Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ ОЦЕНКИ СОБСТВЕННОЙ ПОЗИЦИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству оценки собственной позиции и способу оценки собственной позиции.
Уровень техники
[0002] Примеры технологий, чтобы оценивать собственную позицию, которая является текущей позицией подвижного тела, включают в себя технологию, имеющую конфигурацию, описанную в PTL 1. В технологии, описанной в PTL 1, информация внешней среды об окружении, присутствующем в предварительно определенной области относительно подвижного тела, ограничивается, и ограниченная информация внешней среды сравнивается с картой внешней среды, сохраненной заранее, чтобы оценивать собственную позицию.
Список библиографических ссылок
Патентные документы
[0003] PTL 1: JP-A-2008-250906
Сущность изобретения
Техническая задача
[0004] В конфигурации из PTL 1, описанной выше, однако, например, в случае, в котором подвижное тело является транспортным средством, позиция в продольном направлении подвижного тела, движущегося по прямому пути, оценивается способом, в котором расстояние и направление перемещения подвижного тела определяются как функции углов поворота и угловых скоростей вращения правого и левого колес (одометрия).
Поскольку информации об окружающей обстановке на прямом пути больше, чем информации об окружающей обстановке на пути с изгибом непосредственно после въезда с прямого пути на путь с изгибом, точность оценки позиции в продольном направлении ухудшается до тех пор, пока информация об окружающей обстановке на пути с изгибом не накопится в технологиях оценки собственной позиции посредством такой одометрии. Следовательно, проблема может возникать в том, что точность оценки собственной позиции ухудшается, когда собственная позиция оценивается на пути с изгибом, на который въезд выполняется с прямого пути, в технологиях оценки собственной позиции посредством одометрии.
[0005] Настоящее изобретение было выполнено с вниманием к таким проблемам, которые описаны выше, с целью предоставить устройство оценки собственной позиции и способ оценки собственной позиции, посредством которых ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
Решение проблемы
[0006] Для того, чтобы достигать цели, упомянутой выше, согласно аспекту настоящего изобретения, обнаруживается относительная позиция цели, присутствующей около транспортного средства, и транспортного средства, и интервал перемещения транспортного средства и позиция начала изгиба пути движения, по которому транспортное средство движется, оцениваются. Кроме того, обнаруженная относительная позиция перемещается на оцененный интервал перемещения, и перемещенная относительная позиция накапливается в качестве данных о позиции цели. Дополнительно, получается картографическая информация, включающая в себя информацию о позиции цели для цели, присутствующей на карте.
