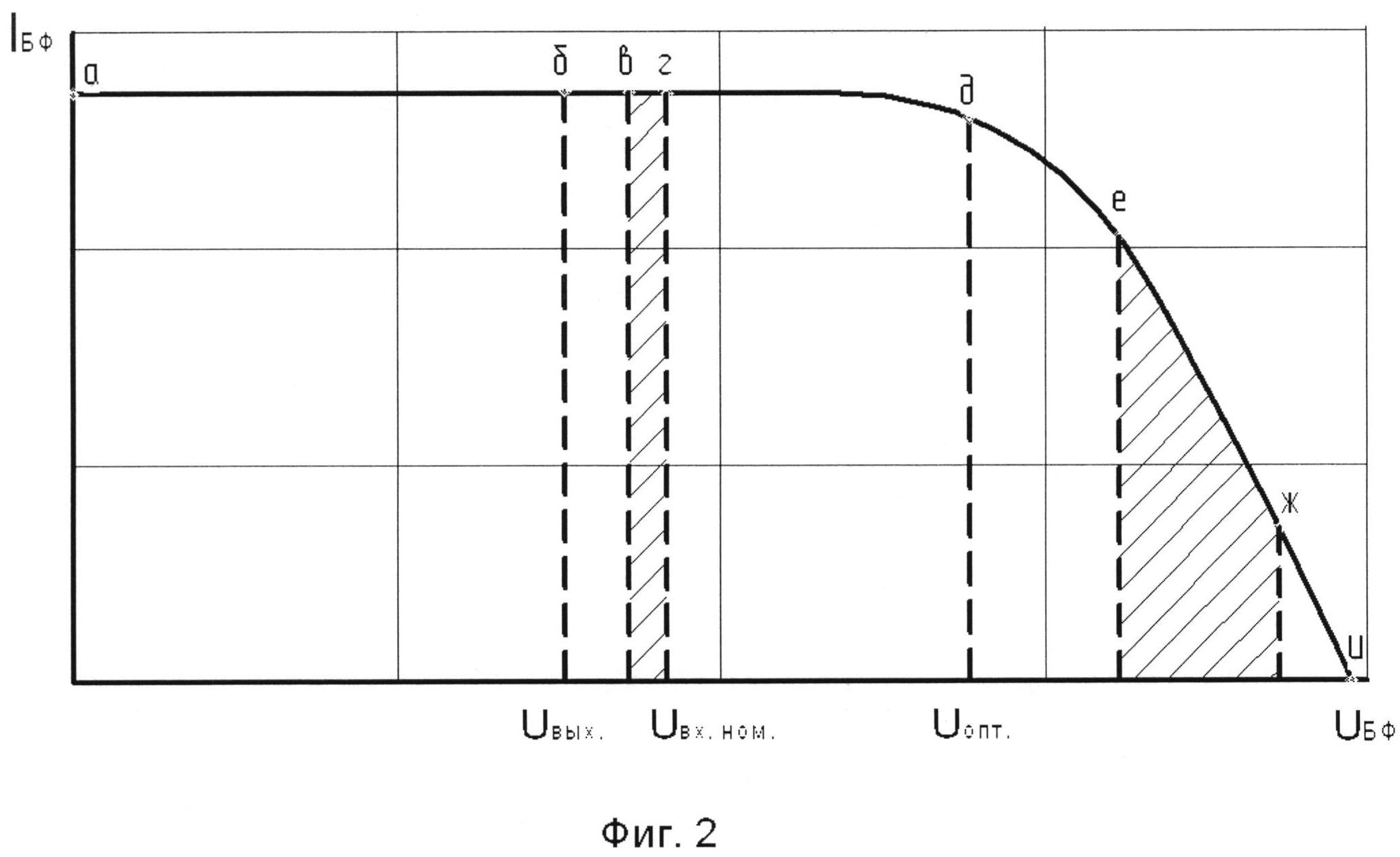
Экстремальный регулятор мощности (ЭРМ) БФ 1 входит в состав стабилизатора напряжения 2 и отдельно на фиг. 1 не показан. В силу своего принципа работы ЭРМ по разовой команде может дискретно задавать пороговое входное напряжение, отличное от номинального входного напряжения, и стабильно поддерживать это напряжение при изменении потребления БА 7 за счет соответствующего изменения величины тока заряда АБ (51…5n), сохраняя при этом значение тока БФ 1 постоянным. При недостаточном потреблении БА 7 вырабатываемой БФ 1 мощности ЭРМ автоматически перестает функционировать, а рабочая точка ВАХ БФ 1 автоматически переходит на ее спадающую часть (см. фиг. 2), где вырабатываемая мощность БФ 1 полностью расходуется на питание бортовой аппаратуры 7 и заряд тех АБ (51…5n), которые находятся в это время в режиме заряда.
