Результат интеллектуальной деятельности: УСТРОЙСТВО ОБНАРУЖЕНИЯ СПЛОШНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ СПЛОШНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству обнаружения сплошных объектов и к способу обнаружения сплошных объектов.
Уровень техники
[0002] Ранее предлагались устройства для наблюдения периферии транспортного средства, которые используют радар для того, чтобы оценивать, имеется или нет сплошной объект в области обнаружения позади транспортного средства, и уведомлять водителя. В таком устройстве для наблюдения периферии транспортного средства, область обнаружения включает в себя местоположение, которое является мертвой зоной, по меньшей мере, для бокового зеркала, и когда угол бокового зеркала изменяется, позиция области обнаружения изменяется соответствующим образом (см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1.
Выложенная японская патентная публикация (Япония) номер 2000-149197
Сущность изобретения
Задачи, которые должны быть решены изобретением
[0004] Тем не менее, в устройстве, раскрытом в патентном документе 1, имеется вероятность, в зависимости от позиции транспортного средства в полосе движения, того, что не может обнаруживаться сплошной объект, такой как другое транспортное средство в смежной полосе движения. В качестве более подробного описания, в устройстве, раскрытом в патентном документе 1, область обнаружения является фиксированной при условии, что угол бокового зеркала не изменяется. В этом состоянии, например, в таких случаях, когда транспортное средство приближается к левой стороне полосы движения, и другое транспортное средство и т.п. на правой смежной полосе движения находится около правой стороны первой полосы движения, например, другое транспортное средство не входит в область обнаружения, и сплошной объект больше не может обнаруживаться.
[0005] Настоящее изобретение разработано, чтобы разрешать такие проблемы в предшествующем уровне техники, и цель изобретения заключается в том, чтобы предоставлять устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов, за счет которых может повышаться точность обнаружения сплошных объектов.
Средство для решения задач
[0006] Устройство обнаружения сплошных объектов настоящего изобретения захватывает изображение, включающее в себя разделительную линию и предварительно определенную область смежной полосы движения, и оценивает то, имеется или нет сплошной объект в предварительно определенной области. Из захваченного изображения устройство обнаружения сплошных объектов обнаруживает расстояние по ширине транспортного средства между позицией транспортного средства и разделительной линией в полосе движения, по которой движется транспортное средство, и размер предварительно определенной области, позиционированной на стороне, на которой находится разделительная линия, увеличивается больше наружу в направлении ширины транспортного средства в соответствии с большим расстоянием по ширине транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению, предварительно определенная область, в которой расстояние по ширине транспортного средства позиционировано на стороне, на которой находится разделительная линия, увеличивается дальше наружу в направлении ширины транспортного средства согласно увеличению расстояния по ширине транспортного средства между позицией транспортного средства и разделительной линией. Следовательно, можно исключать ситуации, в которых вследствие отделения транспортного средства от разделительной линии, например, предварительно определенная область не задается надлежащим образом для смежного транспортного средства, и сплошной объект, такой как другое транспортное средство, находится за пределами предварительно определенной области и не может быть обнаружен. Следовательно, может повышаться точность обнаружения сплошных объектов.
Краткое описание чертежей
[0008] Фиг. 1 является принципиальной схемой устройства обнаружения сплошных объектов согласно настоящему варианту осуществления, показывающей пример случая, в котором устройство обнаружения сплошных объектов устанавливается в транспортном средстве;
Фиг. 2 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1.
Фиг. 3 является блок-схемой, показывающей подробности компьютера, показанного на фиг. 1;
Фиг. 4 является чертежом для описания схемы процесса модуля позиционного совмещения, показанного на фиг. 3, при этом (a) показывает состояние движения транспортного средства V, а (b) показывает схему позиционного совмещения;
Фиг. 5 является принципиальной схемой, показывающей способ, которым формируются формы разностных сигналов посредством модуля формирования форм разностных сигналов, показанного на фиг. 3;
Фиг. 6 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1, и показывающим пример случая, в котором транспортное средство движется со смещением от центра в полосе движения;
Фиг. 7 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1, и показывающим пример случая, в котором модуль задания областей увеличивает область обнаружения;
Фиг. 8 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения;
Фиг. 9 является блок-схемой последовательности операций способа, показывающей способ обнаружения сплошных объектов согласно настоящему варианту осуществления;
Фиг. 10 является блок-схемой, показывающей подробности компьютера согласно второму варианту осуществления;
Фиг. 11 является видом сверху, показывающим состояние движения транспортного средства, когда ширина полосы движения является небольшой, и показывающим пример случая, в котором модуль задания областей увеличивает область обнаружения;
Фиг. 12 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения во втором варианте осуществления;
Фиг. 13 является блок-схемой последовательности операций способа, показывающей способ обнаружения сплошных объектов согласно второму варианту осуществления, показывающей первую половину процесса;
Фиг. 14 является блок-схемой последовательности операций способа, показывающей способ обнаружения сплошных объектов согласно второму варианту осуществления, показывающей вторую половину процесса;
Фиг. 15 является блок-схемой, показывающей подробности компьютера согласно третьему варианту осуществления;
Фиг. 16 является видом сверху, показывающим состояние движения транспортного средства во время смены полосы движения;
Фиг. 17 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения в третьем варианте осуществления;
Фиг. 18 является блок-схемой последовательности операций способа, показывающей способ обнаружения сплошных объектов согласно третьему варианту осуществления, показывающей первую половину процесса;
Фиг. 19 является блок-схемой последовательности операций способа, показывающей способ обнаружения сплошных объектов согласно третьему варианту осуществления, показывающей вторую половину процесса;
Фиг. 20 является блок-схемой, показывающей подробности компьютера 30 согласно четвертому варианту осуществления;
Фиг. 21 является принципиальной схемой, показывающей подробности процесса, выполняемого посредством модуля 37 обнаружения линий на земной поверхности;
Фиг. 22 является графиком, показывающим темпы увеличения областей множества форм DWt1-DWt4 разностных сигналов, показанных на фиг. 21(b);
Фиг. 23 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения в четвертом варианте осуществления;
Фиг. 24 является блок-схемой, показывающей подробности компьютера 30 согласно пятому варианту осуществления;
Фиг. 25 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения в пятом варианте осуществления;
Фиг. 26 является видом сверху, показывающим состояние движения транспортного средства, когда транспортное средство поворачивает;
Фиг. 27 является видом сверху, показывающим состояние движения транспортного средства в шестом варианте осуществления;
Фиг. 28 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения в шестом варианте осуществления;
Фиг. 29 является блок-схемой, показывающей подробности компьютера 30 согласно седьмому варианту осуществления;
Фиг. 30 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства до разделительной линии и размером (величиной увеличения) области обнаружения в седьмом варианте осуществления;
Фиг. 31 является блок-схемой, показывающей подробности компьютера 30 согласно восьмому варианту осуществления; и
Фиг. 32 является схемой для описания взаимосвязи между типом разделительной линии и размером (величиной увеличения) областей A1, A2 обнаружения.
Предпочтительные варианты осуществления изобретения
[0009] Первый вариант осуществления
Предпочтительные варианты осуществления настоящего изобретения описываются ниже на основе чертежей. Фиг. 1 является принципиальной схемой устройства 1 обнаружения сплошных объектов согласно настоящему варианту осуществления, показывающей пример случая, в котором устройство 1 обнаружения сплошных объектов устанавливается в транспортном средстве V. Устройство 1 обнаружения сплошных объектов, показанное на фиг. 1, обнаруживает сплошные объекты (например, другие транспортные средства, двухколесные транспортные средства и т.д.), движущиеся в смежной полосе движения, которая является смежной с данной полосой движения, на которой движется транспортное средство V, причем смежная полоса движения является смежной через разделительную линию в качестве границы; устройство 1 обнаружения сплошных объектов предоставляет различную информацию водителю транспортного средства V; и устройство 1 обнаружения сплошных объектов содержит камеру 10 (средство захвата изображений), датчик 20 скорости транспортного средства и компьютер 30. Термин "данная полоса движения", используемый ниже, означает зону движения, в которой может двигаться транспортное средство V, когда отсутствуют смены полосы движения, а также является областью, которая исключает разделительную линию. Одновременно, термин "смежная полоса движения" означает зону движения, смежную с данной полосой движения через разделительную линию, которая также является областью, которая исключает разделительную линию. Разделительная линия представляет собой такую линию, как белые линии и т.п., которые служат в качестве границы между данной полосой движения и смежной полосой движения.
[0010] Камера 10, показанная на фиг. 1, присоединяется в таком местоположении на высоте h в задней части транспортного средства V, что оптическая ось находится под углом θ вниз от горизонтали. Камера 10 выполнена с возможностью захватывать изображения области определения из этой позиции. Датчик 20 скорости транспортного средства обнаруживает скорость движения транспортного средства V, для которого применяется датчик и т.п., например, для считывания скорости вращения колес. На основе изображений, захваченных посредством камеры 10, компьютер 30 обнаруживает сплошные объекты (например, другие транспортные средства, двухколесные транспортные средства и т.д.), расположенные сзади транспортного средства V.
[0011] Устройство 1 обнаружения сплошных объектов также имеет предупреждающее устройство (не показано) и выдает предупреждения водителю транспортного средства V, например, в таких случаях, когда имеется вероятность вхождения в контакт с транспортным средством V в результате операции перемещения, обнаруженной посредством компьютера 30 .
[0012] Фиг. 2 является видом с высоты птичьего полета, показывающим состояние движения транспортного средства V, показанного на фиг. 1. Камера 10 допускает захват изображений области сзади транспортного средства V или конкретной области, включающей в себя разделительную линию и смежную полосу движения, как показано на фиг. 2. Области A1, A2 обнаружения (предварительно определенные участки) для обнаружения сплошных объектов, таких как другие транспортные средства, задаются в смежных полосах движения, которые являются смежными с данной полосой движения, в которой движется транспортное средство V, и компьютер 30 обнаруживает то, имеются или нет сплошные объекты в областях A1, A2 обнаружения. Такие области A1, A2 обнаружения задаются из своих относительных позиций относительно транспортного средства V.
[0013] Фиг. 3 является блок-схемой, показывающей подробности компьютера 30, показанного на фиг. 1. На фиг. 3 камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0014] Компьютер 30 содержит модуль 31 преобразования точки обзора, модуль 32 позиционного совмещения (средство позиционного совмещения) и модуль 33 обнаружения сплошных объектов (средство обнаружения сплошных объектов), как показано на фиг. 3.
[0015] Модуль 31 преобразования точки обзора вводит захваченные данные изображений, включающие в себя области A1, A2 обнаружения, полученные посредством захвата изображений, выполняемого посредством камеры 10, и преобразует точку обзора введенных захваченных данных изображений в данные изображений при виде с высоты птичьего полета, которые видны при просмотре с высоты птичьего полета. Такой вид с высоты птичьего полета представляет собой то, что должно быть видно с воображаемой камеры, смотрящей вертикально вниз, например, с воздуха. Это преобразование точки обзора выполняется, например, так, как раскрыто в выложенной японской патентной публикации № 2008-219063.
[0016] Модуль 32 позиционного совмещения последовательно вводит данные изображений при виде с высоты птичьего полета, полученные посредством преобразования точки обзора модуля 31 преобразования точки обзора, и сопоставляет с позицией введенных данных изображений при виде с высоты птичьего полета в другое время. Фиг. 4 является видом сверху, показывающим схему процесса модуля 32 позиционного совмещения, показанного на фиг. 3, при этом (a) показывает состояние движения транспортного средства V, а (b) показывает схему позиционного совмещения.
[0017] Как показано на фиг. 4(a), транспортное средство V в текущее время позиционируется в V1, и транспортное средство V во время на один период раньше позиционируется в V2. Другое транспортное средство V движется параллельно транспортному средству V в позиции сзади транспортного средства V, другое транспортное средство V в текущее время позиционируется в V3, и другое транспортное средство V во время на один период раньше позиционируется в V4. Кроме того, транспортное средство V перемещается на расстояние d за один момент времени. Термин "время на один период раньше" может означать время в прошлом от текущего времени с длительностью, устанавливаемой заранее (например, один цикл управления), либо он может означать время в прошлом с любой требуемой длительностью.
[0018] В этом состоянии, изображение PBt при виде с высоты птичьего полета в текущее время является таким, как показано на фиг. 4(b). В изображении PBt при виде с высоты птичьего полета белые линии, нарисованные на дороге, являются прямоугольными и находятся в состоянии сравнительно точной видимости сверху. Тем не менее, другое транспортное средство V3 начинает попадать в изображение. Аналогично, в изображении PBt-1 при виде с высоты птичьего полета во время на один период раньше, белые линии, нарисованные на дороге, являются прямоугольными и находятся в состоянии сравнительно точной видимости сверху, но другое транспортное средство V4 начинает попадать в изображение.
[0019] Модуль 32 позиционного совмещения реализует позиционное совмещение изображений PBt, PBt-1 при виде с высоты птичьего полета, описанных выше с точки зрения данных. В это время, модуль 32 позиционного совмещения смещает изображение PBt-1 при виде с высоты птичьего полета во время на один период раньше и вызывает совпадение позиции с изображением PBt при виде с высоты птичьего полета в текущее время. Величина d' смещения является просто величиной, соответствующей проезжаемому расстоянию d, показанному на фиг. 4(a), и определяется на основе сигнала из датчика 20 скорости транспортного средства и длительности от времени на один период раньше до текущего времени.
[0020] После позиционного совмещения модуль 32 позиционного совмещения находит разность между изображениями PBt, PBt-1 при виде с высоты птичьего полета и формирует данные разностного изображения PDt. Пикселное значение разностного изображения PDt может составлять абсолютное значение разности в пикселных значениях между изображениями PBt, PBt-1 при виде с высоты птичьего полета, или, чтобы соответствовать изменениям в окружении освещения, оно может составлять "1", когда абсолютное значение превышает предварительно определенное значение, и "0", когда абсолютное значение не превышает предварительно определенное значение.
[0021] Снова обратимся к фиг. 3. Кроме того, компьютер 30 содержит модуль 34 обнаружения поперечной позиции (средство обнаружения поперечной позиции). На основе захваченных данных изображений, захваченных посредством камеры 10, модуль 34 обнаружения поперечной позиции обнаруживает позицию транспортного средства (в частности, боковую поверхность транспортного средства V) в полосе движения, по которой движется транспортное средство V, и расстояние по ширине транспортного средства до разделительной линии, которая разделяет полосу движения. Модуль 34 обнаружения поперечной позиции позволяет компьютеру 30 обнаруживать, к примеру, то движется транспортное средство через центр данной полосы движения или движется ближе к левой или правой стороне.
[0022] Кроме того, модуль 33 обнаружения сплошных объектов обнаруживает сплошные объекты на основе данных разностного изображения PDt, к примеру, показанных на фиг. 4. Модуль 33 обнаружения сплошных объектов содержит модуль 33a формирования форм разностных сигналов (средство формирования форм разностных сигналов) и модуль 33b задания областей (средство задания областей).
[0023] Фиг. 5 является принципиальной схемой, показывающей способ, которым формируются формы разностных сигналов посредством модуля 33a формирования форм разностных сигналов, показанного на фиг. 3. Модуль 33a формирования форм разностных сигналов формирует форму DWt разностного сигнала из частей в разностном изображении PDt, которые являются эквивалентными областям A1, A2 обнаружения, как показано на фиг. 5. В это время, модуль 33a формирования форм разностных сигналов формирует форму DWt разностного сигнала вдоль направления, в котором сплошной объект попадает в поле зрения, посредством преобразования точки обзора. В примере, показанном на фиг. 5, описание использует только область A1 обнаружения для удобства.
[0024] В качестве конкретного описания, сначала модуль 33a формирования форм разностных сигналов задает линию La вдоль направления, в котором сплошной объект попадает в поле зрения в данных формы DWt разностного сигнала. Модуль 33a формирования форм разностных сигналов затем подсчитывает число разностных пикселов DP, представляющих предварительно определенные разности вдоль линии La. Разностные пикселы DP, представляющие предварительно определенные разности в данном документе, являются пикселами, превышающими предварительно определенное значение, когда пикселное значение формы DWt разностного сигнала является абсолютным значением разности между пикселными значениями изображений PBt, PBt-1 при виде с высоты птичьего полета, и разностные пикселы DP являются пикселами, представляющими "1", когда пикселное значение формы DWt разностного сигнала выражается как "0" и "1".
[0025] После подсчета числа разностных пикселов DP модуль 33a формирования форм разностных сигналов находит точку CP пересечения линии La и линии L1. Модуль 33a формирования форм разностных сигналов коррелирует точку CP пересечения и подсчитанное число, определяет позицию на горизонтальной оси (позицию на оси сверху вниз на плоскости изображений по фиг. 5) и определяет позицию на вертикальной оси (позицию на оси слева направо на плоскости изображений по фиг. 5) из подсчитанного числа.
[0026] Модуль 33a формирования форм разностных сигналов продолжает аналогично задавать линию вдоль направления, в котором сплошной объект попадает в поле зрения, подсчитывать число разностных пикселов DP, определять позицию на горизонтальной оси, на основе позиции точки CP пересечения и определять позицию на вертикальной оси из подсчитанного числа (числа разностных пикселов DP). Модуль 33 обнаружения сплошных объектов формирует форму DW разностного сигнала посредством последовательного повторения вышеуказанного процесса и создания частотного распределения.
[0027] Как показано на фиг. 5, линии La и Lb в направлении попадания в поле зрения сплошного объекта перекрывают область A1 обнаружения в различных расстояниях. Следовательно, при условии, что область A1 обнаружения заполнена разностными пикселами DP, линия La имеет больше разностных пикселов DP, чем линия Lb. Следовательно, при определении позиции на вертикальной оси из подсчитанного числа разностных пикселов DP, модуль 33a формирования форм разностных сигналов нормализует позицию на вертикальной оси на основе расстояния, посредством которого перекрываются линии La, Lb в направлении попадания в поле зрения сплошного объекта и область A1 обнаружения. В качестве конкретного примера, имеется шесть разностных пикселов DP на линии La на фиг. 5, и на линии Lb имеется пять разностных пикселов DP. Следовательно, при определении позиции на вертикальной оси из подсчитанного числа на фиг. 5, модуль 33a формирования форм разностных сигналов нормализует позицию на вертикальной оси посредством способа, к примеру, деления подсчитанного числа на расстояние перекрытия. Значения формы DWt разностного сигнала, которые соответствуют линиям La, Lb в направлении попадания в поле зрения сплошного объекта, в силу этого практически равны, как показано в форме DWt разностного сигнала.