Кроме того, выполняется сравнение, в котором, по меньшей мере, данные о позиции цели, присутствующей около транспортного средства, и данные о позиции цели, присутствующей между текущей позицией транспортного средства и оцененной позицией начала изгиба, из накопленных данных о позиции цели, сравниваются с информацией о позиции цели, включенной в картографическую информацию, чтобы оценивать собственную позицию транспортного средства.
Краткое описание чертежей
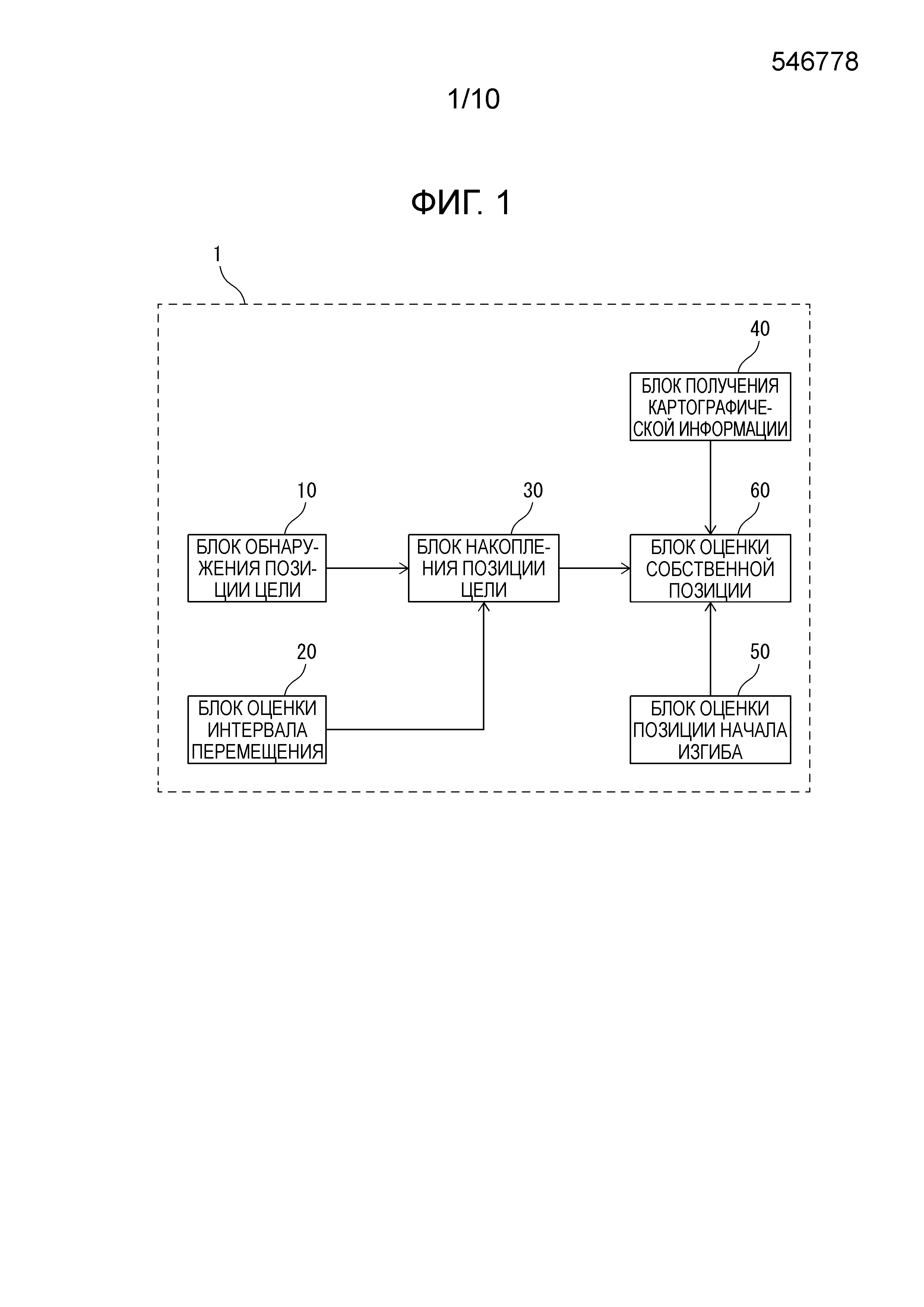
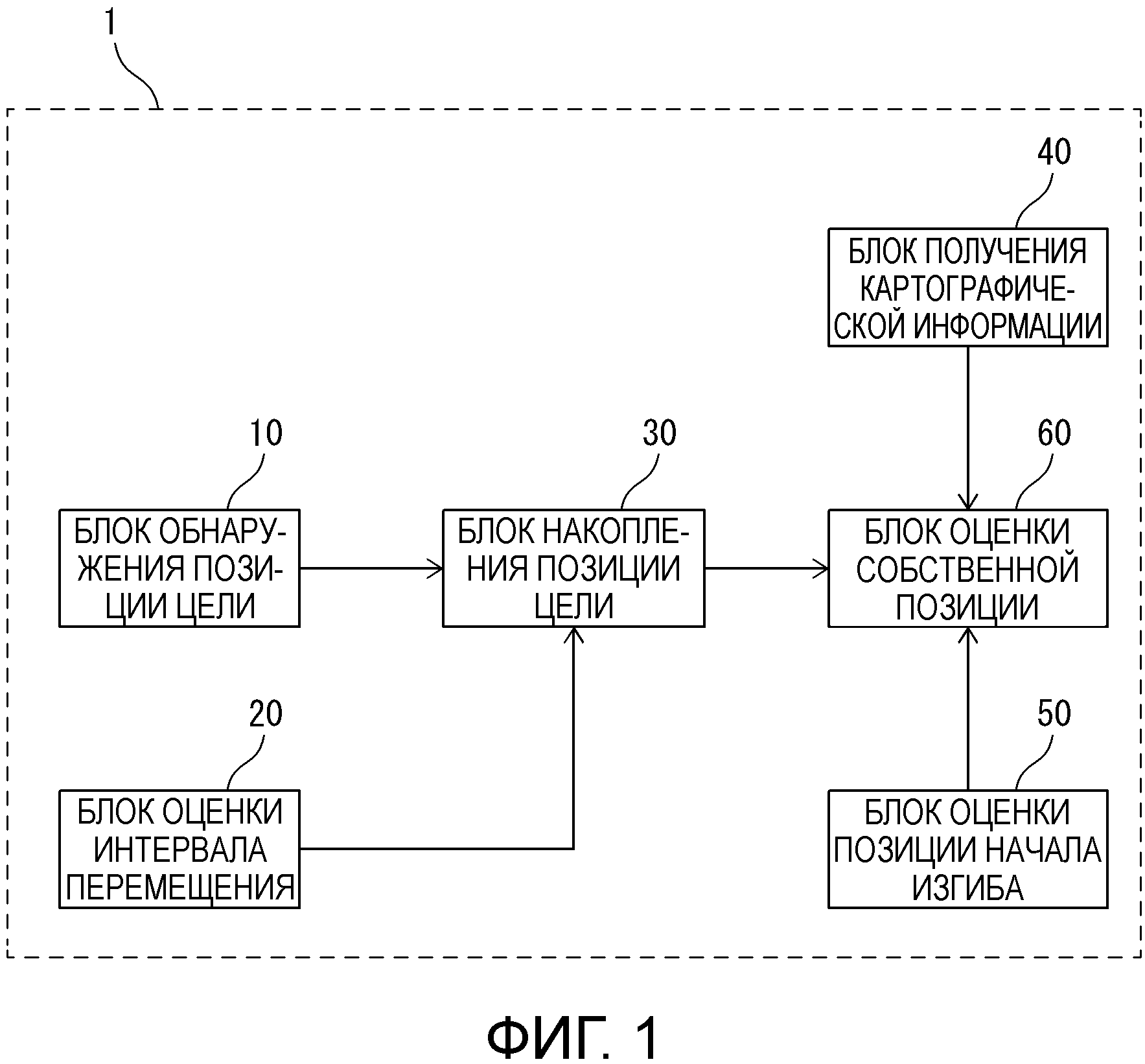
[0008] Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию устройства оценки собственной позиции согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 - это вид, иллюстрирующий конфигурацию транспортного средства, в котором установлено устройство оценки собственной позиции согласно первому варианту осуществления настоящего изобретения;
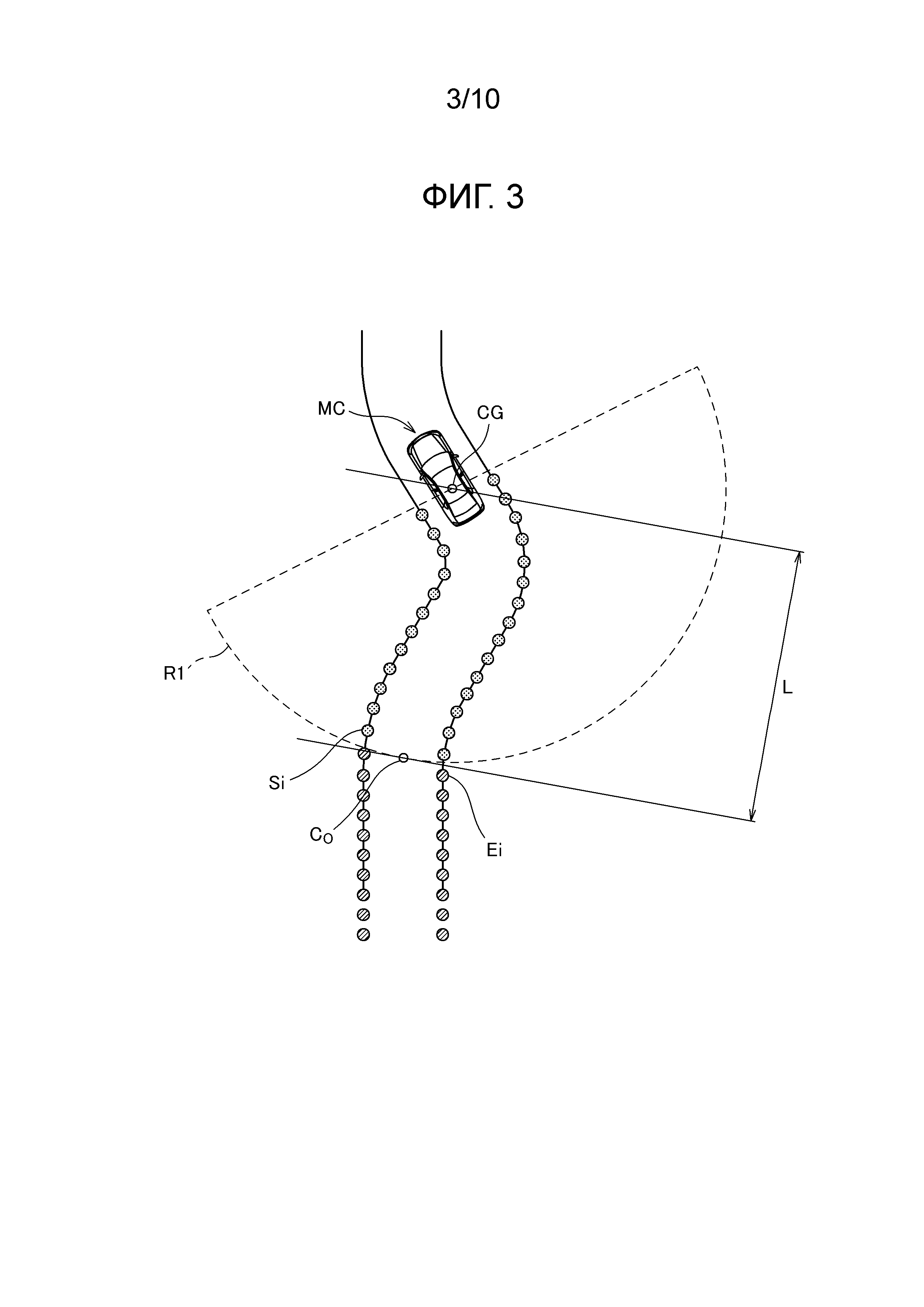
Фиг. 3 - это пояснительный чертеж позиции начала изгиба и обработки для выбора данных;
Фиг. 4 - это пояснительный чертеж обработки для выбора данных;
Фиг. 5 - это пояснительный чертеж обработки для выбора данных;
Фиг. 6 - это пояснительный чертеж обработки сравнения данных;
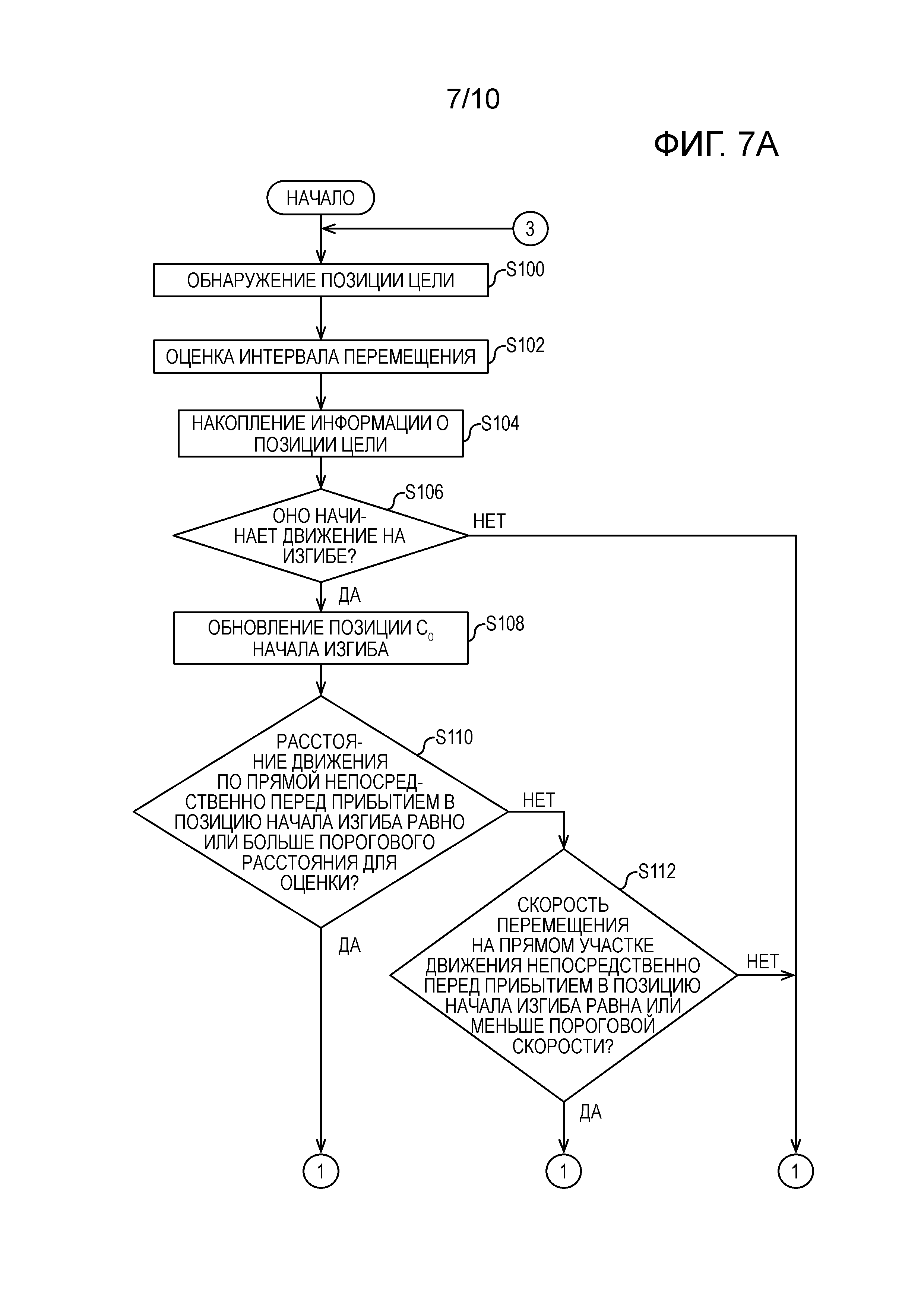
Фиг. 7A - это блок-схема последовательности операций, иллюстрирующая обработку, выполняемую посредством устройства оценки собственной позиции согласно первому варианту осуществления настоящего изобретения;
Фиг. 7B - это блок-схема последовательности операций, иллюстрирующая обработку, выполняемую посредством устройства оценки собственной позиции согласно первому варианту осуществления настоящего изобретения;
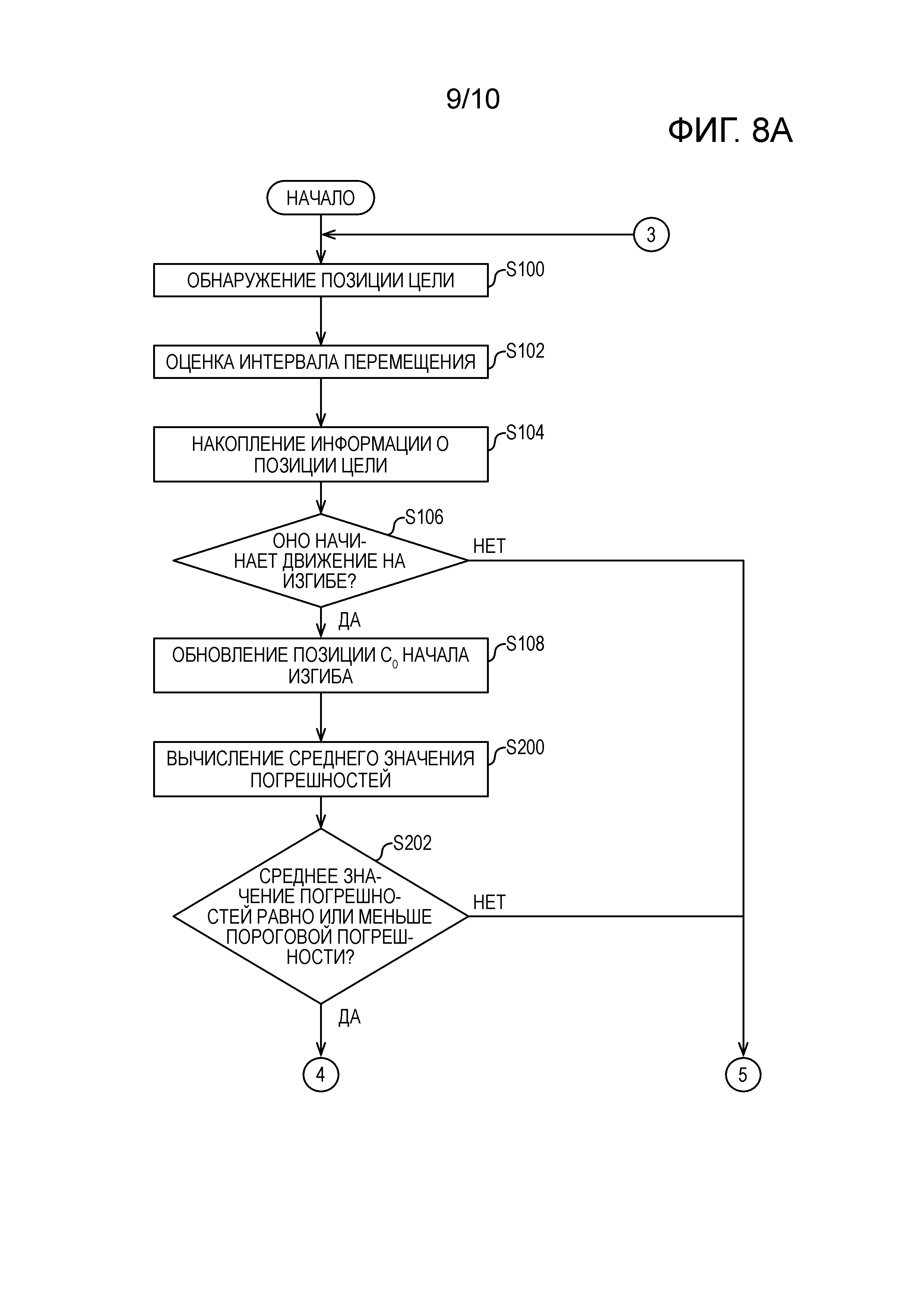
Фиг. 8A - это блок-схема последовательности операций, иллюстрирующая обработку, выполняемую посредством устройства оценки собственной позиции согласно второму варианту осуществления настоящего изобретения; и
Фиг. 8B - это блок-схема последовательности операций, иллюстрирующая обработку, выполняемую посредством устройства оценки собственной позиции согласно второму варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] В последующем подробном описании конкретные детали описываются, чтобы обеспечивать точное понимание вариантов осуществления настоящего изобретения. Однако, будет очевидно, что один или более вариантов осуществления могут быть осуществлены даже без таких конкретных деталей. Кроме того, чтобы упрощать чертежи, хорошо известные структуры и устройства могут быть иллюстрированы посредством схематичных чертежей.
[0010] (Первый вариант осуществления)
Ниже описывается первый вариант осуществления настоящего изобретения со ссылкой на чертежи.
(Конфигурация устройства оценки собственной позиции)
Конфигурация устройства 1 оценки собственной позиции согласно первому варианту осуществления будет описана со ссылкой на фиг. 1-6.
Как иллюстрировано на фиг. 1, устройство 1 оценки собственной позиции включает в себя блок 10 обнаружения позиции цели, блок 20 оценки интервала перемещения, блок 30 накопления позиции цели, блок 40 получения картографической информации, блок 50 оценки позиции начала изгиба и блок 60 оценки собственной позиции.