На фиг. 2 показана типовая вольт-амперная характеристика (зависимость входного напряжения (UБФ) от тока (IБФ) БФ) батареи фотоэлектрической 1, используемой в СЭП КА. На ВАХ БФ 1 показаны следующие характерные точки: режим короткого замыкания БФ 1, когда напряжение БФ 1 равно нулю (точка а), напряжение БФ 1, равное выходному напряжению СЭП (точка б), рабочее напряжение БФ 1, соответствующее минимальной отбираемой СН 2 мощности БФ 1 (точка в), номинальное напряжение в рабочей точке БФ 1 (точка г), оптимальное (экстремальное) напряжение БФ 1, соответствующее ее максимальной мощности (точка д), напряжение БФ 1 на спадающей части ВАХ, соответствующее мощности БФ 1, равной номинальной мощности в рабочей точке ВАХ БФ 1 (точка е), напряжение БФ 1 на спадающей части ВАХ, соответствующее минимальной мощности потребления БА 7 (точка ж), режим холостого хода БФ 1 или напряжение БФ 1 при нулевом значении тока БФ 1 (точка и). Заштрихованные участки ВАХ соответствуют рабочим участкам, где происходит функционирование БФ 1 без применения экстремального регулятора мощности.
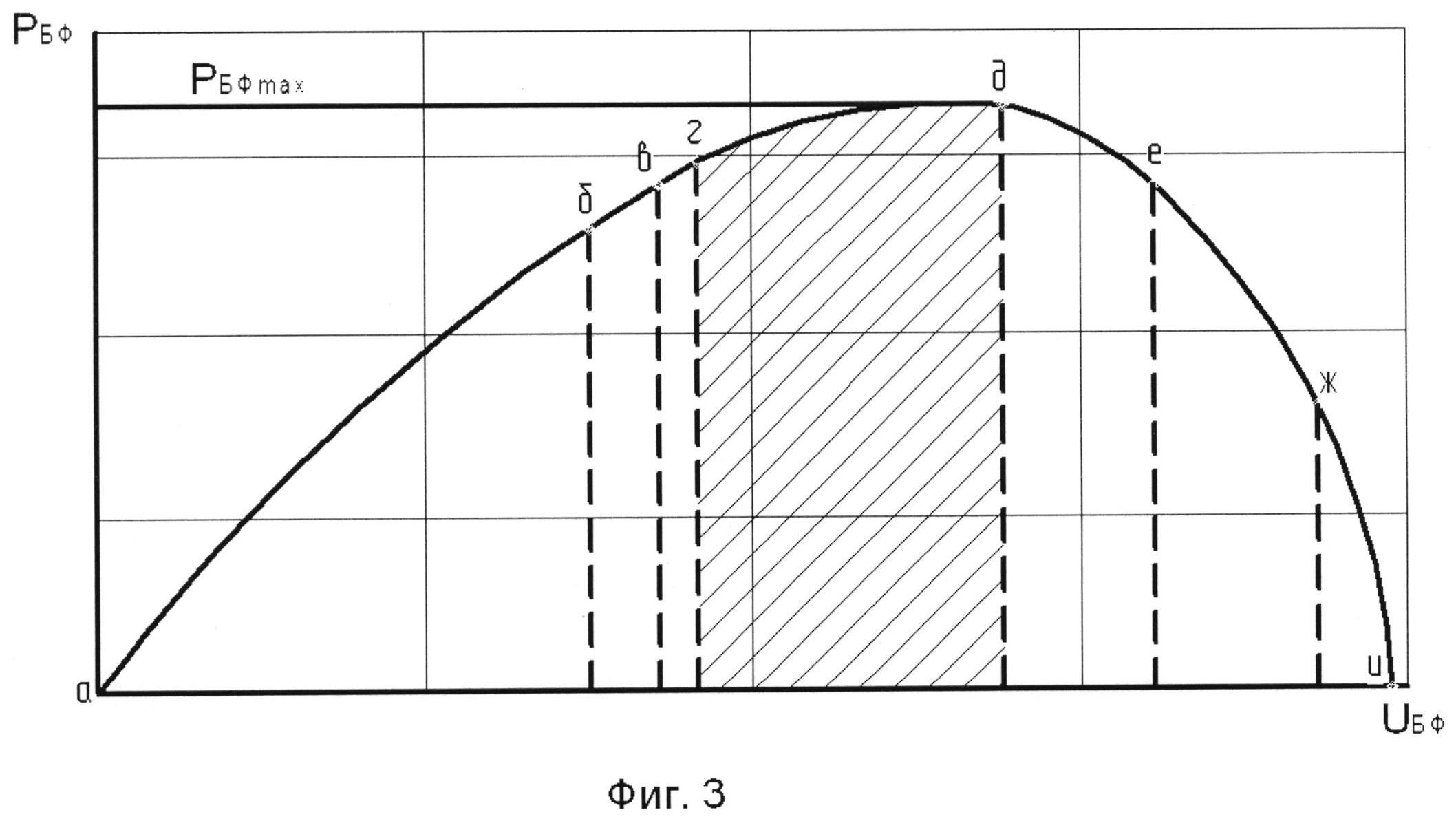
