Результат интеллектуальной деятельности: УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТЕЛ И СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТЕЛ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству обнаружения движущихся тел и к системе обнаружения движущихся тел.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В прошлом предлагалось устройство обнаружения помех, оснащенное камерой для формирования изображений окрестностей транспортного средства и предназначенное для того, чтобы преобразовывать изображения, снятые посредством камеры, в изображения с высоты птичьего полета, а также вычислять разность между изображениями с высоты птичьего полета, снятыми в различные моменты времени, обнаруживать трехмерные объекты, окружающие транспортное средство, на основе этих разностей. В этом устройстве обнаружения помех в случаях, в которых трехмерный объект, такой как другое транспортное средство, присутствует в изображениях с высоты птичьего полета, другое транспортное средство становится явным в качестве разности, за счет чего другое транспортное средство или другой трехмерный объект может обнаруживаться на основе этой характеристики (см. патентный документ 1).
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) 2008-227646
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Тем не менее, в случаях, в которых технология, раскрытая в патентном документе 1, применяется к технологии для оценки того, является трехмерный объект движущимся телом или стационарным телом, стационарные тела иногда ошибочно оцениваются в качестве движущихся тел. В частности, в устройстве обнаружения помех, раскрытом в патентном документе 1, в случаях, в которых транспортное средство поворачивает, стационарное тело может отображаться движущимся вследствие этого поворота, что создает вероятность того, что стационарное тело оценивается некорректно в качестве движущегося тела.
[0005] Настоящее изобретение направлено на решение этой проблемы предшествующего уровня техники и имеет цель предоставления устройства обнаружения движущихся тел и способа обнаружения движущихся тел, за счет которых можно повышать точность обнаружения движущихся тел.
[0006] Устройство обнаружения движущихся тел настоящего изобретения подсчитывает число пикселов, которые демонстрируют предварительно определенную разницу, в разностных изображениях для изображений вида с высоты птичьего полета, снятых в различные моменты времени, чтобы добиваться частотного распределения, за счет этого, формируя информацию форм разностных сигналов; и, на основе этой информации форм разностных сигналов, обнаруживает трехмерные объекты, присутствующие в предварительно определенной области, а также вычисляет скорость движения трехмерных объектов из временного варьирования формы сигнала в информации форм разностных сигналов. Затем, на основе скорости движения трехмерных объектов, обнаруживается то, являются или нет трехмерные объекты движущимися телами. Кроме того, устройство обнаружения движущихся тел обнаруживает поворот транспортного средства, и в случаях, в которых определено, что транспортное средство поворачивает, обнаружение трехмерных объектов на основе информации форм разностных сигналов и обнаружение трехмерных объектов в качестве движущихся тел запрещается по сравнению со случаями, в которых транспортное средство не поворачивает.
[0007] Согласно настоящему изобретению, в случаях, в которых определено, что транспортное средство поворачивает, чувствительность обнаружения для движущихся тел уменьшается по сравнению со случаями, в которых транспортное средство не поворачивает. Следовательно, даже когда транспортное средство поворачивает, что приводит к тому, что стационарные объекты отображаются движущимися в изображениях, может предотвращаться ошибочная оценка стационарных объектов в качестве движущихся тел вследствие сниженной точности оценки движущихся тел. Следовательно, может повышаться точность оценки движущихся тел.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг.1 является упрощенным схематичным видом устройства обнаружения движущихся тел согласно настоящему варианту осуществления, показывающим пример случая, в котором устройство обнаружения движущихся тел устанавливается на транспортном средстве.
Фиг.2 является видом сверху, показывающим транспортное средство, показанное на Фиг.1, показанное при движении.
Фиг.3 является блок-схемой, показывающей подробности компьютера, показанного на Фиг.1.
Фиг.4 является видом сверху, показывающим общее представление обработки посредством модуля формирования разностных изображений, показанного на Фиг.3, при этом (a) показывает транспортные средства в движении, а (b) показывает общее представление позиционного совмещения.
Фиг.5 является упрощенной схемой, показывающей формирование формы разностного сигнала посредством модуля формирования форм разностных сигналов, показанного на Фиг.3.
Фиг.6 является схемой, показывающей примеры форм разностных сигналов, сформированных посредством модуля формирования форм разностных сигналов, показанного на Фиг.3, при этом (a) показывает пример формы разностного сигнала, полученной во время движения вперед по прямой транспортного средства, а (b)-(e) показывают примеры форм разностных сигналов, полученных во время поворота транспортного средства, причем (c) показывает первый пример сниженной чувствительности обнаружения для движущихся тел, (d) показывает второй пример сниженной чувствительности обнаружения для движущихся тел, и (e) показывает третий пример сниженной чувствительности обнаружения для движущихся тел.
Фиг.7 является блок-схемой последовательности операций способа, показывающей способ обнаружения движущихся тел, согласно настоящему варианту осуществления.
Фиг.8 является блок-схемой, показывающей подробности компьютера, согласно второму варианту осуществления.
Фиг.9 является блок-схемой, показывающей подробности компьютера, согласно третьему варианту осуществления.
Фиг.10 является видом сверху транспортного средства, показывающим общее представление работы устройства обнаружения движущихся тел, согласно третьему варианту осуществления, и показывающим транспортное средство по мере того, как оно движется через участок дороги с круговым движением.
Фиг.11 является графиком, показывающим кривизну поворота в ходе движения через участок дороги с круговым движением, показанный на Фиг.10.
Фиг.12 является графиком, показывающим чувствительность при движении через участок дороги с круговым движением, показанный на Фиг.10, при этом (a) показывает сравнительный пример, а (b) показывает состояние чувствительности устройства обнаружения движущихся тел, согласно третьему варианту осуществления.
Фиг.13 является блок-схемой последовательности операций способа, показывающей способ обнаружения движущихся тел, согласно третьему варианту осуществления.
Фиг.14 является блок-схемой, показывающей подробности компьютера, согласно четвертому варианту осуществления.
Фиг.15 является схемой, описывающей работу модуля вычисления яркостного различия, согласно четвертому варианту осуществления, при этом (a) является схемой, показывающей позиционные взаимосвязи линии интереса, опорной линии, точки интереса и опорной точки в изображении вида с высоты птичьего полета, а (b) является схемой, показывающей позиционные взаимосвязи линии интереса, опорной линии, точки интереса и опорной точки в реальном пространстве.
Фиг.16 является схемой, описывающей подробную работу модуля вычисления разности яркости, согласно четвертому варианту осуществления, при этом (a) является схемой, показывающей область обнаружения в изображении вида с высоты птичьего полета, а (b) является схемой, показывающей позиционные взаимосвязи линии интереса, опорной линии, точки интереса и опорной точки в изображении вида с высоты птичьего полета.
Фиг.17 является схемой, описывающей способ формирования формы разностного сигнала края посредством модуля формирования форм сигналов краев.
Фиг.18 является блок-схемой последовательности операций способа, показывающей способ обнаружения движущихся тел, согласно четвертому варианту осуществления.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] Предпочтительные варианты осуществления настоящего изобретения описываются ниже на основе чертежей. Фиг.1 является упрощенным схематичным видом устройства 1 обнаружения движущихся тел, согласно настоящему варианту осуществления, показывающим пример случая, в котором устройство 1 обнаружения движущихся тел устанавливается на транспортном средстве V. Устройство 1 обнаружения движущихся тел, показанное на Фиг.1, представляет водителю транспортного средства V информацию различных типов из результатов формирования изображений окрестностей транспортного средства V и содержит камеру 10 (средство формирования изображений), датчик 20 и компьютер 30.
[0010] Камера 10, показанная на Фиг.1, прикрепляется в таком месте на высоте h в задней части транспортного средства V, что оптическая ось ориентирована вниз под углом θ от горизонтали. Камера 10 спроектирована с возможностью снимать области обнаружения из этой позиции. Датчик 20 содержит, например, датчик скорости транспортного средства для обнаружения скорости движения транспортного средства V и датчик угла поворота при рулении для обнаружения управляющего ввода на рулевое колесо. На основе изображений, снятых посредством камеры 10, компьютер 30 обнаруживает движущиеся тела (например, другие транспортные средства, мотоциклы и т.п.), присутствующие сзади транспортного средства V.
[0011] Устройство обнаружения движущихся тел дополнительно содержит предупреждающее устройство (не проиллюстрировано) для выдачи предупреждений водителю транспортного средства V в случаях, если имеется вероятность вхождения в контакт движущегося тела, обнаруженного посредством компьютера 30, с транспортным средством V и т.п.
[0012] Фиг.2 является видом сверху, показывающим транспортное средство, показанное на Фиг.1, показанное при движении. Как показано на Фиг.2, камера 10 допускает формирование изображений сзади транспортного средства V. Области A1, A2 обнаружения (предварительно определенные области), предназначенные для обнаружения других транспортных средств и других таких движущихся тел, устанавливаются в полосах движения, смежных с полосой движения, по которой движется транспортное средство V, и компьютер 30 обнаруживает то, присутствуют или нет движущиеся тела в областях A1, A2 обнаружения. Эти области A1, A2 обнаружения устанавливаются из относительных позиций относительно транспортного средства V. Области A1, A2 обнаружения могут устанавливаться в смежных полосах движения посредством использования технологии автоматического распознавания разметки полос движения и т.п.
[0013] Фиг.3 является блок-схемой, показывающей подробности компьютера 30, показанного на Фиг.1. На Фиг.3, также проиллюстрированы камера 10 и датчик 20 для того, чтобы прояснять взаимосвязи соединений. Как следует понимать из Фиг.3, датчик 20 сконструирован посредством датчика 21 скорости транспортного средства и датчика 22 угла поворота при рулении; тем не менее, ограничений на это нет, и также могут быть дополнительно предоставлены другие датчики.
[0014] Как показано на Фиг.3, компьютер 30 содержит модуль 31 преобразования точки наблюдения, модуль 32 формирования разностных изображений (средство формирования разностных изображений), модуль 33 формирования форм разностных сигналов (средство формирования форм разностных сигналов) и модуль 34 обнаружения движущихся тел (средство обнаружения движущихся тел).
[0015] Модуль 31 преобразования точки наблюдения вводит захваченные данные изображений, полученные посредством формирования изображений посредством камеры 10 и включающие в себя области A1, A2 обнаружения, и выполняет преобразование точки наблюдения в данные изображений с высоты птичьего полета для входных захваченных данных изображений, как они должны быть видны в состоянии просмотра с высоты птичьего полета. Это состояние просмотра с высоты птичьего полета означает состояние при просмотре с точки наблюдения гипотетической камеры, которая, например, смотрит вертикально вниз сверху в воздухе. Такое преобразование точки наблюдения выполняется способом, раскрытым, например, в выложенной заявке на патент (Япония) 2008-219063.
[0016] Модуль 32 формирования разностных изображений последовательно вводит данные изображений с высоты птичьего полета, полученные посредством преобразования точки наблюдения посредством модуля 31 преобразования точки наблюдения, и совмещает позиции входных данных изображений с высоты птичьего полета, снятых в различные моменты времени. Фиг.4 является видом сверху, показывающим общее представление обработки посредством модуля 32 формирования разностных изображений, показанного на Фиг.3, при этом (a) показывает транспортные средства V в движении, а (b) показывает общее представление позиционного совмещения.
[0017] Допустим, что, как показано на Фиг.4(a), в текущее время транспортное средство V спозиционировано в V1, тогда как в непосредственно предшествующий момент времени транспортное средство V было спозиционировано в V2. Также допустим, что другое транспортное средство V спозиционировано по направлению сзади от транспортного средства V и движется параллельно транспортному средству V, и что в текущее время это другое транспортное средство V спозиционировано в V3, тогда как в непосредственно предшествующий момент времени другое транспортное средство V было спозиционировано в V4. Дополнительно допустим, что с непосредственно предшествующего момента времени транспортное средство V движется на расстояние d. "Непосредственно предшествующий момент времени" может означать предыдущий момент времени, предшествующий текущему времени, согласно предварительно определенной длительности (например, одному циклу управления), и может быть предыдущим моментом времени любой длительности, предшествующим текущему.
[0018] В этом состоянии изображение PBt с высоты птичьего полета в текущий момент времени является таким, как показано на Фиг.4(b). В этом изображении PBt с высоты птичьего полета разметка полос движения, нанесенная на поверхности дороги, отображается в прямоугольной форме, относительно точно отражая состояние при просмотре сверху. Тем не менее, для другого транспортного средства V3 реализуется наблюдение в перспективном ракурсе. Аналогично, в изображении PBt-1 с высоты птичьего полета, снятом в непосредственно предшествующий момент времени, разметка полос движения, нанесенная на поверхности дороги, отображается в прямоугольной форме, относительно точно отражая состояние при просмотре сверху, но для другого транспортного средства V4 реализуется наблюдение в перспективном ракурсе.
[0019] Модуль 32 формирования разностных изображений выполняет позиционное совмещение вышеописанных изображений PBt, PBt-1 с высоты птичьего полета по данным. В это время, модуль 32 формирования разностных изображений смещает изображение PBt-1 с высоты птичьего полета, снятое в непосредственно предшествующий момент времени, сопоставляя его по позиции с изображением PBt с высоты птичьего полета в текущее время. Величина смещения d' является величиной, эквивалентной проезжаемому расстоянию d, показанному на Фиг.4(a), и определяется на основе сигнала из датчика скорости 20 и длительности от непосредственно предшествующего момента времени до текущего момента времени.
[0020] В настоящем варианте осуществления, модуль 32 формирования разностных изображений выполняет позиционное совмещение, в виде с высоты птичьего полета, позиций изображений с высоты птичьего полета, снятых в различные моменты времени, получая изображение с высоты птичьего полета, в котором позиции совмещены. Этот процесс "позиционного совмещения" может быть выполнен на уровне точности, согласно классу обнаруживаемого объекта и требуемой точности обнаружения. Например, процесс может быть строгим процессом позиционного совмещения позиции, заключающим в себе совмещение на основе данного момента времени и данной позиции; или менее строгим процессом позиционного совмещения, заключающим в себе просто выявление координат изображений вида с высоты птичьего полета.
[0021] После позиционного совмещения, модуль 32 формирования разностных изображений вычисляет разность, которая должна быть ассоциирована с каждым пикселом изображений PBt, PBt-1 с высоты птичьего полета, и извлекает те пикселы, для которых абсолютное значение вышеуказанной разности равно или превышает предварительно определенное значение, указывая их в качестве разностных пикселов. Модуль 32 формирования разностных изображений затем формирует разностное изображение PDt из этих разностных пикселов.
[0022] Следует обратиться снова к Фиг.3. Модуль 33 формирования форм разностных сигналов формирует форму разностного сигнала на основе данных разностных изображений PDt, сформированных посредством модуля 32 формирования разностных изображений.
[0023] Фиг.5 является упрощенной схемой, показывающей формирование формы разностного сигнала посредством модуля 33 формирования форм разностных сигналов, показанного на Фиг.3. Как показано на Фиг.5, из секций, соответствующих областям A1, A2 обнаружения в пределах разностного изображения PDt, модуль 33 формирования форм разностных сигналов формирует форму DWt разностного сигнала. В это время, модуль 33 формирования форм разностных сигналов формирует форму DWt разностного сигнала вдоль направления перспективного ракурса трехмерных объектов вследствие преобразования точки наблюдения. В примере по Фиг.5, для удобства описание использует только область A1 обнаружения.
[0024] Если более конкретно, во-первых, модуль 33 формирования форм разностных сигналов задает линию La, находящуюся в направлении перспективного ракурса трехмерных объектов в данных форм DWt разностных сигналов. Модуль 33 формирования форм разностных сигналов затем подсчитывает число разностных пикселов DP, показывающих предварительно определенную разницу, которые находятся на линии La. Здесь, в случаях, в которых пикселные значения формы DWt разностного сигнала являются абсолютными значениями разностей пикселных значений между изображениями PBt, PBt-1 с высоты птичьего полета, разностные пикселы DP являются пикселами, которые превышают предварительно определенное значение; или в случаях, в которых пикселные значения формы DWt разностного сигнала представляются посредством нулей и единиц, являются пикселами, имеющими значение "1".