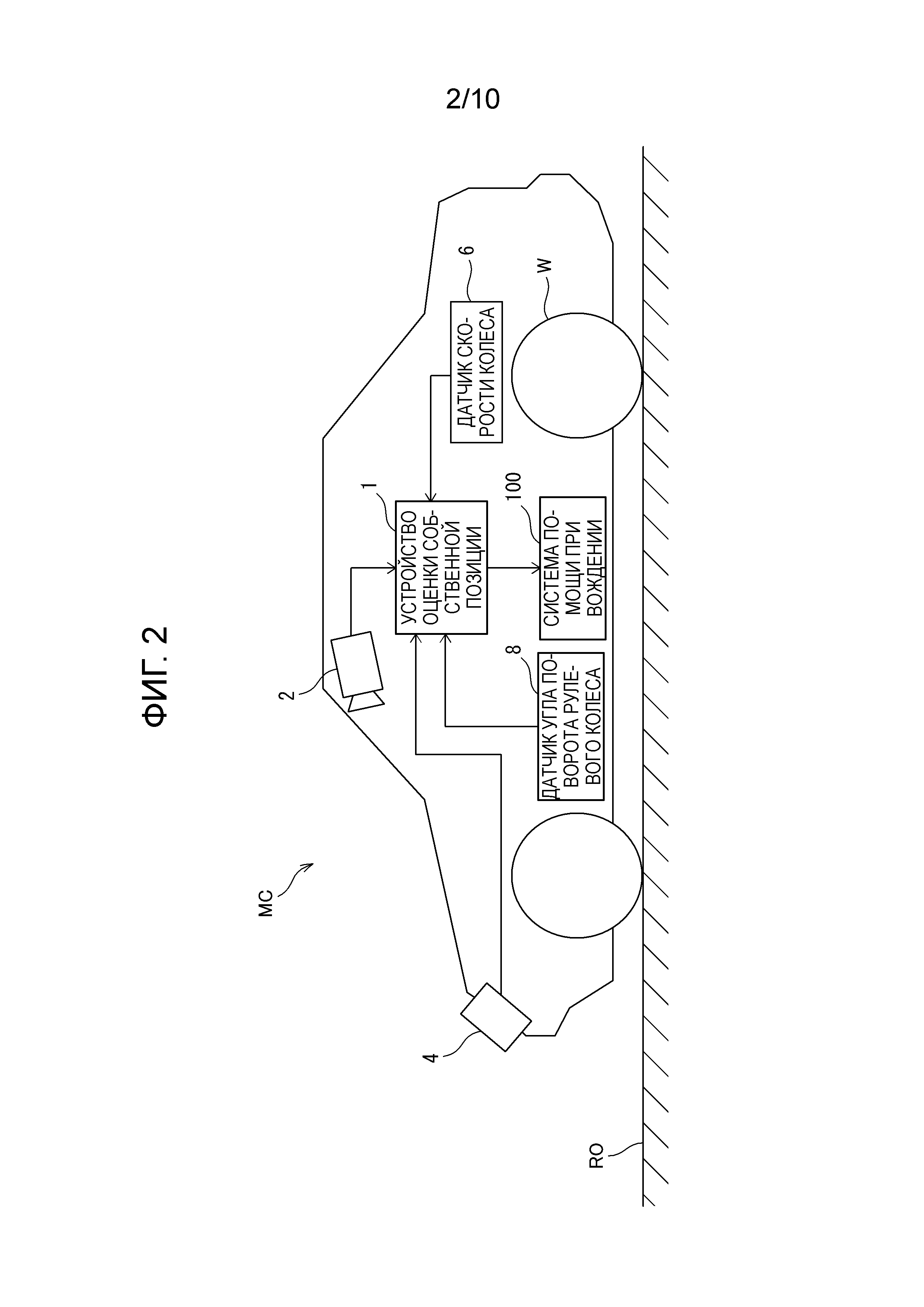
Блок 10 обнаружения позиции цели формируется, например, с помощью устройства 2 формирования изображения, такого как широкоугольная камера, а также устройства 4 измерения расстояния, такого как лазерный дальномер (LRF), как иллюстрировано на фиг. 2.
Устройство 2 формирования изображения устанавливается в транспортном средстве, включающем в себя устройство 1 оценки собственной позиции (которое может называться "транспортным средством" в последующем описании), как иллюстрировано на фиг. 2. Кроме того, устройство 2 формирования изображения устанавливается внутри транспортного средства MC и изображает область впереди транспортного средства MC.
[0011] Устройство 4 измерения расстояния присоединяется к внешней стороне транспортного средства MC и устанавливается в транспортном средстве MC, как иллюстрировано на фиг. 2. Кроме того, устройство 4 измерения расстояния излучает в область впереди транспортного средства MC электромагнитную волну и обнаруживает отраженную волну для электромагнитной волны. Позиция, в которой устройство 4 измерения расстояния присоединяется, находится поблизости, например, от капота, бампера, номерного знака, фары или бокового зеркала.
Кроме того, блок 10 обнаружения позиции цели обнаруживает окружающую обстановку транспортного средства MC, в частности, цель, присутствующую впереди транспортного средства MC, с помощью устройства 2 формирования изображения или устройства 4 измерения расстояния. Дополнительно, блок 10 обнаружения позиции цели обнаруживает относительные позиции цели и транспортного средства MC. Блок 10 обнаружения позиции цели, который обнаружил относительные позиции цели и транспортного средства MC, выводит информационный сигнал, включающий в себя обнаруженные относительные позиции (который может называться "сигналом относительной позиции" в последующем описании) в блок 30 накопления позиции цели.
[0012] Примеры цели включают в себя линию (такую как разделительная линия для полос движения) на поверхности RO дороги для движения, по которой транспортное средство MC движется, бордюрный камень на обочине дороги и ограждение.
Таким образом, блок 10 обнаружения позиции цели устанавливается в транспортном средстве MC и обнаруживает относительные позиции цели, присутствующей около транспортного средства MC, и транспортного средства MC.
Блок 20 оценки интервала перемещения формируется с помощью датчиков, таких как, например, датчик 6 скорости колеса, датчик 8 угла поворота рулевого колеса и гиродатчик (не иллюстрирован).
Датчик 6 скорости колеса устанавливается в транспортном средстве MC, как иллюстрировано на фиг. 2. Кроме того, датчик 6 скорости колеса формирует импульсы скорости колеса, число которых предварительно задается на каждый оборот колеса W, включенного в транспортное средство MC.
[0013] Датчик 8 угла поворота рулевого колеса располагается, например, в рулевой колонке (не иллюстрировано), которая вращающимся образом поддерживает рулевое колесо (не иллюстрировано), и устанавливается в транспортном средстве MC, как иллюстрировано на фиг. 2. Кроме того, датчик 8 угла поворота рулевого колеса обнаруживает текущий угол поворота рулевого колеса, который является текущим углом поворота (величиной операции руления) рулевого колеса, которое является рулевым функциональным элементом.
Гиродатчик устанавливается в транспортном средстве MC и обнаруживает поворот вокруг вертикальной оси, создаваемый в транспортном средстве MC.
Кроме того, блок 20 оценки интервала перемещения оценивает интервал ΔP перемещения транспортного средства MC с предыдущего цикла обработки с помощью параметра, обнаруженного посредством каждого датчика. Блок 20 оценки интервала перемещения, который оценил интервал ΔP перемещения транспортного средства MC, выводит информационный сигнал, включающий в себя оцененный интервал ΔP перемещения (который может называться "сигналом интервала перемещения" в последующем описании) в блок 30 накопления позиции цели.
Таким образом, блок 20 оценки интервала перемещения устанавливается в транспортном средстве MC и оценивает интервал перемещения транспортного средства MC.
[0014] Блок 30 накопления позиции цели принимает ввод сигнала относительной позиции цели, присутствующей около транспортного средства MC, от блока 10 обнаружения позиции цели и принимает ввод сигнала интервала перемещения от блока 20 оценки интервала перемещения.
Блок 30 накопления позиции цели накапливает относительную позицию цели, присутствующей около транспортного средства MC, включенную в сигнал относительной позиции, и корректирует ранее накопленную относительную позицию цели в позицию относительно текущего транспортного средства MC с помощью интервала времени, прошедшего до текущего времени, и интервала перемещения, включенного в сигнал интервала перемещения. Дополнительно, блок 30 накопления позиции цели накапливает данные о позиции цели, которая является скорректированной относительной позицией (которые могут называться "данными о позиции цели" в описании).
Когда данные о позиции цели уже были накоплены, блок 30 накопления позиции цели обновляет накопленные данные о позиции цели с помощью интервала перемещения, включенного в сигнал интервала перемещения.
[0015] Для обновления данных о позиции цели относительная позиция, включенная в уже накопленные данные о позиции цели, относительно перемещается на интервал ΔP перемещения, включенный в сигнал интервала перемещения. Кроме того, накопленные данные о позиции цели перезаписываются относительной позицией, относительно перемещенной на интервал ΔP перемещения, чтобы обновлять данные о позиции цели.
Таким образом, блок 30 накопления позиции цели устанавливается в транспортном средстве MC. Кроме того, блок 30 накопления позиции цели накапливает данные об относительных позициях, обнаруженных посредством блока 10 обнаружения позиции цели. Кроме того, блок 30 накопления позиции цели перемещает данные о ранее накопленной относительной позиции цели в направлении, обратном направлению движения транспортного средства MC, на интервал ΔP перемещения для интервала времени, прошедшего до текущего времени, оцененного посредством блока 20 оценки интервала перемещения, и накапливает перемещенные данные в качестве данных о позиции цели.
[0016] Блок 40 получения картографической информации устанавливается в транспортном средстве MC и получает картографические данные и информацию о позиции цели, присутствующей в картографических данных. Например, блок 40 получения картографической информации является автомобильной навигационной системой, картографической базой данных или т.п.
Блок 40 получения картографической информации может внешним образом получать картографическую информацию через систему связи, такую как беспроводная связь (которая может быть связью между дорогой и транспортным средством или связью между транспортными средствами). В этом случае блок 40 получения картографической информации может регулярно получать самую последнюю картографическую информацию, чтобы обновлять имеющуюся картографическую информацию. Блок 40 получения картографической информации может также накапливать, в качестве картографической информации, путь, по которому транспортное средство фактически проехало.
Таким образом, блок 40 получения картографической информации получает картографическую информацию, включающую в себя информацию о позиции цели для цели, присутствующей на карте.
[0017] Блок 50 оценки позиции начала изгиба определяет, является или нет путь движения, по которому транспортное средство MC движется, участком с изгибом. Блок 50 оценки позиции начала изгиба, который определил, является или нет путь движения, по которому транспортное средство MC движется, участком с изгибом, выводит информационный сигнал, включающий в себя результат определения (который может называться "сигналом результата определения" в последующем описании) в блок 60 оценки собственной позиции.
Кроме того, блок 50 оценки позиции начала изгиба оценивает позицию начала участка с изгибом (которая может называться "позицией начала изгиба" в последующем описании), когда определяет, что путь движения, по которому транспортное средство MC движется, является участком с изгибом.
[0018] Позиция начала изгиба является позицией, в которой путь движения, по которому транспортное средство MC движется, изменяется с прямого участка на участок с изгибом, как иллюстрировано на фиг. 3. На фиг. 3 позиция начала изгиба обозначается позиционным обозначением "C0". На фиг. 3 центр тяжести транспортного средства MC обозначается позиционным обозначением "CG".
Блок 50 оценки позиции начала изгиба, который оценил позицию C0 начала изгиба, выводит информационный сигнал, включающий в себя оцененную позицию C0 начала изгиба (который может называться "сигналом позиции начала изгиба" в последующем описании) в блок 60 оценки собственной позиции.
Например, по меньшей мере одна обработка из последующей обработки AI-AIII для определения участка с изгибом используется в качестве обработки для определения того, является или нет путь движения, по которому транспортное средство MC движется, участком с изгибом, посредством блока 50 оценки позиции начала изгиба (обработка определения участка с изгибом).
[0019] (Обработка AI для определения участка с изгибом)
Когда абсолютное значение текущего угла поворота рулевого колеса, обнаруженное посредством датчика 8 угла поворота рулевого колеса, изменяется от меньшего, чем предварительно заданный пороговый угол поворота рулевого колеса, до не менее чем порогового угла поворота рулевого колеса, определяется, что путь движения, по которому транспортное средство MC движется, является участком с изгибом.
(Обработка AII для определения участка с изгибом)
Когда абсолютное значение угла поворота вокруг вертикальной оси, обнаруженное посредством гиродатчика, изменяется от меньшего, чем предварительно заданный пороговый угол поворота вокруг вертикальной оси, до не менее чем порогового угла поворота вокруг вертикальной оси, определяется, что путь движения, по которому транспортное средство MC движется, является участком с изгибом.
(Обработка AIII для определения участка с изгибом)
Собственная позиция, оцененная посредством блока 60 оценки собственной позиции в предыдущей обработке, вводится в картографические данные, полученные посредством блока 40 получения картографической информации. Когда собственная позиция, оцененная посредством блока 60 оценки собственной позиции в предыдущей обработке, находится на участке с изгибом в картографических данных, определяется, что путь движения, по которому транспортное средство MC движется, является участком с изгибом.
Таким образом, блок 50 оценки начала изгиба устанавливается в транспортном средстве MC и оценивает позицию C0 начала изгиба пути движения, по которому транспортное средство MC движется.