[0028] Когда форма DWt разностного сигнала формируется так, как описано выше, модуль 33 обнаружения сплошных объектов обнаруживает сплошной объект на основе данных формы DWt разностного сигнала. В это время, модуль 34 обнаружения поперечной позиции сначала вычисляет оцененную скорость сплошного объекта посредством корреляции формы DWt-1 разностного сигнала во время на один период раньше и текущей формы DWt разностного сигнала. Когда сплошной объект является другим транспортным средством V, например, форма DW разностного сигнала с большой вероятностью имеет два локальных максимальных значения, поскольку разностные пикселы DP легко получаются в частях шин другого транспортного средства V. Следовательно, относительная скорость другого транспортного средства V относительно транспортного средства V может рассчитываться посредством нахождения несоответствия между локальными максимальными значениями формы DWt-1 разностного сигнала во время на один период раньше и текущей формы DWt разностного сигнала. Модуль 34 обнаружения поперечной позиции в силу этого находит оцененную скорость сплошного объекта. Модуль 34 обнаружения поперечной позиции оценивает то, является или нет сплошной объект сплошным объектом, посредством оценки того, является или нет оцененная скорость сплошного объекта надлежащей скоростью для сплошного объекта.
[0029] Модуль 33b задания областей задает размеры областей A1, A2 обнаружения, показанных на фиг. 2. Чем больше расстояние по ширине транспортного средства до разделительной линии, обнаруженное посредством модуля 34 обнаружения поперечной позиции, тем дальше наружу в направлении ширины транспортного средства модуль 33b задания областей увеличивает размер области A1 или A2 обнаружения, размещаемой на стороне, на которой находится разделительная линия.
[0030] Фиг. 6 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1, и показывающим пример случая, в котором транспортное средство V движется со смещением от центра в полосе движения. Как показано на фиг. 6, транспортное средство V движется со смещением от центра в полосе движения и движется около разделительной линии слева от транспортного средства (слева с точки зрения водителя).
[0031] В этом случае, как показано на фиг. 6, когда другое транспортное средство V движется на расстоянии от другой разделительной линии (разделительной линии справа с точки зрения водителя), другое транспортное средство V становится размещенным не в области A1 обнаружения, расположенной справа с точки зрения водителя. Следовательно, в настоящем варианте осуществления, модуль 33b задания областей увеличивает область A1 обнаружения, чтобы не допускать ситуаций, которые вызывают ошибки при обнаружении.
[0032] Фиг. 7 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1, и показывающим пример случая, в котором модуль 33b задания областей увеличивает область A1 обнаружения. Область A1 обнаружения увеличивается посредством модуля 33b задания областей, как показано на фиг. 7. Другое транспортное средство V в силу этого становится размещенным в области A1 обнаружения, и могут исключаться ошибки при обнаружении другого транспортного средства V.
[0033] Фиг. 8 является графиком, показывающим взаимосвязь между расстоянием Δy по ширине транспортного средства до разделительной линии и размером области A1 обнаружения (величиной Δy0fs увеличения).
[0034] Когда расстояние Δy по ширине транспортного средства до разделительной линии находится между нулем и y1, как показано на фиг. 8, величина увеличения области A1 обнаружения является нулем. Когда расстояние Δy по ширине транспортного средства находится между y1 и y2, величина увеличения области A1 обнаружения возрастает согласно размеру расстояния Δy по ширине транспортного средства. Кроме того, когда расстояние Δy по ширине транспортного средства превышает y2, величина увеличения области A1 обнаружения фиксируется на y0fs'. Таким образом, причина, по которой величина увеличения области A1 обнаружения фиксируется на конкретном значении y0fs', состоит в том, что когда область A1 обнаружения увеличивается без ограничений, имеется вероятность того, что область A1 обнаружения охватывает не только смежную полосу движения, но также и последующие полосы движения.
[0035] На фиг. 8, величина увеличения области A1 обнаружения сравнительно увеличивается в интервале расстояния Δy по ширине транспортного средства между y1 и y2, но это увеличение не ограничено конкретным образом пропорциональным увеличением и может быть экспоненциальным увеличением и т.п. Как очевидно из фиг. 8, когда расстояние Δy по ширине транспортного средства до разделительной линии является небольшим, область A1 обнаружения, которая увеличена, затем сужается.
[0036] Вышеприведенное описание использует только область A1 обнаружения, но оно применимо также к области A2 обнаружения. В примере, показанном на фиг. 8, область A1 обнаружения увеличивается на основе расстояния Δy по ширине транспортного средства от правой боковой поверхности транспортного средства (правой боковой поверхности с точки зрения водителя) до разделительной линии справа, но когда размер области A2 обнаружения варьируется, разумеется, область обнаружения определяется на основе расстояния Δy по ширине транспортного средства от левой боковой поверхности транспортного средства (левой боковой поверхности с точки зрения водителя) до разделительной линии слева.
[0037] Кроме того, модуль 33b задания областей выполнен с возможностью несущественно варьировать области A1, A2 обнаружения. Это обусловлено тем, что когда области A1, A2 обнаружения существенно варьируются, обнаружение сплошных объектов становится нестабильным, и имеется вероятность того, что это приводит к ошибкам при обнаружении сплошных объектов.
[0038] В частности, модуль 33b задания областей спроектирован таким образом, что величина варьирования, когда области A1, A2 обнаружения варьируются, не превышает предельное значение (предписанное значение увеличения или предписанное значение). В качестве более конкретного описания, модуль 33b задания областей находит целевое значение для размеров областей A1, A2 обнаружения на основе графика, показанного на фиг. 8. Модуль 33b задания областей затем последовательно приближает размеры областей A1, A2 ближе к целевому значению в пределах диапазона, который не превышает предельное значение.
[0039] Предельное значение увеличения (предписанное значение увеличения), которое является предельным значением, когда области A1, A2 обнаружения увеличиваются, задается меньше предельного значения сужения (предписанного значения), которое является предельным значением, когда области A1, A2 обнаружения сужаются. Области A1, A2 обнаружения при сужении за счет этого не сужаются существенно, и можно не допускать ситуаций, в которых другое транспортное средство V выходит из областей A1, A2 обнаружения и не может быть обнаружено вследствие существенно суженных областей A1, A2 обнаружения.
[0040] Модуль 33b задания областей уменьшает предельное значение таким образом, что оно меньше тогда, когда сплошной объект обнаруживается, чем тогда, когда сплошной объект не обнаруживается. Это обусловлено тем, что можно не допускать ситуаций, в которых обнаруживаемое другое транспортное средство V выходит из областей A1, A2 обнаружения и не может быть обнаружено вследствие существенно суженных областей A1, A2 обнаружения.
[0041] Далее описывается способ обнаружения сплошных объектов согласно настоящему варианту осуществления. Фиг. 9 является блок-схемой последовательности операций способа, показывающей способ обнаружения сплошных объектов согласно настоящему варианту осуществления.
[0042] Во-первых, как показано на фиг. 9, модуль 34 обнаружения поперечной позиции обнаруживает расстояние Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией (S1). В это время, модуль 34 обнаружения поперечной позиции обнаруживает расстояние Δy по ширине транспортного средства на основе данных изображений, захваченных посредством камеры 10. В настоящем варианте осуществления, поскольку области A1, A2 обнаружения задаются сзади слева и справа от транспортного средства V, модуль 34 обнаружения поперечной позиции обнаруживает расстояние Δy по ширине транспортного средства как между левой и правой боковыми поверхностями транспортного средства V, так и между левой и правой разделительными линиями. Для удобства в нижеприведенном описании, описание использует только одну область A1 обнаружения в качестве примера, но оно применимо также к другой области A2 обнаружения.
[0043] Затем, модуль 33b задания областей задает целевое значение области A1 обнаружения (S2). В это время, модуль 33b задания областей задает целевое значение на основе данных графика, описанных со ссылкой на фиг. 8. Затем, модуль 33 обнаружения сплошных объектов оценивает то, осуществляется или нет обнаружение сплошных объектов в данный момент (S3).
[0044] Когда оценено, что обнаружение сплошных объектов осуществляется (S3: "Да"), модуль 33b задания областей задает предельное значение, которое является верхним пределом величины варьирования области A1 обнаружения, в качестве первого предельного значения (S4). Процесс затем переходит к этапу S6. Когда оценено, что обнаружение сплошных объектов не осуществляется (S3: "Нет"), модуль 33b задания областей задает предельное значение, которое является верхним пределом величины варьирования области A1 обнаружения, в качестве второго предельного значения (S5). Процесс затем переходит к этапу S6. Первое предельное значение в данном документе меньше второго предельного значения. Следовательно, существенные изменения в области A1 обнаружения дополнительно не допускаются в ходе обнаружения сплошных объектов.
[0045] На этапе S6 модуль 33 обнаружения сплошных объектов оценивает то, сужается или нет область A1 обнаружения, на основе целевого значения, рассчитанного на этапе S2 (S6). Когда оценено, что область A1 обнаружения сужается (S6: "Да"), модуль 33b задания областей понижает предельное значение, заданное на этапах S4 и S5 (S7). Существенные изменения в области A1 обнаружения за счет этого могут дополнительно подавляться, когда область A1 обнаружения сужается. Процесс затем переходит к этапу S8. Когда оценено, что область A1 обнаружения не сужается (S6: "Нет"), т.е. когда область A1 обнаружения увеличивается, модуль 33b задания областей не понижает предельное значение, заданное на этапах S4 и S5, и процесс переходит к этапу S8.
[0046] На этапе S8 модуль 33b задания областей изменяет размер области A1 обнаружения (S8). В это время, модуль 33b задания областей увеличивает или сужает размер области A1 обнаружения в пределах диапазона, который не превышает предельное значение, полученное через процесс, описанный выше.
[0047] Затем, компьютер 30 обнаруживает скорость транспортного средства на основе сигнала из датчика 20 скорости транспортного средства (S9). Затем, модуль 32 позиционного совмещения обнаруживает разность (S10). В это время, модуль 32 позиционного совмещения формирует данные разностного изображения PDt, как описано со ссылкой на фиг. 4.
[0048] Затем, модуль 33a формирования форм разностных сигналов формирует форму DW разностного сигнала (S11) способом, описанным со ссылкой на фиг. 5, на основе разностного изображения PDt, сформированного на этапе S10. Модуль 33 обнаружения сплошных объектов затем вычисляет оцененную скорость сплошного объекта (S12) посредством корреляции формы DWt-1 разностного сигнала во время на один период раньше и текущей формы DWt разностного сигнала.
[0049] Модуль 33 обнаружения сплошных объектов затем оценивает то, является или нет оцененная скорость, вычисленная на этапе S12, целью обнаружения (S13). В настоящем варианте осуществления, устройство 1 обнаружения сплошных объектов обнаруживает другое транспортное средство, двухколесное транспортное средство и т.п., которое имеет вероятность контакта во время смены полосы движения. Следовательно, модуль 33 обнаружения сплошных объектов оценивает то, является или нет оцененная скорость подходящей в качестве скорости для другого транспортного средства, двухколесного транспортного средства и т.п., на этапе S13.
[0050] Когда оценено, что оцененная скорость является надлежащей в качестве скорости другого транспортного средства, двухколесного транспортного средства и т.п. (S13: "Да"), модуль 33 обнаружения сплошных объектов оценивает то, что сплошной объект, указываемый посредством формы DWt разностного сигнала, является сплошным объектом (другим транспортным средством, двухколесным транспортным средством и т.п.), который может быть целью обнаружения (S14). После этого, процесс, показанный на фиг. 9, завершается. Когда оценено, что оцененная скорость не является надлежащей в качестве скорости другого транспортного средства, двухколесного транспортного средства и т.п. (S13: "Нет"), модуль 33 обнаружения сплошных объектов оценивает то, что сплошной объект, указываемый посредством формы DWt разностного сигнала, не является сплошным объектом, который может быть целью обнаружения, и процесс, показанный на фиг. 9, завершается.
[0051] Таким образом, согласно устройству 1 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно настоящему варианту осуществления, чем больше расстояние Δy по ширине транспортного средства между позицией транспортного средства и разделительной линией, тем дальше наружу в направлении ширины транспортного средства находится область A1 или A2 обнаружения, размещаемая на стороне, на которой находится разделительная линия; поэтому, можно не допускать ситуаций, в которых вследствие отделения транспортного средства V от разделительной линии, например, область A1 или A2 обнаружения не задается надлежащим образом для смежного транспортного средства, и сплошной объект, такой как другое транспортное средство, находится за пределами области A1 или A2 обнаружения, и этот объект не может обнаруживаться. Следовательно, может повышаться точность обнаружения сплошных объектов.
[0052] Размеры областей A1, A2 обнаружения увеличиваются на предельное значение увеличения, и увеличенные области A1, A2 обнаружения затем сужаются внутрь в направлении ширины транспортного средства на предельное значение сужения, меньшее предельного значения увеличения; поэтому, когда области A1, A2 обнаружения сужаются, можно не допускать существенного изменения областей A1, A2 обнаружения, и дополнительно могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении.
[0053] Когда сплошной объект обнаруживается, предельное значение уменьшается до значения меньше, чем тогда, когда сплошной объект не обнаруживается. В частности, поскольку предельное значение сужения уменьшается до значения, меньшего предельного значения увеличения, можно не допускать, к примеру, таких ситуаций, когда размеры областей A1, A2 обнаружения существенно сужаются в ходе обнаружения сплошных объектов, и области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0054] Второй вариант осуществления
Далее описывается второй вариант осуществления настоящего изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно второму варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0055] Фиг. 10 является блок-схемой, показывающей подробности компьютера 30 согласно второму варианту осуществления. На фиг. 10, камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0056] Компьютер 30 согласно второму варианту осуществления содержит модуль 35 обнаружения ширины полос движения (средство обнаружения ширины), как показано на фиг. 10. Модуль 35 обнаружения ширины полос движения обнаруживает ширину полосы движения для данной полосы движения. Модуль 35 обнаружения ширины полос движения обнаруживает ширину полосы движения данной дороги на основе захваченных данных изображений, снятых посредством камеры 10. Модуль 35 обнаружения ширины полос движения также может обнаруживать ширину полосы движения для смежной полосы движения и использовать эту ширину в качестве ширины полосы движения для данной полосы движения. Это обусловлено тем, что ширины полосы движения по существу являются одинаковыми для дороги.
[0057] Состояние движения транспортного средства, когда ширина полосы движения является небольшой, описано в данном документе со ссылкой на фиг. 11. Фиг. 11 является видом сверху, показывающим состояние движения транспортного средства, когда ширина полосы движения является небольшой, и показывает пример случая, в котором модуль 33b задания областей увеличивает область A1 обнаружения. Когда ширина полосы движения является небольшой, и область A1 обнаружения увеличивается идентично первому варианту осуществления, возникают случаи, в которых другое транспортное средство V в смежной полосе движения входит в область A1 обнаружения, как показано на фиг. 11. Когда обнаружение сплошных объектов выполняется на основе такой области A1 обнаружения, точность обнаружения сплошных объектов снижается. То же применимо к области A2 обнаружения.
[0058] Во втором варианте осуществления, чем меньше ширина полосы движения, обнаруженная посредством модуля 35 обнаружения ширины полос движения, тем меньшей модуль 33b задания областей задает величину увеличения при увеличении размеров областей A1, A2 обнаружения наружу в направлении ширины транспортного средства.
[0059] Фиг. 12 является графиком, показывающим взаимосвязь между расстоянием Δy по ширине транспортного средства до разделительной линии и размером (величиной Δy0fs увеличения) области A1 обнаружения во втором варианте осуществления.
[0060] Когда расстояние Δy по ширине транспортного средства находится между y1 и y2, величина увеличения области A1 обнаружения увеличивается согласно размеру расстояния Δy по ширине транспортного средства, как показано на фиг. 12, но величина увеличения является меньшей в примере, показанном на фиг. 8. В частности, модуль 33b задания областей согласно второму варианту осуществления спроектирован с возможностью не допускать слишком сильного увеличения области A1 обнаружения посредством уменьшения величины увеличения при увеличении областей A1, A2 обнаружения. Это не допускает задание области A1 обнаружения в последующих полосах движения и снижение точности обнаружения сплошных объектов.
[0061] Во втором варианте осуществления, максимальный предел y0fs' предпочтительно уменьшается до значения, меньшего, чем в примере, показанном на фиг. 8. Это обусловлено тем, что за счет этого можно дополнительно не допускать задания области A1 обнаружения в последующих полосах движения.
[0062] Далее описывается способ обнаружения сплошных объектов согласно второму варианту осуществления. Фиг. 13 и 14 являются блок-схемами последовательности операций способа, показывающими способ обнаружения сплошных объектов согласно второму варианту осуществления.
[0063] Во-первых, модуль 35 обнаружения ширины полос движения обнаруживает ширину полосы движения для данной полосы движения на основе данных изображений, захваченных посредством камеры 10 (S21). Модуль 33b задания областей затем задает величину увеличения (S22). В частности, чем меньше ширина полосы движения, тем больше модуль 33b задания областей уменьшает величину увеличения согласно расстоянию Δy по ширине транспортного средства, как показано на фиг. 12. В этом процессе модуль 33b задания областей также предпочтительно уменьшает максимальный предел y0fs'.
[0064] На этапах S23-S36, выполняется процесс, идентичный процессу на этапах S1-S14, показанному на фиг. 9.
[0065] Таким образом, согласно устройству 2 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно второму варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0066] Согласно второму варианту осуществления, чем меньше ширина полосы движения для данной полосы движения, тем меньше величина увеличения, когда размеры областей A1, A2 обнаружения увеличиваются. Следовательно, в случаях, в которых ширина полосы движения является небольшой, можно не допускать ситуаций, в которых области A1, A2 обнаружения задаются не в смежной полосе движения, а в последующей полосе движения.