[0025] После подсчета числа разностных пикселов DP модуль 33a формирования форм разностных сигналов находит точку CP пересечения линии La и линии L1. Затем модуль 33 формирования форм разностных сигналов, при ассоциировании точки CP пересечения и подсчитанного числа, определяет позицию на горизонтальной оси (позицию на оси в вертикальном направлении в плоскости страницы на Фиг.5) на основе позиции точки CP и определяет позицию на вертикальной оси (позицию на оси поперечного направления в плоскости страницы на Фиг.5) из подсчитанного числа.
[0026] Затем, аналогичным образом, модуль 33 формирования форм разностных сигналов задает линию, находящуюся в направлении перспективного ракурса трехмерных объектов, подсчитывает число разностных пикселов DP, определяет позицию на горизонтальной оси на основе позиции точки CP пересечения и определяет позицию на вертикальной оси из подсчитанного числа (числа разностных пикселов DP). Модуль 33 формирования форм разностных сигналов последовательно повторяет вышеописанный процесс, чтобы добиваться частотного распределения, и формирует форму DWt разностного сигнала.
[0027] Как показано на Фиг.5, линии La и Lb, находящиеся в направлении перспективного ракурса трехмерных объектов, отличаются с точки зрения расстояния, на которое они перекрывают область A1 обнаружения. Следовательно, если область A1 обнаружения поддерживается заполненной разностными пикселами DP, число разностных пикселов DP на линии La должно превышать число разностных пикселов DP на линии Lb. Следовательно, в случаях определения позиции на вертикальной оси из подсчитанного числа разностных пикселов DP, модуль 33 формирования форм разностных сигналов выполняет нормализацию на основе расстояния перекрытия области A1 обнаружения и линий La и Lb в направлении перспективного ракурса трехмерных объектов. В качестве конкретного примера, на Фиг.5 предусмотрено шесть разностных пикселов DP, находящихся на линии La, и пять разностных пикселах DP, находящихся на линии Lb. Следовательно, при определении позиции на вертикальной оси из подсчитанного числа на Фиг.5, модуль 33 формирования форм разностных сигналов выполняет нормализацию посредством деления подсчитанного числа на расстояние перекрытия или другого такого способа. Таким образом, как показано посредством формы DWt разностного сигнала, значения формы DWt разностного сигнала, соответствующей линиям La и Lb в направлении перспективного ракурса трехмерных объектов, допускают практически равные значения.
[0028] Модуль 34 обнаружения движущихся тел обнаруживает движущиеся тела на основе данных форм DWt разностных сигналов, к примеру, как показано на Фиг.5. В ходе обнаружения движущегося тела этот модуль 34 обнаружения движущихся тел сначала выполняет процесс обработки пороговых значений. Конкретнее, модуль 34 обнаружения движущихся тел сравнивает среднее значение формы DWt разностного сигнала с предварительно определенным пороговым значением, и если среднее значение равно или превышает пороговое значение, определяет то, что объект возможно является движущимся телом. С другой стороны, если среднее значение не равно или превышает пороговое значение, модуль 34 обнаружения движущихся тел определяет то, что отсутствует вероятность того, что объект является движущимся телом. Здесь, в случаях, в которых форма DWt разностного сигнала обусловлена искажением, маловероятно, что среднее значение равно или превышает пороговое значение. Следовательно, модуль 34 обнаружения движущихся тел сначала выполняет процесс обработки пороговых значений и выполняет определение в отношении вероятности движущегося тела. Тем не менее, модуль 34 обнаружения движущихся тел не ограничен этим и вместо этого, например, может определять то, что объект возможно является движущимся телом в случаях, в которых отношение площади поверхности, равное или превышающее предварительно определенное пороговое значение в форме DWt разностного сигнала, равно или превышает предварительно определенное отношение, или в ином случае определяет то, что отсутствует вероятность представления объекта как движущегося тела.
[0029] После того, как модуль 34 обнаружения движущихся тел определяет то, что трехмерный объект, указываемый посредством формы DWt разностного сигнала, возможно является движущимся телом, форма DWt-1 разностного сигнала непосредственно предшествующего момента времени и эта форма DWt разностного сигнала ассоциируются, и за счет этого вычисляется оцененная скорость движущегося тела. Например, в случае, если трехмерный объект является другим транспортным средством V, разностные пикселы DP легко получаются в секциях шин другого транспортного средства V, и, следовательно, форма DWt разностного сигнала легко стремится иметь два максимальных значения. Следовательно, посредством извлечения отклонения между максимальными значениями формы DWt-1 разностного сигнала непосредственно предшествующего момента времени и этой формы DWt разностного сигнала может извлекаться относительная скорость другого транспортного средства V относительно транспортного средства V. Таким образом, модуль 34 обнаружения движущихся тел извлекает оцененную скорость трехмерного объекта. Затем, на основе оцененной скорости, модуль 34 обнаружения движущихся тел определяет то, является трехмерный объект, представленный посредством формы DWt разностного сигнала, движущимся телом или стационарным телом.
[0030] Компьютер 30 дополнительно содержит модуль 35 обнаружения поворотов (средство обнаружения поворотов) и модуль 36 задания чувствительности (средство задания чувствительности). Модуль 35 обнаружения поворотов обнаруживает поворот транспортного средства V, обнаруживая поворот транспортного средства из угла поворота при рулении, обнаруженного посредством датчика 22 угла поворота при рулении. Модуль 36 задания чувствительности варьирует чувствительность обнаружения для движущихся тел посредством модуля 34 обнаружения движущихся тел. Вместо базирования на угле поворота при рулении, модуль 35 обнаружения поворотов, наоборот, может выполнять определение в отношении того, проезжается или нет поворот в данный момент, на основе навигации и т.п.
[0031] Фиг.6 является схемой, показывающей примеры форм DWt разностных сигналов, сформированных посредством модуля 33 формирования форм разностных сигналов, показанного на Фиг.3, при этом (a) показывает пример формы DWt разностного сигнала, полученной во время движения вперед по прямой транспортного средства, а (b)-(e) показывают примеры DW форм разностных сигналов, полученных во время поворота транспортного средства, причем (c) показывает первый пример сниженной чувствительности обнаружения для движущихся тел, (d) показывает второй пример сниженной чувствительности обнаружения для движущихся тел, и (e) показывает третий пример сниженной чувствительности обнаружения для движущихся тел.
[0032] Во-первых, допустим, что получена форма DWt разностного сигнала, к примеру, как показано на Фиг.6(a). В это время, модуль 34 обнаружения движущихся тел выполняет пороговый процесс, к примеру, как описано выше. В примере, показанном на Фиг.6(a), среднее значение формы DWt разностного сигнала не равно или превышает пороговое значение TH. Следовательно, модуль 34 обнаружения движущихся тел определяет то, что форма DWt разностного сигнала не является формой DWt разностного сигнала движущегося тела и обусловлена, например, искажением (в частности, стационарными телами со сложной текстурой, такими как травяное покрытие, стены и т.п.).
[0033] Тем не менее, когда транспортное средство V поворачивает, форма DWt разностного сигнала стремится становиться большей по размеру, как показано на Фиг.6(b). Причина состоит в том, что в результате поворота стационарные тела появляются в изображениях так, как будто они движутся, упрощая получение разностей. В частности, в примере, показанном на Фиг.6(b), среднее значение формы DWt разностного сигнала равно или превышает пороговое значение TH. Следовательно, стационарные тела достаточно просто распознаются некорректно в качестве движущихся тел.
[0034] Соответственно, модуль 36 задания чувствительности уменьшает чувствительность обнаружения движущихся тел во время поворота. Конкретнее, модуль 36 задания чувствительности повышает предварительно определенное пороговое значение TH способом, показанным на Фиг.6(b) (пороговое значение до варьирования показывается посредством TH'). Таким образом, среднее значение формы DWt разностного сигнала более не равно или превышает пороговое значение TH, что делает очень небольшой вероятность того, что модуль 34 обнаружения движущихся тел некорректно распознает стационарное тело в качестве движущегося тела.
[0035] Кроме того, предпочтительно, чтобы модуль 36 задания чувствительности повышал пороговое значение TH способом, показанным на Фиг.6(c) или Фиг.6(d). В частности, модуль 36 задания чувствительности повышает пороговое значение TH, соответствующее задней стороне транспортного средства V, в большей степени, чем пороговое значение TH, соответствующее передней стороне транспортного средства V. Устройство 1 обнаружения движущихся тел, согласно настоящему варианту осуществления, спроектировано с возможностью обнаруживать движущиеся тела сзади транспортного средства V, и, следовательно, при повороте, разности в захваченных изображениях стремятся быть больше в направлении задней стороны, чем в направлении передней стороны транспортного средства. Соответственно, посредством повышения порогового значения TH, соответствующего задней стороне транспортного средства V, способом, описанным выше, пороговое значение TH может задаваться надлежащим образом, и может еще дополнительно повышаться точность обнаружения движущихся тел.
[0036] В таких случаях, модуль 34 обнаружения движущихся тел может задавать линейное пороговое значение TH, как показано на Фиг.6(c), или задавать ступенчатое пороговое значение TH, как показано на Фиг.6(d).
[0037] Дополнительно, модуль 36 задания чувствительности обнаруживает поворот посредством обнаружения угла поворота при рулении, обнаруженного посредством датчика 22 угла поворота при рулении, и при больших углах поворота при рулении понижает чувствительность обнаружения движущихся тел посредством модуля 34 обнаружения движущихся тел. Причина состоит в том, что более резкий поворот формирует большее явное движение стационарных тел в изображениях, еще более упрощая получение разности. Конкретнее, при больших углах поворота при рулении, модуль 36 задания чувствительности повышает предварительно определенное пороговое значение TH, как показано на Фиг.6(e). В частности, когда сравниваются пример, показанный на Фиг.6(e), и пример, показанный на Фиг.6(b), видно, что пороговое значение TH, показанное на Фиг.6(e), является более высоким. Посредством повышения порогового значения TH при больших углах поворота при рулении модуль 36 задания чувствительности может задавать пороговые значения еще более надлежащим способом.
[0038] Модуль 36 задания чувствительности может уменьшать чувствительность с учетом поперечной G-силы, позиции акселератора и операции торможения, рассматриваемых в дополнение к углу поворота при рулении. Например, когда происходит движение в продольном направлении вследствие операции торможения или варьирования позиции акселератора, форма DWt разностного сигнала стремится становиться большей еще более простым образом. Аналогично, с варьированиями поперечной G-силы, форма DWt разностного сигнала стремится становиться большей еще более простым образом.
[0039] Далее описывается способ обнаружения движущихся тел, согласно настоящему варианту осуществления. Фиг.7 является блок-схемой последовательности операций способа, показывающей способ обнаружения движущихся тел, согласно настоящему варианту осуществления. Как показано на Фиг.7, во-первых, компьютер 30 обнаруживает скорость транспортного средства на основе сигнала из датчика 20 скорости транспортного средства (S1).
[0040] Затем, на основе сигнала из датчика скорости транспортного средства 22, модуль обнаружения поворотов 36 определяет то, поворачивает или нет транспортное средство V (S2). В случае определения того, что транспортное средство V не поворачивает (S2: "Нет"), процесс переходит к этапу S43.
[0041] С другой стороны, в случае определения того, что транспортное средство V поворачивает (S2: "Да"), модуль 36 задания чувствительности, действуя на основе абсолютной величины угла поворота при рулении, задает целевое значение порогового значения TH (S3). Затем, модуль 34 обнаружения движущихся тел определяет то, обнаруживаются или нет движущиеся тела в данный момент (S4).
[0042] В случае определения того, что движущееся тело в данный момент обнаруживается (S4: "Да"), модуль 36 задания чувствительности задает первое предельное значение (предельное значение, служащее в качестве верхнего предела) в отношении величины варьирования при варьировании чувствительности (S5). Процесс затем переходит к этапу S7. С другой стороны, в случае определения того, что движущееся тело в данный момент не обнаруживается (S4: "Нет"), модуль 33b задания областей задает предельное значение равным второму предельному значению (S6). Процесс затем переходит к этапу S7. Здесь, первое предельное значение меньше второго предельного значения. Следовательно, может предотвращаться ситуация, в которой пороговое значение внезапно варьируется в ходе обнаружения движущихся тел, так что движущиеся тела более не могут обнаруживаться.
[0043] Затем, модуль 36 задания чувствительности варьирует пороговое значение TH (S7). В частности, модуль 36 задания чувствительности варьирует пороговое значение TH в диапазоне, который не превышает предельное значение, которое задано на этапе S5 или S6, чтобы обеспечивать аппроксимацию значения с целевым значением, которое извлечено на этапе S3.
[0044] После этого, модуль 32 формирования разностных изображений обнаруживает разности (S8). В это время, модуль 32 формирования разностных изображений формирует данные PDt разностных изображений таким способом, который описан со ссылкой на Фиг.4.
[0045] Затем, на основе данных PDt разностных изображений, сформированных на этапе S8, модуль 33 формирования форм разностных сигналов формирует форму DWt разностного сигнала способом, описанным выше со ссылкой на Фиг.5 (S9). Модуль 34 обнаружения движущихся тел затем ассоциирует форму DWt-1 разностного сигнала непосредственно предшествующего момента времени и эту форму DWt разностного сигнала и за счет этого вычисляет оцененную скорость трехмерного объекта (S10).
[0046] После этого, модуль 34 обнаружения движущихся тел определяет то, является или нет оцененная скорость, которая вычислена на этапе 10, скоростью, которая предназначена для обнаружения (S11). Устройство 1 обнаружения движущихся тел настоящего варианта осуществления спроектировано с возможностью обнаруживать другие транспортные средства, мотоциклы и т.п., с которыми имеется вероятность контакта во время смены полосы движения. Следовательно, модуль 34 обнаружения движущихся тел определяет то, является или нет оцененная скорость на этапе S11 надлежащей скоростью для другого транспортного средства, мотоцикла и т.п.
[0047] В случае определения того, что оцененная скорость является надлежащей для другого транспортного средства, мотоцикла и т.п. (S11: "Да"), модуль 34 обнаружения движущихся тел определяет то, что трехмерный объект, представленный посредством формы DWt разностного сигнала, является движущимся телом, предназначенным для обнаружения (т.е. другим транспортным средством, мотоциклом и т.п.) (S12). Процесс, показанный на Фиг.7, после этого завершается. С другой стороны, в случае определения того, что оцененная скорость не является скоростью, подходящей для другого транспортного средства, мотоцикла и т.п. (S11: "Нет"), модуль 33 обнаружения движущихся тел определяет то, что трехмерный объект, представленный посредством формы DWt разностного сигнала, не является движущимся телом, предназначенным для обнаружения, и процесс, показанный на Фиг.7, завершается.
[0048] Вышеуказанным способом, в устройстве 1 обнаружения движущихся тел и способе обнаружения движущихся тел, согласно настоящему варианту осуществления, в случаях, в которых обнаружен поворот транспортного средства V, чувствительность обнаружения движущихся тел понижается по сравнению со случаями, в которых транспортное средство V не поворачивает. Следовательно, несмотря на то, что стационарные тела в изображениях выглядят движущимися, когда транспортное средство V поворачивает, поскольку чувствительность определения относительно движущихся тел понижена, стационарные тела не оцениваются ошибочно в качестве движущихся тел. Следовательно, может повышаться точность обнаружения движущихся тел.