На фиг. 3 показан график зависимости генерируемой мощности БФ 1 от ее напряжения. Данная зависимость имеет нулевое значение мощности БФ 1 в режимах короткого замыкания (точка а) и холостого хода (точка и), а также максимальное значение мощности БФ 1 (точка д). Заштрихованный участок данного графика соответствует участку, где происходит фактическое функционирование БФ 1 со включенным экстремальным регулятором мощности БФ 1.
Способ управления автономной системой электропитания космического аппарата осуществляют следующим образом (см. фиг. 1). СЭП производится непрерывное управление стабилизатором напряжения с ЭРМ БФ 1, зарядными и разрядными устройствами, а также панелями солнечных батарей в зависимости от освещенности БФ 1, входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства обеспечивают заряд АБ (51…5n), а СН 2 и РУ (41…4n) обеспечивают питание БА 7. Цепи непрерывного управления (обратной связи - ОС) ЗУ (31…3n) подключены к шине БФ 1, а цепи непрерывного управления (ОС) СН 2 и РУ (41…4n) подключены к выходной шине СЭП (на вход БА 7).
В зависимости от степени заряженности АБ производится запрет или разрешение работы ЗУ (31…3n) и РУ (41…4n). При достижении максимальной степени заряженности конкретной АБ (51…5n) сигнал с выхода "Запрет ЗУ" ее устройства контроля степени заряженности АБ (61…6n) на фиг. 1) АБ (51…5n) с помощью R-S триггера (121…12n) запрещает работу ее ЗУ (31…3n). После разряда АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение ЗУ" УКЗАБ.