[0067] Третий вариант осуществления
Далее описывается третий вариант осуществления изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно третьему варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0068] Фиг. 15 является блок-схемой, показывающей подробности компьютера 30 согласно третьему варианту осуществления. На фиг. 15, камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0069] Компьютер 30 согласно третьему варианту осуществления содержит модуль 36 обнаружения смены полосы движения (средство обнаружения варьирования полосы движения), как показано на фиг. 15. Модуль 36 обнаружения смены полосы движения обнаруживает смены полосы движения посредством транспортного средства V, вычисляет величину близости к разделительной линии на основе данных изображений, полученных, например, посредством захвата изображений, выполняемого посредством камеры 10, и оценивает то, сменяет или нет транспортное средство V полосу движения. Модуль 36 обнаружения смены полосы движения не ограничивается вышеуказанным процессом и может оценивать смены полосы движения из величины руления или посредством некоторого другого способа.
[0070] В частности, модуль 36 обнаружения смены полосы движения обнаруживает то, что транспортное средство V сменяет полосу движения, когда боковая поверхность транспортного средства V находится в пределах предварительно определенного расстояния (например, 10 см) от разделительной линии. Модуль 36 обнаружения смены полосы движения также может быть спроектирован с возможностью обнаруживать то, что транспортное средство V не сменяет полосу движения, когда боковая поверхность транспортного средства находится в пределах предварительно определенного расстояния от разделительной линии, но, с другой стороны, отделена от разделительной линии, по меньшей мере, на предварительно определенное расстояние. Кроме того, модуль 36 обнаружения смены полосы движения может оценивать то, что смена полосы движения закончена, когда транспортное средство отделено от разделительной линии, по меньшей мере, на предварительно определенное расстояние после смены полосы движения (т.е. когда транспортное средство отделено от разделительной линии, по меньшей мере, на предварительно определенное расстояние после пересечения разделительной линии посредством смены полосы движения).
[0071] Способ, которым транспортное средство сменяет полосу движения, описывается со ссылкой на фиг. 16. Фиг. 16 является видом сверху, показывающим данную полосу движения транспортного средства, когда транспортное средство сменяет полосу движения. Как показано на фиг. 16, транспортное средство V позиционируется в центре полосы движения (см. символ Va), и транспортное средство затем сменяет полосу движения и достигает позиции Vb. В это время, расстояние Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией временно является большим. Следовательно, область A1 обнаружения увеличивается, и имеется вероятность вхождения другого транспортного средства V в последующей полосе движения в область A1 обнаружения. В таких случаях, точность обнаружения сплошных объектов уменьшается.
[0072] С учетом этого, в третьем варианте осуществления, когда смена полосы движения, выполняемая транспортным средством V, обнаруживается посредством модуля 36 обнаружения смены полосы движения в течение определенной длительности, модуль 33b задания областей уменьшает величину увеличения, когда размеры областей A1, A2 обнаружения увеличиваются. В частности, когда смена полосы движения, выполняемая транспортным средством V, обнаруживается посредством модуля 36 обнаружения смены полосы движения в течение определенной длительности, модуль 33b задания областей уменьшает величину Δy0fs увеличения области A1 или A2 обнаружения относительно расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V, показанного на фиг. 16, и разделительной линией. В частности, в течение определенной длительности, когда обнаруживается смена полосы движения, выполняемая транспортным средством V, модуль 33b задания областей уменьшает величину Δy0fs увеличения области A1 или A2 обнаружения относительно расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией таким образом, что она меньше, чем до смены полосы движения, как показано на фиг. 17. За счет этого можно не допускать ситуаций, в которых область A1 или A2 обнаружения временно увеличивается слишком существенно во время смены полосы движения. Фиг. 17 является графиком, показывающим взаимосвязь между расстоянием по ширине транспортного средства и размером области обнаружения (величиной Δy0fs увеличения) в третьем варианте осуществления.
[0073] Далее описывается способ обнаружения сплошных объектов согласно третьему варианту осуществления. Фиг. 18 и 19 являются блок-схемами последовательности операций способа, показывающими способ обнаружения сплошных объектов согласно третьему варианту осуществления.
[0074] Во-первых, на основе данных изображений, захваченных посредством камеры 10, модуль 36 обнаружения смены полосы движения вычисляет величину близости к разделительной линии и оценивает то, сменяет или нет транспортное средство V полосу движения (S41). Когда оценено, что транспортное средство V не сменяет полосу движения (S41: "Нет"), процесс переходит к этапу S43. Когда оценено, что транспортное средство V сменяет полосу движения (S41: "Да"), модуль 33b задания областей задает величину увеличения (S42). В частности, модуль 33b задания областей уменьшает величину увеличения согласно расстоянию Δy по ширине транспортного средства, как показано на фиг. 17. В этом процессе модуль 33b задания областей также предпочтительно уменьшает максимальный предел y0fs'.
[0075] На этапах S43-S56, выполняется процесс, идентичный процессу на этапах S1-S14, показанному на фиг. 9.
[0076] Таким образом, согласно устройству 3 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно третьему варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0077] Согласно третьему варианту осуществления, когда обнаруживается смена полосы движения, выполняемая транспортным средством V, уменьшается величина увеличения для увеличения размеров областей A1, A2 обнаружения. Следовательно, можно не допускать ситуаций, в которых в момент, когда транспортное средство временно находится около разделительной линии при смене полосы движения, области A1, A2 обнаружения задаются не в смежной полосе движения, а в последующей полосе движения.
[0078] Четвертый вариант осуществления
Далее описывается четвертый вариант осуществления настоящего изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно четвертому варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0079] Фиг. 20 является блок-схемой, показывающей подробности компьютера 30 согласно четвертому варианту осуществления. На фиг. 20 камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0080] Компьютер 30 согласно четвертому варианту осуществления содержит модуль 37 обнаружения линий на земной поверхности, как показано на фиг. 20. Модуль 37 обнаружения линий на земной поверхности обнаруживает позиции, в которых шины другого транспортного средства V, движущегося на смежной полосе движения (позиции в направлении ширины транспортного средства), в качестве линий на земной поверхности. Подробности описываются ниже с использованием фиг. 21 и 22. Фиг. 21 и 22 являются схемами для описания способа обнаружения линий на земной поверхности посредством модуля 37 обнаружения линий на земной поверхности.
[0081] Во-первых, модуль 37 обнаружения линий на земной поверхности задает множество линий L1-Ln в различных позициях в области A1 или A2 обнаружения, причем линии являются практически параллельным с направлением движения транспортного средства V. Например, в примере, показанном на фиг. 21, модуль 37 обнаружения линий на земной поверхности задает четыре практически параллельные линии. Нижеприведенное описание использует четыре практически параллельные линии L1-L4 в качестве примера, но линии не ограничены этим примером, и может быть две, три, пять или более параллельных линий.
[0082] Модуль 37 обнаружения линий на земной поверхности затем вынуждает модуль 33a формирования форм разностных сигналов формировать формы DWt разностных сигналов для заданных линий L1-L4. В частности, после вынуждения модуля 33a формирования форм разностных сигналов подсчитывать число разностных пикселов DP, модуль 37 обнаружения линий на земной поверхности находит точки CP пересечения между линиями L1-L4 и линией La вдоль направления, в котором сплошной объект попадает в поле зрения в данных разностных изображений DWt и вынуждает модуль 33a формирования форм разностных сигналов формировать форму DWt разностного сигнала для каждой из линий L1-L4 посредством корреляции точек CP пересечения и подсчитанного числа. Модуль 37 обнаружения линий на земной поверхности за счет этого может получать множество форм разностных сигналов, как показано на фиг. 21(b). На фиг. 21(b), форма DWt1 разностного сигнала основана на практически параллельной линии L1, форма DWt2 разностного сигнала основана на практически параллельной линии L2, форма DWt3 разностного сигнала основана на практически параллельной линии L3, и форма DWt4 разностного сигнала основана на практически параллельной линии L4.
[0083] Ссылаясь на множество форм DWt1-DWt4 разностных сигналов, форма DWt3 разностного сигнала на основе практически параллельной линии L3 около транспортного средства V демонстрирует большую тенденцию к увеличению частоты, чем формы DWt1, DWt2 разностных сигналов на основе практически параллельных линий L1, L2 дальше от транспортного средства V. Это обусловлено тем, что другое транспортное средство V является сплошным объектом, и в силу этого другое транспортное средство V безусловно растягивается до бесконечности в разностном изображении PD. Тем не менее, форма DWt3 разностного сигнала и форма DWt4 разностного сигнала имеют идентичную частоту. Это обусловлено тем, что практически параллельные линии L3, L4 перекрывают другое транспортное средство V в разностном изображении PDt. В частности, это обусловлено тем, что отсутствуют разностные пикселы DP между практически параллельной линией L3 и линией L4.
[0084] Модуль 37 обнаружения линий на земной поверхности оценивает линию Lt на земной поверхности другого транспортного средства V из изменений в профилях множества форм DWt1-DWt4 разностных сигналов, описанных выше. В случае примера, показанного на фиг. 21(b), модуль 37 обнаружения линий на земной поверхности оценивает практически параллельную линию L3 как линию Lt на земной поверхности. В частности, линия Lt на земной поверхности оценивается из темпов увеличения области, показанной на фиг. 22. Фиг. 22 является графиком, показывающим темпы увеличения областей множества форм DWt1-DWt4 разностных сигналов, показанных на фиг. 21(b). Модуль 37 обнаружения линий на земной поверхности обращается к темпам увеличения области от самой дальней практически параллельной линии из вычисленных областей до самой ближней практически параллельной линии, как показано на фиг. 22. Область формы DWt2 разностного сигнала демонстрирует темп увеличения, который является постоянным относительно области формы DWt1 разностного сигнала, и область формы DWt3 разностного сигнала демонстрирует темп увеличения, который является постоянным относительно области формы DWt2 разностного сигнала. Область формы DWt4 разностного сигнала и область формы DWt3 разностного сигнала равны, и темп увеличения составляет предварительно определенное значение или меньше. Это обусловлено тем, что отсутствуют разностные пикселы DP между практически параллельной линией L3 и линией L4, как описано выше. В частности, может быть оценено, что отсутствует сплошной объект (например, шины смежного транспортного средства) между практически параллельной линией L3 и линией L4. Следовательно, модуль 37 обнаружения линий на земной поверхности обнаруживает практически параллельную линию L3 в качестве линии Lt на земной поверхности другого транспортного средства V.
[0085] Возвращаясь к фиг. 20, модуль 33b задания областей согласно четвертому варианту осуществления увеличивает размеры областей A1, A2 обнаружения на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией, аналогично первому варианту осуществления. Кроме того, в четвертом варианте осуществления, модуль 33b задания областей изменяет величину Δy0fs увеличения при увеличении областей A1, A2 обнаружения наружу в направлении ширины транспортного средства на основе линии Lt на земной поверхности другого транспортного средства V, обнаруженного посредством модуля 37 обнаружения линий на земной поверхности. В частности, чем меньше расстояние по ширине транспортного средства от боковой поверхности транспортного средства V1 до линии Lt на земной поверхности другого транспортного средства V, тем больше модуль 33b задания областей уменьшает величину Δy0fs увеличения при увеличении размеров областей A1, A2 обнаружения, как показано на фиг. 23.
[0086] Таким образом, согласно устройству 4 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно четвертому варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0087] Согласно четвертому варианту осуществления, обнаруживается линия Lt на земной поверхности другого транспортного средства V, движущегося в смежной полосе движения, и чем меньше расстояние от боковой поверхности транспортного средства V до линии Lt на земной поверхности, тем больше величина Δy0fs изменения уменьшается, когда размеры областей A1, A2 обнаружения увеличиваются. Например, в таких случаях, когда другое транспортное средство V может быть надлежащим образом обнаружено в смежной полосе движения, даже когда расстояние в направлении ширины транспортного средства от боковой поверхности транспортного средства V до смежного транспортного средства является небольшим, и минимизируется величина увеличения, на которую увеличиваются размеры областей A1, A2 обнаружения, за счет этого в четвертом варианте осуществления можно минимизировать величину Δy0fs изменения, когда размеры областей A1, A2 обнаружения увеличиваются, и в силу этого эффективно не допускать задания областей A1, A2 обнаружения в последующих полосах движения или за пределами дороги и не допускать ошибочного обнаружения других транспортных средств, движущихся в последующих полосах движения, по покрытию за пределами дороги и т.п., в качестве смежных транспортных средств.
[0088] Пятый вариант осуществления
Далее описывается пятый вариант осуществления настоящего изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно пятому варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0089] Фиг. 24 является блок-схемой, показывающей подробности компьютера 30 согласно пятому варианту осуществления. На фиг. 24, камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0090] Компьютер 30 согласно пятому варианту осуществления содержит модуль 38 определения состояния поворота (средство определения состояния поворота), как показано на фиг. 24. Модуль 38 определения состояния поворота определяет то, находится или нет транспортное средство V в состоянии поворота, на основе скорости транспортного средства, обнаруженной посредством датчика 20 скорости транспортного средства, или величины руления, обнаруженной посредством датчика угла поворота при рулении (не показан), а также обнаруживает радиус поворота транспортного средства V, когда транспортное средство V находится в состоянии поворота. Способ, посредством которого состояние поворота обнаруживается посредством модуля 38 определения состояния поворота, не ограничен конкретным образом; состояние поворота транспортного средства V1 может быть обнаружено на основе результатов определения датчика поперечного ускорения, например, или состояние поворота транспортного средства V1 может быть обнаружено посредством прогнозирования формы дороги на основе изображения, захваченного посредством камеры 10. Состояние поворота транспортного средства V1 также может быть обнаружено посредством указания дороги, на которой движется транспортное средство V, в соответствии с картографической информацией или информацией текущей позиции транспортного средства V согласно навигационной системе и т.п.
[0091] Модуль 33b задания областей согласно пятому варианту осуществления увеличивает области A1, A2 обнаружения на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией, аналогично первому варианту осуществления, и в пятом варианте осуществления модуль 33b задания областей также изменяет величину Δy0fs увеличения, когда размеры областей A1, A2 обнаружения увеличиваются в соответствии с радиусом поворота транспортного средства V, когда транспортное средство V определяется посредством модуля 38 определения состояния поворота как находящееся в состоянии поворота. В частности, чем меньше радиус поворота транспортного средства V, тем меньшей модуль 33b задания областей задает величину Δy0fs увеличения областей A1, A2 обнаружения.
[0092] Фиг. 25 является видом сверху, показывающим состояние движения транспортного средства, когда транспортное средство поворачивает, и также показывающим пример случая, в котором модуль 33b задания областей увеличивает область A1 обнаружения. В этом окружении, в котором транспортное средство V поворачивает на повороте и т.п., как показано на фиг. 25, чем меньше радиус поворота транспортного средства V, тем проще области A1, A2 обнаружения на внешних сторонах направления поворота задаются в последующих полосах движения, и когда область A1 обнаружения увеличивается наружу в направлении ширины транспортного средства идентично первому варианту осуществления, возникают случаи, в которых другое транспортное средство V в последующей полосе движения входит в область A1 обнаружения, и это другое транспортное средство V ошибочно обнаруживается в качестве смежного транспортного средства.
[0093] С учетом этого, когда транспортное средство V определяется посредством модуля 38 определения состояния поворота как поворачивающее, чем меньше радиус поворота транспортного средства V, тем меньше модуль 33b задания областей задает величину Δy0fs увеличения областей A1, A2 обнаружения относительно расстояния Δy по ширине транспортного средства, как показано на фиг. 26. За счет этого можно не позволять задание областей A1, A2 обнаружения в последующих полосах движения, даже когда транспортное средство V поворачивает на повороте, и как результат, можно эффективно не допускать ошибочного обнаружения других транспортных средств V в последующих полосах движения в качестве смежных транспортных средств.
[0094] В дополнение к конфигурации, описанной выше, модуль 33b задания областей в пятом варианте осуществления также может использовать конфигурацию для уменьшения величины Δy0fs увеличения областей A1, A2 обнаружения на основе ширины полосы движения полосы движения, по которой движется транспортное средство V, как раскрыто во втором варианте осуществления. В этом случае, модуль 33b задания областей может сравнивать величину Δy0fs увеличения областей A1, A2 обнаружения, определенных на основе радиуса поворота, и величину Δy0fs увеличения областей A1, A2 обнаружения, определенных на основе ширины полосы движения, выбирать меньшую величину Δy0fs увеличения и увеличивать размеры областей A1, A2 обнаружения наружу в направлении ширины транспортного средства.
[0095] Таким образом, согласно устройству 5 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно пятому варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0096] В пятом варианте осуществления, когда транспортное средство V определяется посредством модуля 38 определения состояния поворота как поворачивающее, чем меньше радиус поворота транспортного средства V, тем меньше величина Δy0fs увеличения областей A1, A2 обнаружения относительно расстояния Δy по ширине транспортного средства, как показано на фиг. 26, за счет чего можно не позволять задание областей A1, A2 обнаружения в последующих полосах движения, даже когда транспортное средство V поворачивает на повороте, как показано на фиг. 25, и как результат, можно эффективно не допускать ошибочного обнаружения других транспортных средств V в последующих полосах движения в качестве смежных транспортных средств.
[0097] Кроме того, согласно пятому варианту осуществления, когда транспортное средство V сменяет полосу движения, величина Δy0fs увеличения областей A1, A2 обнаружения может подавляться на основе состояния поворота транспортного средства V. Например, когда транспортное средство V1 движется на прямой дороге, и когда транспортное средство V обнаруживается как поворачивающее, может быть оценено, что чем меньше радиус поворота, тем выше вероятность того, что транспортное средство V выполняет смену полосы движения. С учетом этого, посредством оценки того, что чем меньше радиус поворота транспортного средства V, тем выше вероятность того, что транспортное средство V выполняет смену полосы движения, и посредством уменьшения величины Δy0fs увеличения областей A1, A2 обнаружения, можно эффективно не допускать задания областей A1, A2 обнаружения в последующих полосах движения во время смены полосы движения и не допускать ошибочного обнаружения других транспортных средств, движущихся в последующих полосах движения, в качестве смежных транспортных средств.