[0049] Кроме того, в случаях, в которых обнаружен поворот транспортного средства V, предварительно определенное пороговое значение TH повышается по сравнению со случаями, в которых транспортное средство V не поворачивает, тем самым понижая чувствительность обнаружения движущихся тел. Следовательно, несмотря на то, что стационарные тела в изображениях выглядят движущимися по мере того как транспортное средство V поворачивает и что формы разностных сигналов представляются большими, несмотря на ассоциирование со стационарными объектами, вследствие повышенного порогового значения TH маловероятно, что такие объекты определяются в качестве движущихся тел.
[0050] Кроме того, поскольку пороговое значение TH, соответствующее задней стороне транспортного средства, задается равным значению, превышающему пороговое значение TH, соответствующее передней стороне транспортного средства, в условиях (к примеру, условиях, встречающихся при повороте), в которых форма DWt разностного сигнала в задней стороне транспортного средства имеет тенденцию представляться больше, чем форма DWt разностного сигнала в передней стороне транспортного средства, задается надлежащее пороговое значение TH, и может еще дополнительно повышаться точность обнаружения движущихся тел.
[0051] Кроме того, поскольку чувствительность обнаружения для движущихся тел понижается при больших углах поворота при рулении, даже в условиях, в которых угол поворота при рулении является большим и стационарные тела имеют тенденцию выглядеть движущимися в еще большей степени в изображениях, чувствительность определения относительно движущихся тел понижена, и, следовательно, можно дополнительно предотвращать ошибочную оценку стационарных тел в качестве движущихся тел.
[0052] Кроме того, поскольку величина снижения чувствительности меньше в ходе обнаружения движущегося тела, чем величина снижения чувствительности в ходе необнаружения движущегося тела, можно уменьшать частоту существенных уменьшений чувствительности в ходе обнаружения движущегося тела, что может приводить к пропускам при обнаружении движущихся тел.
[0053] Далее поясняется второй вариант осуществления настоящего изобретения. Устройство обнаружения движущихся тел и способ обнаружения движущихся тел, согласно второму варианту осуществления, являются аналогичными устройству обнаружения движущихся тел и способу обнаружения движущихся тел из первого варианта осуществления, но с некоторыми отличиями по конфигурации и по содержимому процесса. Ниже описываются отличия от первого варианта осуществления.
[0054] Фиг.8 является блок-схемой, показывающей подробности компьютера 30, согласно второму варианту осуществления. На Фиг.8, также проиллюстрированы камера 10 и датчик 20 для того, чтобы прояснять взаимосвязи соединений.
[0055] Как показано на Фиг.8, компьютер 30, согласно второму варианту осуществления, спроектирован с возможностью управлять модулем 32 формирования разностных изображений таким образом, чтобы понижать чувствительность обнаружения для движущихся тел посредством модуля 34 обнаружения движущихся тел. Как описано выше, модуль 32 формирования разностных изображений выполняет, для данных, позиционное совмещение изображений PBt, PBt-1 с высоты птичьего полета, снятых в различные моменты времени, вычисляет разности и извлекает те пикселы, для которых абсолютное значение вышеуказанной разности равно или превышает предварительно определенное значение, в качестве разностных пикселов DP. Во втором варианте осуществления, модуль 36 задания чувствительности затрудняет извлечение разностных пикселов DP, например, посредством увеличения вышеуказанного значения таким образом, чтобы управлять формой DWt разностного сигнала до меньшего размера без изменения порогового значения TH. Если конкретнее, тогда как обычно модуль 32 формирования разностных изображений извлекает разностные пикселы DP при яркостном различии в "5" в определенных состояниях поворачивания, это изменяется таким образом, что разностные пикселы DP извлекаются при яркостном различии, например, в "20". Таким образом, результат заключается в том, что чувствительность обнаружения для движущихся тел посредством модуля 34 обнаружения движущихся тел является более низкой. На вышеописанную компоновку ограничений нет, и модуль 33 формирования форм разностных сигналов, после формирования формы разностного сигнала, затем может просто сжимать форму DWt разностного сигнала в направлении высоты таким образом, чтобы управлять формой DWt разностного сигнала до меньшего размера.
[0056] Далее описывается способ обнаружения движущихся тел, согласно второму варианту осуществления. Способ обнаружения движущихся тел, согласно второму варианту осуществления, является аналогичным способу обнаружения движущихся тел первого варианта осуществления за исключением того, что на этапе S3 вместо задания целевого значения для порогового значения TH, задается целевое значение для предварительно определенного значения для извлечения разностных пикселов DP. Дополнительно, на этапе S7, варьируется предварительно определенное значение вместо варьирования порогового значения TH. Другие процессы являются идентичными процессам из первого варианта осуществления.
[0057] Таким образом, в устройстве 2 обнаружения движущихся тел и способе обнаружения движущихся тел, согласно второму варианту осуществления, может повышаться точность обнаружения движущихся тел, аналогично первому варианту осуществления.
[0058] Кроме того, согласно второму варианту осуществления, чувствительность обнаружения для движущихся тел уменьшается посредством приспособления большего предварительно определенного значения для обнаружения разностных пикселов DP в случаях, в которых обнаруживается поворот транспортного средства V, по сравнению со случаями, в которых транспортное средство V не поворачивает. Следовательно, сами разностные пикселы DP труднее обнаруживать, и форма DWt разностного сигнала представляется меньшей, так что может предотвращаться ошибочная оценка в качестве движущихся тел.
[0059] Далее описывается третий вариант осуществления изобретения. Устройство обнаружения движущихся тел и способ обнаружения движущихся тел, согласно третьему варианту осуществления, являются аналогичными устройству обнаружения движущихся тел и способу обнаружения движущихся тел из первого варианта осуществления, но с некоторыми отличиями по конфигурации и по содержимому процесса. Ниже описываются отличия от первого варианта осуществления.
[0060] Фиг.9 является блок-схемой, показывающей подробности компьютера 30, согласно второму варианту осуществления. На Фиг.9, также проиллюстрированы камера 10 и датчик 20 для того, чтобы прояснять взаимосвязи соединений.
[0061] Как показано на Фиг.9, компьютер 30 содержит модуль 37 обнаружения смены полосы движения (средство обнаружения смены полосы движения). Модуль 37 обнаружения смены полосы движения спроектирован с возможностью обнаруживать смены полосы движения транспортным средством V. Конкретнее, модуль 37 обнаружения смены полосы движения обнаруживает смену полосы движения транспортным средством V посредством обнаружения операции включения сигнала поворота водителем. Способ обнаружения смены полосы движения не ограничивается этим; смены полосы движения вместо этого могут обнаруживаться, например, посредством определения, на основе данных изображений, захваченных посредством камеры 10, того, что транспортное средство V движется поперечно; или смены полосы движения могут обнаруживаться из комбинации сигнала из датчика 22 угла поворота при рулении и сигнала из датчика поперечной G-силы.
[0062] Фиг.10 является видом сверху транспортного средства, показывающим общее представление работы 3 устройства обнаружения движущихся тел, согласно третьему варианту осуществления, и показывающим транспортное средство V по мере того, как оно движется через участок дороги с круговым движением. Как показано на Фиг.10, когда транспортное средство V подъезжает к участку дороги с круговым движением, водитель немного поворачивает руль в направлении вправо вследствие потока трафика по часовой стрелке через участок дороги с круговым движением. После этого, транспортное средство V достигает позиции P, показанной на Фиг.10. В это время, в начале выезда с участка дороги с круговым движением, водитель включает сигнал левого поворота, а также поворачивает руль в направлении влево. Транспортное средство V затем выезжает из участка дороги с круговым движением.
[0063] Фиг.11 является графиком, показывающим кривизну поворота в ходе движения через участок дороги с круговым движением, показанный на Фиг.10. Как описано со ссылкой на Фиг.10, во-первых, при въезде на участок дороги с круговым движением, водитель транспортного средства V поворачивает руль в направлении вправо, и, следовательно, от времени t1 до t2, кривизна поворота в направлении вправо увеличивается. Затем, от времени t2, кривизна поворота поддерживает постоянное значение. Затем, во время t3, чтобы выезжать из участка дороги с круговым движением, водитель включает сигнал левого поворота и поворачивает руль в левую сторону. Таким образом, начиная со времени t4, кривизна поворота первоначально становится нулевой, а затем кривизна поворота в направлении влево увеличивается до времени t5. Затем, когда водитель выезжает из участка дороги с круговым движением, руль начинает возвращаться в исходную позицию, и, следовательно, кривизна поворота уменьшается, начиная со времени t6.
[0064] Фиг.12 является графиком, показывающим чувствительность при движении через участок дороги с круговым движением, показанный на Фиг.10, при этом (a) показывает сравнительный пример, а (b) показывает состояние чувствительности устройства 3 обнаружения движущихся тел, согласно третьему варианту осуществления. На Фиг.12(a), изменение чувствительности устройства 1 обнаружения движущихся тел, согласно первому варианту осуществления, описывается посредством сравнительного примера.
[0065] В случае движения транспортного средства V через участок дороги с круговым движением, как описано выше, как показано на Фиг.12(a), поворот первый раз происходит во время t1, и, следовательно, чувствительность понижается. Поскольку кривизна поворота увеличивается до времени t2, чувствительность также постепенно снижается от времени t1 до t2.
[0066] Затем, от времени t2 до t3, поддерживается постоянная кривизна поворота, и чувствительность сохраняется на пониженном уровне. После этого, когда водитель включает сигнал левого поворота и поворачивает руль в левую сторону, чтобы выезжать из участка дороги с круговым движением, начиная со времени t4, кривизна поворота первоначально становится нулевой, и, следовательно, от времени t3 до t4 чувствительность возвращается к первоначальному значению. Затем, кривизна поворота в направлении влево возрастает до времени t5, и, следовательно, от времени t4 до t5 чувствительность снова понижается. Затем, от времени t5 до t6, поддерживается постоянная кривизна поворота, и чувствительность также сохраняется на пониженном уровне. С последующим уменьшением кривизны поворота чувствительность повышается до начального значения.
[0067] Тем не менее, как следует понимать из Фиг.12(a), чувствительность во время t4 является идентичной чувствительности в течение нормального времени. Следовательно, в момент становления нулевой или около того, упрощается некорректное обнаружение стационарного тела в качестве движущегося тела. В частности, на участке дороги с круговым движением чаще всего травяное покрытие и т.п. располагается в центре, и когда чувствительность допускает значение, идентичное значению в нормальное время, даже временно, существует риск уменьшенной точности обнаружения движущихся тел.
[0068] Таким образом, в случаях, в которых угол поворота при рулении достигает или опускается ниже указанного значения, модуль 36 задания чувствительности, согласно третьему варианту осуществления, в ответ на обнаружение посредством модуля 37 обнаружения смены полосы движения смены полосы движения в противоположном направлении относительно направления поворота в ходе выполняемого вождения, уменьшает скорость возвращения, с которой пониженная чувствительность возвращает уровень чувствительности до уменьшения.
[0069] В частности, как показано на Фиг.12(b) от времени t3 до t4, чувствительность не возвращается к начальному значению, а вместо этого медленно понижается от времени t3 до t5. Таким образом, предотвращается резкое падение чувствительности, так что может предотвращаться ситуация, в которой точность обнаружения движущихся тел уменьшается.
[0070] Далее описывается способ обнаружения движущихся тел, согласно третьему варианту осуществления. Фиг.13 является блок-схемой последовательности операций способа, показывающей способ обнаружения движущихся тел, согласно третьему варианту осуществления. Процесс от этапов S21-S26, показанный на Фиг.13, является аналогичным процессу от этапов S1-S6, показанному на Фиг.7, и, следовательно, описание опускается.
[0071] На этапе S27, в случаях, в которых угол поворота при рулении достигает или опускается ниже указанного значения, модуль 36 задания чувствительности определяет то, обнаружена или нет смена полосы движения в противоположном направлении относительно направления поворота (S27). В случае определения того, что смена полосы движения в противоположном направлении относительно направления поворота обнаружена (S27: "Да"), следует понимать, что транспортное средство V движется через участок дороги с круговым движением способом, описанным со ссылкой на Фиг.10-12. Следовательно, модуль 36 задания чувствительности уменьшает предельное значение, которое задано на этапе 25 или 26. Таким образом, как показано на Фиг.12(b), скорость возвращения, на которой указывается возвращение пониженной чувствительности, уменьшается без резкого изменения чувствительности.
[0072] Процесс затем переходит к этапу S29. Процесс от этапов S29-S34, показанный на Фиг.13, является аналогичным процессу от этапов S7-S12, показанному на Фиг.7, и, следовательно, описание опускается.
[0073] Вышеуказанным способом, в устройстве 3 обнаружения движущихся тел и способе обнаружения движущихся тел, согласно третьему варианту осуществления, аналогично относительно первого варианта осуществления, может повышаться точность обнаружения движущихся тел; и даже если формы разностных сигналов представляются большими, несмотря на ассоциирование со стационарными телами вследствие повышенного порогового значения TH, то маловероятно, что такие тела определяются в качестве движущихся тел. Кроме того, может дополнительно повышаться точность обнаружения движущихся тел, и можно дополнительно предотвращать ошибочную оценку стационарных тел в качестве движущихся тел.
[0074] Дополнительно, согласно третьему варианту осуществления, в случаях, в которых угол поворота при рулении достигает или опускается ниже указанного значения, когда смена полосы движения в противоположном направлении относительно направления поворота обнаружена, скорость возвращения, с которой пониженная чувствительность возвращается к своему уровню чувствительности до понижения, уменьшается. Следовательно, в случаях, в которых, например, сигнал поворота в противоположном направлении относительно направления поворота включается в ходе выезда из участка дороги с круговым движением и т.п., когда состояние поворачивания временно становится нулевым, но после этого происходит поворот, пониженная чувствительность не возвращается сразу, так что в момент становления нулевым или около того, стационарные тела не определяются в качестве движущихся тел. Следовательно, может повышаться точность обнаружения движущихся тел даже в случаях выезда из участка дороги с круговым движением и т.п.
[0075] Далее поясняется четвертый вариант осуществления изобретения. Устройство обнаружения движущихся тел и способ обнаружения движущихся тел, согласно четвертому варианту осуществления, являются аналогичными устройству обнаружения движущихся тел и способу обнаружения движущихся тел из первого варианта осуществления, но с некоторыми отличиями по конфигурации и по содержимому процесса. Ниже описываются отличия от первого варианта осуществления.
[0076] Фиг.14 является блок-схемой, показывающей подробности компьютера 30, согласно четвертому варианту осуществления. На Фиг.14, также проиллюстрирована камера 10 для того, чтобы прояснять взаимосвязи соединений.
[0077] Как показано на Фиг.14, в четвертом варианте осуществления, компьютер 30 содержит модуль 38 вычисления яркостного различия, модуль 39 формирования форм сигналов краев и модуль 34a обнаружения движущихся тел. Конфигурация каждого из них описывается ниже.
[0078] Модуль 38 вычисления яркостного различия спроектирован с возможностью обнаруживать края трехмерного объекта, включенного в изображение с высоты птичьего полета, посредством вычисления разностей яркости между пиксельными областями в данных изображений с высоты птичьего полета, которые подвергаются преобразованию точки наблюдения посредством модуля 31 преобразования точки наблюдения. Конкретнее, модуль 38 вычисления разности яркости устанавливает множество точек вычисления вдоль гипотетической вертикальной линии, идущей в вертикальном направлении через реальное пространство, и вычисляет разность яркости между двумя пикселами, близкими к рассматриваемым точкам вычисления. Модуль 38 вычисления разности яркости может вычислять разности яркости либо посредством технологии установления одной гипотетической вертикальной линии, идущей в вертикальном направлении через реальное пространство, либо посредством технологии установления двух гипотетических вертикальных линий.