[0020] Блок 60 оценки собственной позиции выбирает данные о позиции цели, используемые для оценки текущей позиции транспортного средства MC (собственной позиции), из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели. В последующем описании данные о позиции цели, выбранные для использования в оценке собственной позиции, могут называться "выбранными данными о позиции цели". Обработка выбора данных о позиции цели, используемых для оценки собственной позиции, будет описана позже.
Кроме того, блок 60 оценки собственной позиции оценивает собственную позицию, сравнивая выбранные данные о позиции цели с информацией о позиции цели, полученной посредством блока 40 получения картографической информации. Обработка сравнения выбранных данных о позиции цели с информацией о позиции цели, полученной посредством блока 40 получения картографической информации, будет описана позже.
[0021] В первом варианте осуществления описывается случай, в котором конфигурация блока 60 оценки собственной позиции является конфигурацией, в которой собственная позиция оценивается с помощью данных о позиции цели, присутствующих около транспортного средства MC, и данных о позиции цели между текущей позицией транспортного средства MC и позицией начала пути с изгибом.
Оценка собственной позиции выполняется в случае, в котором расстояние LS движения по прямой, которое является расстоянием, на которое транспортное средство MC движется прямо, равно или больше предварительно заданного порогового расстояния LS0 для оценки (например, LS0=100 [м]). Обработка вычисления расстояния LS движения по прямой будет описана позже.
Блок 60 оценки собственной позиции, который оценил собственную позицию, выводит информационный сигнал, включающий в себя оцененную собственную позицию (которая может называться "сигналом собственной позиции" в последующем описании), в систему 100 помощи при вождении, как иллюстрировано на фиг. 2.
Система 100 помощи при вождении, которая является известной системой, устанавливается в транспортном средстве MC.
Система 100 помощи при вождении предоставляет информацию, такую как тревожное оповещение, водителю транспортного средства MC и выполняет помощь при вождении, такую как торможение транспортного средства MC, с помощью собственной позиции, включенной в сигнал собственной позиции, введенный из устройства 60 оценки собственной позиции. Конфигурация системы 100 помощи при вождении является известной в области техники, и, следовательно, ее описание пропускается.
[0022] (Обработка вычисления расстояния LS движения по прямой)
Обработка вычисления расстояния LS движения по прямой посредством блока 60 оценки собственной позиции (обработка вычисления расстояния движения по прямой) будет описана ниже со ссылкой на фиг. 1-3.
В обработке для вычисления расстояния движения по прямой сначала определяется, движется или нет транспортное средство MC прямо. Подсчет расстояния движения начинается с момента времени, в который определяется, что транспортное средство MC движется прямо, и подсчет расстояния движения прекращается в момент времени, в который определяется, что транспортное средство MC не движется прямо. Расстояние, на которое транспортное средство MC движется между началом и окончанием подсчета, дополнительно вычисляется как расстояние LS движения по прямой.
Например, по меньшей мере одна обработка из последующей обработки I-III для определения движения по прямой используется в качестве обработки для определения того, движется или нет транспортное средство MC прямо, посредством блока 60 оценки собственной позиции (обработка определения движения по прямой).
[0023] (Обработка I для определения движения по прямой)
Когда абсолютное значение текущего угла поворота рулевого колеса, обнаруженное посредством датчика 8 угла поворота рулевого колеса, меньше порогового угла поворота рулевого колеса, определяется, что транспортное средство MC движется прямо.
(Обработка II для определения движения по прямой)
Когда абсолютное значение угла поворота вокруг вертикальной оси, обнаруженное посредством гиродатчика, меньше предварительно заданного порогового угла поворота вокруг вертикальной оси, определяется, что транспортное средство MC движется прямо.
[0024] (Обработка III для определения движения по прямой)
Собственная позиция, оцененная посредством блока 60 оценки собственной позиции в предыдущей обработке, вводится в картографические данные, полученные посредством блока 40 получения картографической информации. Когда собственная позиция, оцененная посредством блока 60 оценки собственной позиции в предыдущей обработке, находится на прямом участке в картографических данных, определяется, что транспортное средство MC движется прямо. Прямой участок может быть определен на основе предварительно определенного порогового значения, заданного, например, при изгибе участка дороги, включенного в картографические данные, равном 1000 R или более. Изгиб участка дороги может также быть оценен посредством аппроксимации кривой, сформированной из узловых точек в картографических данных.
Абсолютное значение угла поворота рулевого колеса, обнаруженное посредством датчика 8 угла поворота рулевого колеса, и абсолютное значение угла поворота вокруг вертикальной оси, обнаруженное гиродатчиком, получаются, например, от датчика 8 угла поворота рулевого колеса и гиродатчика. Абсолютное значение угла поворота рулевого колеса, обнаруженное посредством датчика 8 угла поворота рулевого колеса, и абсолютное значение угла поворота вокруг вертикальной оси, обнаруженное посредством гиродатчика, могут также быть получены, например, от блока 20 оценки интервала перемещения.
[0025] (Обработка выбора данных о позиции цели, используемых для оценки собственной позиции)
Обработка выбора данных о позиции цели, используемых для оценки собственной позиции, из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели, посредством блока 60 оценки собственной позиции (обработка выбора данных) будет описана ниже со ссылкой на фиг. 4 и фиг. 5, в то же время ссылаясь на фиг. 1-3.
В обработке для выбора данных сначала определяется, удовлетворяются или нет следующие условия BI-BIII.
[0026] (Условие BI)
Расстояние LS движения по прямой непосредственно перед прибытием в позицию C0 начала изгиба, оцененную посредством блока 50 оценки позиции начала изгиба, равно или больше порогового расстояния LS0 для оценки. Альтернативно, скорость движения при движении по прямой непосредственно перед прибытием в позицию C0 начала изгиба, оцененную посредством блока 50 оценки позиции начала изгиба равно или меньше пороговой скорости движения.
Расстояние LS движения по прямой вычисляется в (обработке для вычисления расстояния LS движения по прямой), описанной выше.
(Условие BII)
Расстояние между транспортным средством MC и позицией C0 начала изгиба, оцененное посредством блока 50 оценки позиции начала изгиба, равно или меньше предварительно заданного первого порогового расстояния L1 (например, L1=100 [м]).
Первое пороговое расстояние L1 задается на основе, например, диапазона расстояния, в котором накопленная погрешность интервала перемещения, оцененного посредством блока 20 оценки интервала перемещения, является приемлемой.
[0027] (Условие BIII)
Расстояние между транспортным средством MC и позицией C0 начала изгиба, оцененное посредством блока 50 оценки позиции начала изгиба, равно или больше предварительно заданного второго порогового расстояния L2 (например, L2=20 [м]).
Когда все из условия BI, условия BII и условия BIII из условий, описанных выше, удовлетворяются, данные о позиции цели, присутствующей около транспортного средства MC, выбираются из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели. Кроме того, данные о позиции цели между текущей позицией транспортного средства MC и позицией C0 начала изгиба выбираются из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели.
[0028] Другими словами, только данные о позиции цели, присутствующей в области R1 около транспортного средства MC и между текущей позицией транспортного средства MC и позицией C0 начала изгиба, как иллюстрировано на фиг. 3, выбирается в качестве выбранных данных о позиции цели из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели.
Выбранные данные о позиции цели, для которых относительная позиция была обнаружена прежде прибытия в позицию C0 начала изгиба в направлении движения транспортного средства MC, обозначаются позиционным обозначением "Ei" на фиг. 3. Аналогично, выбранные данные о позиции цели, для которых относительная позиция была обнаружена между текущей позицией транспортного средства MC и позицией C0 начала изгиба в направлении движения транспортного средства MC, обозначаются позиционным обозначением "Si" на фиг. 3.
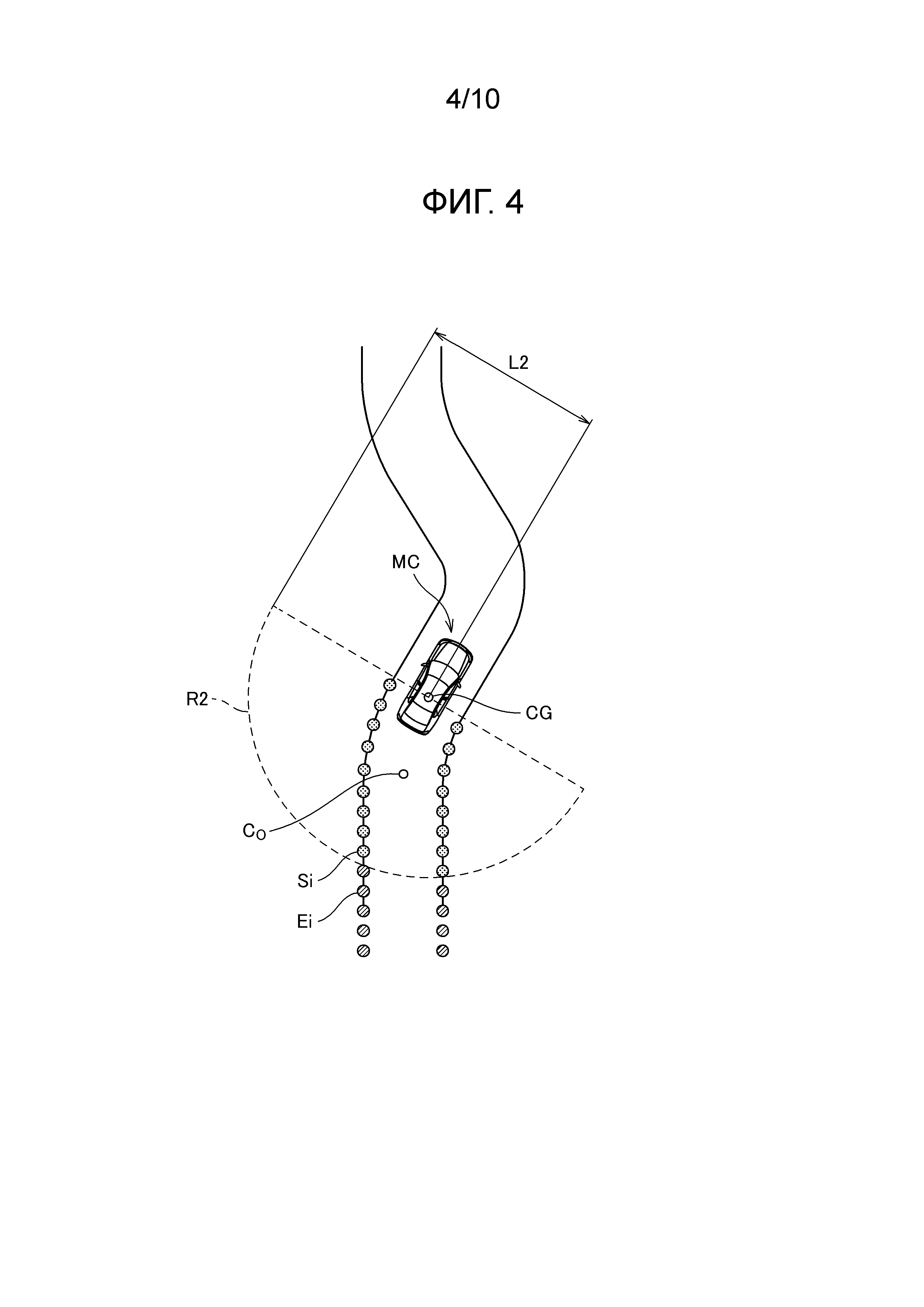
[0029] Когда только условие BI и условие BII из условий, описанных выше, удовлетворяются, данные о позиции цели, присутствующей в области, в которой расстояние относительно транспортного средства MC равно или меньше второго порогового расстояния L2, выбирается из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели.
Второе пороговое расстояние L2 является расстоянием, включающим в себя данные о позиции цели между текущей позицией транспортного средства MC и позицией C0 начала изгиба, оцененной посредством блока 50 оценки позиции начала изгиба, из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели.
Другими словами, данные о позиции цели, присутствующей в области R2, которые находятся на расстоянии не превышающем второе пороговое расстояние L2 от транспортного средства MC в области, в которой транспортное средство MC двигалось, как иллюстрировано на фиг. 4, выбираются в качестве выбранных данных о позиции цели из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели. Второе пороговое расстояние L2 задается в качестве диапазона расстояния, в котором, по меньшей мере, данные о позиции цели, требуемые для оценки собственной позиции посредством сравнения с информацией о позиции цели, полученной посредством блока 40 получения картографической информации, могут быть обеспечены.