[0098] Шестой вариант осуществления
Далее описывается шестой вариант осуществления настоящего изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно шестому варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0099] Фиг. 27 является видом сверху, показывающим состояние движения транспортного средства в шестом варианте осуществления, и также показывающим пример случая, в котором модуль 33b задания областей увеличивает область A1 обнаружения. В шестом варианте осуществления модуль 33b задания областей смещает области A1, A2 обнаружения наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией и увеличивает области A1, A2 обнаружения наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией. Подробности описываются ниже.
[0100] Фиг. 28(A) является графиком, показывающим взаимосвязь между расстоянием Δy по ширине транспортного средства до разделительной линии и величиной перемещения (величиной y0fs1 смещения), когда области A1, A2 обнаружения смещаются наружу в направлении ширины транспортного средства, и фиг. 28(B) является графиком, показывающим взаимосвязь между расстоянием Δy по ширине транспортного средства до разделительной линии и величиной увеличения (величиной Δy0fs2 увеличения), когда области A1, A2 обнаружения увеличиваются наружу в направлении ширины транспортного средства.
[0101] В частности, когда расстояние Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией меньше y3, как показано на фиг. 28(A), модуль 33b задания областей оставляет области A1, A2 обнаружения неизмененными, и когда расстояние Δy по ширине транспортного средства составляет y3 или более и меньше y4, модуль 33b задания областей смещает области A1, A2 обнаружения наружу в направлении ширины транспортного средства согласно расстоянию Δy по ширине транспортного средства. Когда расстояние Δy по ширине транспортного средства между боковой поверхностью транспортного средства V1 и разделительной линией составляет y3 или более и меньше y4, области A1, A2 обнаружения не увеличиваются наружу в направлении ширины транспортного средства.
[0102] Когда расстояние Δy по ширине транспортного средства составляет y4 или более, модуль 33b задания областей смещает области A1, A2 обнаружения наружу в направлении ширины транспортного средства на предварительно определенную величину y0fs1' смещения и увеличивает области A1, A2 обнаружения наружу в направлении ширины транспортного средства, как показано на фиг. 28(A). В частности, когда расстояние Δy по ширине транспортного средства составляет y4 или более и меньше y5, области A1, A2 обнаружения увеличиваются наружу в направлении ширины транспортного средства согласно расстоянию Δy по ширине транспортного средства, как показано на фиг. 28(B), и когда расстояние Δy по ширине транспортного средства составляет y5 или более, области A1, A2 обнаружения увеличиваются наружу в направлении ширины транспортного средства на предварительно определенную величину Δy0fs2' увеличения.
[0103] В окружении, в котором транспортное средство V отделено от разделительной линии, например, модуль 33b задания областей за счет этого смещает области A1, A2 обнаружения наружу в направлении ширины транспортного средства в соответствии с расстоянием Δy по ширине транспортного средства, когда расстояние Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией составляет y3 или более, и когда расстояние Δy по ширине транспортного средства после того составляет y4 или более, модуль 33b задания областей прекращает смещение областей A1, A2 обнаружения наружу в направлении ширины транспортного средства и вместо этого увеличивает области A1, A2 обнаружения наружу в направлении ширины транспортного средства. Модуль 33b задания областей затем увеличивает области A1, A2 обнаружения наружу в направлении ширины транспортного средства в соответствии с расстоянием Δy по ширине транспортного средства до тех пор, пока расстояние Δy по ширине транспортного средства не достигнет y5, и в момент времени, когда расстояние Δy по ширине транспортного средства достигает y5, модуль 33b задания областей также прекращает увеличение областей A1, A2 обнаружения наружу в направлении ширины транспортного средства.
[0104] В этом окружении, в котором транспортное средство V приближается к разделительной линии, когда расстояние Δy по ширине транспортного средства меньше y5, модуль 33b задания областей сужает размеры увеличенных областей A1, A2 обнаружения внутрь в направлении ширины транспортного средства. Когда расстояние Δy по ширине транспортного средства после этого меньше y4, модуль 33b задания областей прекращает сужение областей A1, A2 обнаружения внутрь в направлении ширины транспортного средства и вместо этого смещает области A1, A2 обнаружения внутрь в направлении ширины транспортного средства в соответствии с расстоянием Δy по ширине транспортного средства. Когда расстояние Δy по ширине транспортного средства меньше y3, модуль 33b задания областей затем также прекращает смещение областей A1, A2 обнаружения внутрь в направлении ширины транспортного средства.
[0105] Кроме того, в шестом варианте осуществления, модуль 33b задания областей имеет предельные значения (предписанные значения увеличения, предписанные значения) для величин изменения согласно различным состояниям, когда транспортное средство V сменяет полосу движения, когда сплошной объект считывается, и в обычные моменты времени (когда транспортное средство V движется по прямой, и когда сплошной объект не обнаруживается), как для величины y0fs1 смещения, так и для величины Δy0fs2 увеличения областей A1, A2 обнаружения. Модуль 33b задания областей затем постепенно смещает области A1, A2 обнаружения наружу в направлении ширины транспортного средства в пределах диапазона, который не превышает предельные значения Δy0fs1 и Δy0fs2 согласно различным состояниям, и постепенно увеличивает размеры областей A1, A2 обнаружения наружу в направлении ширины транспортного средства. Предельные значения для каждого состояния, описанного выше, применяются независимо от состояния поворота транспортного средства или ширины полосы движения для данной полосы движения.
[0106] Таким образом, согласно устройству 6 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно шестому варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0107] Согласно шестому варианту осуществления, области A1, A2 обнаружения смещаются наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией, и когда расстояние Δy по ширине транспортного средства после того достигает предварительно определенного значения или более, и величина смещения областей A1, A2 обнаружения достигает предварительно определенной величины, следующие преимущества могут достигаться посредством увеличения областей A1, A2 обнаружения наружу в направлении ширины транспортного средства вместо смещения областей A1, A2 обнаружения.
[0108] В частности, когда сплошной объект (другое транспортное средство и т.п.), движущийся в смежной полосе движения, обнаруживается в области A1 или A2 обнаружения, чем дальше наружу в направлении ширины транспортного средства размещается область A1 или A2 обнаружения, тем чаще скорость перемещения сплошного объекта вычисляется как превышающая фактическую скорость перемещения, а чем дальше внутрь в направлении ширины транспортного средства размещается область A1 или A2 обнаружения, тем чаще скорость перемещения сплошного объекта вычисляется как меньшая фактической скорости перемещения. Следовательно, когда области A1, A2 обнаружения увеличиваются слишком далеко наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства, возникают случаи, в которых имеется неоднородность в скорости перемещения обнаруженного сплошного объекта, и точность обнаружения сплошного объекта снижается, в зависимости от определенной позиции сплошного объекта в области A1 или A2 обнаружения. В настоящем варианте осуществления, когда транспортное средство V отделено от разделительной линии, такая неоднородность в результатах обнаружения скорости перемещения сплошного объекта может быть минимизирована, и сплошной объект (смежное транспортное средство) может быть надлежащим образом обнаружен посредством смещения областей A1, A2 обнаружения наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией.
[0109] Когда области A1, A2 обнаружения смещаются слишком далеко наружу в направлении ширины транспортного средства, возникают случаи, в которых двухколесное транспортное средство и т.п., движущееся в позиции около транспортного средства V1 в направлении ширины транспортного средства, не входит в область A1 или A2 обнаружения, и это двухколесное транспортное средство не может быть обнаружено. Тем не менее, в настоящем варианте осуществления, когда величина смещения, на которую области A1, A2 обнаружения смещаются наружу в направлении ширины транспортного средства, составляет предварительно определенную величину или более, такие проблемы могут эффективно разрешаться посредством увеличения областей A1, A2 обнаружения наружу в направлении ширины транспортного средства вместо смещения областей A1, A2 обнаружения.
[0110] Седьмой вариант осуществления
Далее описывается седьмой вариант осуществления настоящего изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно седьмому варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0111] Фиг. 29 является блок-схемой, показывающей подробности компьютера 30 согласно седьмому варианту осуществления. На фиг. 29, камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0122] Компьютер 30 согласно седьмому варианту осуществления содержит модуль 39 обнаружения посторонних веществ (средство обнаружения посторонних веществ), как показано на фиг. 29. На основе изображения, захваченного посредством камеры 10, модуль 39 обнаружения посторонних веществ обнаруживает посторонние вещества, такие как дождевая вода или пятна от воды, прилипающие к линзе. Например, модуль 39 обнаружения посторонних веществ обнаруживает количество дождевой воды, прилипающей к линзе, посредством обнаружения интенсивности работы стеклоочистителя или датчика дождевой воды, который обнаруживает количество дождевой воды, прилипающей к линзе, посредством излучения инфракрасного света на линзу и обнаружения величины, на которую излученный инфракрасный свет ослабляется посредством дождевой воды; и модуль 39 обнаружения посторонних веществ выводит обнаруженное количество дождевой воды в модуль 33b задания областей.
[0113] Модуль 39 обнаружения посторонних веществ не ограничивается обнаружением дождевой воды и, например, также может обнаруживать пятна от воды или грязь, прилипающую к линзе. Например, посредством извлечения края сфотографированного субъекта из захваченного изображения и оценки резкости изображения из характеристик извлеченного края, модуль 39 обнаружения посторонних веществ может оценивать величину, в которой пятна от воды и т.п. прилипают к линзе, и линза мутнеет (белая тонкая пленка формируется на поверхности линзы), и за счет этого может обнаруживать количество посторонних веществ, прилипающих к линзе. В противном случае, когда край аналогичной интенсивности обнаруживается в идентичной области в захваченном изображении в течение определенной длительности, модуль 39 обнаружения посторонних веществ может оценивать то, что посторонние вещества прилипают к этой области, и обнаруживать количество посторонних веществ, прилипающих к линзе.
[0114] Модуль 33b задания областей согласно седьмому варианту осуществления увеличивает области A1, A2 обнаружения наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V, и разделительной линией, аналогично первому варианту осуществления, и в седьмом варианте осуществления также варьирует величина Δy0fs увеличения при увеличении областей A1, A2 обнаружения на основе количества посторонних веществ, обнаруженных посредством модуля 39 обнаружения посторонних веществ. В частности, чем больше количество посторонних веществ, прилипающих к линзе, тем меньшей модуль 33b задания областей задает величину Δy0fs увеличения при увеличении областей A1, A2 обнаружения.
[0115] Фиг. 30 является графиком, показывающим взаимосвязь между количеством посторонних веществ, прилипающих к линзе, и размерами областей A1, A2 обнаружения (величиной Δy0fs увеличения). Чем больше количество посторонних веществ, прилипающих к линзе, тем меньшей модуль 33b задания областей задает величину Δy0fs увеличения при увеличении областей A1, A2 обнаружения, как показано на фиг. 30. В частности, когда количество посторонних веществ, прилипающих к линзе, меньше q1, модуль 33b задания областей сохраняет величина Δy0fs увеличения областей A1, A2 обнаружения равной начальной величины увеличения определенной на основе расстояния Δy по ширине транспортного средства. Когда количество посторонних веществ, прилипающих к линзе, составляет q1 или более и меньше q2, чем больше количество посторонних веществ, прилипающих к линзе, тем меньшей модуль 33b задания областей задает величину Δy0fs увеличения областей A1, A2 обнаружения. Когда количество посторонних веществ, прилипающих к линзе, превышает q2, модуль 33b задания областей задает величину увеличения областей A1, A2 обнаружения равной наименьшему предварительно определенному значению Δy0fs''.
[0116] Таким образом, согласно устройству 7 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно седьмому варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0117] Согласно седьмому варианту осуществления, обнаруживается количество посторонних веществ, прилипающих к линзе камеры 10, и чем больше количество посторонних веществ, тем меньше величина Δy0fs увеличения областей A1, A2 обнаружения. Чем больше количество посторонних веществ, прилипающих к линзе, тем больший световой поток от сфотографированного субъекта блокируется и нерегулярно отражается посредством посторонних веществ, и как результат, возникают случаи, в которых изображение разделительной линии, захваченное посредством камеры 10, является искаженным или нечетким, и точность обнаружения разделительной линии уменьшается. Следовательно, в настоящем варианте осуществления, когда большее количество посторонних веществ прилипает к линзе, величина Δy0fs увеличения областей A1, A2 обнаружения уменьшается, за счет чего можно эффективно не допускать слишком большой величины увеличения областей A1, A2 обнаружения вследствие ошибки в обнаружении расстояния по ширине транспортного средства Δy между боковой поверхностью транспортного средства V и разделительной линией и эффективно не допускать ошибочного обнаружения других транспортных средств, движущихся в последующих полосах движения, по покрытию за пределами дороги и т.п., в качестве смежных транспортных средств.
[0118] Восьмой вариант осуществления
Далее описывается восьмой вариант осуществления настоящего изобретения. Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов согласно восьмому варианту осуществления являются аналогичными устройству обнаружения сплошных объектов и способу обнаружения сплошных объектов по первому варианту осуществления, но конфигурации и детали обработки частично отличаются. Ниже описываются точки расхождения с первым вариантом осуществления.
[0119] Фиг. 31 является блок-схемой, показывающей подробности компьютера 30 согласно восьмому варианту осуществления. На фиг. 31, камера 10 и датчик 20 скорости транспортного средства также показаны для того, чтобы предоставлять понятную иллюстрацию взаимных соединений.
[0120] Компьютер 30 согласно восьмому варианту осуществления содержит модуль 40 указания типов разделительных линий (средство указания типов разделительных линий), как показано на фиг. 31. Модуль 40 указания типов разделительных линий указывает тип разделительной линии на основе изображения, захваченного посредством камеры 10. Способ для указания типа разделительной линии не ограничен конкретным образом, но модуль 40 указания типов разделительных линий, например, может указывать тип разделительной линии посредством выполнения сопоставления с шаблоном для разделительной линии, снятой посредством камеры 10. В противном случае, модуль 40 указания типов разделительных линий может указывать тип разделительной линии из картографической информации посредством указания дороги (полосы движения), на которой движется транспортное средство V, в соответствии с картографической информацией или информацией текущей позиции транспортного средства V в навигационной системе и т.п.
[0121] Модуль 33b задания областей согласно восьмому варианту осуществления увеличивает области A1, A2 обнаружения наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства между боковой поверхностью транспортного средства V и разделительной линией, аналогично первому варианту осуществления, и в восьмом варианте осуществления модуль 33b задания областей также варьирует величина Δy0fs увеличения при увеличении областей A1, A2 обнаружения на основе типа разделительной линии, указываемой посредством модуля 40 указания типов разделительных линий.
[0122] Фиг. 32 является схемой, показывающей взаимосвязь между типом разделительной линии и размером областей A1, A2 обнаружения. Чем ниже вероятность того, что указанная разделительная линия является разделительной линией, которая разделяет полосу движения, по которой движется транспортное средство V, и смежную полосу движения, тем меньшей модуль 33b задания областей задает величину Δy0fs увеличения областей A1, A2 обнаружения. В примере, показанном на фиг. 32, например, модуль 33b задания областей допускает указание четырех типов разделительных линий: белая прерывистая линия, белая сплошная линия, желтая линия и составная линия. В этом случае, когда разделительная линия представляет собой белую прерывистую линию, модуль 33b задания областей оценивает из этих четырех типов разделительных линий то, что наибольшей является вероятность того, что область, смежная с полосой движения, по которой движется транспортное средство V, является смежной полосой движения, и увеличивает величину Δy0fs увеличения областей A1, A2 обнаружения на наибольшую величину из этих четырех типов разделительных линий. Когда разделительная линия представляет собой белую сплошную линию, модуль 33b задания областей оценивает то, что имеется вероятность того, что, область рядом с полосой движения, по которой движется транспортное средство V, является смежной полосой движения, и задает величину Δy0fs увеличения областей A1, A2 обнаружения таким образом, что величина Δy0fs увеличения меньше величины Δy0fs увеличения для белой прерывистой линии, но больше величины Δy0fs увеличения для других разделительных линий. Когда разделительная линия представляет собой желтую линию, модуль 33b задания областей оценивает то, что вероятность того, что область рядом с полосой движения, по которой движется транспортное средство V, является смежной полосой движения, является низкой, и уменьшает величину Δy0fs увеличения областей A1, A2 обнаружения. Когда разделительная линия представляет собой составную линию, модуль 33b задания областей оценивает то, что вероятность того, что область рядом с полосой движения, по которой движется транспортное средство V, является смежной полосой движения, является наименьшей, и уменьшает величину Δy0fs увеличения областей A1, A2 обнаружения на наибольшую величину из этих четырех типов разделительных линий.
[0123] Таким образом, согласно устройству 8 обнаружения сплошных объектов и способу обнаружения сплошных объектов согласно восьмому варианту осуществления, может повышаться точность обнаружения сплошных объектов, и (дополнительно) могут не допускаться, к примеру, такие ситуации, которые вызывают ошибки при обнаружении сплошных объектов, аналогично первому варианту осуществления. Также можно не допускать, к примеру, таких ситуаций, в которых области A1, A2 обнаружения чрезвычайно сужаются, вызывая ошибки при обнаружении.
[0124] Согласно восьмому варианту осуществления, указывается тип разделительной линии, и различная величина Δy0fs увеличения областей A1, A2 обнаружения используется на основе указанного типа разделительной линии. Например, когда тип разделительной линии представляет собой желтую линию или составную линию, возможно то, что область рядом с полосой движения, по которой движется транспортное средство V, является обочиной, находится за пределами дороги или на встречной полосе движения, и в этом случае имеется большая вероятность того, что обнаруживается покрытие, искажения и т.п. за пределами дороги, когда увеличиваются области A1, A2 обнаружения, и точность обнаружения сплошных объектов (других транспортных средств и т.п.) снижается. В настоящем варианте осуществления, когда тип разделительной линии представляет собой желтую линию или составную линию, например, обнаружение покрытия, искажений и т.п. за пределами дороги может эффективно подавляться посредством подавления увеличения областей A1, A2 обнаружения. Когда тип разделительной линии представляет собой белую прерывистую линию или белую сплошную линию, область рядом с полосой движения, по которой движется транспортное средство V, возможно является смежной полосой движения, когда сплошной объект (другое транспортное средство V) в смежной полосе движения может быть надлежащим образом обнаружен посредством надлежащего увеличения областей A1, A2 обнаружения в соответствии с расстоянием Δy по ширине транспортного средства.