[0079] Здесь описывается конкретная технология установления двух гипотетических вертикальных линий. В изображении с высоты птичьего полета после преобразования точки наблюдения модуль 38 вычисления яркостного различия устанавливает первую гипотетическую вертикальную линию, соответствующую сегменту, идущему в вертикальном направлении через реальное пространство, и вторую гипотетическую вертикальную линию, отличающуюся от первой гипотетической вертикальной линии и соответствующую сегменту, идущему в вертикальном направлении через реальное пространство. Модуль 38 вычисления разности яркости затем извлекает разности яркости между точками на первой гипотетической вертикальной линии и точками на второй гипотетической вертикальной линии непрерывно вдоль первой гипотетической вертикальной линии и второй гипотетической вертикальной линии. Ниже подробно описывается работа модуля 38 вычисления разности яркости.
[0080] Как показано на Фиг.15(a), модуль 38 вычисления разности яркости устанавливает первую гипотетическую вертикальную линию La (в дальнейшем называемую "линией La интереса"), соответствующую сегменту, идущему в вертикальном направлении через реальное пространство, и проходящую через область A1 обнаружения. Модуль 38 вычисления разности яркости также устанавливает вторую гипотетическую вертикальную линию Lr (в дальнейшем называемую "опорной линией Lr"), отличающуюся от линии La интереса, соответствующей сегменту, идущему в вертикальном направлении через реальное пространство, и проходящую через область A1 обнаружения. Эта опорная линия Lr устанавливается в позиции на предварительно определенном расстоянии от линии La интереса в реальном пространстве. Линии, соответствующие сегментам, идущим в вертикальном направлении через реальное пространство, являются линиями, которые расходятся радиально от Ps позиции камеры 10 в изображении с высоты птичьего полета. Эти радиально расходящиеся линии являются линиями, которые располагаются вдоль направления перспективного ракурса трехмерных объектов в ходе преобразования в вид с высоты птичьего полета.
[0081] Модуль 38 вычисления разности яркости устанавливает точку Pa интереса на линии La интереса (точку на первой гипотетической вертикальной линии). Модуль 38 вычисления разности яркости также устанавливает опорную точку Pr на опорной линии Lr (точку на второй гипотетической вертикальной линии). Взаимосвязи между линией La интереса, точкой Pa интереса, опорной линией Lr и опорной точкой Pr в реальном пространстве показаны на Фиг.15(b). Как можно понять из Фиг.15(b), линия La интереса и опорная линия Lr являются линиями, идущими в вертикальном направлении через реальное пространство, в то время как точка Pa интереса и опорная точка Pr являются точками, заданными на приблизительно идентичной высоте в реальном пространстве. Не принципиально, чтобы точка Pa интереса и опорная точка Pr имели точно идентичную высоту, и определенная величина ошибки, так что точка Pa интереса и опорная точка Pr могут считаться имеющими идентичную высоту, является допустимой.
[0082] Модуль 38 вычисления разности яркости извлекает разность яркости между точкой Pa интереса и опорной точкой Pr. В случае большой разности яркости между точкой Pa интереса и опорной точкой Pr, следует понимать, что край присутствует между точкой Pa интереса и опорной точкой Pr. В частности, в четвертом варианте осуществления, гипотетические вертикальные линии устанавливаются в качестве сегментов, идущих в вертикальном направлении через реальное пространство в изображении с высоты птичьего полета, в целях обнаружения трехмерных объектов, присутствующих в областях A1, A2 обнаружения, и следовательно, в случаях высокого большой разности яркости между линией La интереса и опорной линией Lr, имеется высокая вероятность того, что край трехмерного объекта присутствует в местоположении, в котором задана линия La интереса.
[0083] Этот аспект описывается подробнее. Фиг.16 является схемой, описывающей подробную работу модуля 38 вычисления разности яркости, при этом (a) показывает изображение с высоты птичьего полета, снятое в виде с высоты птичьего полета, а (b) является укрупненным видом участка B1 изображения с высоты птичьего полета, показанного на Фиг.16(a). С учетом того, что Фиг.16 показывает и описывает только область A1 обнаружения, сравнимая процедура также должна быть использована для того, чтобы вычислять разности яркости для области A2 обнаружения.
[0084] В случае, если другое транспортное средство V показывается в захваченном изображении, захваченном посредством камеры 10, другое транспортное средство V появляется в области A1 обнаружения в изображении с высоты птичьего полета, как показано на Фиг.16(a). Допустим, что, как показано посредством укрупненного вида области B1 по Фиг.16(a) на Фиг.16(b), линия La интереса установлена в секции резины шины другого транспортного средства V в изображении с высоты птичьего полета. В этом состоянии модуль 38 вычисления разности яркости сначала устанавливает опорную линию Lr. Опорная линия Lr устанавливается вдоль вертикального направления в позиции на предварительно определенном расстоянии от линии La интереса в реальном пространстве. Конкретнее, в устройстве 4 обнаружения движущихся тел настоящего варианта осуществления, опорная линия Lr устанавливается в позиции на расстоянии в 10 см от линии La интереса в реальном пространстве. Таким образом, опорная линия Lr устанавливается, например, на колесе шины другого транспортного средства V, которое является эквивалентным расстоянию в 10 см от резины шины другого транспортного средства V в изображении с высоты птичьего полета.
[0085] Затем, модуль 38 вычисления разности яркости устанавливает множество точек Pa1-PaN на линии La интереса. На Фиг.16(b), для удобства установлено шесть точек Pa1-Pa6 интереса (в дальнейшем в этом документе, просто термин "точка Pai интереса" должен быть использован в случаях, в которых показана произвольная точка). Число точек Pa интереса, установленных на линии La интереса, является произвольным. В нижеприведенном описании, в описании предполагается, что число N точек интереса установлено на линии La интереса.
[0086] Затем, модуль 38 вычисления разности яркости устанавливает опорные точки Pr1-PrN таким образом, что эти точки имеют высоту, идентичную высоте точек Pa1-PaN интереса в реальном пространстве. Модуль 38 вычисления разности яркости затем вычисляет разности яркости между точками Pa интереса и опорными точками Pr с идентичной высотой. Таким образом, модуль 38 вычисления разности яркости вычисляет разность яркости между двумя пикселами для каждой из множества позиций (1-N) вдоль гипотетических вертикальных линий, идущих в вертикальном направлении через реальное пространство. Например, модуль 38 вычисления разности яркости вычисляет разность яркости между первой точкой Pa1 интереса и первой опорной точкой Pr1 и вычисляет разность яркости между второй точкой Pa2 интереса и второй опорной точкой Pr2. Таким образом, модуль 38 вычисления разности яркости извлекает разности яркости непрерывно вдоль линии La интереса и опорной линии Lr. В частности, модуль 38 вычисления разности яркости последовательно извлекает разности яркости между с третьей по N-ную точками Pa3-PaN интереса и с третьей по N-ную опорными точками Pr3-PrN.
[0087] Модуль 38 вычисления разности яркости, при сдвиге линии La интереса в области A1 обнаружения, многократно выполняет вышеописанный процесс установления опорной линии Lr, установления точек Pa интереса и опорных точек Pr и вычисления разностей яркости. В частности, модуль 38 вычисления разности яркости многократно выполняет вышеописанный процесс при варьировании позиций линии La интереса и опорной линии Lr, соответственно, посредством идентичного данного расстояния в направлении растягивания касательной линии L1 в реальном пространстве. Например, модуль 38 вычисления разности яркости устанавливает линию, которая служит в качестве опорной линии в предыдущем процессе, в качестве линии La интереса, устанавливает опорную линию Lr для этой линии La интереса и извлекает разности яркости последовательным способом.
[0088] Таким образом, согласно второму варианту осуществления, посредством извлечения разностей яркости из точек Pa интереса на линии La интереса и опорных точек Pr на опорной линии Lr приблизительно на идентичной высоте в реальном пространстве, разности яркости могут быть безусловно обнаружены в случаях, в которых край присутствует в вертикальном направлении. Кроме того, поскольку разности яркости сравниваются между гипотетическими вертикальными линиями, идущими в вертикальном направлении в реальном пространстве, даже когда трехмерный объект растянут согласно его высоте от поверхности дороги вследствие преобразования в изображение с высоты птичьего полета, влияние на процесс обнаружения трехмерных объектов не оказывается, и может повышаться точность обнаружения трехмерных объектов.
[0089] Модуль 39 формирования форм сигналов краев, показанный на Фиг.14, формирует одномерную форму EWt сигнала края на основе края, обнаруженного посредством модуля 38 вычисления разности яркости. Например, модуль 39 формирования форм сигналов краев может формировать одномерную форму EWt сигнала края посредством обнаружения пикселов, для которых интенсивность (яркостное различие) края равна или превышает предварительно определенное пороговое значение t края, по методу, сравнимому со способом для формирования форм DWt разностных сигналов в первом варианте осуществления, подсчитывает число пикселов, для которых интенсивность (разность яркости) края равна или превышает предварительно определенное пороговое значение t края, вдоль направления перспективного ракурса трехмерных объектов вследствие преобразования точки наблюдения, создавая частотное распределение.
[0090] Кроме того, посредством смещения формы EWt-1 сигнала края непосредственно предшествующего момента времени на эквивалент величины движения на основе скорости транспортного средства V, модуль 39 формирования форм сигналов краев выполняет позиционное совмещение формы EWt-1 сигнала края непосредственно предшествующего момента времени и текущей формы EWt сигнала края и на основе разности формы EWt-1 сигнала края после позиционного совмещения непосредственно предшествующего момента времени и текущей формы EWt сигнала края формирует форму EWt' разностного сигнала края. Здесь, Фиг.17(A) является примером текущей формы EWt сигнала края, а Фиг.17(B) является примером формы EWt-1 сигнала края непосредственно предшествующего момента времени. В этом случае, может определяться то, что трехмерный объект движется на расстояние d относительно транспортного средства V. В этом случае, как показано на Фиг.17(C), модуль 39 формирования форм сигналов краев может формировать форму EWt' разностного сигнала края посредством иллюстрации разности между формой EWt-1 сигнала края после позиционного совмещения непосредственно предшествующего момента времени и текущей формой EWt сигнала края на вертикальной оси и позиции обнаружения в направлении продвижения области обнаружения на горизонтальной оси. Посредством такого инструктирования модулю 39 формирования форм сигналов краев формировать форму EWt' разностного сигнала края на основе разности между формой EWt-1 сигнала края непосредственно предшествующего момента времени и текущей формой EWt сигнала края, могут обнаруживаться трехмерные объекты, которые с большой вероятностью являются движущимися телами.
[0091] На основе данных формы EWt' разностного сигнала края, модуль 34a обнаружения движущихся тел обнаруживает движущиеся тела. Таким же образом, как в первом варианте осуществления, модуль 34a обнаружения движущихся тел сначала вычисляет среднее значение формы EWt' разностного сигнала края, и если вычисленное среднее значение формы EWt' разностного сигнала края равно или превышает пороговое значение TH, заданное посредством модуля 36 задания чувствительности, определяет то, что возможно то, что движущееся тело присутствует; или с другой стороны, если среднее значение формы EWt' разностного сигнала края не равно или превышает пороговое значение TH, определяет то, что отсутствует вероятность присутствия движущегося тела. В случаях, в которых форма EWt' разностного сигнала края обусловлена искажением, маловероятно, что среднее значение формы EWt' разностного сигнала края равно или превышает пороговое значение TH, и, следовательно, модуль 34a обнаружения движущихся тел сначала выполняет процесс обработки пороговых значений и выполняет определение в отношении вероятности движущегося тела. Модуль 34a обнаружения движущихся тел не ограничен этим, и также приемлемо, например, определять то, что объект возможно является движущимся телом в случаях, в которых отношение площади поверхности, равное или превышающее предварительно определенное пороговое значение в форме EWt' разностного сигнала края, равно или превышает предварительно определенное отношение, и определять то, что отсутствует вероятность представления как движущегося тела в иных случаях. В качестве порогового значения для определения того, является или нет трехмерный объект движущимся телом, на основе формы EWt' разностного сигнала края, модуль 36 задания чувствительности может задавать пороговое значение, которое отличается от порогового значения для определения того, является или нет трехмерный объект движущимся телом, на основе формы DWt разностного сигнала.
[0092] В случаях, в которых модуль 34a обнаружения движущихся тел определяет в вышеописанном процессе обработки пороговых значений то, что трехмерный объект, указываемый посредством формы EWt' разностного сигнала края, возможно является движущимся телом, он ассоциирует форму EWt-1' разностного сигнала края непосредственно предшествующего момента времени и эту форму EWt' разностного сигнала края, чтобы вычислять оцененную скорость трехмерного объекта. Например, в случае, если трехмерный объект является другим транспортным средством V, края легко получаются в секциях шин другого транспортного средства V, и, следовательно, форма EWt-1' разностного сигнала края легко стремится иметь два максимальных значения. Следовательно, посредством извлечения отклонения между максимальными значениями формы EWt-1' разностного сигнала края непосредственно предшествующего момента времени и этой формы EWt' разностного сигнала края, может извлекаться относительная скорость другого транспортного средства V относительно транспортного средства V. Таким образом, модуль 34a обнаружения движущихся тел извлекает оцененную скорость трехмерного объекта. Затем, на основе оцененной скорости, модуль 34a обнаружения движущихся тел определяет то, является трехмерный объект, представленный посредством формы EWt' разностного сигнала края, движущимся телом или стационарным телом.
[0093] Далее описывается способ обнаружения движущихся тел, согласно четвертому варианту осуществления. Фиг.18 является блок-схемой последовательности операций способа, показывающей способ обнаружения движущихся тел, согласно четвертому варианту осуществления. Процесс от этапов S41-S47 на Фиг.18 является аналогичным процессу от этапов S1-S7, показанному на Фиг.7, и, следовательно, описание опускается.
[0094] Как показано на Фиг.15, на этапе S48, модуль 38 вычисления разности яркости устанавливает в качестве линии La интереса линию, соответствующую линии, идущей в вертикальном направлении через реальное пространство, и устанавливает в качестве опорной линии Lr линию на предварительно определенном расстоянии от линии La интереса в реальном пространстве. Модуль 38 вычисления разности яркости затем устанавливает множество точек Pa интереса на линии La интереса и множество опорных точек Pr на опорной линии Lr приблизительно на идентичной высоте с точками Pa интереса. Модуль 38 вычисления разности яркости затем вычисляет разности яркости между точками Pa интереса и опорными точками Pr с идентичной высотой в реальном пространстве, чтобы обнаруживать край фотографического субъекта, из изображения с высоты птичьего полета.
[0095] На этапе S49, на основе края, обнаруженного на этапе S48, одномерная форма EDt' разностного сигнала края формируется посредством модуля 39 формирования форм сигналов краев. Конкретнее, модуль 39 формирования форм сигналов краев подсчитывает число пикселов, в которых обнаружен край, в направлении перспективного ракурса вследствие преобразования точки наблюдения и создает частотное распределение, чтобы формировать одномерную форму EDt' сигнала края. Модуль 39 формирования форм сигналов краев дополнительно выполняет позиционное совмещение формы EWt-1 сигнала края непосредственно предшествующего момента времени и текущей формы EWt сигнала края и формирует одномерную форму EWt' разностного сигнала края на основе разности формы EWt-1 сигнала края после позиционного совмещения непосредственно предшествующего момента времени и текущей формы EWt сигнала края.
[0096] Затем, на этапе S50, определение в отношении того, равно или превышает либо нет среднее значение формы EWt' разностного сигнала края, сформированной на этапе S49, пороговое значение TH, которое задано на этапе S47, выполняется посредством модуля 34a обнаружения движущихся тел. В случаях, в которых среднее значение формы EWt' разностного сигнала края равно или превышает пороговое значение TH, определяется то, что возможно присутствует движущееся тело, и процесс переходит к этапу S51. С другой стороны, в случаях, в которых среднее значение формы EWt' разностного сигнала края меньше порогового значения TH, определяется то, что отсутствует вероятность того, что присутствует движущееся тело, и процесс, показанный на Фиг.17, завершается.