[0030] Выбранные данные о позиции цели, присутствующей за пределами области R2, которая находится на более чем втором пороговом расстоянии L2 от транспортного средства MC, в области, в которой транспортное средство MC двигалось, обозначается позиционным обозначением "Ei" на фиг. 4. Аналогично, выбранные данные о позиции цели, присутствующей в области R2, которая находится на расстоянии не превышающем второе пороговое расстояние L2 от транспортного средства MC, в области, в которой транспортное средство MC двигалось, обозначается позиционным обозначением "Si" на фиг. 4.
На фиг. 4 область R2 рассматривается как область, которая находится на расстоянии не превышающем второе пороговое расстояние L2 от центра тяжести CG транспортного средства MC.
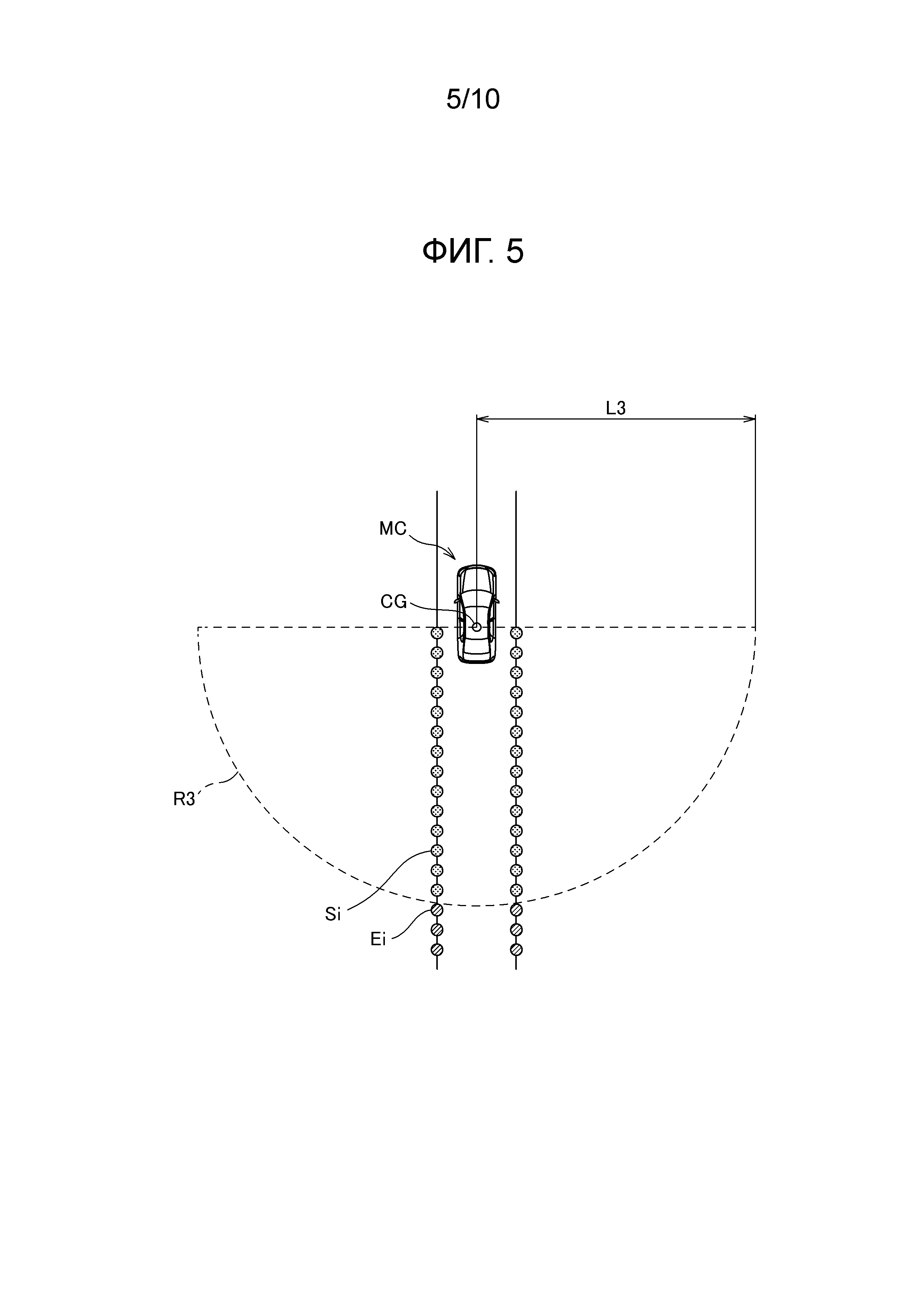
Когда только условие BI из условий, описанных выше, удовлетворяется, данные о позиции цели, присутствующей в области, в которой расстояние относительно транспортного средства MC равно или меньше предварительно заданного третьего порогового расстояния L3, выбирается из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели. Когда ни одно из условий, описанных выше, не удовлетворяется, данные о позиции цели, присутствующей в области, в которой расстояние относительно транспортного средства MC равно или меньше третьего порогового расстояния L3, также выбираются из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели, аналогичным образом.
[0031] Третье пороговое расстояние L3 задается в качестве диапазона расстояния, в котором, по меньшей мере, данные о позиции цели, требуемые для оценки собственной позиции посредством сравнения с информацией о позиции цели, полученной посредством блока 40 получения картографической информации, могут быть достаточно обеспечены. Другими словами, третье пороговое расстояние L3 может быть задано, например, в расстояние, которое меньше первого порогового расстояния L1, и которое больше второго порогового расстояния L2 (L1 > L3 > L2).
Третье пороговое расстояние L3 является расстоянием, включающим в себя данные о позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала изгиба, оцененной посредством блока 50 оценки позиции начала изгиба, в данных о позиции цели, накопленных посредством блока 30 накопления позиции цели.
[0032] Другими словами, данные о позиции цели, присутствующей в области R3, которая находится на расстоянии не превышающем третье пороговое расстояние L3 от транспортного средства MC в области, в которой транспортное средство MC двигалось, как иллюстрировано на фиг. 5, выбираются в качестве выбранных данных о позиции цели из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели.
Выбранные данные о позиции цели, присутствующей за пределами области R3, которая находится на более чем третьем пороговом расстоянии L3 от транспортного средства MC, в области, в которой транспортное средство MC двигалось, обозначаются позиционным обозначением "Ei" на фиг. 5. Аналогично, выбранные данные о позиции цели, присутствующей в области R3, которая находится на расстоянии не превышающем третье пороговое расстояние L3 от транспортного средства MC, в области, в которой транспортное средство MC двигалось, обозначаются позиционным обозначением "Si" на фиг. 5. На фиг. 5 область R3 рассматривается как область, которая находится на расстоянии не превышающем третье пороговое расстояние L3 от центра тяжести CG транспортного средства MC.
[0033] (Обработка сравнения выбранных данных о позиции цели с позиционной информацией цели, полученной посредством блока 40 получения картографической информации)
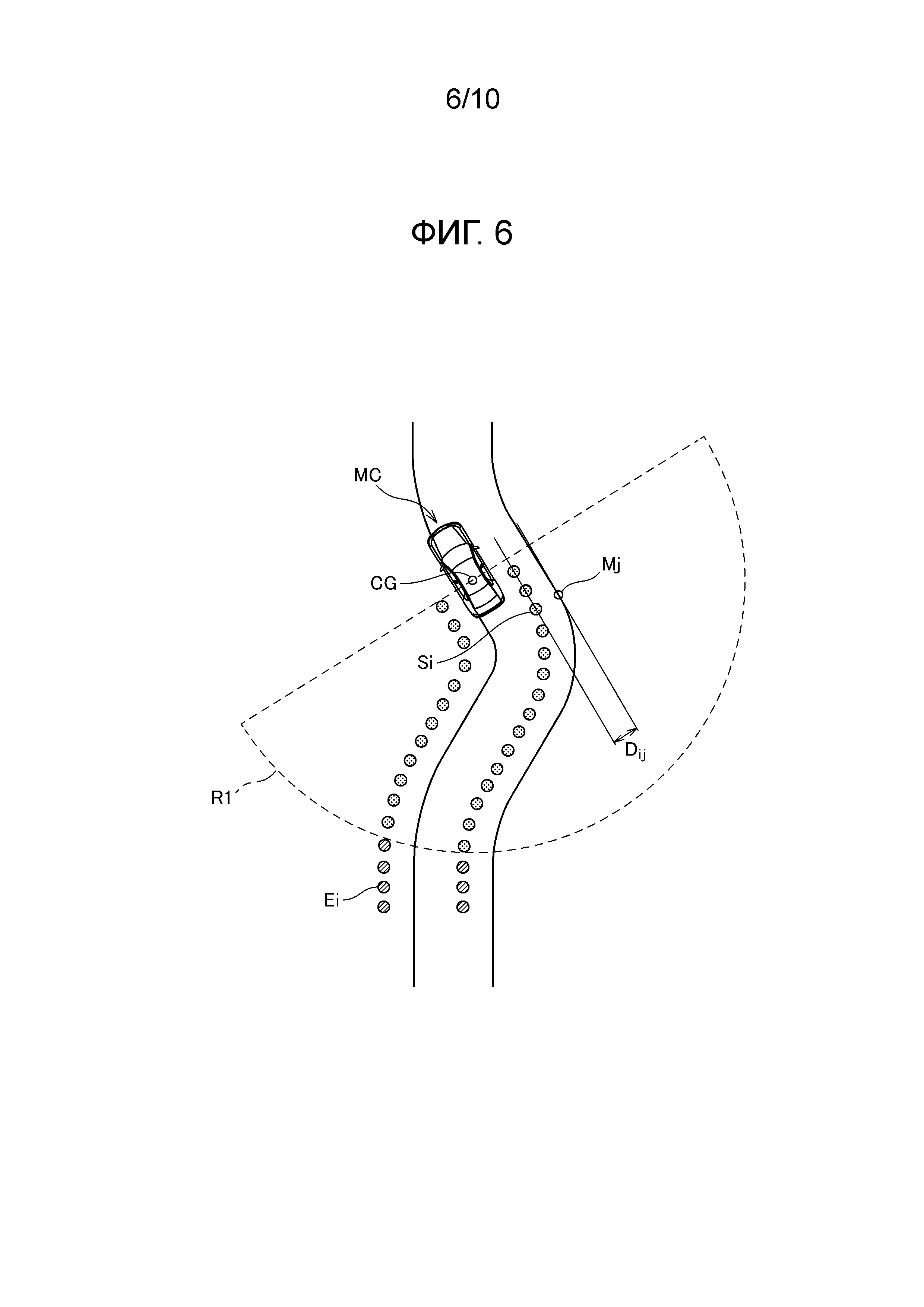
Обработка сравнения выбранных данных о позиции цели с позиционной информацией цели, полученной посредством блока 40 получения картографической информации, посредством блока 60 оценки собственной позиции (обработка сравнения данных) будет описана ниже со ссылкой на фиг. 6, в то же время обращаясь к фиг. 1-5.
В обработке сравнения данных выбранные данные о позиции цели, выбранные в обработке для выбора данных, сравниваются с информацией о позиции цели, полученной посредством блока 40 получения картографической информации.
В частности, расстояние Dij между одной выбранной частью выбранных данных Si о позиции цели из выбранных данных о позиции цели и позиционной информацией Mj, которая является ближайшей к одной выбранной части данных Si о позиции цели, из позиционной информации цели, полученной посредством блока 40 получения картографической информации, вычисляется, как иллюстрировано на фиг. 6. Следовательно, выбранные данные Si о позиции цели и позиционная информация Mj присутствуют в одной и той же области (R1, R2 или R3).
Такие расстояния Dij вычисляются для всех частей выбранных данных о позиции цели.
Среднее значение S для расстояний Dij вычисляется с помощью следующего уравнения (1).
[0034] [Мат. 1]

[0035] "N" в уравнении (1) представляет число частей выбранных данных о позиции цели, выбранных в обработке для выбора данных.
Позиция и положение транспортного средства MC с наименьшим средним значением S вычисляются посредством числового анализа, и вычисленная позиция и положение транспортного средства MC рассматриваются как оцененные значения собственной позиции.
Как описано выше, блок 60 оценки собственной позиции сравнивает данные о позиции цели, присутствующей около транспортного средства MC, и выбранные данные о позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала изгиба, с позиционной информацией цели, включенной в картографическую информацию, чтобы оценивать собственную позицию. Блок 60 оценки собственной позиции устанавливается в транспортном средстве MC.