[0125] Настоящее изобретение описано выше на основе вариантов осуществления, но настоящее изобретение не ограничено вышеописанными вариантами осуществления, и изменения могут вноситься, а варианты осуществления могут комбинироваться в диапазоне, который не отклоняется от объема настоящего изобретения.
[0126] Например, в третьем варианте осуществления, описанном выше, проиллюстрирована конфигурация, в которой величина Δy0fs увеличения при увеличении размеров областей A1, A2 обнаружения уменьшена в течение определенной длительности в случаях, в которых смена полосы движения, выполняемая транспортным средством V, обнаружена посредством модуля 36 обнаружения смены полосы движения, но возможное дополнение в эту конфигурацию представляет собой дополнение, в котором вычисляется скорость перемещения транспортного средства V в направлении ширины транспортного средства, когда обнаруживается смена полосы движения, выполняемая транспортным средством V, и чем выше скорость перемещения транспортного средства V в направлении ширины транспортного средства, тем меньше величина Δy0fs увеличения при увеличении размеров областей A1, A2 обнаружения. В этом случае, чем выше скорость перемещения транспортного средства V в направлении ширины транспортного средства, тем выше вероятность смены полосы движения транспортным средством V, которая может оцениваться. Следовательно, посредством установления величины Δy0fs увеличения областей A1, A2 обнаружения тем меньшей, чем более высокой является скорость перемещения транспортного средства V в направлении ширины транспортного средства, можно эффективно не допускать слишком существенного увеличения областей A1, A2 обнаружения и задания областей A1, A2 обнаружения в последующих полосах движения вследствие смены полосы движения транспортным средством V. Способ для вычисления скорости перемещения транспортного средства V в направлении ширины транспортного средства не ограничен конкретным образом, и модуль 33b задания областей может вычислять скорость перемещения транспортного средства V в направлении ширины транспортного средства либо на основе изменения во времени расстояния Δy по ширине транспортного средства от боковой поверхности транспортного средства V до разделительной линии, обнаруженного посредством модуля 34 обнаружения поперечной позиции, либо посредством использования датчика поперечного ускорения (не показан).