[0097] На этапе S51, модуль 34a обнаружения движущихся тел выполняет вычисление оцененной скорости трехмерного объекта на основе разности формы EWt-1' сигнала края после позиционного совмещения непосредственно предшествующего момента времени и формы EWt' сигнала края, сформированной посредством этого текущего процесса. Затем, на этапах S52, S53, выполняется определение таким же образом, как на этапах S11, S12 первого варианта осуществления, в отношении того, является или нет оцененная скорость трехмерного объекта надлежащей скоростью для другого транспортного средства или мотоцикла (S52). В случаях, в которых оцененная скорость трехмерного объекта является надлежащей скоростью для другого транспортного средства или мотоцикла (S52: "Да"), определяется то, что трехмерный объект, указываемый посредством формы EWt' сигнала края, является движущимся телом класса, предназначенного для обнаружения (другие транспортные средства, мотоциклы и т.п.) (S53).
[0098] Таким образом, в устройстве 4 обнаружения движущихся тел и способе обнаружения движущихся тел, согласно четвертому варианту осуществления, край обнаруживается из изображения с высоты птичьего полета, и оцененная скорость трехмерного объекта вычисляется на основе обнаруженного края, посредством чего даже в ситуациях, в которых в зависимости от окружения освещения транспортного средства V, трудно вычислять оцененную скорость трехмерного объекта на основе формы разностного сигнала, оцененная скорость трехмерного объекта может быть вычислена на основе края. Кроме того, согласно четвертому варианту осуществления, даже в случаях, в которых несмотря на указание стационарного тела, форма EWt' разностного сигнала края представляется большой вследствие поворота транспортного средства V посредством модификации порогового значения TH способом в зависимости от состояния поворачивания транспортного средства V, может эффективно предотвращаться некорректное обнаружение стационарных тел в качестве движущихся тел.
[0099] Хотя настоящее изобретение описано выше на основе вариантов осуществления, настоящее изобретение никоим образом не ограничивается вышеописанными вариантами осуществления, и различные модификации являются возможными без отступления от сущности настоящего изобретения, как и комбинации вариантов осуществления.
[0100] Например, в вышеописанных вариантах осуществления, скорость транспортного средства транспортного средства V определяется на основе сигнала из датчика 21 скорости, но на это нет ограничений, и приемлемо оценивать скорость из множества изображений, снятых в различные моменты времени. В этом случае, исключается потребность в датчике скорости, и достигается более простая конфигурация.