[0036] Кроме того, блок 60 оценки собственной позиции выбирает данные о позиции цели, присутствующей в диапазоне (область R2 или R3), в котором транспортное средство MC прослеживается на пороговом расстоянии (втором пороговом расстоянии L2 или третьем пороговом расстоянии L3) по пути движения транспортного средства MC из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели. Блок 60 оценки собственной позиции дополнительно сравнивает позицию цели, присутствующей в диапазоне, в котором транспортное средство MC отслеживается на пороговом расстоянии по пути движения транспортного средства MC, из позиционной информации цели, полученной, посредством блока 40 получения картографической информации, с выбранными данными о позиции цели, чтобы оценивать собственную позицию.
[0037] (Действие)
Пример действия, выполняемого с помощью устройства 1 оценки собственной позиции согласно первому варианту осуществления, будет описан со ссылкой на фиг. 7A и фиг. 7B, в то же время обращаясь к фиг. 1-6.
Сначала, обработка этапа S100 выполняется, когда действие, которое выполняется с помощью устройства 1 оценки собственной позиции, начинается (НАЧАЛО), как иллюстрировано на фиг. 7A и фиг. 7B.
На этапе S100 блок 10 обнаружения позиции цели обнаруживает цель, присутствующую в области около транспортного средства MC, включающей в себя область впереди транспортного средства MC, и обнаруживает относительные позиции обнаруженной цели и транспортного средства MC ("ОБНАРУЖЕНИЕ ПОЗИЦИИ ЦЕЛИ", иллюстрируется на чертеже). Когда относительные позиции цели и транспортного средства MC обнаружены на этапе S100, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S102.
[0038] На этапе S102 блок 20 оценки интервала перемещения оценивает интервал ΔP перемещения транспортного средства MC от предыдущего цикла обработки ("ОЦЕНКА ИНТЕРВАЛА ПЕРЕМЕЩЕНИЯ", иллюстрированная на чертеже). Когда интервал ΔP перемещения транспортного средства MC оценивается на этапе S102, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S104.
На этапе S104 блок 30 накопления позиции цели корректирует относительные позиции, обнаруженные на этапе S100, с помощью интервала перемещения транспортного средства MC, оцененного на этапе S102. Кроме того, блок 30 накопления позиции цели накапливает данные о позиции цели ("НАКОПЛЕНИЕ ИНФОРМАЦИИ О ПОЗИЦИИ ЦЕЛИ", иллюстрируется на чертеже) на этапе S104. Когда данные о позиции цели накапливаются на этапе S104, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S106.
[0039] На этапе S106 блок 50 оценки позиции начала изгиба определяет, является или нет путь движения, по которому транспортное средство MC движется, участком с изгибом. В результате, обработка определения того, начинает или нет транспортное средство MC двигаться по участку с изгибом ("ОНО НАЧИНАЕТ ДВИГАТЬСЯ ПО ИЗГИБУ?" иллюстрируется на чертеже), выполняется на этапе S106.
Когда определяется, что транспортное средство MC начинает двигаться по участку с изгибом ("ДА" иллюстрируется на чертеже), на этапе S106, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S108.
[0040] Напротив, когда определяется, что транспортное средство MC не начинает двигаться по участку с изгибом ("НЕТ" иллюстрируется на чертеже), на этапе S106, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S122.
На этапе S108 блок 50 оценки позиции начала изгиба оценивает позицию C0 начала изгиба ("ОЦЕНКА ПОЗИЦИИ C0 НАЧАЛА ИЗГИБА" иллюстрируется на чертеже). Когда позиция C0 начала изгиба оценивается на этапе S108, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S110.
[0041] На этапе S110 блок 60 оценки собственной позиции выполняет обработку для определения того, действительно или нет расстояние LS движения по прямой непосредственно перед прибытием в позицию C0 начала изгиба равно или больше порогового расстояния LS0 для оценки ("РАССТОЯНИЕ ДВИЖЕНИЯ ПО ПРЯМОЙ НЕПОСРЕДСТВЕННО ПЕРЕД ПРИБЫТИЕМ В ПОЗИЦИЮ НАЧАЛА ИЗГИБА РАВНО ИЛИ БОЛЬШЕ ПОРОГОВОГО РАССТОЯНИЯ ДЛЯ ОЦЕНКИ?" иллюстрируется на чертеже).
Когда определяется, что расстояние LS движения по прямой непосредственно перед прибытием в позицию C0 начала изгиба равно или больше порогового расстояния LS0 для оценки ("ДА" иллюстрируется на чертеже), на этапе S110, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S114.
В отличие от этого, когда определяется, что расстояние LS движения по прямой непосредственно перед прибытием в позицию C0 начала изгиба меньше порогового расстояния LS0 для оценки ("НЕТ" иллюстрируется на чертеже), на этапе S110, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S112.
[0042] На этапе S112 блок 60 оценки собственной позиции выполняет обработку для определения, действительно или нет скорость VP перемещения на прямом участке движения непосредственно перед прибытием в позицию C0 начала изгиба равна или меньше предварительно заданной пороговой скорости VP0 (например, VP0=1,4 [м/с]). Другими словами, обработка определения того, удовлетворять или нет условие "СКОРОСТЬ ПЕРЕМЕЩЕНИЯ НА ПРЯМОМ УЧАСТКЕ ДВИЖЕНИЯ НЕПОСРЕДСТВЕННО ПЕРЕД ПРИБЫТИЕМ В ПОЗИЦИЮ НАЧАЛА ИЗГИБА РАВНА ИЛИ МЕНЬШЕ ПОРОГОВОЙ СКОРОСТИ?", иллюстрированное на чертеже, выполняется на этапе S112. Скорость перемещения может быть скоростью транспортного средства. В этом случае пороговая скорость VP 0 может быть задана, например, в 5 [км/ч].
Когда определяется, что скорость VP перемещения на прямом участке движения непосредственно перед прибытием в позицию C0 начала изгиба равна или меньше пороговой скорости VP0 ("ДА" иллюстрируется на чертеже), на этапе S112, действие, выполняемое устройством 1 оценки собственной позиции, переходит к этапу S114.
[0043] Напротив, когда определяется, что скорость VP перемещения на прямом участке движения непосредственно перед прибытием в позицию C0 начала изгиба больше пороговой скорости VP0 ("НЕТ" иллюстрируется на чертеже), на этапе S112, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S122.
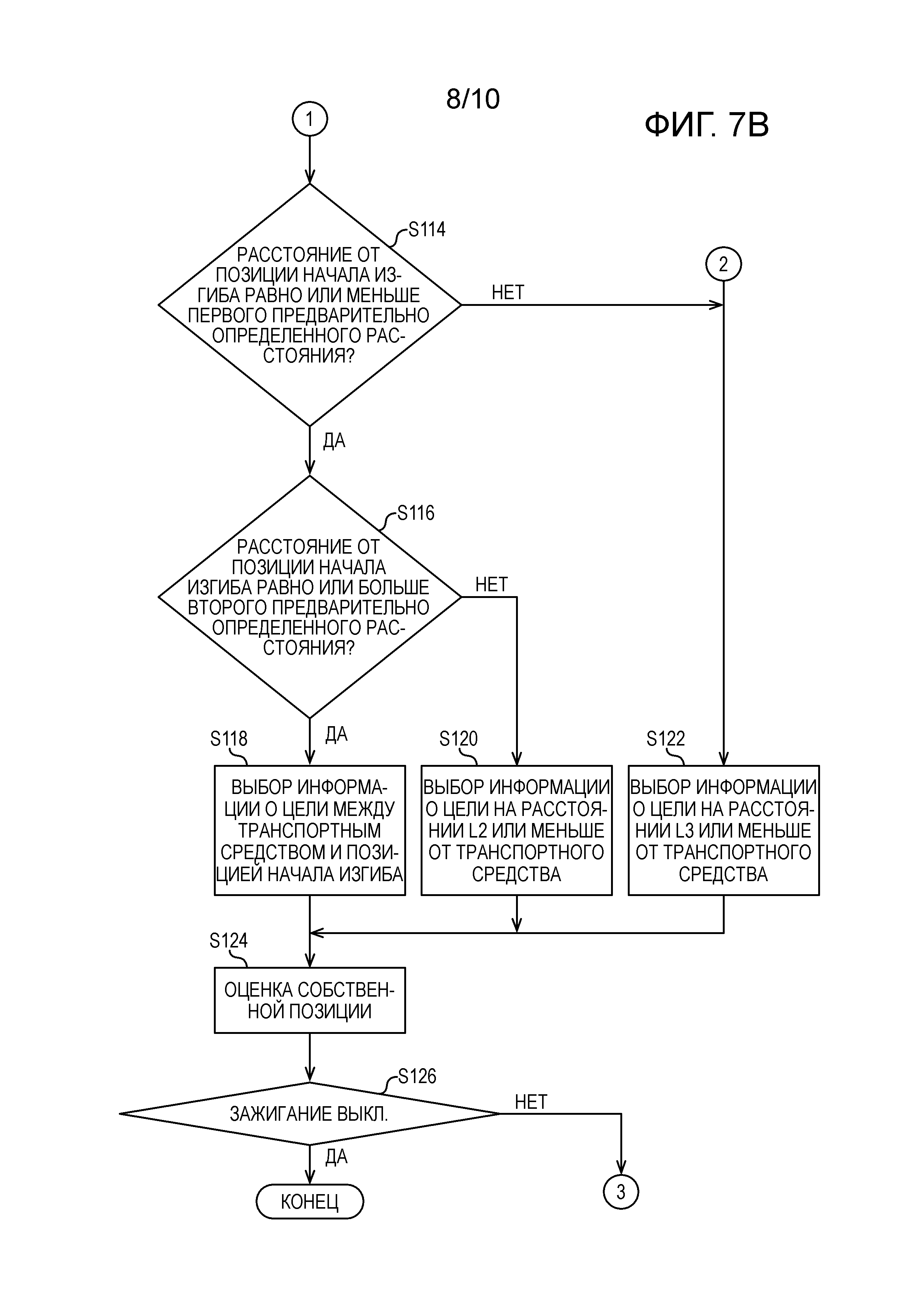
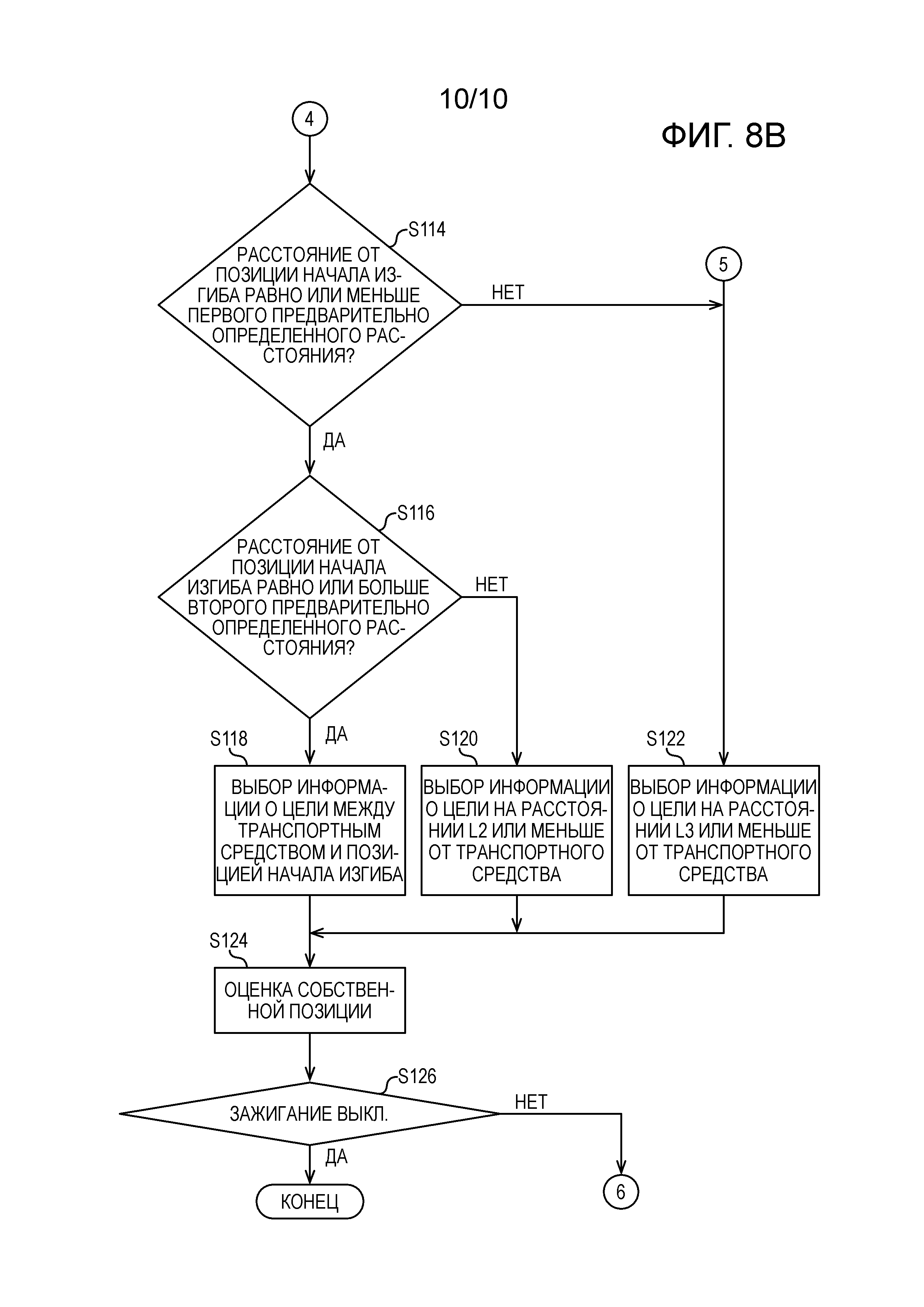
На этапе S114 блок 60 оценки собственной позиции выполняет обработку для определения того, удовлетворяется или нет вышеописанное условие BII. Другими словами, обработка определения того, действительно или нет расстояние L между транспортным средством MC и позицией C0 начала изгиба (см. фиг. 3) равно или меньше первого порогового расстояния L1 ("РАССТОЯНИЕ ОТ ПОЗИЦИИ НАЧАЛА ИЗГИБА РАВНО ИЛИ МЕНЬШЕ ПЕРВОГО ПОРОГОВОГО РАССТОЯНИЯ?" иллюстрируется на чертеже), выполняется на этапе S114. Расстояние L между транспортным средством MC и позицией C0 начала изгиба является, в частности, расстоянием L между центром тяжести CG транспортного средства MC и позицией C0 начала изгиба.