[0127] В шестом варианте осуществления, описанном выше, проиллюстрирована конфигурация, в которой после того, как области A1, A2 обнаружения смещаются наружу в направлении ширины транспортного средства на основе расстояния Δy по ширине транспортного средства от боковой поверхности транспортного средства V до разделительной линии, размеры областей A1, A2 обнаружения увеличиваются наружу в направлении ширины транспортного средства, но конфигурация не ограничена этим, и другой возможный вариант, например, состоит в том, что размеры областей A1, A2 обнаружения увеличиваются наружу в направлении ширины транспортного средства, в то время как области A1, A2 обнаружения одновременно смещаются наружу в направлении ширины транспортного средства.
[0128] Кроме того, в вариантах осуществления, описанных выше, скорость транспортного средства V оценивается на основе сигнала из датчика 20 скорости транспортного средства, но оценка скорости транспортного средства не ограничена этим, и скорость транспортного средства может быть оценена из множества изображений в различные моменты времени. В этом случае, датчик скорости транспортного средства является необязательным, и конфигурация может быть упрощена. Поведение транспортного средства также может оцениваться исключительно из изображений.
[0129] Дополнительно, в вышеописанных вариантах осуществления, захваченное изображение текущего времени и изображение времени на один период раньше преобразуются в виды с высоты птичьего полета, разностное изображение PDt формируется после комбинирования преобразованных видов с высоты птичьего полета, и сформированное разностное изображение PDt оценивается вдоль направления попадания в поле зрения (направления, в котором сплошной объект попадает в поле зрения, когда захваченные изображения преобразуются в виды с высоты птичьего полета), чтобы формировать форму DWt разностного сигнала, но настоящее изобретение не ограничено этим. В другом возможном варианте, например, только изображение времени на один период раньше преобразуется в вид с высоты птичьего полета, преобразованный вид с высоты птичьего полета