[0101] Дополнительно, в вышеописанных вариантах осуществления, захваченное изображение в текущий момент времени и изображение в непосредственно предшествующий момент времени преобразуются в схематичные виды с высоты птичьего полета, и после выполнения позиционного совмещения преобразованных схематичных видов с высоты птичьего полета формируется разностное изображение PDt, и сформированное разностное изображение PDt оценивается вдоль направления перспективного ракурса (направления перспективного ракурса трехмерных объектов в ходе преобразования захваченных изображений в схематичные виды с высоты птичьего полета), формируя форму DWt разностного сигнала, но ограничений на это нет. Например, преобразование в схематичный вид с высоты птичьего полета может быть выполнено исключительно для изображения непосредственно предшествующего момента времени, и после позиционного совмещения преобразованного схематичного вида с высоты птичьего полета, снова преобразованного в эквивалент захваченного изображения, после чего выполняется формирование разностного изображения из этого изображения и изображения в текущий момент времени и оценка сформированного разностного изображения вдоль направления, соответствующего направлению перспективного ракурса (в частности, вдоль направления преобразования направления перспективного ракурса в направление на захваченном изображении), чтобы формировать форму DWt разностного сигнала. В частности, при условии, что выполняется позиционное совмещение изображения в текущий момент времени и изображения непосредственно предшествующего момента времени, разностное изображение PDt формируется из разности обоих изображений после позиционного совмещения, и разностное изображение PDt оценивается вдоль направления перспективного ракурса трехмерных объектов в ходе преобразования в схематичный вид с высоты птичьего полета, не всегда обязательно формировать схематичный вид с высоты птичьего полета.
[0102] В вариантах осуществления, представленных выше, показаны примеры конфигураций, в которых трехмерный объект определяется в качестве движущегося тела в случаях, в которых оцененная скорость трехмерного объекта определена как надлежащая скорость для другого транспортного средства, мотоцикла и т.п.; тем не менее, также должна быть приемлемой конфигурация, в которой состояния скорости, используемые для того, чтобы определять то, является или нет объект другим транспортным средством, мотоциклом и т.п., изменяются в случаях, в которых транспортное средство V поворачивает. Например, в случаях, в которых трехмерный объект определяется в качестве движущегося тела в случаях, в которых абсолютная скорость движения трехмерного объекта составляет 10 км/ч или выше в случаях, в которых транспортное средство V поворачивает, в таком случае может определяться, например, то, что трехмерный объект является движущимся телом в случаях, в которых абсолютная скорость движения трехмерного объекта составляет 20 км/ч или выше. Таким образом, обнаружение трехмерных объектов в качестве движущихся тел может подавляться в случаях, в которых транспортное средство V поворачивает, так что может эффективно предотвращаться некорректное обнаружение стационарных тел в качестве движущихся тел.
[0103] Дополнительно, в упомянутом выше втором варианте осуществления показан пример конфигурации, в которой пороговое значение для извлечения разностных пикселов DP изменяется на более высокое значение в случаях, в которых транспортное средство V поворачивает, но ограничений на эту конфигурацию нет. Например, также является приемлемой конфигурация, в которой вывод пикселных значений из пикселов понижается в случаях, в которых транспортное средство V поворачивает, в силу этого подавляя обнаружение трехмерных объектов в качестве движущихся тел. В этом случае также может эффективно предотвращаться некорректное обнаружение стационарного тела в качестве движущегося тела вследствие поворота транспортного средства V.