При достижении минимального уровня заряженности конкретной АБ (51…5n) сигнал с выхода "Запрет РУ" ее УКЗАБ (61…6n), проходя через R-S триггер (141…14n) и логический элемент ИЛИ (171…17n), поступает на вход запрета работы соответствующего РУ (41…4n). Эта АБ (51…5n) переводится в режим хранения. После заряда данной АБ (515n) до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение РУ" УКЗАБ (61…6n) (логические элементы ИЛИ (161…16n), R-S триггеры (141…14n), логические элементы ИЛИ 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭП. Сигналы с выходов "Запрет РУ" всех УКЗБ (61…6n) поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И).
При аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки («АН»), который выдается в бортовой комплекс управления для отключения части БА 7. Этот сигнал запоминается на R-S триггере 11. Запоминание снимается по внешней разовой команде (РК). При отключении бортовым комплексом управления части БА 7 снижается скорость расходования энергии АБ (51…5n). Остается подключенной часть бортовой аппаратуры 7 - приборы систем терморегулирования, телеметрии и других необходимых систем. Эти приборы обеспечивают температурные режимы и контроль параметров БА 7. Появляется возможность более длительное время питать нагрузку и продолжать работы по выводу КА из нештатной ситуации. Таким образом, обеспечивается возможность использования средств бортового комплекса управления для адаптивного изменения схемы питания БА 7 в зависимости от текущего состояния энергетических возможностей СЭП.
При аварийном разряде всех n работающих АБ (51…5n) до минимального уровня заряженности на выходе логического элемента 10 появляется сигнал, который, проходя через логические элементы ИЛИ (161…16n), R-S триггеры (141…14n), логические элементы ИЛИ (171…17n), снимает запрет на работу всех разрядных устройств. Далее, если аварийная ситуация продолжается, происходит синхронный разряд на оставшуюся часть нагрузки всех АБ (51…5n). Имеющаяся емкость АБ используется полностью.
При дальнейшем аварийном разряде выходное напряжение системы снижается до заданного порогового значения, срабатывает датчик пороговый минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала «АН» на R-S триггере 11, то его сигнал, пройдя через логический элемент И 15 и R-S триггеры (131…13n) и логические элементы ИЛИ (171…17), запрещает работу всех разрядных устройств и логическим уровнем на входах элементов ИЛИ (171…17n) блокирует прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ (61…6n). Запоминание управляющего сигнала «АН» обеспечивает защиту от обесточивания БА 7 при ложном срабатывании датчика порогового минимального напряжения 8, или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ 1 и аварийным разрядом АБ (51…5n).
После восстановления ориентации БФ 1 на Солнце производят питание оставшейся включенной части БА 7 от БФ 1 через стабилизатор напряжения 2. Напряжение на выходе СЭП, обеспечиваемое СН 2, определяется соотношением мощности БА 7, подключенной к выходным шинам СЭП, и мощности, генерируемой БФ 1 и определяемой степенью ее освещенности. Напряжение БФ 1 и, следовательно, напряжение БА 7 может произвольно меняться в течение неопределенного времени, до полного восстановления ориентации, в пределах от 0 до номинального значения. Включенные приборы, естественно, при этом должны сохранять свою работоспособность. Избыток мощности БФ 1 идет на заряд АБ (51…5n).
Поскольку цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ 1, а цепи непрерывного управления (ОС) СН 2 подключены к выходной шине СЭП, в первую очередь будет обеспечиваться питание БА 7, то есть включенные приборы системы терморегулирования, систем телеметрии и других необходимых систем, которые обеспечат необходимые температурные режимы зарядных устройств и аккумуляторных батарей, а также контроль параметров. При нарушении ориентации БФ 1 на Солнце или уходе КА в тень питание всей БА 7 и заряд АБ (51…5n) прекращается. Разряд АБ (51…5n) не производится, так как сигнал «Запрет заряда» не снят.