преобразуется в эквивалент захваченного изображения после позиционного совмещения, разностное изображение формируется из этого изображения и изображения текущего времени, и форма DWt разностного сигнала формируется посредством оценки сформированного разностного изображения вдоль направления, эквивалентного направлению попадания в поле зрения (т.е. направления, полученного посредством преобразования направления попадания в поле зрения в направление на захваченном изображении). В частности, если изображение текущего времени и изображение времени на один период раньше позиционно совмещаются, разностное изображение PDt формируется из разности двух позиционно совмещенных изображений, и разностное изображение PDt может быть оценено вдоль направления попадания в поле зрения сплошного объекта, когда изображение преобразуется в вид с высоты птичьего полета; совершенно необязательно формировать вид с высоты птичьего полета.
[0130] Устройства 1-3 обнаружения сплошных объектов согласно настоящим вариантам осуществления обнаруживают сплошной объект на основе формы DWt разностного сигнала, но не ограничено по сути, и, например, могут обнаруживать сплошной объект посредством использования оптического потока или шаблона изображения. Кроме того, обнаружение сплошного объекта ограничивается использованием формы DWt разностного сигнала, и может использоваться разностное изображение PDt. Кроме того, когда размеры областей A1, A2 обнаружения увеличиваются, размеры самих областей A1, A2 обнаружения изменяются в настоящем варианте осуществления, но настоящее изобретение не ограничено этим, и могут задаваться участки увеличения, отдельные от областей A1, A2 обнаружения.
[0131] Кроме того, модуль 32 позиционного совмещения в настоящем варианте осуществления позиционно совмещает позиции изображений вида с высоты птичьего полета в различные моменты времени в виде с высоты птичьего полета, но этот процесс "позиционного совмещения" может быть выполнен с точностью, соответствующей типу цели обнаружения или требуемой точности обнаружения. Например, строгое позиционное совмещение может быть выполнено на основе идентичного времени или идентичной позиции, или слабое позиционное совмещение может быть выполнено только в достаточной величины для того, чтобы воспринимать координаты изображений при виде с высоты птичьего полета.