[0044] Когда определяется, что расстояние L между транспортным средством MC и позицией C0 начала изгиба равно или меньше первого порогового расстояния L1 ("ДА" иллюстрируется на чертеже), на этапе S114, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S116.
Напротив, когда определяется, что расстояние L между транспортным средством MC и позицией C0 начала изгиба больше первого порогового расстояния L1 ("НЕТ" иллюстрируется на чертеже), на этапе S114, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S122.
На этапе S116 блок 60 оценки собственной позиции выполняет обработку для определения того, удовлетворяется или нет вышеописанное условие BIII. Другими словами, обработка определения того, действительно или нет расстояние L между транспортным средством MC и позицией C0 начала изгиба (см. фиг. 3) равно или больше второго порогового расстояния L2 ("РАССТОЯНИЕ ОТ ПОЗИЦИИ НАЧАЛА ИЗГИБА РАВНО ИЛИ БОЛЬШЕ ВТОРОГО ПОРОГОВОГО РАССТОЯНИЯ?" иллюстрируется на чертеже), выполняется на этапе S116.
Когда определяется, что расстояние L между транспортным средством MC и позицией C0 начала изгиба равно или больше второго порогового расстояния L2 ("ДА" иллюстрируется на чертеже), на этапе S116, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S118.
[0045] Напротив, когда определяется, что расстояние L между транспортным средством MC и позицией C0 начала изгиба меньше второго порогового расстояния L2 ("НЕТ" иллюстрируется на чертеже), на этапе S116, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S120.
На этапе S118 блок 60 оценки собственной позиции выбирает, в качестве выбранных данных Si о позиции цели, данные о позиции цели, присутствующей в области R1 между позицией C0 начала изгиба и транспортным средством MC (см. фиг. 3). Другими словами, данные о позиции цели, присутствующей около транспортного средства MC, и данные о позиции цели, присутствующей в области R1 между текущей позицией транспортного средства MC и позицией C0 начала изгиба, выбираются в качестве выбранных данных Si о позиции цели на этапе S118. Следовательно, обработка "ВЫБОРА ИНФОРМАЦИИ О ЦЕЛИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПОЗИЦИЕЙ НАЧАЛА ИЗГИБА", иллюстрированная на чертеже, выполняется на этапе S118. Когда данные о позиции цели, присутствующей в области R1, выбираются в качестве выбранных данных Si о позиции цели на этапе S118, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S124.
[0046] На этапе S120 блок 60 оценки собственной позиции выбирает, в качестве выбранных данных Si о позиции цели, данные о позиции цели, присутствующей в области R2, в которой расстояние относительно транспортного средства MC равно или меньше второго порогового расстояния L2 (см. фиг. 4). Другими словами, данные о позиции цели, присутствующей в области R2, в которой расстояние относительно транспортного средства MC равно или меньше второго порогового расстояния L2, выбираются ("ВЫБОР ИНФОРМАЦИИ О ЦЕЛИ НА РАССТОЯНИИ L2 ИЛИ МЕНЕЕ ОТ ТРАНСПОРТНОГО СРЕДСТВА" иллюстрируется на чертеже) в качестве выбранных данных Si о позиции цели на этапе S120. Когда данные о позиции цели, присутствующей в области R2, выбираются в качестве выбранных данных Si о позиции цели на этапе S120, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S124.
[0047] На этапе S122 блок 60 оценки собственной позиции выбирает, в качестве выбранных данных Si о позиции цели, данные о позиции цели, присутствующей в области R3, в которой расстояние относительно транспортного средства MC равно или меньше третьего порогового расстояния L3 (см. фиг. 5). Другими словами, данные о позиции цели, присутствующей в области R3, в которой расстояние относительно транспортного средства MC равно или меньше третьего порогового расстояния L3, выбираются ("ВЫБОР ИНФОРМАЦИИ О ЦЕЛИ НА РАССТОЯНИИ L3 ИЛИ МЕНЕЕ ОТ ТРАНСПОРТНОГО СРЕДСТВА" иллюстрируется на чертеже) в качестве выбранных данных Si о позиции цели на этапе S122. Когда данные о позиции цели, присутствующей в области R3, выбираются в качестве выбранных данных Si о позиции цели на этапе S122, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S124.
[0048] На этапе S124, посредством блока 60 оценки собственной позиции, выбранные данные Si о позиции цели, выбранные на каком-либо одном этапе из этапов S118, S120 и S122, сравниваются с информацией о позиции цели, полученной посредством блока 40 получения картографической информации. В результате, собственная позиция оценивается с помощью выбранных данных Si о позиции цели, выбранных на каком-либо одном этапе из этапов S118, S120 и S122 ("ОЦЕНКА СОБСТВЕННОЙ ПОЗИЦИИ" иллюстрируется на чертеже), на этапе S124. Когда собственная позиция оценивается на этапе S124, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S126.
[0049] На этапе S126 выполняется обработка определения того, находится или нет переключатель зажигания (не иллюстрирован) транспортного средства MC в состоянии остановки ("ЗАЖИГАНИЕ ВЫКЛ." иллюстрируется на чертеже).
Когда определяется, что переключатель зажигания транспортного средства MC находится в состоянии остановки ("ДА" иллюстрируется на чертеже), на этапе S126, действие, выполняемое с помощью устройства 1 оценки собственной позиции, заканчивается (КОНЕЦ).
Напротив, когда определяется, что переключатель зажигания транспортного средства MC не находится в состоянии остановки ("НЕТ" иллюстрируется на чертеже), на этапе S126, действие, выполняемое с помощью устройства 1 оценки собственной позиции, возвращается к этапу S100.
[0050] Как описано выше, относительные позиции цели, присутствующей около транспортного средства MC, и транспортного средства MC, обнаруживаются, и интервал перемещения транспортного средства MC и позиция C0 начала изгиба для пути движения, по которому транспортное средство MC движется, оцениваются в способе оценки собственной позиции, выполняемом в действии устройства 1 оценки собственной позиции согласно первому варианту осуществления. Данные о позиции цели, присутствующей около транспортного средства MC, и данные о позиции цели между текущей позицией транспортного средства MC и оцениваемой позицией C0 начала изгиба, из данных о позиции цели, сравниваются с информацией о позиции цели, включенной в картографические данные, чтобы оценивать собственную позицию.
Первый вариант осуществления, описанный выше, является примером настоящего изобретения, настоящее изобретение не ограничивается первым вариантом осуществления, описанным выше, и различные модификации могут быть выполнены в зависимости от проекта или т.п. без отступления от технической идеи согласно настоящему изобретению, даже если являются формами помимо этого варианта осуществления.
[0051] (Результаты первого варианта осуществления)
Устройство 1 оценки собственной позиции согласно первому варианту осуществления может показывать результаты, описанные ниже.
(1) Блок 50 оценки позиции начала изгиба оценивает позицию C0 начала изгиба пути движения, по которому транспортное средство MC движется. Кроме того, блок 60 оценки собственной позиции сравнивает данные о позиции цели, присутствующей около транспортного средства MC, и данные о позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала изгиба, с информацией о позиции цели, включенной в картографическую информацию, чтобы оценивать собственную позицию.
Следовательно, даже если транспортное средство MC въезжает на путь с изгибом с прямого пути, собственная позиция оценивается с помощью данных о позиции цели вдоль формы изгиба. Данные о позиции цели вдоль формы изгиба являются данными о позиции цели, присутствующими около транспортного средства MC, и данными, присутствующими между текущей позицией транспортного средства MC и позицией C0 начала пути с изгибом.
В результате, собственная позиция на пути с изгибом оценивается на основе данных о позиции цели вдоль формы изгиба, и, следовательно, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
[0052] (2) Блок 60 оценки собственной позиции оценивает собственную позицию, когда расстояние LS движения по прямой, которое является расстоянием, которое транспортное средство MC проехало прямо, равно или больше предварительно заданного порогового расстояния LS0 для оценки.
Следовательно, собственная позиция оценивается с помощью данных о позиции цели, присутствующих около транспортного средства MC, и позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала изгиба, когда расстояние LS движения по прямой равно или больше порогового расстояния LS0 для оценки.
В результате, собственная позиция может быть оценена на основе данных о позиции цели вдоль формы изгиба даже в случае длинного расстояния движения для прямого пути непосредственно перед достижением пути с изгибом, т.е., даже в случае движения, которое склонно приводить в результате к накоплению погрешности в одометрии. В результате, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
[0053] (3) Блок 60 оценки собственной позиции оценивает собственную позицию, когда транспортное средство MC движется со скоростью перемещения (скоростью транспортного средства), которая равна или меньше пороговой скорости.
Следовательно, собственная позиция может быть оценена с помощью данных о позиции цели, присутствующих около транспортного средства MC, и позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала изгиба, когда транспортное средство MC движется со скоростью перемещения (скоростью транспортного средства), которая равна или меньше пороговой скорости.
В результате, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено, даже после движения с очень низкой скоростью, таком как остановка или трогание с места, т.е., даже после движения, которое склонно приводить в результате к накоплению погрешности в одометрии.
[0054] (4) Блок 60 оценки собственной позиции сравнивает данные о позиции цели, присутствующей в диапазоне, в котором транспортное средство MC отслеживается на пороговом расстоянии на пути движения транспортного средства MC с помощью информации о позиции цели, включенной в картографическую информацию, чтобы оценивать собственную позицию.
Следовательно, собственная позиция оценивается с помощью данных о позиции цели, присутствующих в диапазоне, в котором транспортное средство MC отслеживается на пороговом расстоянии на пути движения транспортного средства MC, и информации о позиции цели, включенной в картографическую информацию. Данные о позиции цели, присутствующей в диапазоне, в котором транспортное средство MC отслеживается на пороговом расстоянии на пути движения транспортного средства MC, включают в себя данные о позиции цели, присутствующей около транспортного средства MC, и цель, присутствующую между текущей позицией транспортного средства MC и позицией C0 начала изгиба.