При заряде какой-либо из аккумуляторных батарей (51…5n) до некоторого значения емкости сигнал с выхода УКЗАБ (61…6n) «АБ заряжена», пройдя через R-S триггер (131…13n) и логический элемент ИЛИ (171…17n), снимает запрет на работу своего разрядного устройства и блокировку прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ (61…6n). СЭП переходит в штатный режим работы после заряда всех АБ (51…5n) или по РК.
Предлагаемый способ управления системой электропитания КА позволит максимально использовать запасенную емкость АБ (51…5n) и обеспечить питание бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также не допустить необратимого разряда АБ (51…5n) в случае нарушения энергобаланса.
Сдерживание процесса возникновения аварийной ситуации из-за нарушения энергобаланса при повышении потребления БА 7 достигают путем использования ЭРМ БФ 1 оригинальной конструкции, позволяющей управлять режимом функционирования БФ 1, устанавливая различные пороговые значения входного напряжения в рабочей точке БФ 1.
Таким образом, используя экстремальный регулятор мощности БФ 1, устанавливают и поддерживают при необходимости напряжение в рабочей точке ВАХ БФ 1, отличное от номинального значения. Изменение напряжения в рабочей точке ВАХ БФ 1 осуществляют дискретно по заранее заданным пороговым значениям входного напряжения, при этом перевод от одного порогового значения входного напряжения на другое обеспечивают с наземного комплекса управления по разовым командам, Диапазон изменения напряжения порогового значения входного напряжения, отличное от номинальной величины напряжения в рабочей точке, соответствует диапазону изменения напряжения ВАХ от точки г до точки д (фиг. 2).
Поскольку на световом участке орбиты КА батарею фотоэлектрическую 1 ориентируют на Солнце перпендикулярно (за исключением случаев, когда КА выполняет целевую задачу, например, дистанционное зондирование Земли), то при переходе на другое пороговое значение входного напряжения отбираемая БФ 1 мощность увеличивается (фиг. 3), так как при этом величина тока БФ 1 уменьшается незначительно, а напряжение БФ 1 увеличивается на 5-35%. При повышении потребления БА 7 поддержание заданного напряжения в другой рабочей точке БФ 1 осуществляют за счет принудительного уменьшения тока заряда всех АБ (51…5n), таким образом, чтобы ток БФ 1 оставался неизменным. В случае неизменного потребления БА 7 поддержание заданного напряжения в другой рабочей точке БФ 1 осуществляют за счет соответствующего принудительного увеличения тока заряда всех АБ (51…5n).
Для того чтобы осуществить полный отбор мощности, равной мощности БФ 1 в новой рабочей точке (между точками ВАХ БФ г и д), производят выбор оптимального соотношения между значением тока заряда АБ и количеством (n) АБ, используемых в СЭП КА. Ток заряда каждой АБ в случае функционирования всех АБ (51…5n) в режиме заряда должен быть меньше максимального допустимого заряда на заданную величину. Это требование обеспечивают тем, что ток заряда каждой из (n-1) АБ при отключенной от заряда одной АБ выбирают равным или не превышающим максимального допустимого значения тока заряда. Электрические характеристики БФ 1 и ЭРМ проектируют с учетом выполнения необходимого и достаточного условия
Uвых.<Uвх.ном.<Uопт.,
где Uвых. - выходное напряжение СЭП;
Uвх.ном. - номинальное входное напряжение в рабочей точке ВАХ при отключенном ЭРМ;
Uопт. - входное напряжение, соответствующее максимальной (оптимальной) мощности БФ 1.
Выбор номинального входного напряжения в рабочей точке ВАХ выше выходного напряжения позволяет обеспечить устойчивую работу ЭРМ и СЭП в целом, поскольку при этом для стабилизации выходного напряжения используют только схему понижения входного напряжения.