[0104] Кроме того, в упомянутом выше четвертом варианте осуществления показан пример конфигурации, в которой значение порогового значения TH для определения того, является или нет трехмерный объект движущимся телом, изменяется согласно состояниям поворота транспортного средства V, но ограничений на эту конфигурацию нет. Например, также является приемлемой конфигурация, в которой пороговое значение t края для обнаружения краев изменяется согласно состояниям поворота транспортного средства V. Например, также является приемлемой конфигурация, в которой пороговое значение t края для обнаружения края изменяется согласно состояниям поворота транспортного средства V. Например, в четвертом варианте осуществления, число пикселов, для которых интенсивность (яркостное различие) края равна или превышает предварительно определенное пороговое значение t, подсчитывается вдоль направления перспективного ракурса трехмерных объектов вследствие преобразования точки наблюдения, создавая частотное распределение, чтобы формировать одномерную форму EDt сигнала края, и посредством изменения этого порогового значения края на более высокое значение в случаях, в которых транспортное средство V поворачивает, значения одномерной формы EDt сигнала края, сформированные таким образом, становятся меньшими, и как результат, обнаружение движущихся тел может подавляться, так что может эффективно предотвращаться некорректное обнаружение стационарных тел в качестве движущихся тел. Также является приемлемой конфигурация, в которой значения яркости, выводимые из пикселов, становятся меньшими в случаях, в которых транспортное средство V поворачивает, чтобы подавлять обнаружение трехмерных объектов в качестве движущихся тел. В этом случае также может эффективно предотвращаться некорректное обнаружение стационарных тел в качестве движущихся тел вследствие поворота транспортного средства V.
[0105] Дополнительно, в упомянутом выше четвертом варианте осуществления показан пример конфигурации, в которой позиционное совмещение выполняется для формы EWt-1 сигнала края непосредственно предшествующего момента времени и текущей формы EWt сигнала края; на основе разности формы EWt-1 сигнала края после позиционного совмещения непосредственно предшествующего момента времени и текущей формы EWt сигнала края, форма EWt' разностного сигнала края формируется; и форма EWt-1' сигнала края непосредственно предшествующего момента времени и эта форма EWt' сигнала края ассоциируются, чтобы вычислять оцененную скорость трехмерного объекта. Тем не менее, ограничений на эту конфигурацию нет, и также является приемлемой конфигурация, в которой, например, оцененная скорость трехмерного объекта вычисляется посредством ассоциирования формы EWt-1 сигнала края непосредственно предшествующего момента времени и текущей формы EWt сигнала