[0055] В результате, собственная позиция может быть оценена с помощью данных о позиции цели, присутствующей в диапазоне необходимого минимального порогового расстояния, даже во время въезда с прямого пути на путь с изгибом или даже сразу после въезда с прямого пути на путь с изгибом. Данные о позиции цели, присутствующей в диапазоне необходимого минимального порогового расстояния, включают в себя данные о позиции цели, присутствующей около транспортного средства MC, и цели, присутствующей между текущей позицией транспортного средства MC и позиции C0 начала изгиба. В результате, собственная позиция может быть оценена также с помощью данных о позиции цели вдоль формы изгиба, и, следовательно, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
[0056] (5) Блок 60 оценки собственной позиции сравнивает данные о позиции цели, присутствующей около транспортного средства MC, и данные о позиции цели, присутствующей только между текущей позицией транспортного средства MC и позицией C0 начала изгиба, оцененной посредством блока 50 оценки позиции начала изгиба, с информацией о позиции цели, включенной в картографическую информацию. Кроме того, собственная позиция оценивается. Эта оценка выполняется, когда все из условия BI, условия BII и условия BIII из условий, описанных выше, удовлетворяются.
Следовательно, собственная позиция может быть оценена без использования данных, обнаруженных на прямом пути и с помощью данных о позиции цели вдоль формы изгиба, когда транспортное средство MC въезжает на путь с изгибом с прямого пути. Данные о позиции цели вдоль формы изгиба являются данными о позиции цели, присутствующей около транспортного средства MC, и данными о позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала пути с изгибом.
В результате, собственная позиция на пути с изгибом оценивается на основе только данных о позиции цели вдоль формы изгиба, и, следовательно, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
[0057] (6) В способе оценки собственной позиции, выполняемом в действии устройства 1 оценки собственной позиции согласно первому варианту осуществления относительные позиции цели, присутствующей около транспортного средства MC, и транспортного средства MC обнаруживаются, и интервал перемещения транспортного средства MC и позиция C0 начала изгиба пути движения, по которому транспортное средство MC движется, оцениваются. Данные о позиции цели, присутствующей около транспортного средства MC, и данные о позиции цели между текущей позицией транспортного средства MC и оцениваемой позицией C0 начала изгиба, из данных о позиции цели, сравниваются с информацией о позиции цели, включенной в картографические данные, чтобы оценивать собственную позицию.
Следовательно, собственная позиция оценивается с помощью данных о позиции цели вдоль формы изгиба, даже когда транспортное средство MC въезжает на путь с изгибом с прямого пути. Данные о позиции цели вдоль формы изгиба являются данными о позиции цели, присутствующей около транспортного средства MC, и данными о позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала пути с изгибом.
В результате, собственная позиция на пути с изгибом оценивается на основе данных о позиции цели вдоль формы изгиба, и, следовательно, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
[0058] (Альтернативный пример первого варианта осуществления)
(1) В первом варианте осуществления блок 20 оценки интервала перемещения, блок 30 накопления позиции цели, блок 40 получения картографической информации, блок 50 оценки позиции начала изгиба и блок 60 оценки собственной позиции устанавливаются в транспортном средстве MC, но не существует ограничения для этой конфигурации.
Другими словами, также применима конфигурация, в которой, например, центр обработки данных (базовая станция) включает в себя, по меньшей мере один из блока 20 оценки интервала перемещения, блока 30 накопления позиции цели, блока 40 получения картографической информации, блока 50 оценки позиции начала изгиба и блока 60 оценки собственной позиции.
[0059] (Второй вариант осуществления)
Второй вариант осуществления настоящего изобретения будет описан ниже со ссылкой на чертежи.
(Конфигурация устройства оценки собственной позиции)
Конфигурация устройства 1 оценки собственной позиции согласно второму варианту осуществления является такой же, что и конфигурация первого варианта осуществления за исключением обработки, выполняемой посредством блока 60 оценки собственной позиции. Следовательно, только конфигурация блока 60 оценки собственной позиции будет описана в качестве конфигурации устройства 1 оценки собственной позиции второго варианта осуществления.
Блок 60 оценки собственной позиции выбирает выбранные данные о позиции цели из данных о позиции цели, накопленных посредством блока 30 накопления позиции цели. Обработка выбора данных о позиции цели, используемых для оценки собственной позиции, является аналогичной обработке первого варианта осуществления, описанной выше.
Кроме того, блок 60 оценки собственной позиции оценивает собственную позицию, сравнивая выбранные данные о позиции цели с информацией о позиции цели, полученной посредством блока 40 получения картографической информации. Обработка сравнения выбранных данных о позиции цели с информацией о позиции цели, полученной посредством блока 40 получения картографической информации, является аналогичной обработке первого варианта осуществления, описанной выше.
[0060] Во втором варианте осуществления блок 60 оценки собственной позиции конфигурируется, чтобы выполнять множество сравнений выбранных данных о позиции цели с информацией о позиции цели. Кроме того, будет описан случай, в котором блок 60 оценки собственной позиции конфигурируется, чтобы вычислять множество минимальных погрешностей в соответствующих сравнениях из результатов многочисленных сравнений и оценивать собственную позицию, когда сумма множества минимальных погрешностей равна или больше предварительно определенной пороговой погрешности (например, 1[м]).
Блок 60 оценки собственной позиции, который оценил собственную позицию, выводит сигнал собственной позиции в систему 100 помощи при вождении (см. фиг. 2).
Другая конфигурация, включающая в себя конфигурацию транспортного средства MC, является такой же, что и конфигурация первого варианта осуществления, описанная выше.
[0061] (Работа)
Пример работы, выполняемого с помощью устройства 1 оценки собственной позиции согласно второму варианту осуществления, будет описан со ссылкой на фиг. 8A и фиг. 8B, в то же время обращаясь к фиг. 1-6.
Сначала, обработка этапа S100 выполняется, когда действие, выполняемое с помощью устройства 1 оценки собственной позиции, начинается (НАЧАЛО), как иллюстрировано на фиг. 8A и фиг. 8B.
Обработка с этапа S100 по этап S104 аналогична этапам первого варианта осуществления, описанным выше, и, следовательно, их описания пропускаются.
[0062] На этапе S106 блок 50 оценки позиции начала изгиба определяет, является или нет путь движения, по которому транспортное средство MC движется, участком с изгибом. В результате, обработка определения того, начинает или нет транспортное средство MC двигаться по участку с изгибом ("ОНО НАЧИНАЕТ ДВИГАТЬСЯ ПО ИЗГИБУ?" иллюстрируется на чертеже), выполняется на этапе S106.
Когда определяется, что транспортное средство MC начинает двигаться по участку с изгибом ("ДА" иллюстрируется на чертеже), на этапе S106, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S108.
[0063] Напротив, когда определяется, что транспортное средство MC не начинает двигаться по участку с изгибом ("НЕТ" иллюстрируется на чертеже), на этапе S106, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S122.
На этапе S108 блок 50 оценки позиции начала изгиба оценивает позицию C0 начала изгиба ("ОЦЕНКА ПОЗИЦИИ C0 НАЧАЛА ИЗГИБА" иллюстрируется на чертеже). Когда позиция C0 начала изгиба оценивается на этапе S108, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S200.
[0064] На этапе S200 блок 60 оценки собственной позиции получает результаты множества сравнений выбранных данных о позиции цели с информацией о позиции цели, выполненных в прошлом, с помощью результатов обработки, выполненной в прошлом. Кроме того, среднее значение для множества минимальных погрешностей в соответствующих сравнениях вычисляется из результатов множества сравнений ("ВЫЧИСЛЕНИЕ СРЕДНЕГО ЗНАЧЕНИЯ ПОГРЕШНОСТЕЙ" иллюстрируется на чертеже) на этапе S200. Когда среднее значение для множества минимальных погрешностей во множестве сравнений вычислено на этапе S200, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S202.
На этапе S200 среднее значение S для расстояний Dij вычисляется с помощью уравнения (1) посредством способа, аналогичного способу первого варианта осуществления, описанному выше (см. фиг. 6). Во втором варианте осуществления, однако, выбранные данные Si о позиции цели, используемые для вычисления среднего значения S, ограничиваются выбранными данными Si о позиции цели, присутствующей в области R3 (см. фиг. 5).
[0065] На этапе S202 блок 60 оценки собственной позиции выполняет обработку для определения того, действительно или нет среднее значение для минимальных погрешностей, вычисленное на этапе S200, равно или меньше пороговой погрешности ("СРЕДНЕЕ ЗНАЧЕНИЕ ПОГРЕШНОСТЕЙ РАВНО ИЛИ МЕНЬШЕ ПОРОГОВОЙ ПОГРЕШНОСТИ?" иллюстрируется на чертеже).
Когда определяется, что среднее значение для минимальных погрешностей, вычисленное на этапе S200, равно или меньше пороговой погрешности ("ДА" иллюстрируется на чертеже), на этапе S202, действие, выполняемое с помощью устройства 1 оценки собственной позиции переходит к этапу S114.
Напротив, когда определяется, что среднее значение для минимальных погрешностей, вычисленное на этапе S200, больше порогового значения погрешности ("НЕТ" иллюстрируется на чертеже), на этапе S202, действие, выполняемое с помощью устройства 1 оценки собственной позиции, переходит к этапу S122.
Обработка с этапа S114 по этап S126 аналогична этапам первого варианта осуществления, описанным выше, и, следовательно, их описания пропускаются.
Второй вариант осуществления, описанный выше, является примером настоящего изобретения, настоящее изобретение не ограничивается вторым вариантом осуществления, описанным выше, и различные модификации могут быть выполнены в зависимости от проекта или т.п. без отступления от технической идеи согласно настоящему изобретению, даже если являются формами помимо этого варианта осуществления.
[0066] (Результат второго варианта осуществления)
Устройство 1 оценки собственной позиции согласно второму варианту осуществления может показывать результаты, описанные ниже.
(1) Блок 60 оценки собственной позиции вычисляет, из результатов множества сравнений выбранных данных о позиции цели с информацией о позиции цели, множество минимальных погрешностей в соответствующих сравнениях и оценивает собственную позицию, когда сумма множества минимальных погрешностей равна или больше предварительно заданной пороговой погрешности.
Следовательно, собственная позиция оценивается с помощью данных о позиции цели, присутствующей около транспортного средства MC, и позиции цели, присутствующей между текущей позицией транспортного средства MC и позицией C0 начала изгиба, когда сумма множества минимальных погрешностей равна или больше текущей пороговой погрешности.
В результате, собственная позиция оценивается на основе данных о позиции цели вдоль формы изгиба даже в ситуации, в которой точность оценки продольной позиции транспортного средства MC склонна ухудшаться, и, следовательно, ухудшение точности оценки собственной позиции на пути с изгибом может быть предотвращено.
Список номеров ссылок
[0067] 1: устройство оценки собственной позиции; 2: устройство формирования изображения; 4: устройство измерения расстояния; 6: датчик скорости колеса; 8: датчик угла поворота рулевого колеса; 10: блок обнаружения позиции цели; 20: блок оценки интервала перемещения; 30: блок накопления позиции цели; 40: блок получения картографической информации; 50: блок оценки позиции начала изгиба; 60: блок оценки собственной позиции; 100: система помощи при вождении; MC: транспортное средство; RO: поверхность дороги для движения; W: колесо; C0: позиция начала изгиба; CG: центр тяжести транспортного средства MC; R1: область между позицией C0 начала изгиба и транспортным средством MC; R2: область на расстоянии не более второго порогового расстояния L2 от транспортного средства MC; R3: область на расстоянии не более третьего порогового расстояния L3 от транспортного средства MC; Ei: выбранные данные о позиции цели, относительная позиция которой была обнаружена перед прибытием в позицию C0 начала изгиба в направлении движения транспортного средства MC; Si: выбранные данные о позиции цели, относительная позиция которой была обнаружена между текущей позицией транспортного средства MC и позицией C0 начала изгиба в направлении движения транспортного средства MC; L: расстояние между транспортным средством MC и позицией C0 начала изгиба; L2: второе пороговое расстояние; L3: третье пороговое расстояние; Mj: информация о позиции, которая является ближайшей к одной выбранной части выбранных данных Si о позиции цели, из информации о позиции цели, сохраненной в блоке 40 получения картографической информации; Dij: расстояние между одной выбранной частью выбранных данных Si о позиции цели и информацией Mj о позиции
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство обнаружения трехмерного объекта и способ обнаружения трехмерного объекта
Устройство обнаружения трехмерных объектов
Устройство помощи при вождении и способ обнаружения транспортного средства рядом с ним
Система обнаружения периодических стационарных объектов и способ обнаружения периодических стационарных объектов
Система помощи при вождении и способ определения дождевых капель для нее
Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов
Устройство обнаружения движущихся тел и система обнаружения движущихся тел
Устройство помощи при вождении и способ помощи при вождении
Устройство вычисления собственного положения и способ вычисления собственного положения
Устройство вычисления собственного местоположения и способ вычисления собственного местоположения