Диапазон изменения порогового значения выходного напряжения выбирается из условия, чтобы фактическое значение тока заряда (n-1) АБ при номинальном входном напряжении в рабочей точке ВАХ, т.е. при отключенном ЭРМ, стало приблизительно равным или меньше его максимального допустимого значения. При этом, чем выше максимальное допустимое значение тока заряда АБ (51…5n) и больше количество АБ, тем шире диапазон изменения входного напряжения для штатного функционирования ЭРМ БФ 1. Однако количество АБ (51…5) и максимальное допустимое значение тока заряда должны удовлетворять и другим техническим требованиям. Так, чем больше максимальное значение токов заряда и разряда, тем меньше требуемое количество АБ, но при прочих равных условиях больше масса каждой АБ.
Выбор соответствующих параметров СЭП и использование ЭРМ БФ 1 оригинальной конструкции для изменения режима функционирования БФ 1 позволяют повышать отбираемую от БФ 1 мощность на 20÷30% по сравнению с мощностью БФ в номинальной рабочей точке ВАХ, что существенно повышает живучесть системы электропитания в частности и КА в целом, а также увеличить при необходимости производительность целевой аппаратуры, осуществить установку на КА на позднем этапе его проектирования дополнительной бортовой аппаратуры, сохраняя при этом необходимый энергобаланс. Кроме того, применение предлагаемого способа управления СЭП улучшает ее динамические характеристики.
Таким образом, применение предлагаемого способа управления автономной системой электропитания космического аппарата позволит сдерживать процесс возникновения и развития аварийной ситуации из-за нарушения энергобаланса, а в случае ее возникновения успешно парировать, сохраняя живучесть и работоспособность как СЭП в частности, так и КА в целом.
Способ управления автономной системой электропитания космического аппарата (КА), содержащей фотоэлектрическую батарею (БФ) и n аккумуляторных батарей (АБ), стабилизатор напряжения, включенный между БФ и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания (СЭП); вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности данной АБ; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких m(m≤n) АБ до минимального уровня заряженности; запрещают работу всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; производят сброс запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности автоматически или по внешней разовой команде, отличающийся тем, что панели БФ ориентируют при функционировании СЭП в режиме питания бортовой аппаратуры и заряда АБ на Солнце под углом 90°; величину номинального входного напряжения, соответствующего напряжению в рабочей точке вольт-амперной характеристики БФ, выбирают, исходя из величины ее номинальной мощности, необходимой для обеспечения в штатном режиме функционирования СЭП электроэнергией для питания бортовой аппаратуры и заряда всех АБ; напряжение в рабочей точке ВАХ БФ, отличное от номинального значения, устанавливают и поддерживают при необходимости с помощью экстремального регулятора мощности БФ, входящего в состав стабилизатора, а изменение напряжения в рабочей точке ВАХ БФ осуществляют дискретно по заранее заданным пороговым значениям входного напряжения, соответствующим различным уровням отбираемой от БФ мощности, при этом перевод от одного порогового значения входного напряжения на другое обеспечивают с наземного комплекса управления по разовым командам, а отбор требуемой для питания бортовой аппаратуры и заряда всех АБ мощности БФ во всем диапазоне изменения порогового значения входного напряжения производят за счет выбора оптимального соотношения между значением тока заряда АБ и количеством (n) АБ, используемых в СЭП КА, причем ток заряда каждой (n-1) АБ при отключенной от заряда одной АБ выбирают равным или не превышающим максимального допустимого значения; электрические характеристики БФ и экстремального регулятора мощности проектируют с учетом выполнения необходимого и достаточного условияU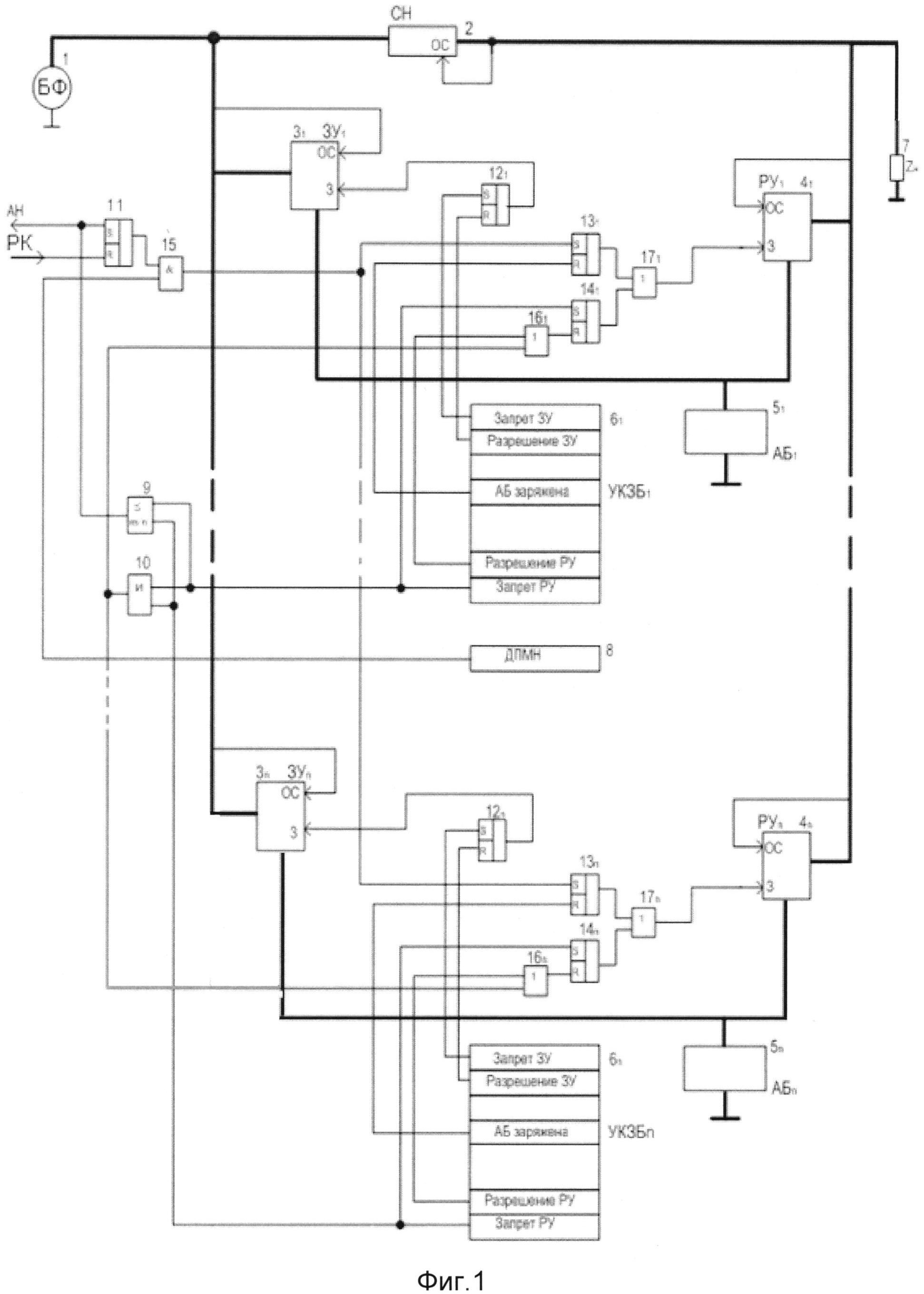
Приборная панель космического аппарата
Кассетный боеприпас
Артиллерийский осколочно-фугасный снаряд
Сопло летательного аппарата
Кран шаровой
Инструментальный усилитель с периодической коррекцией дрейфа
Тренога
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата (варианты)
Солнечная батарея
Силовой блок двигательной установки ракеты-носителя
Приборная панель космического аппарата
Кассетный боеприпас
Артиллерийский осколочно-фугасный снаряд
Сопло летательного аппарата
Кран шаровой
Инструментальный усилитель с периодической коррекцией дрейфа
Тренога
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата (варианты)
Солнечная батарея
Силовой блок двигательной установки ракеты-носителя