края. Также является приемлемой конфигурация, в которой определяется то, равна или превышает либо нет форма EWt сигнала края предварительно определенное пороговое значение TH, и в случаях, в которых форма EWt сигнала края равна или превышает предварительно определенное пороговое значение TH, определяется то, что присутствует трехмерный объект, который возможно является движущимся телом, или в случаях, в которых форма EWt сигнала края меньше предварительно определенного порогового значения TH, определяется то, что не присутствует трехмерный объект, который возможно является движущимся телом.
[0106] Камера 10 по вариантам осуществления, представленным выше, соответствует средству захвата изображений настоящего изобретения; модуль 31 преобразования точки наблюдения соответствует средству преобразования изображений настоящего изобретения; модуль 32 формирования разностных изображений, модуль 33 формирования форм разностных сигналов, модуль 34, 34a обнаружения движущихся тел, модуль 38 вычисления разности яркости и модуль 39 формирования форм сигналов краев соответствуют средству обнаружения трехмерных объектов настоящего изобретения; модуль 34, 34a обнаружения движущихся тел соответствует средству обнаружения движущихся тел настоящего изобретения; модуль 35 обнаружения поворотов соответствует средству обнаружения поворотов настоящего изобретения; модуль 36 задания чувствительности соответствует средству задания чувствительности настоящего изобретения; и модуль 37 обнаружения смены полосы движения соответствует средству обнаружения смены полосы движения настоящего изобретения.
[0107] ПОЯСНЕНИЯ НОМЕРОВ ССЫЛОК
1-3 - устройство обнаружения движущихся тел
10 - камера
20 - датчик
21 - датчик скорости транспортного средства
22 - датчик угла поворота при рулении
30 - компьютер
31 - модуль преобразования точки наблюдения
32 - модуль формирования разностных изображений
33 - модуль формирования форм разностных сигналов
34, 34a - модуль обнаружения движущихся тел
35 - модуль обнаружения поворотов
36 - модуль задания чувствительности
37 - модуль обнаружения смены полосы движения
38 - модуль вычисления разности яркости
39 - модуль формирования форм сигналов краев
a - угол обзора
A1, A2 - области обнаружения
CP - точка пересечения
DP - разностный пиксель
DWt, DWt' - формы разностных сигналов
La, Lb - линии в направлении перспективного ракурса трехмерных объектов
PB - изображение с высоты птичьего полета
PD - разностное изображение
V - транспортное средство, другое транспортное средство
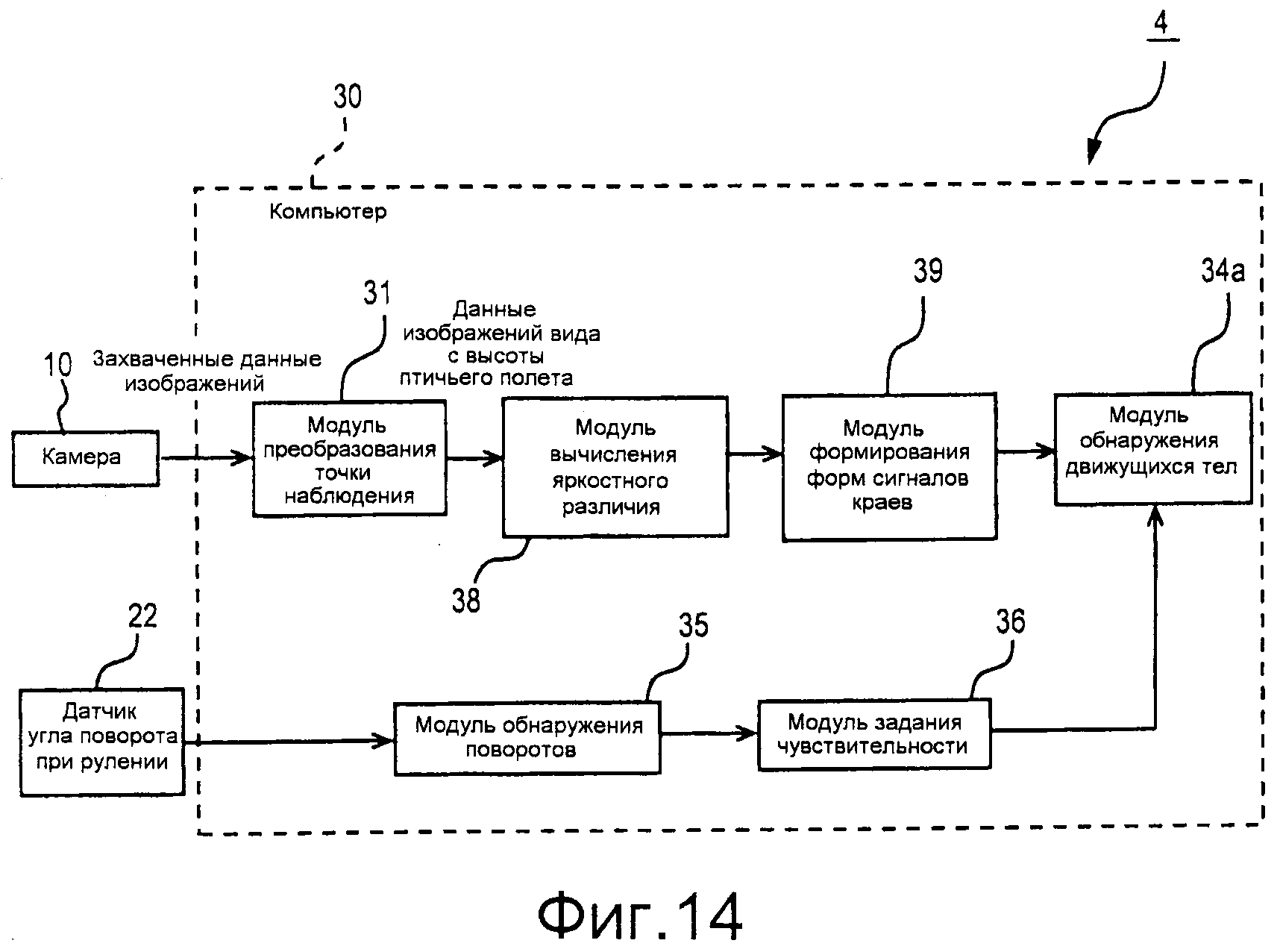
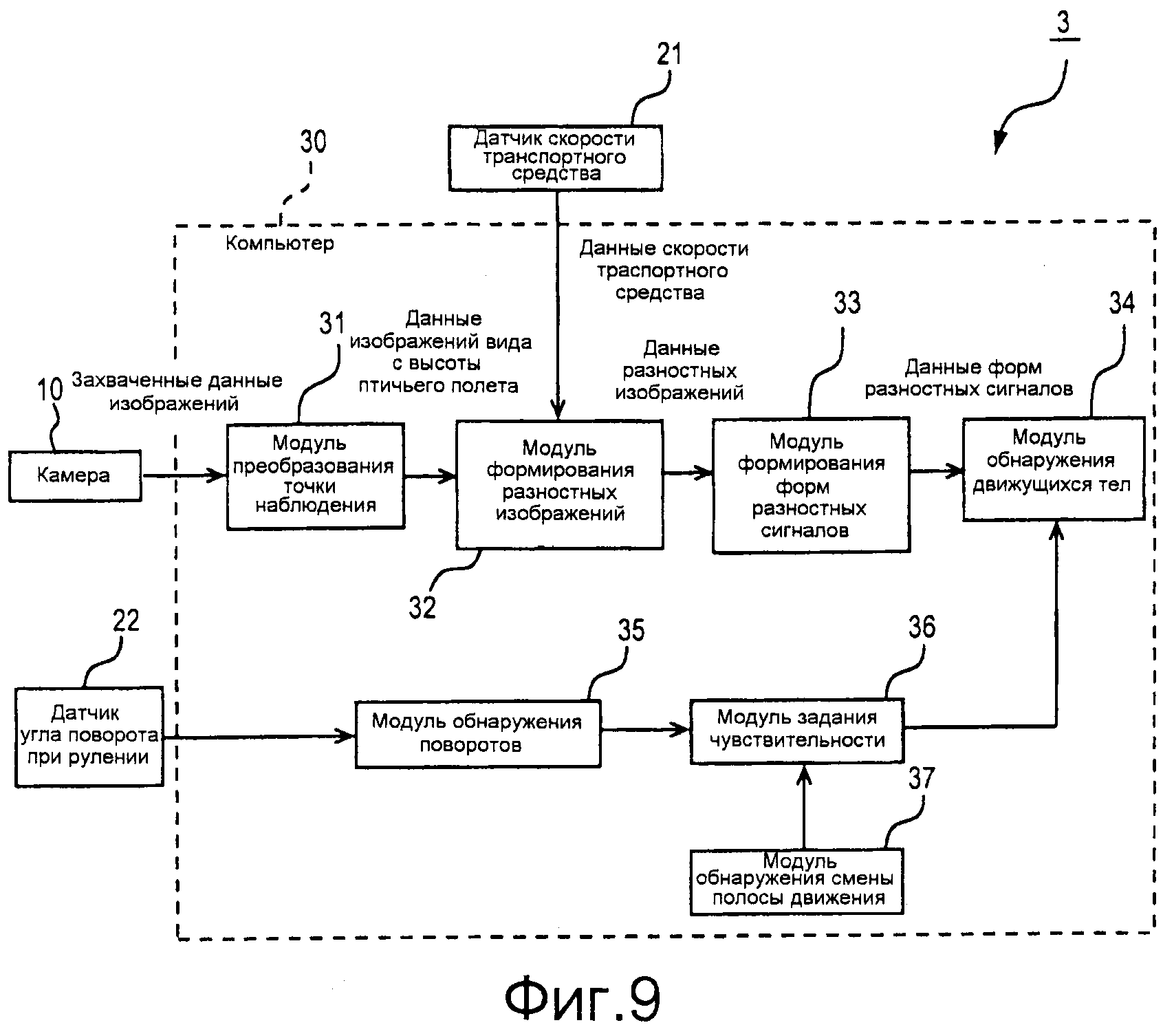
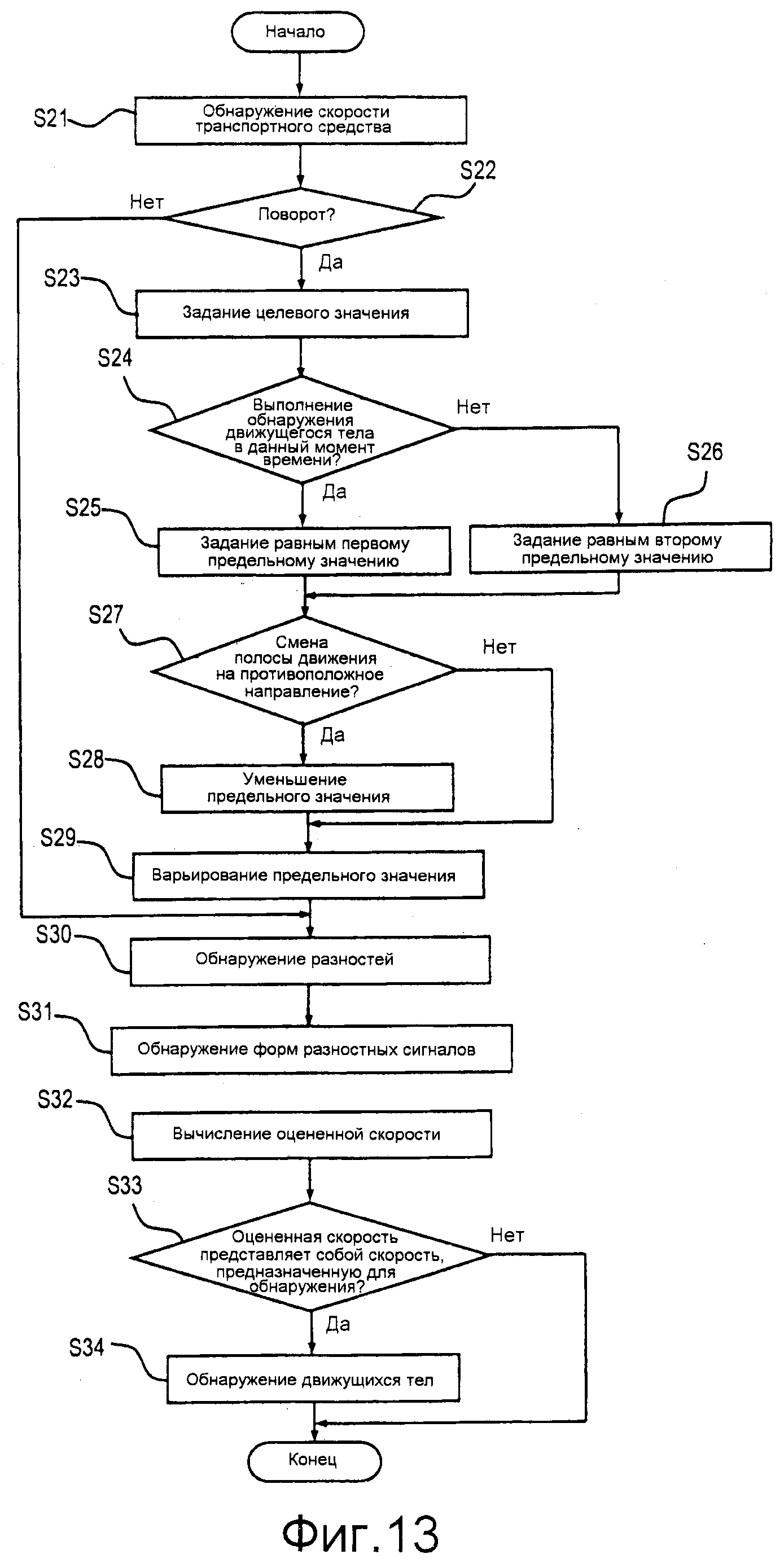
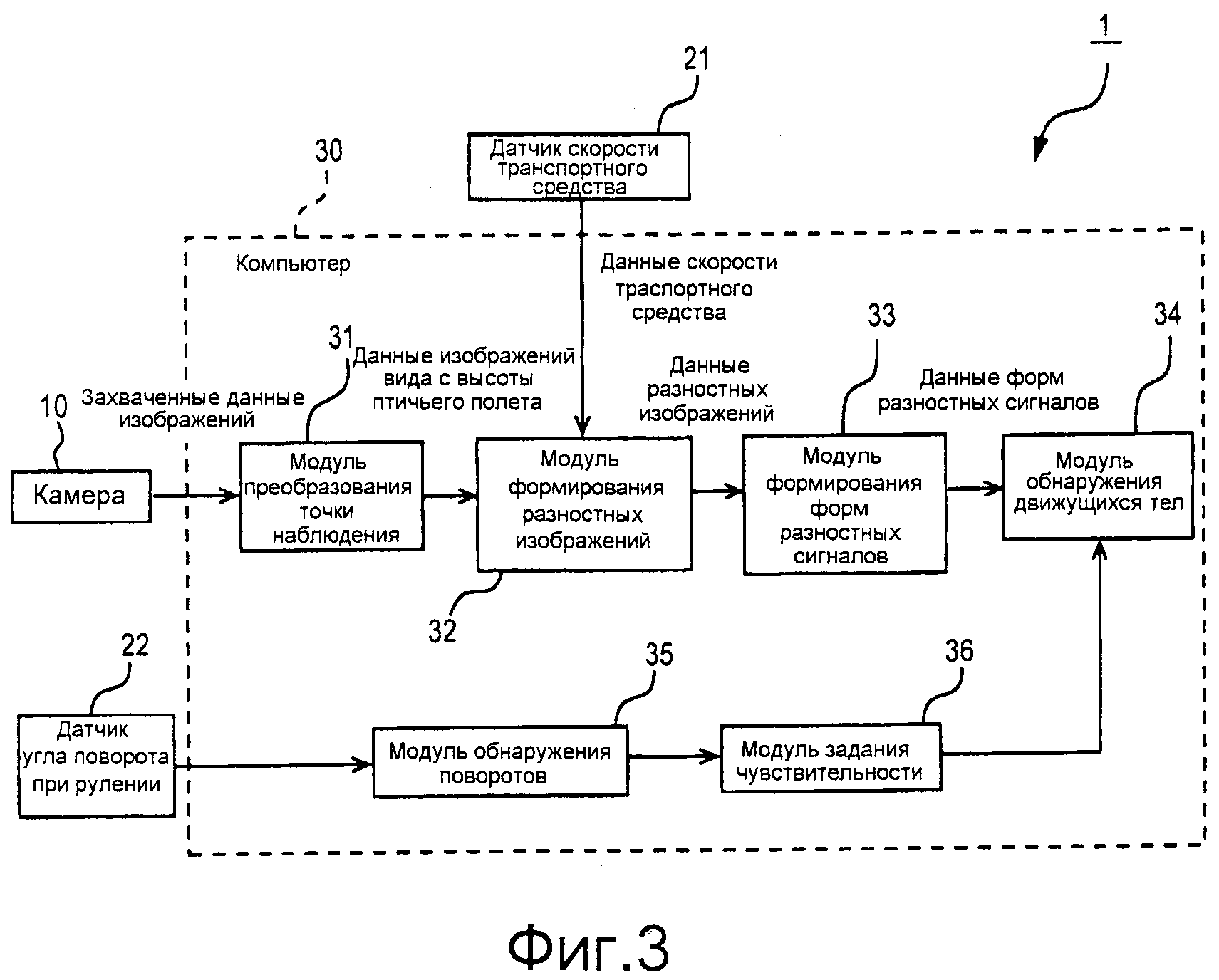
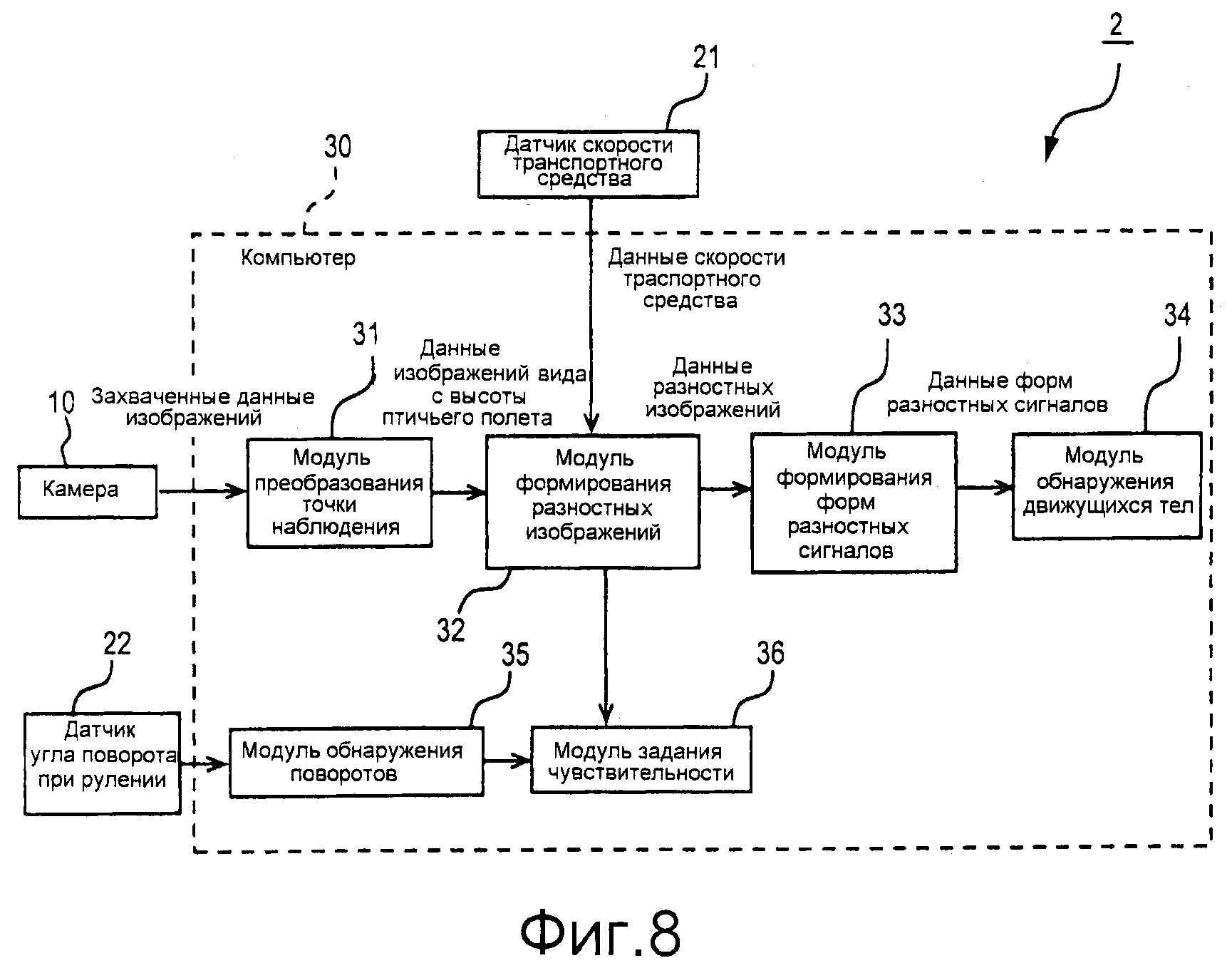
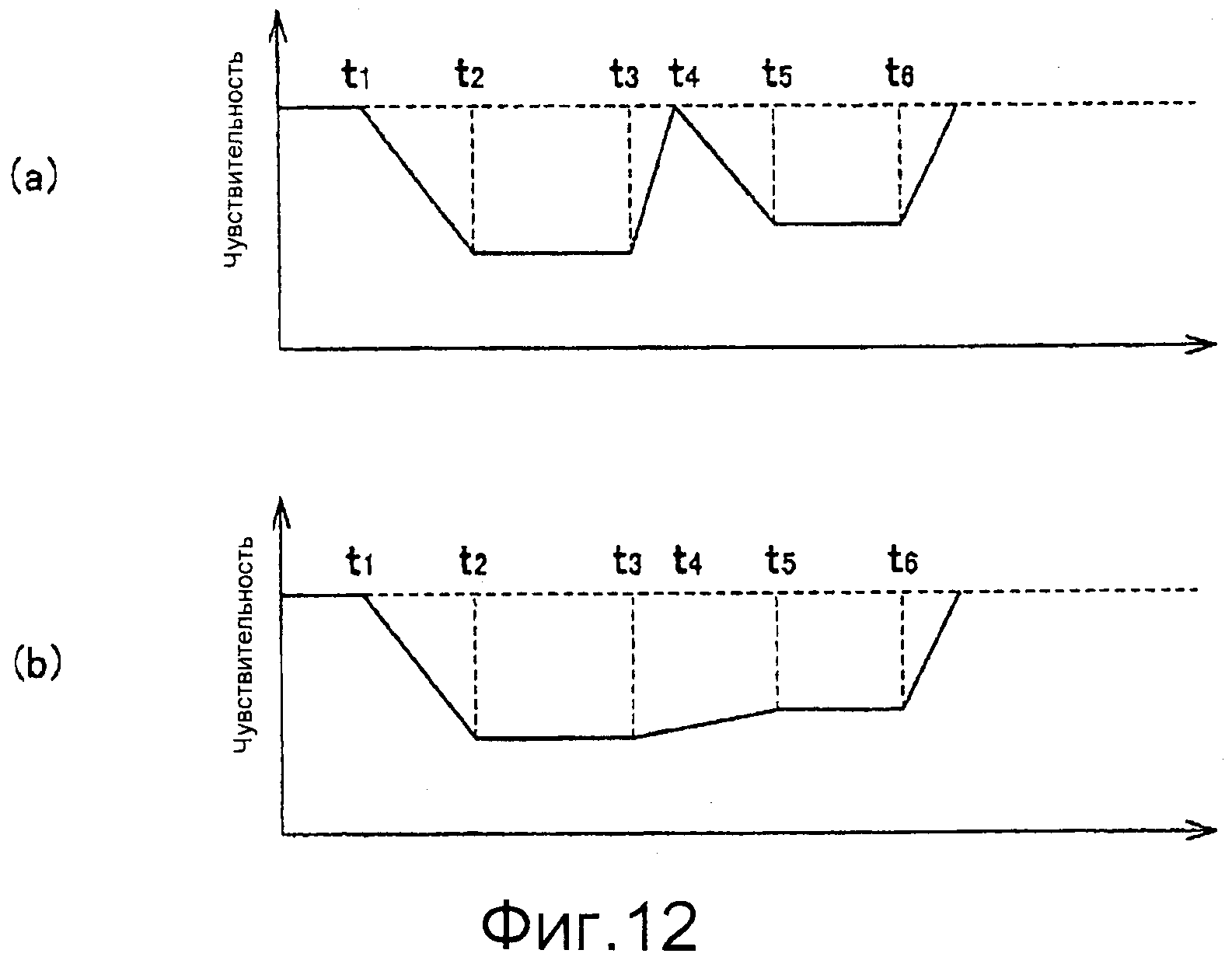
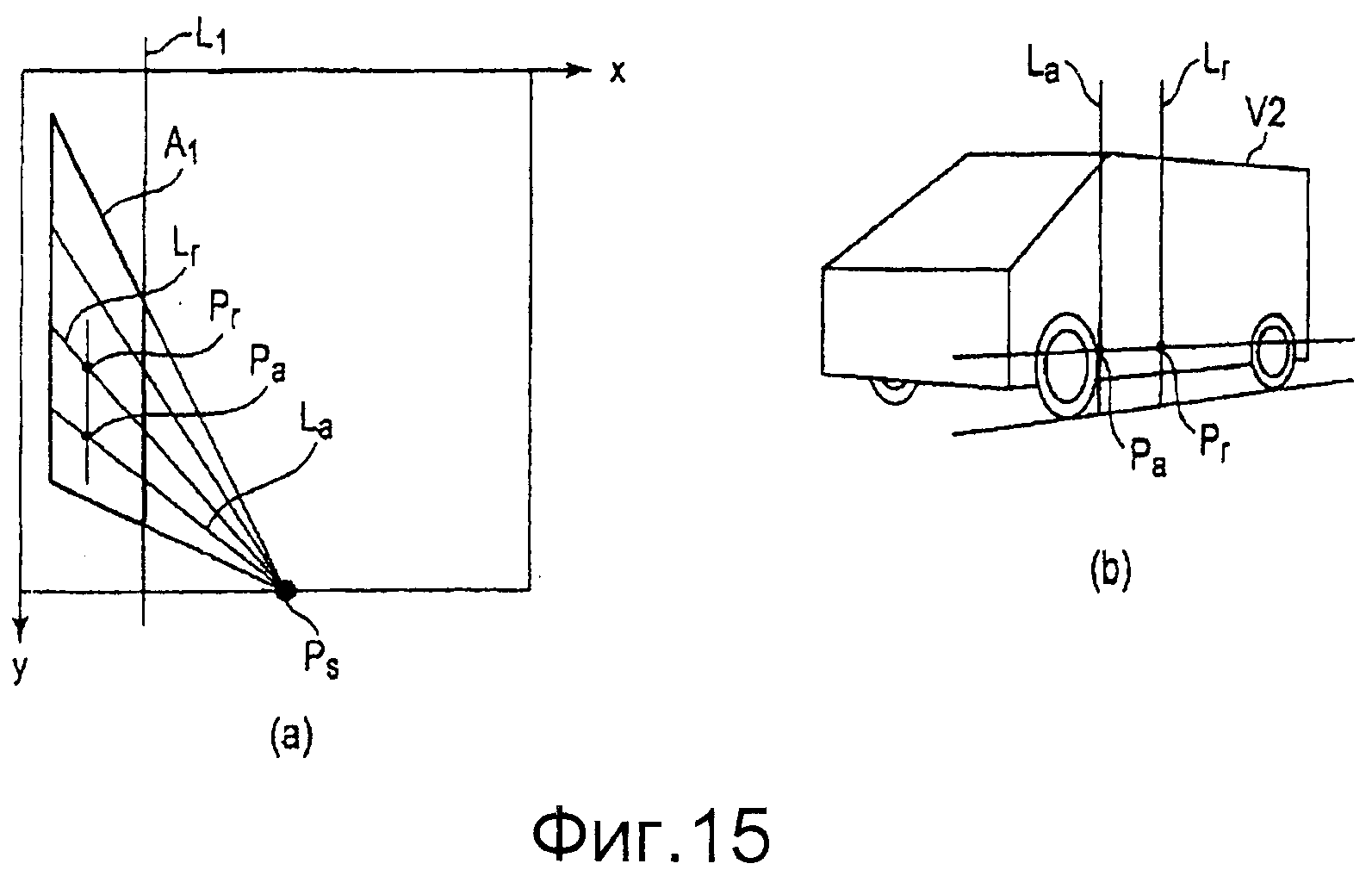
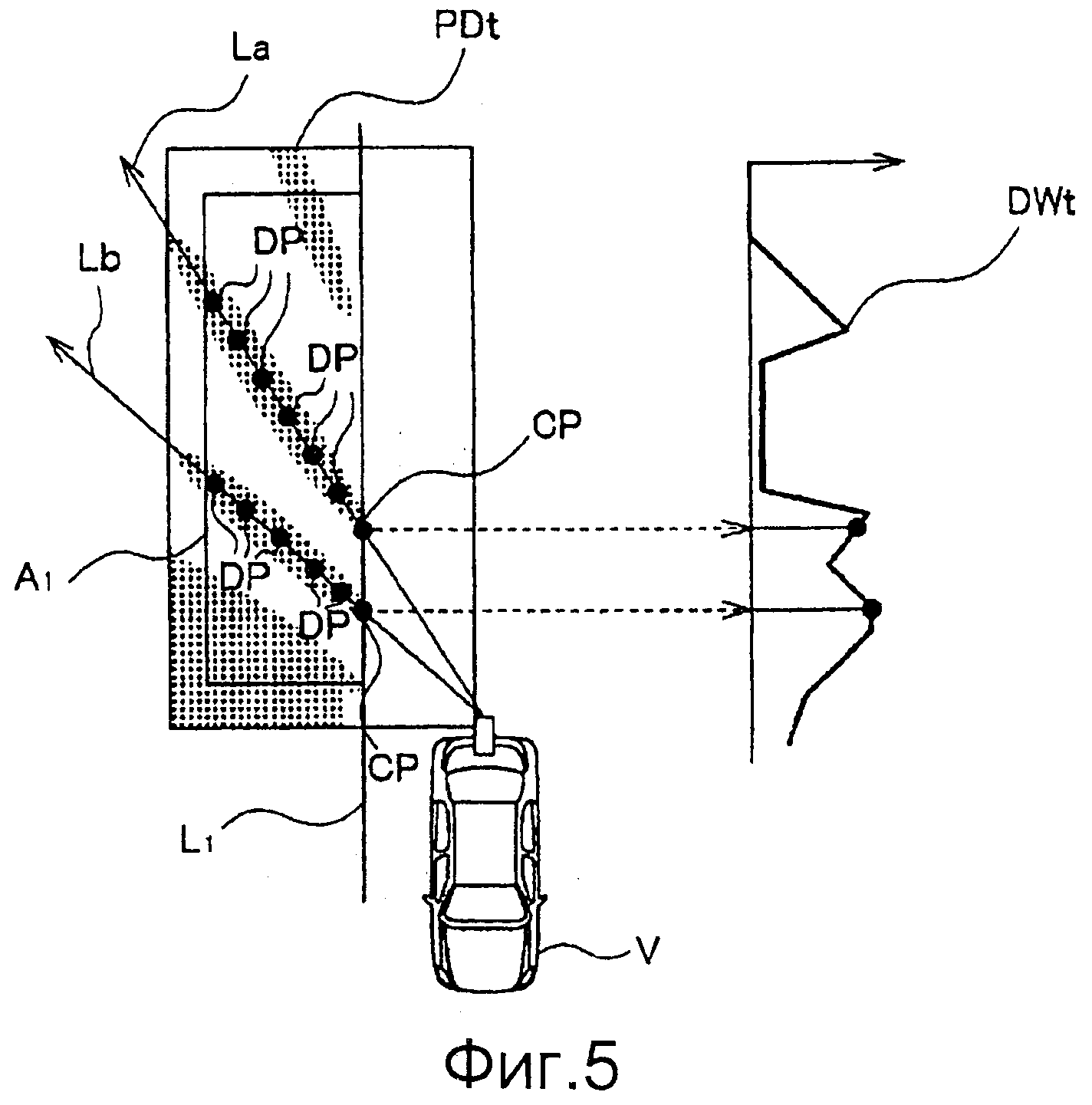
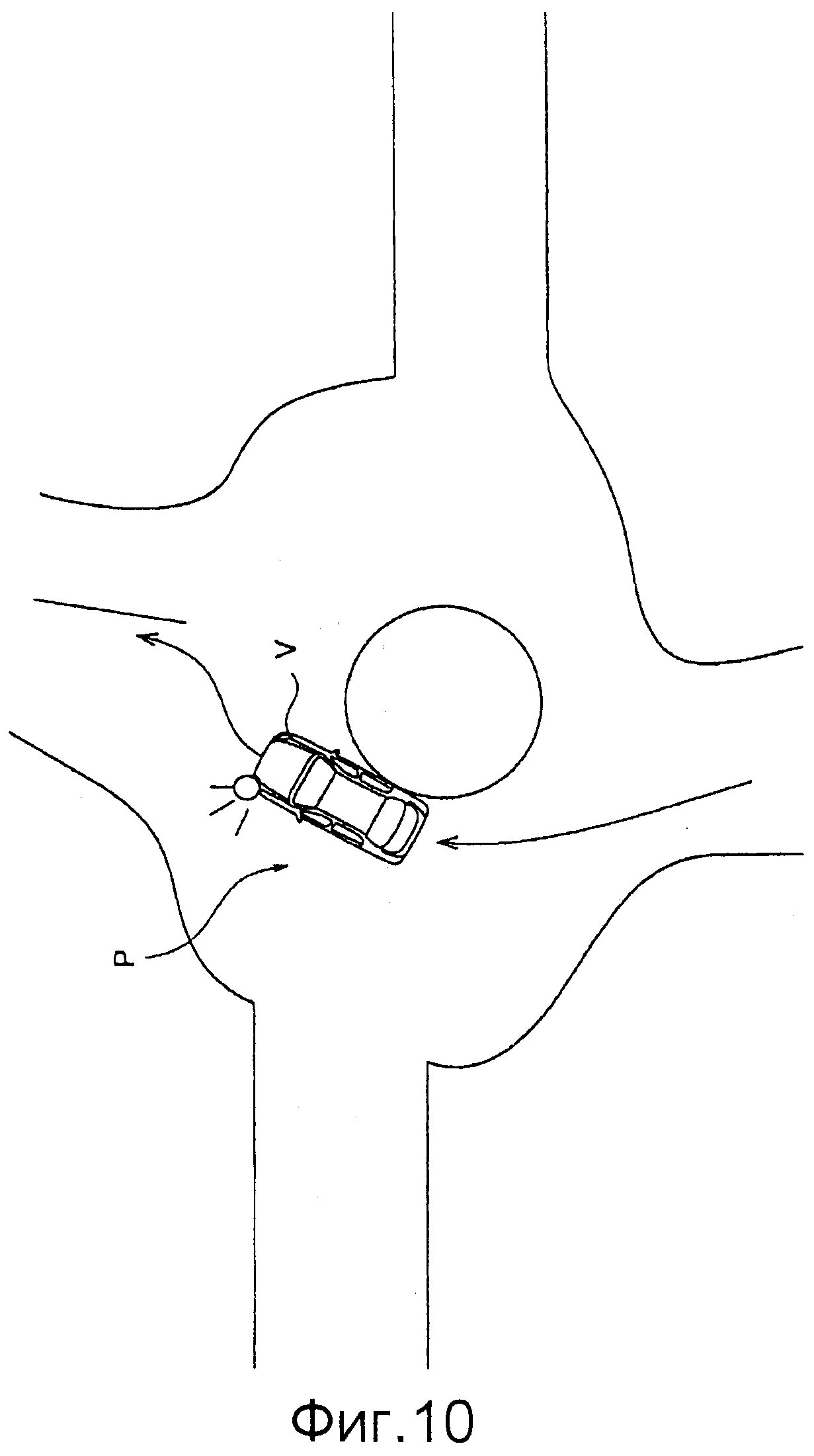
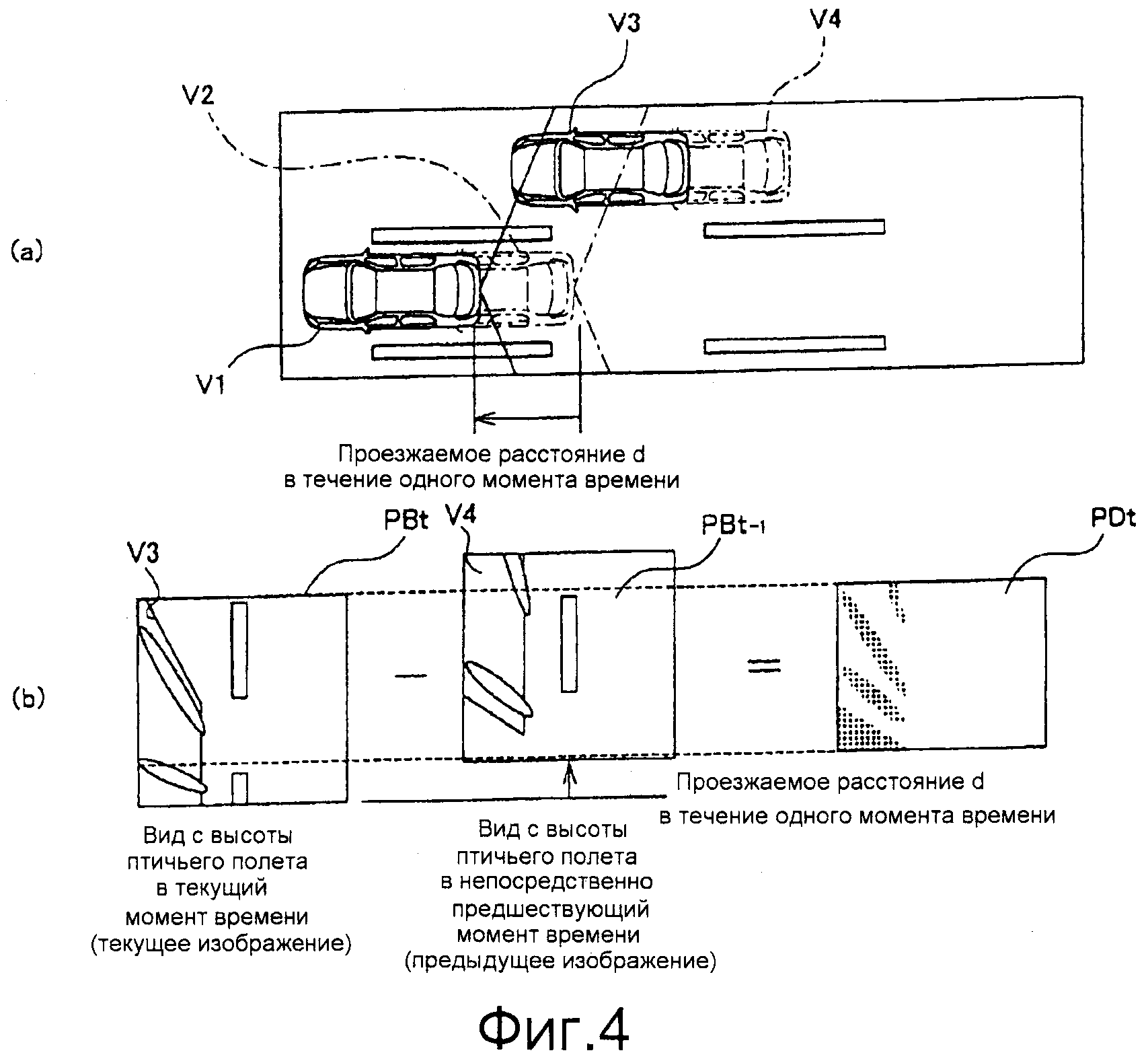
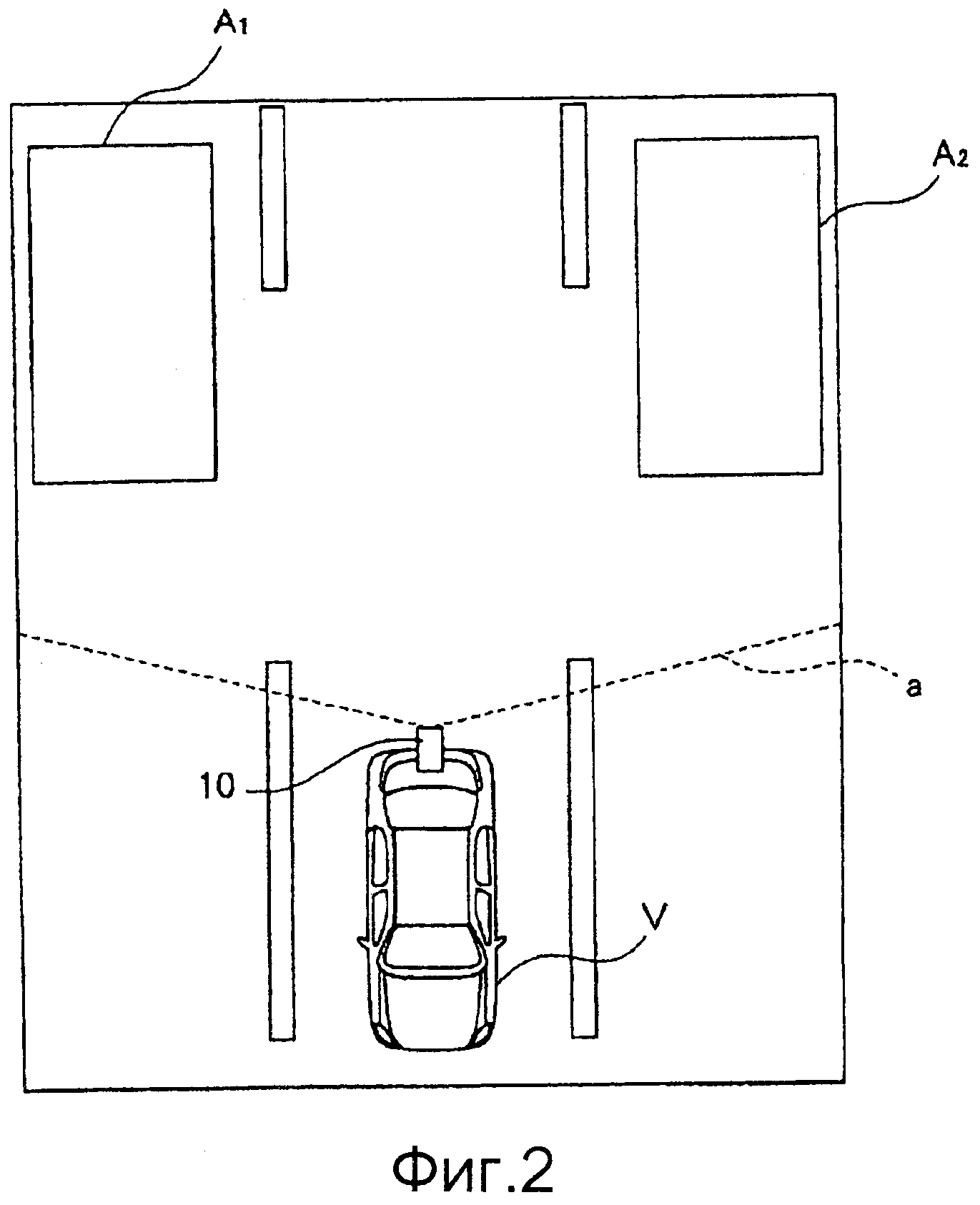
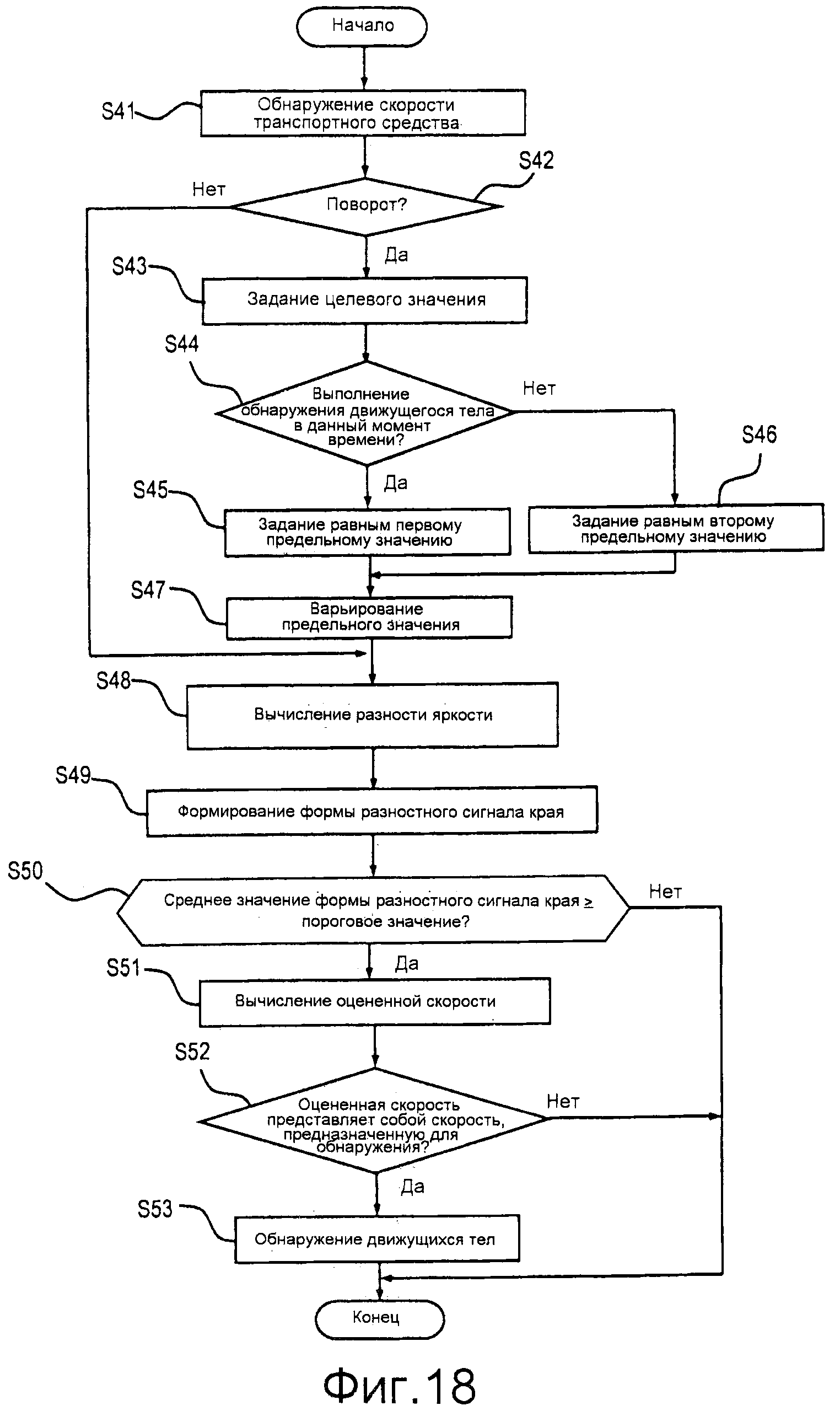
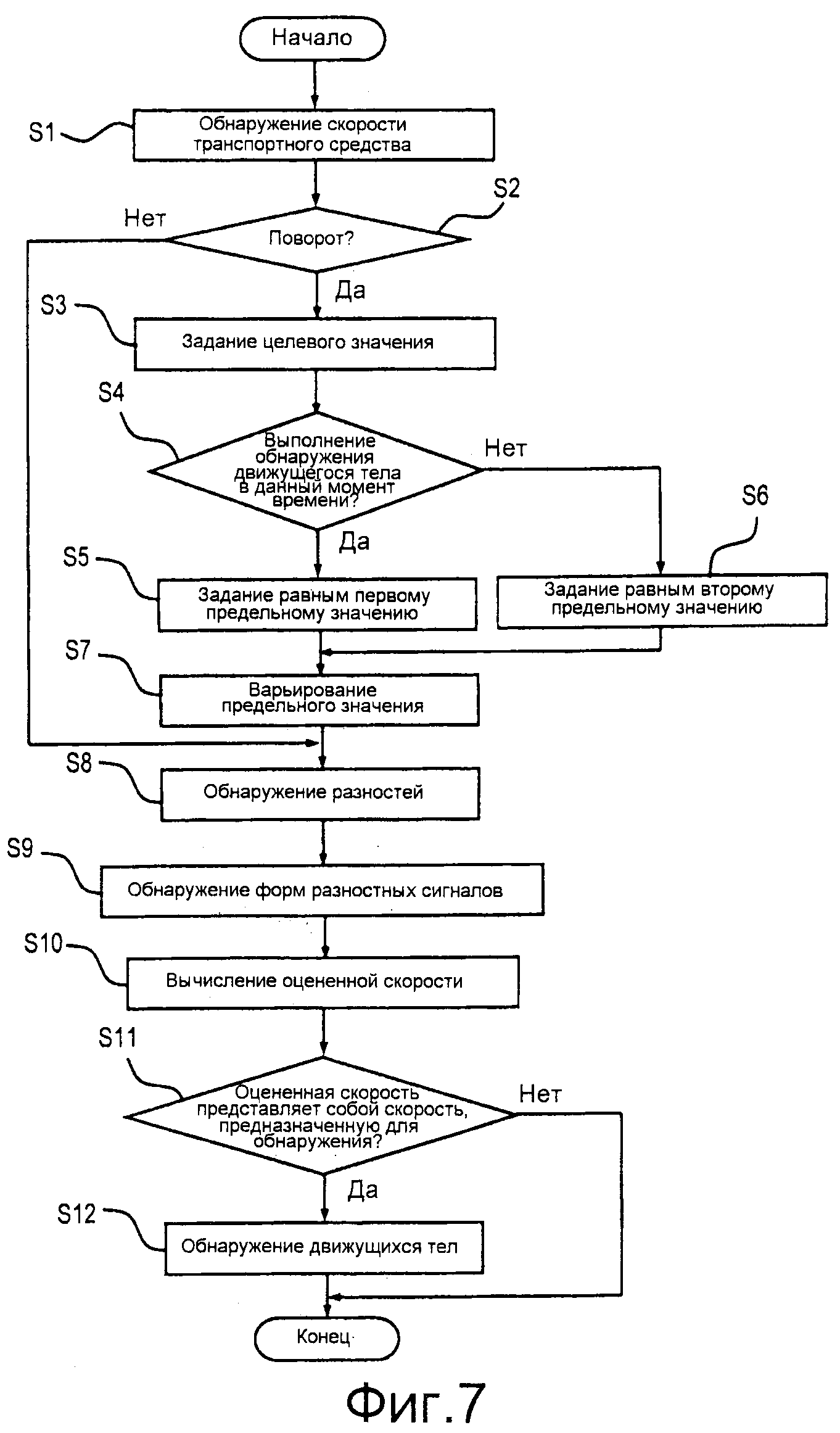
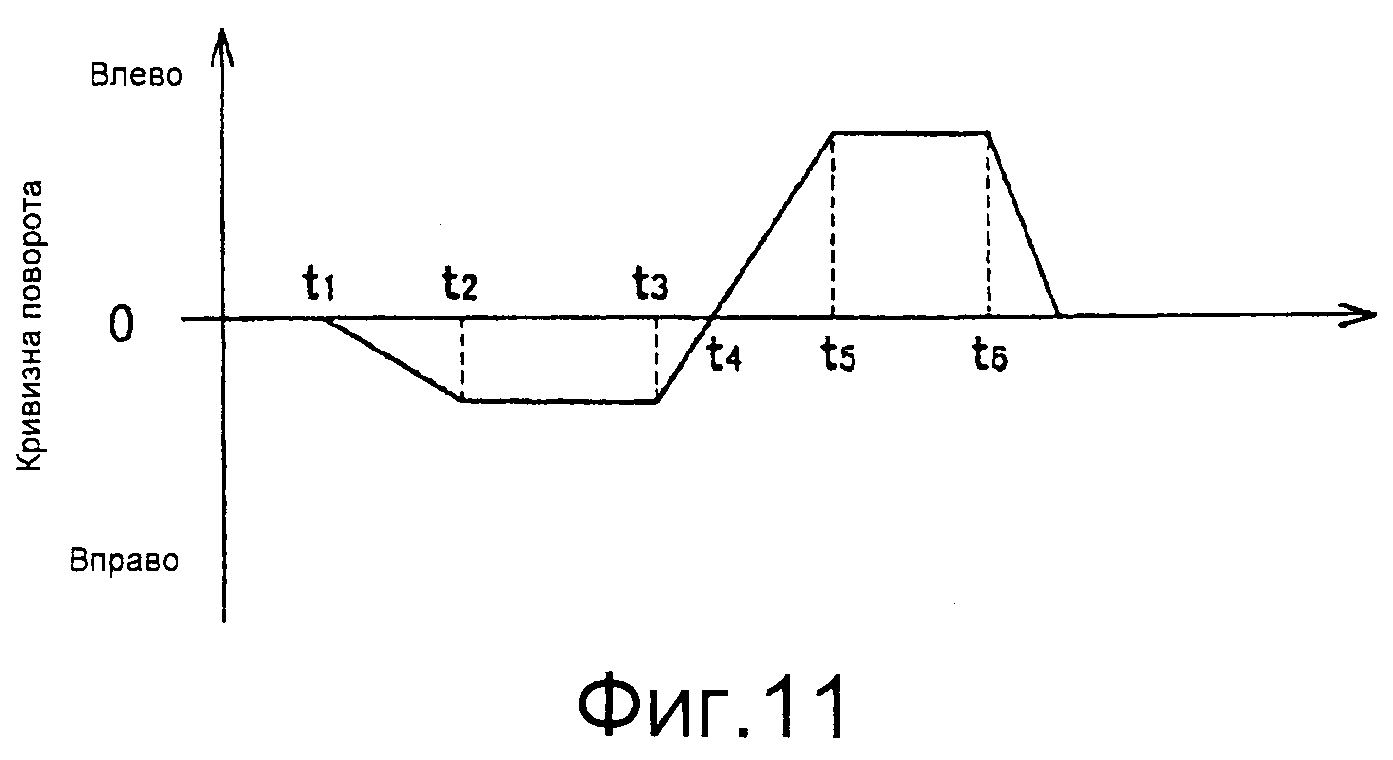
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