Обозначения номеров ссылок
[0132] 1-3 - устройства определения проезжаемого расстояния
10 - камера (устройство захвата изображений)
20 - датчик скорости транспортного средства
30 - компьютер
31 - модуль преобразования точки обзора
32 - модуль позиционного совмещения
33 - модуль обнаружения сплошных объектов (средство обнаружения сплошных объектов)
33a - модуль формирования форм разностных сигналов
33b - модуль задания областей (средство задания областей)
34 - модуль обнаружения поперечной позиции (средство обнаружения поперечной позиции)
35 - модуль обнаружения ширины полос движения (средство обнаружения ширины)
36 - модуль обнаружения смены полосы движения (средство обнаружения смены полосы движения)
37 - модуль обнаружения линий на земной поверхности (средство обнаружения линий на земной поверхности)
38 - модуль определения состояния поворота (средство определения состояния поворота)
39 - модуль обнаружения посторонних веществ (средство обнаружения посторонних веществ)
40 - модуль указания типов разделительных линий (средство указания типов разделительных линий)
a - угол обзора
A1, A2 - области обнаружения
CP - точка пересечения
DP - разностные пикселы
DWt, DWt' - формы разностных сигналов
La, Lb - линии вдоль направления попадания в поле зрения сплошного объекта
PBt - изображение при виде с высоты птичьего полета
PD - разностное изображение
V - транспортное средство, другое транспортное средство
Δy - расстояние по ширине транспортного средства

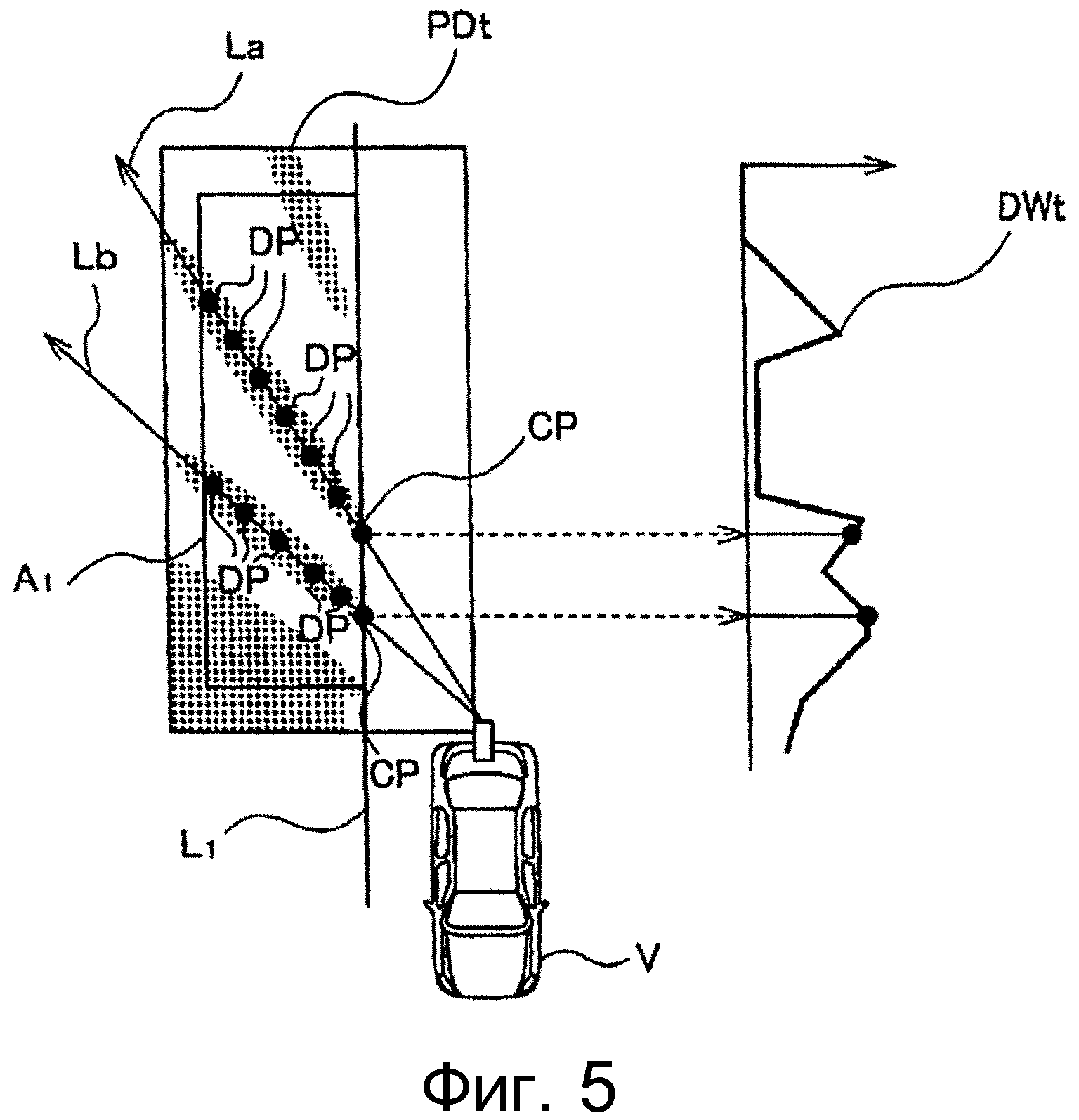
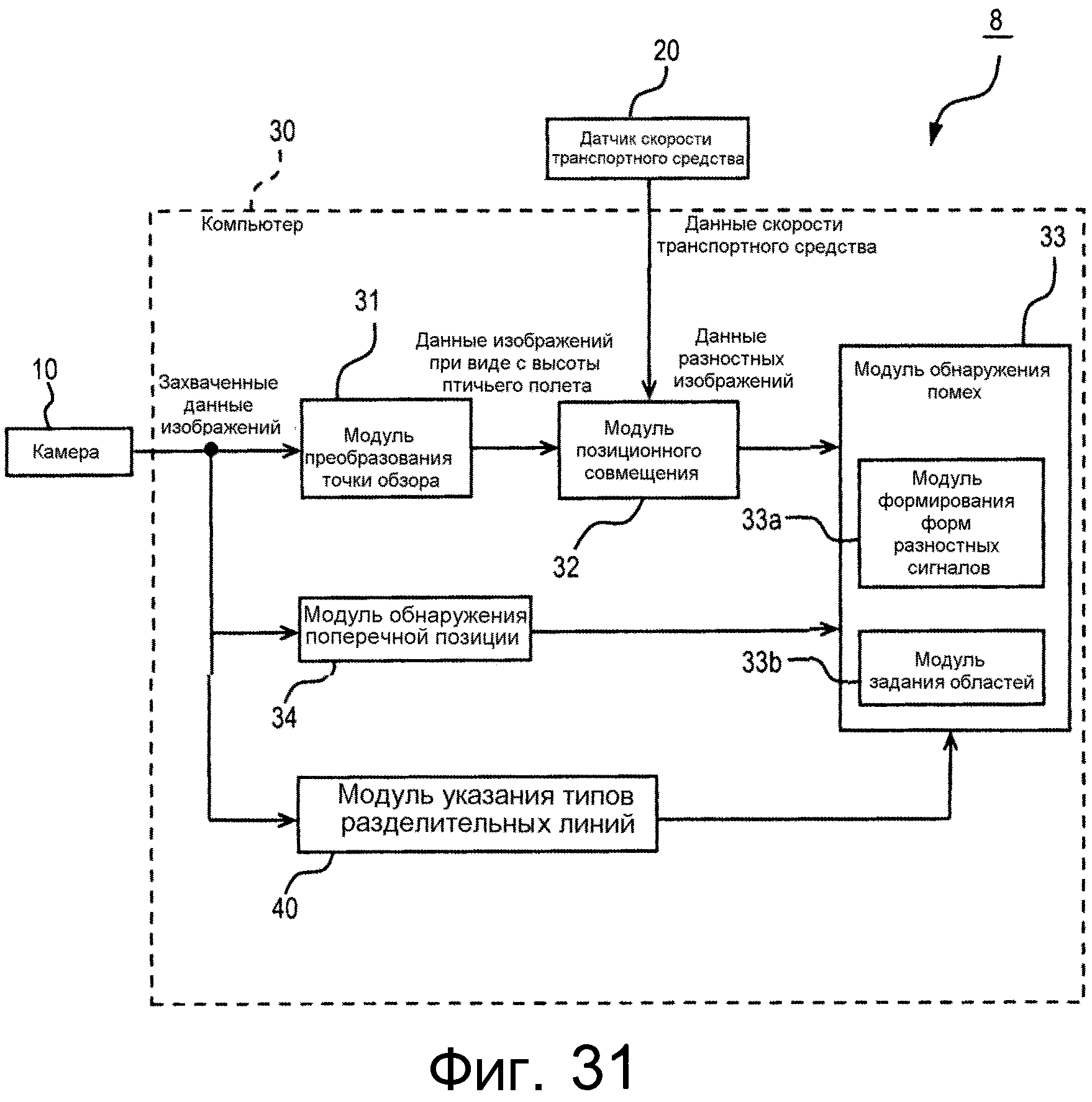
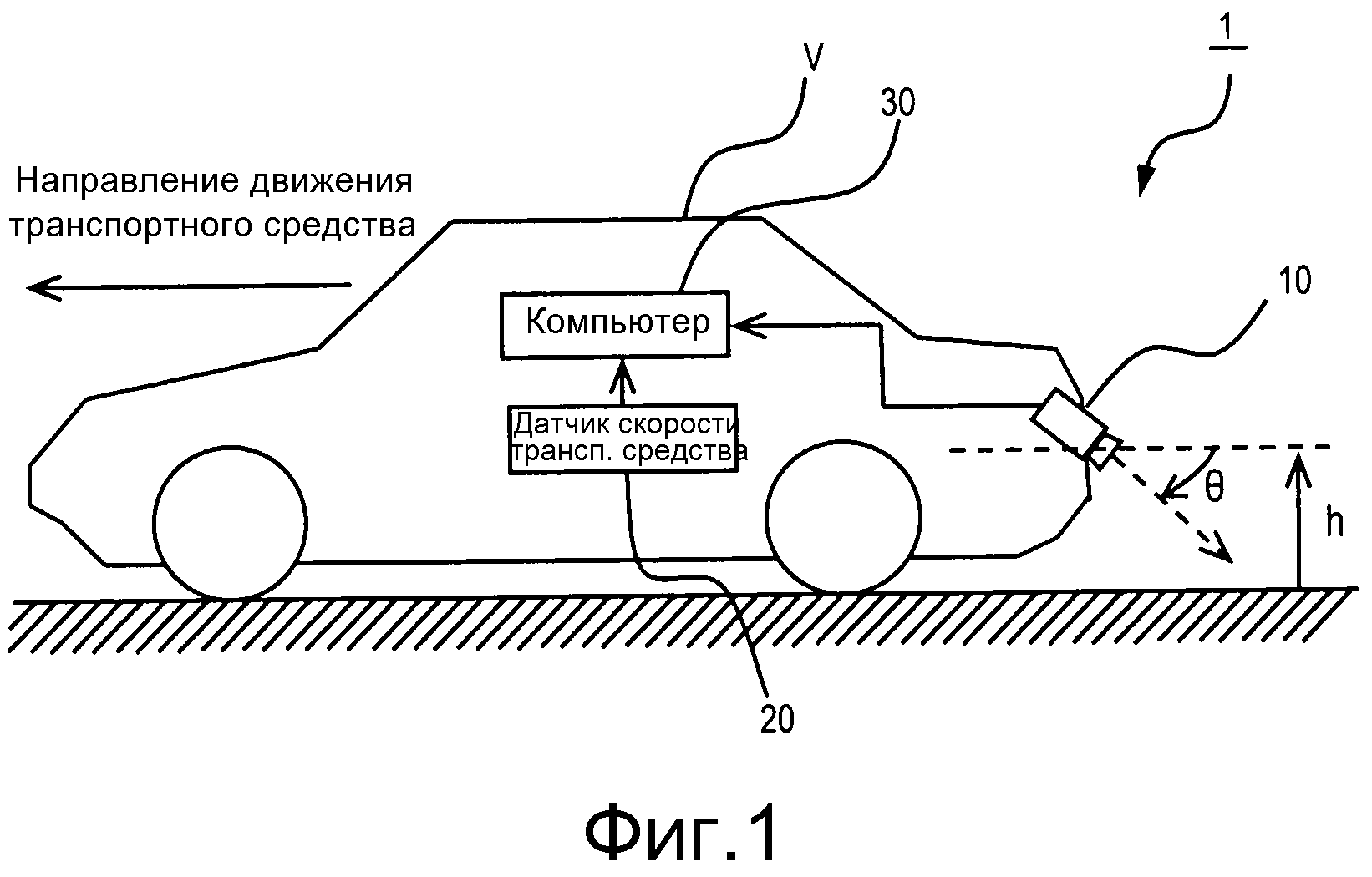
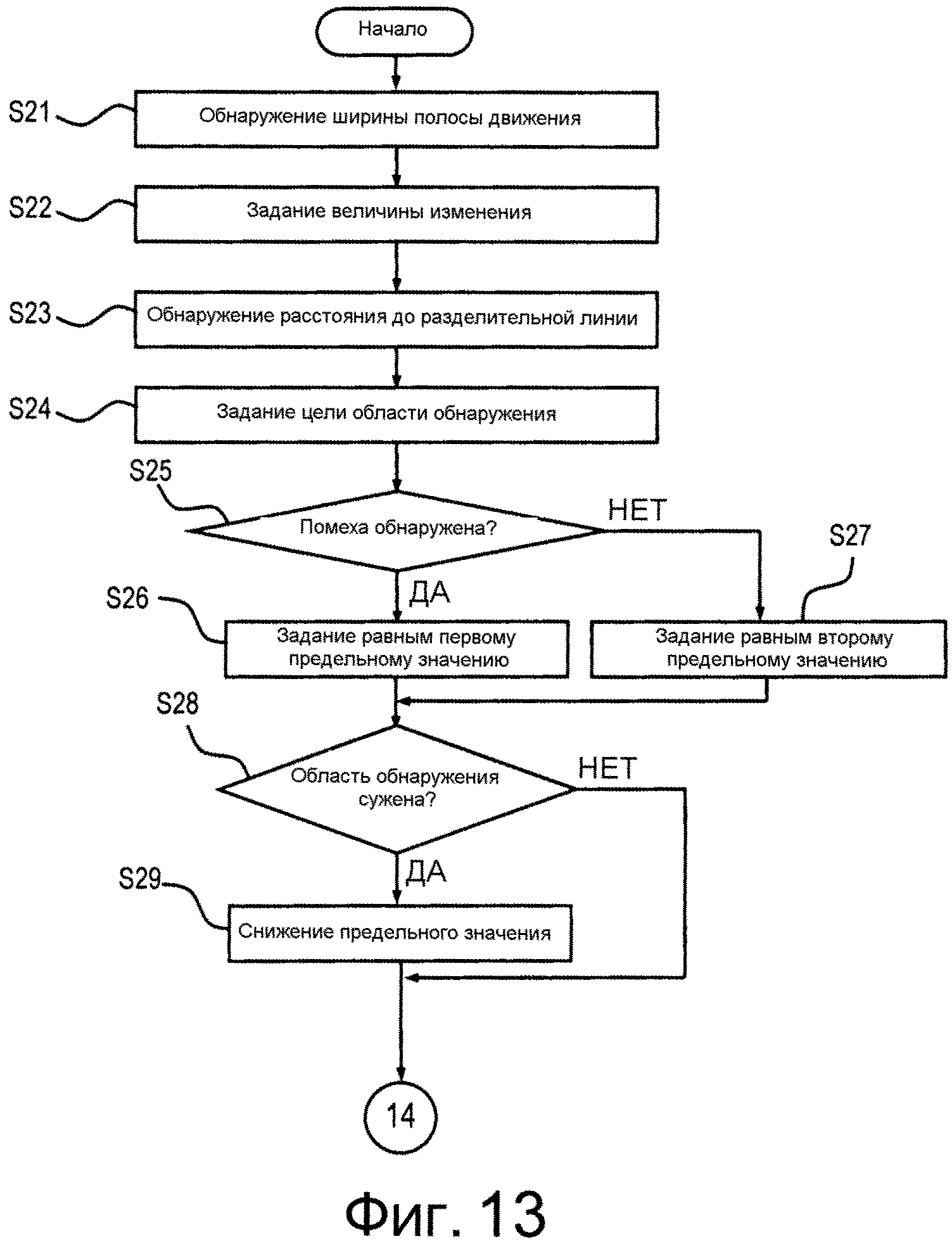
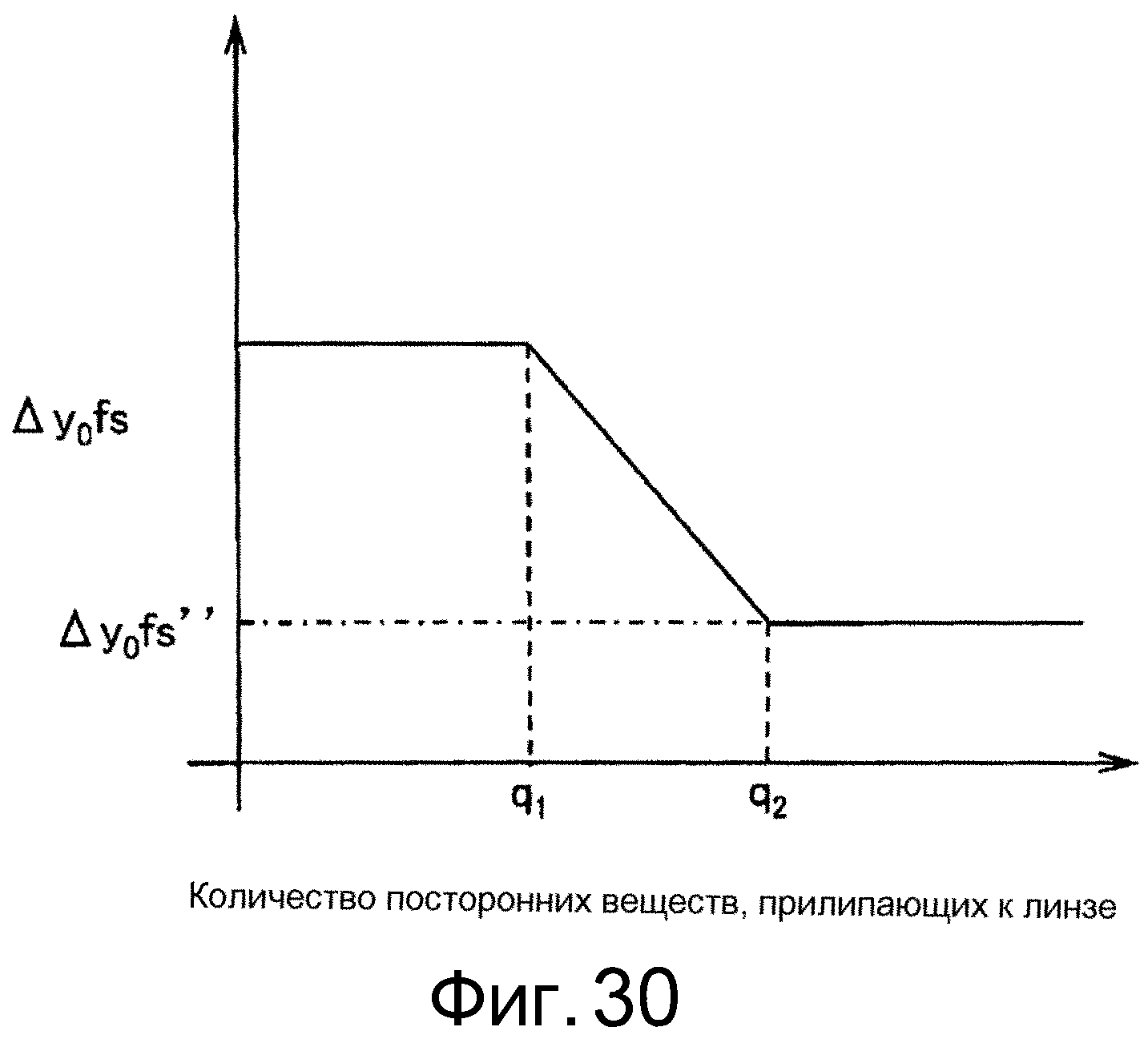
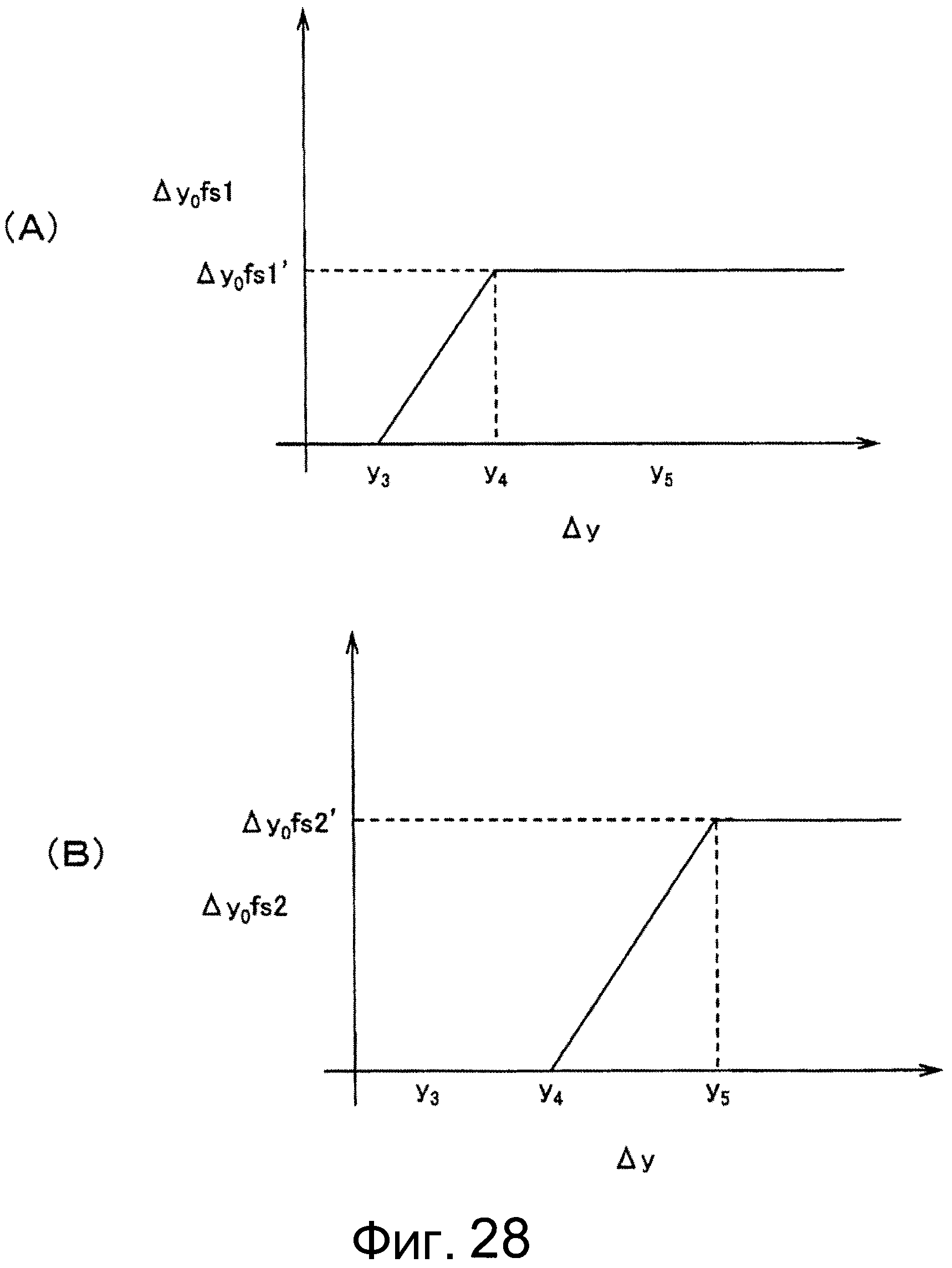
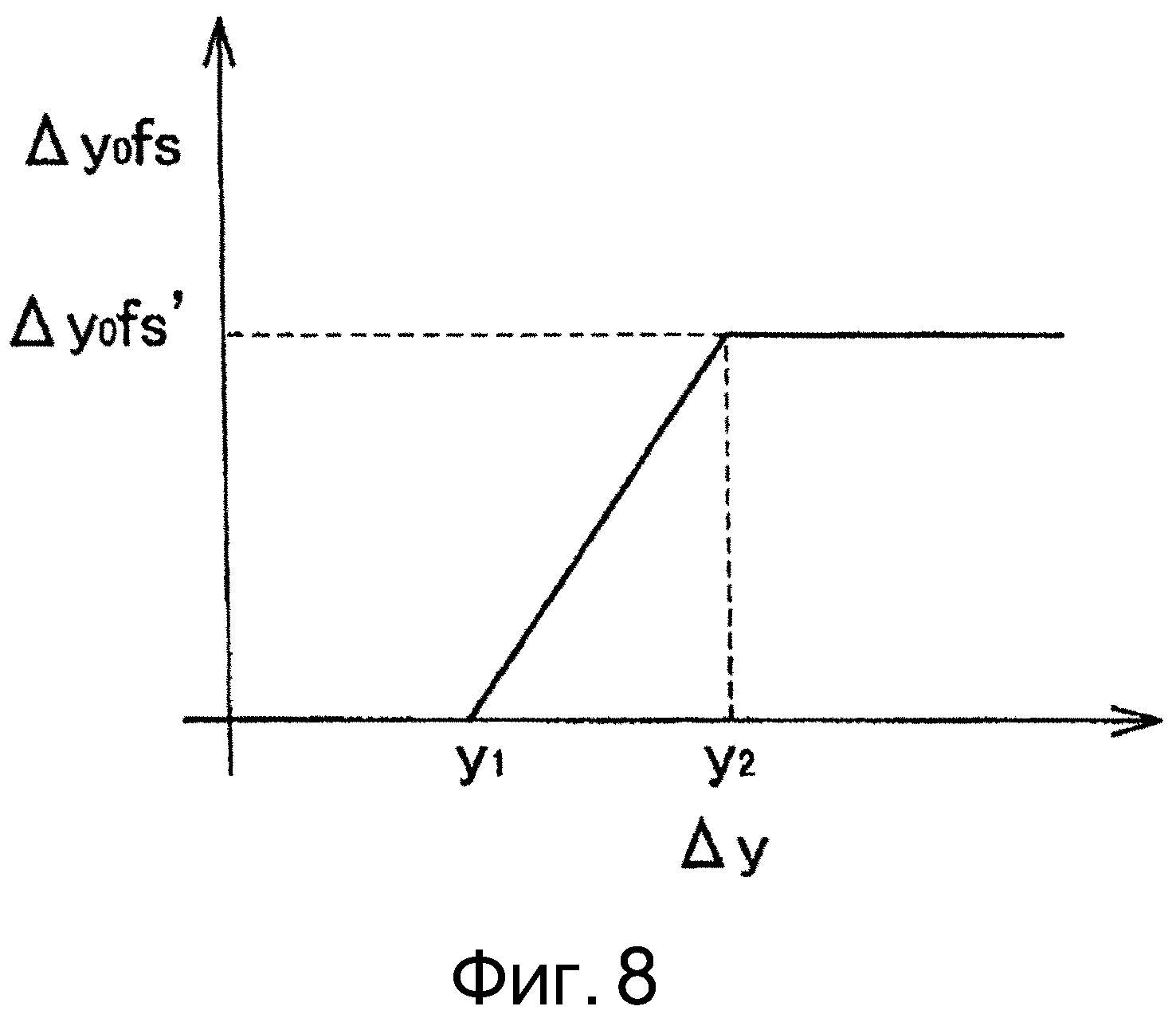
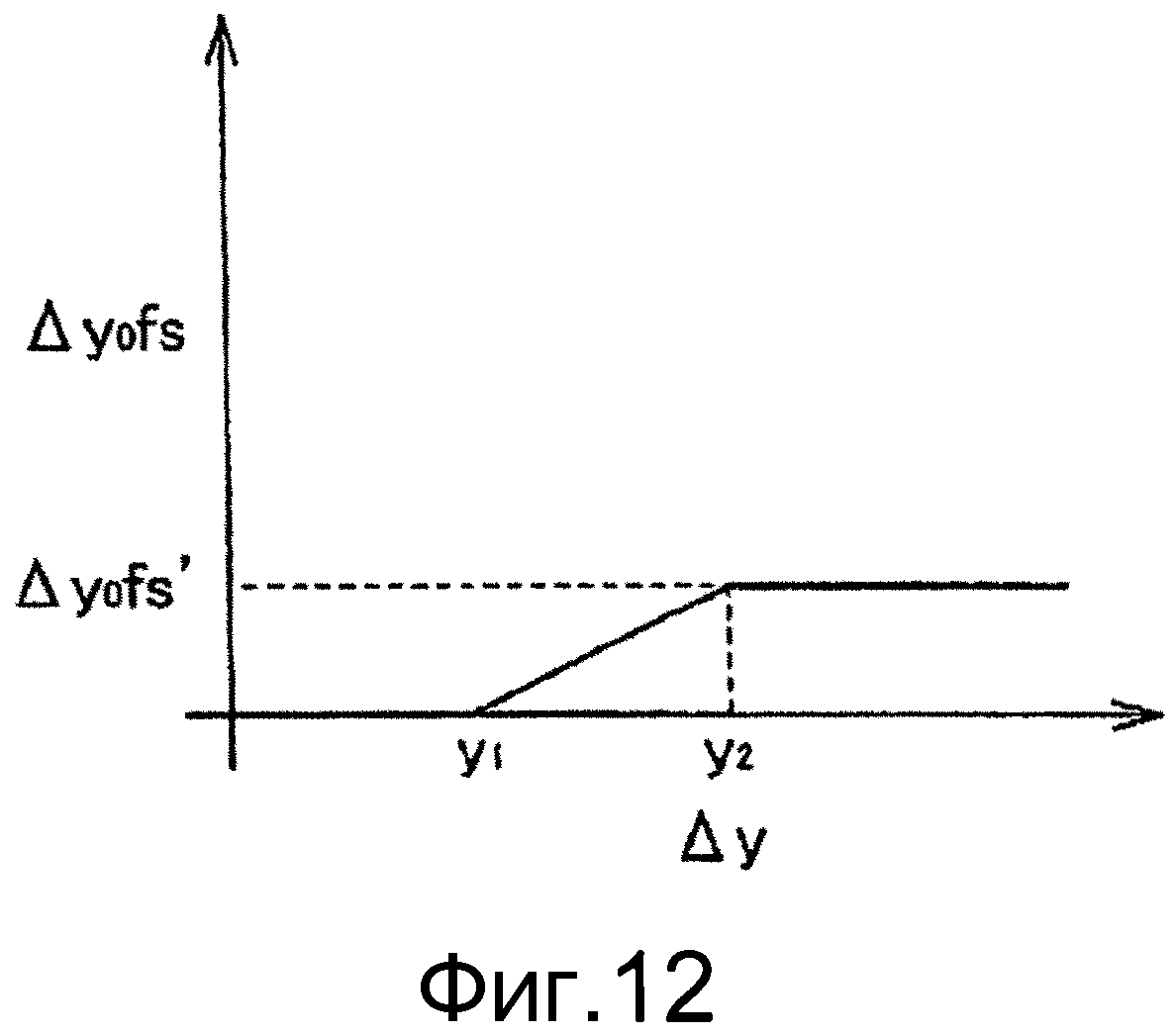
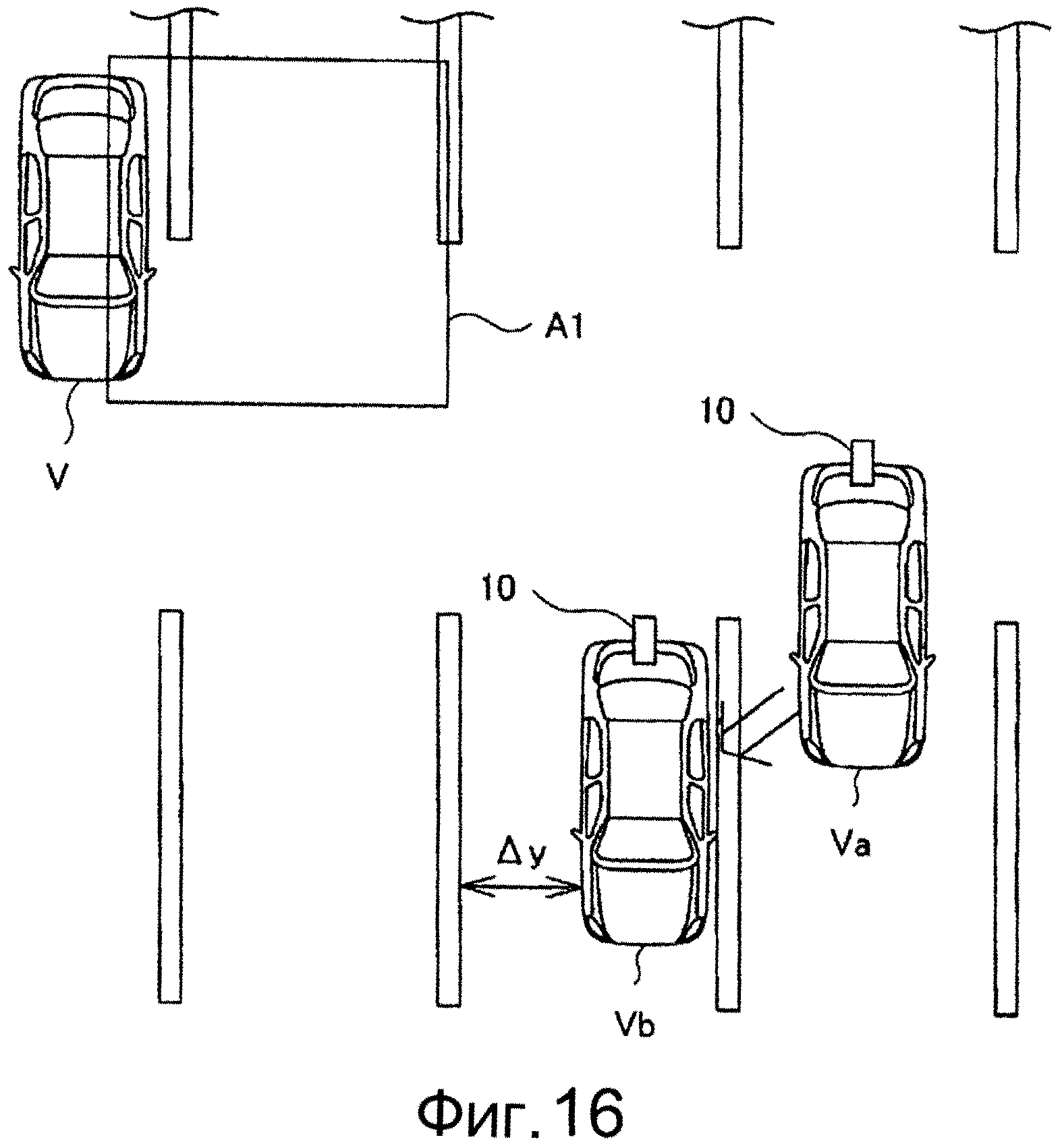
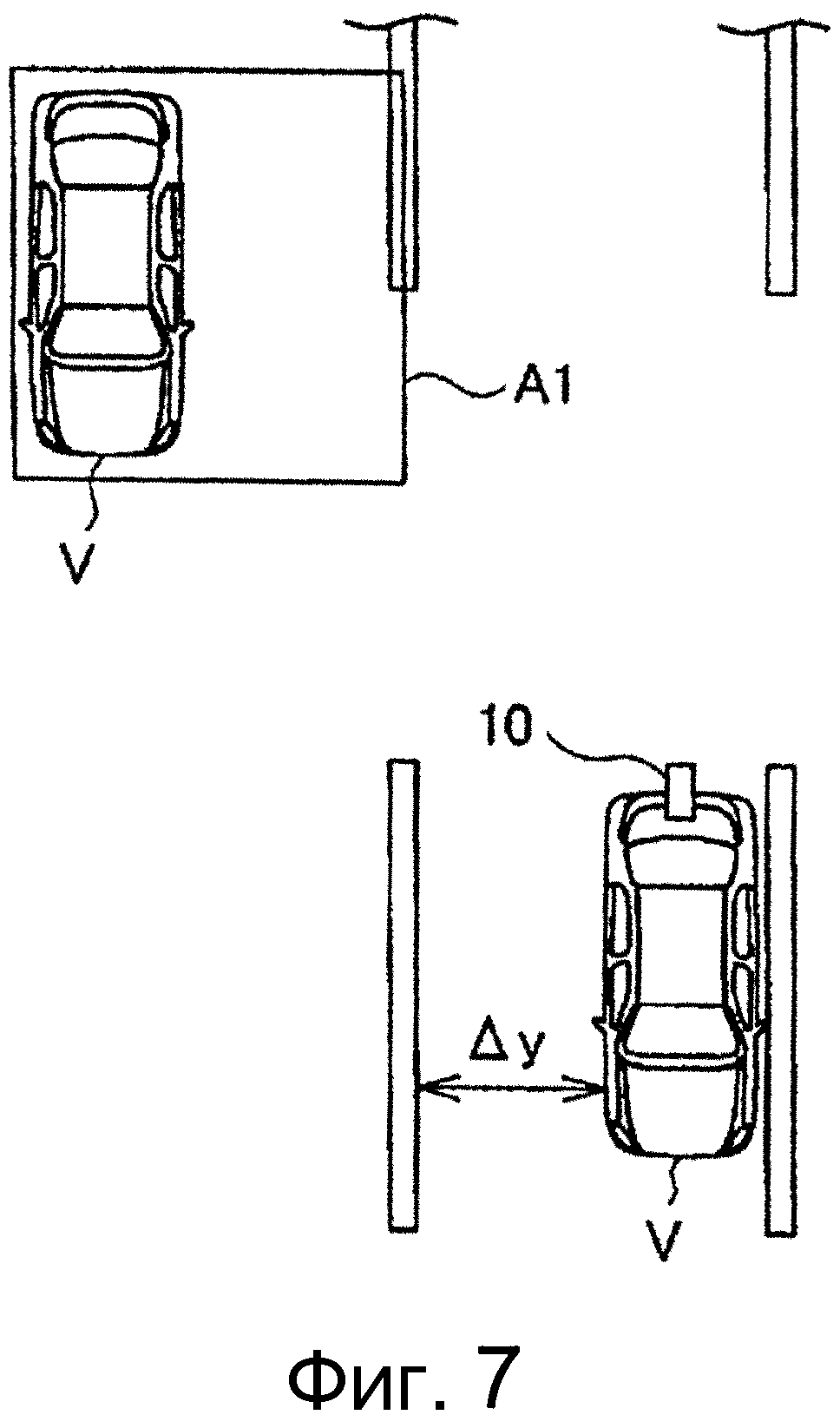
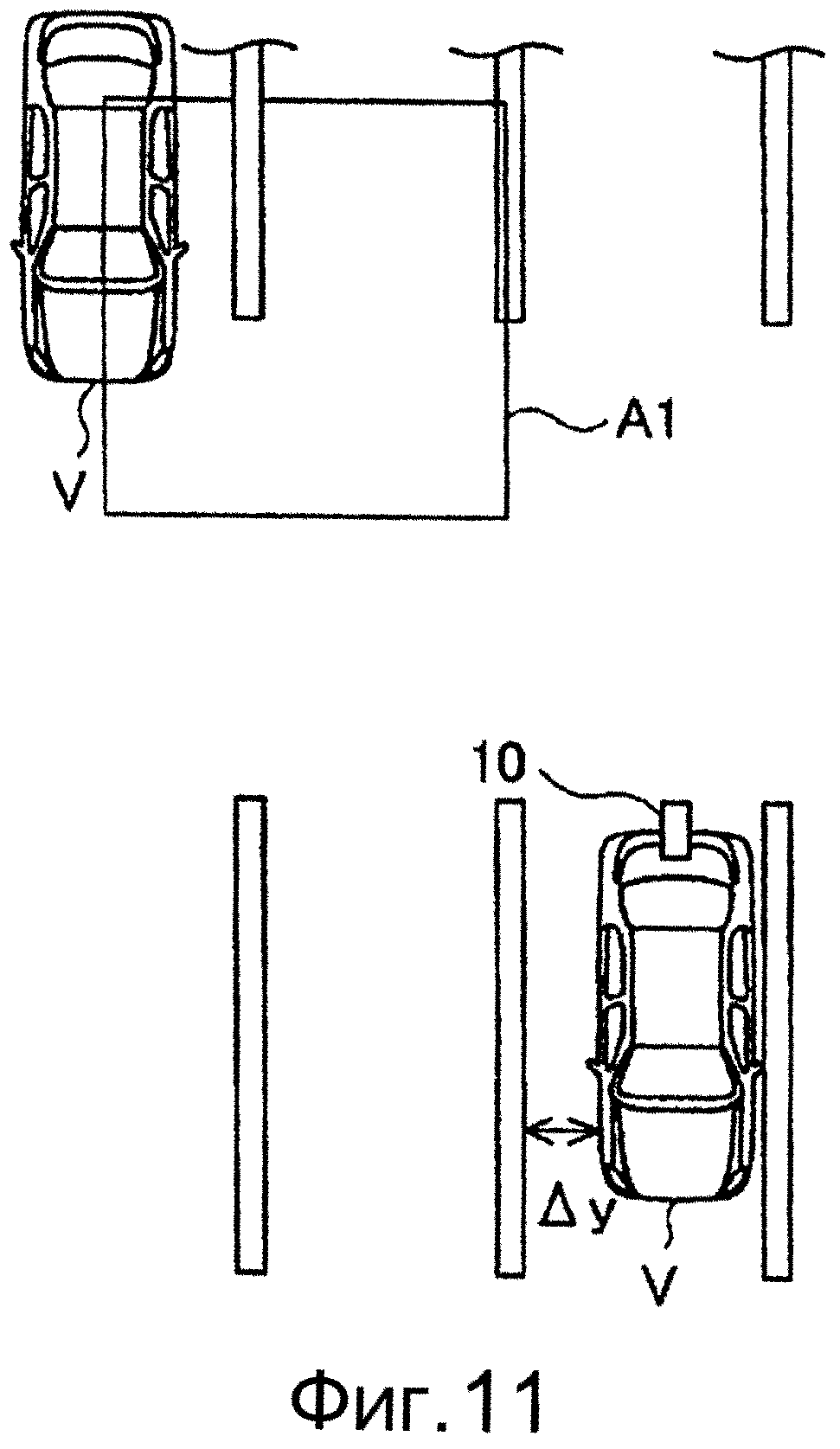
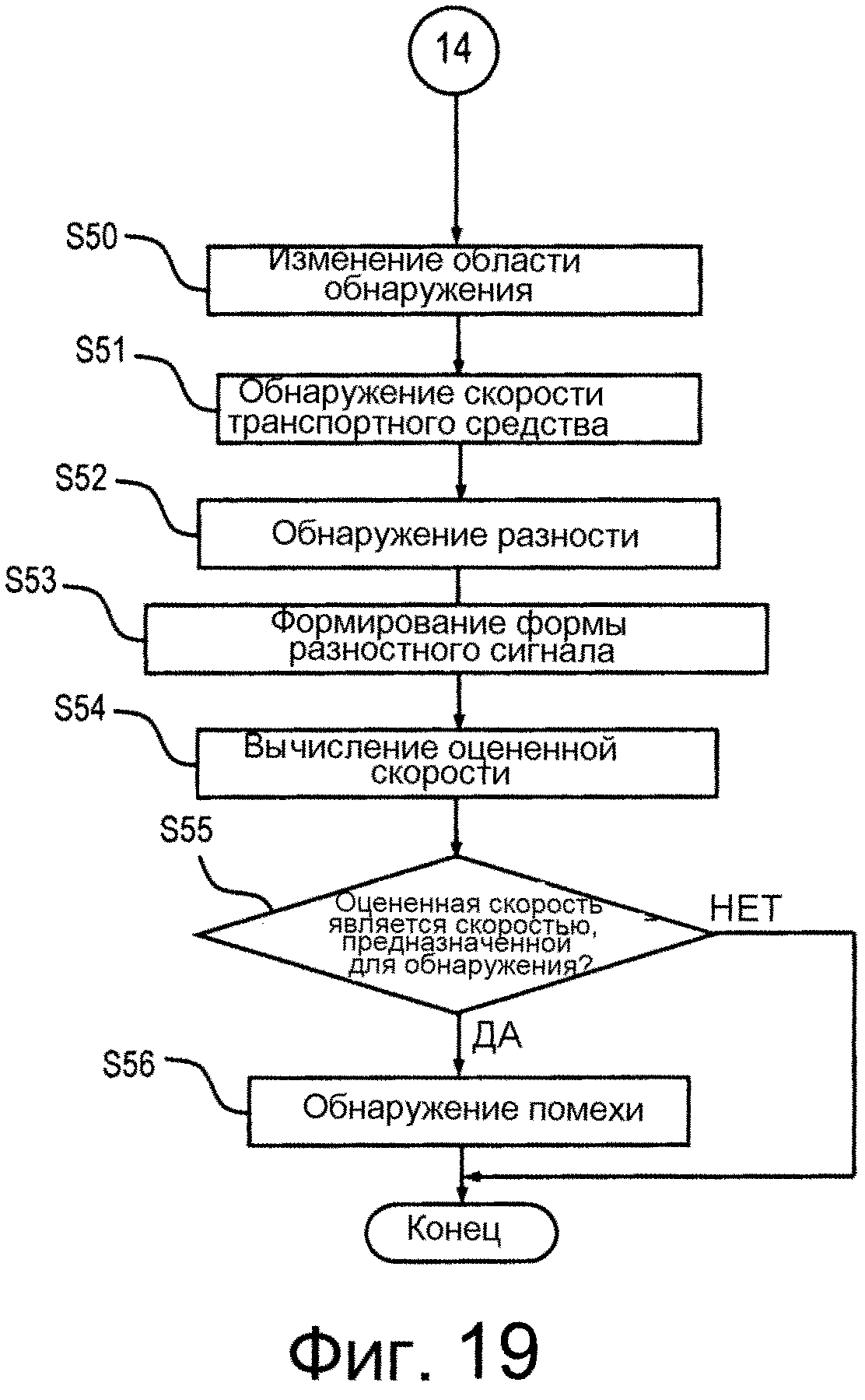
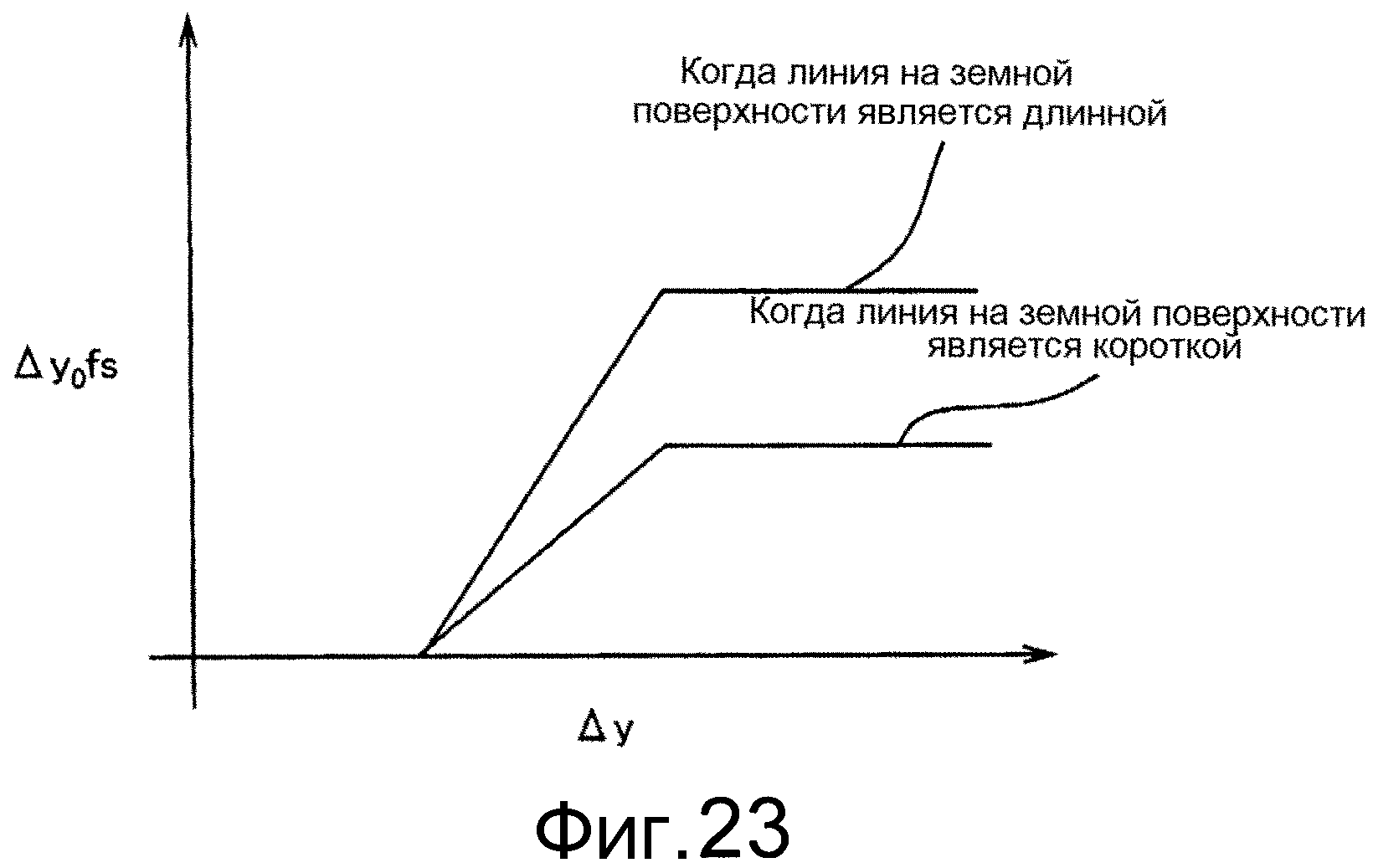
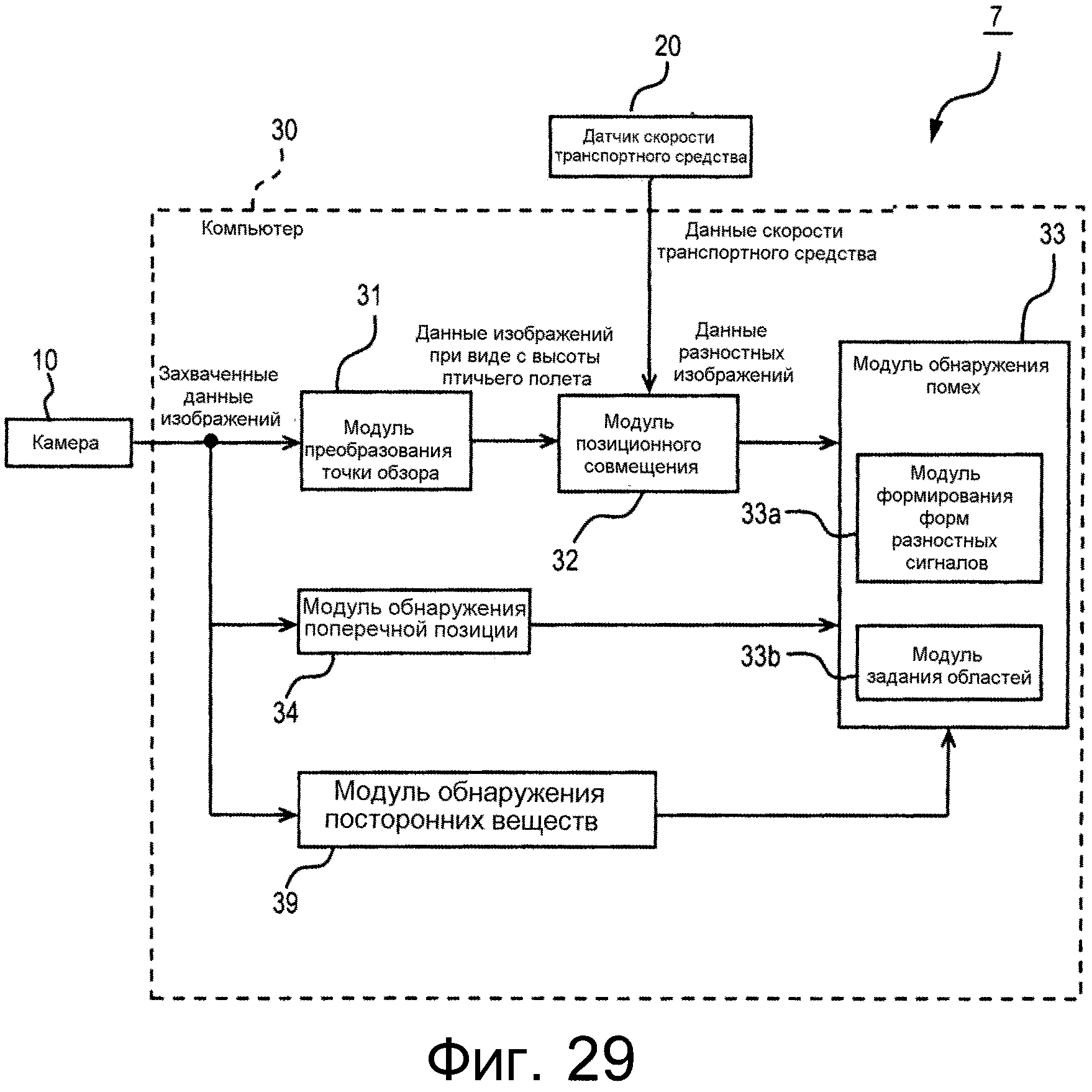
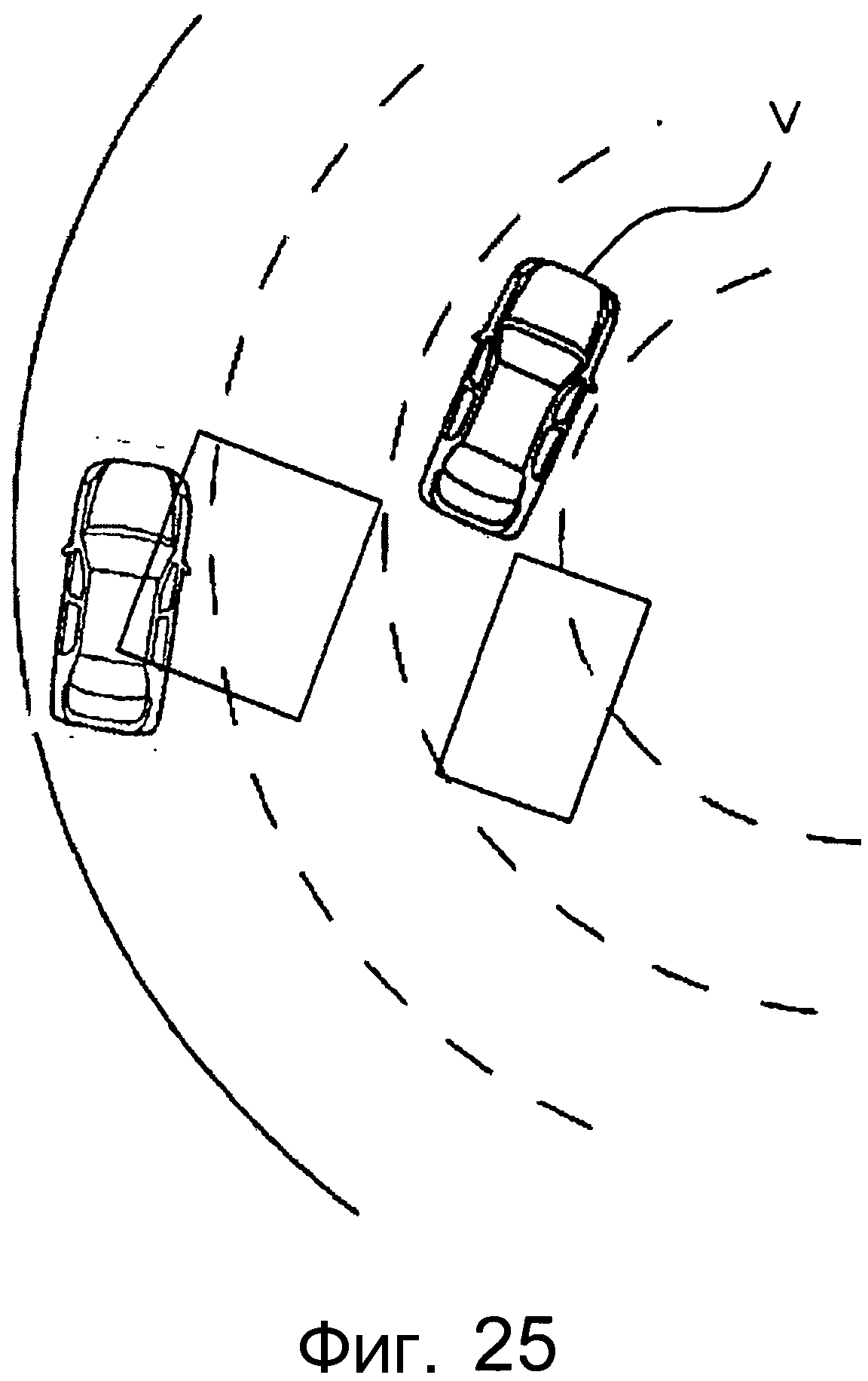
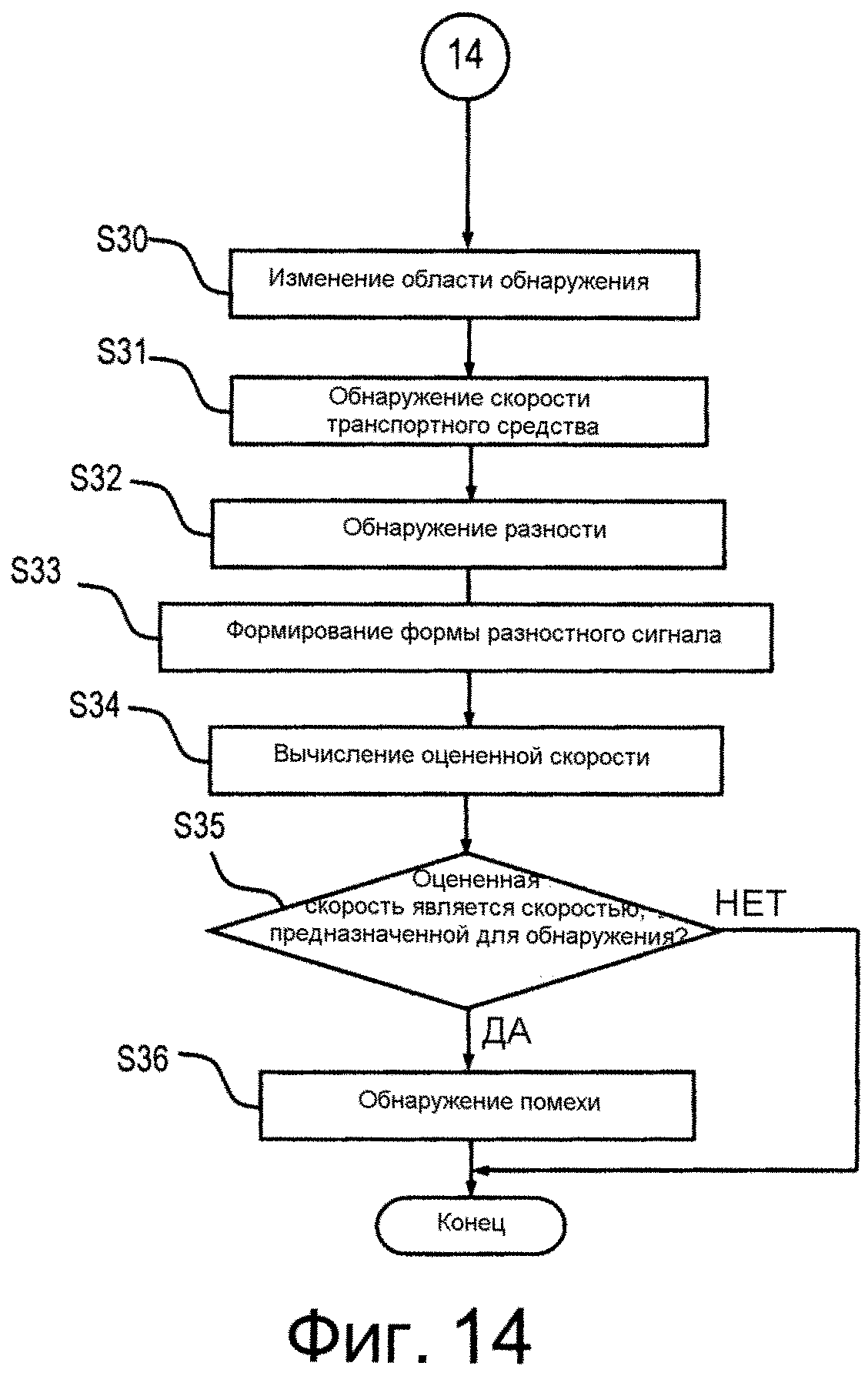
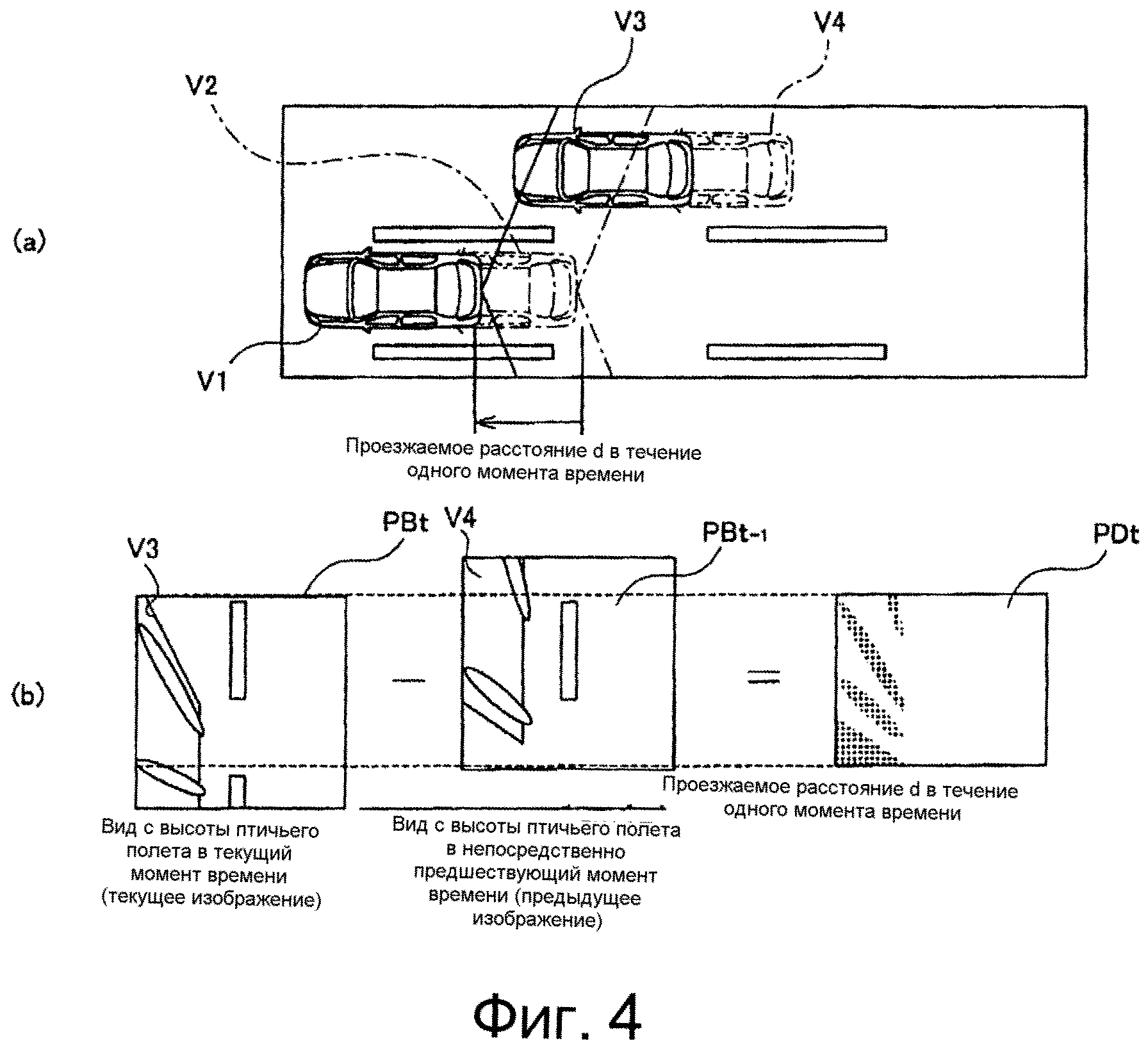
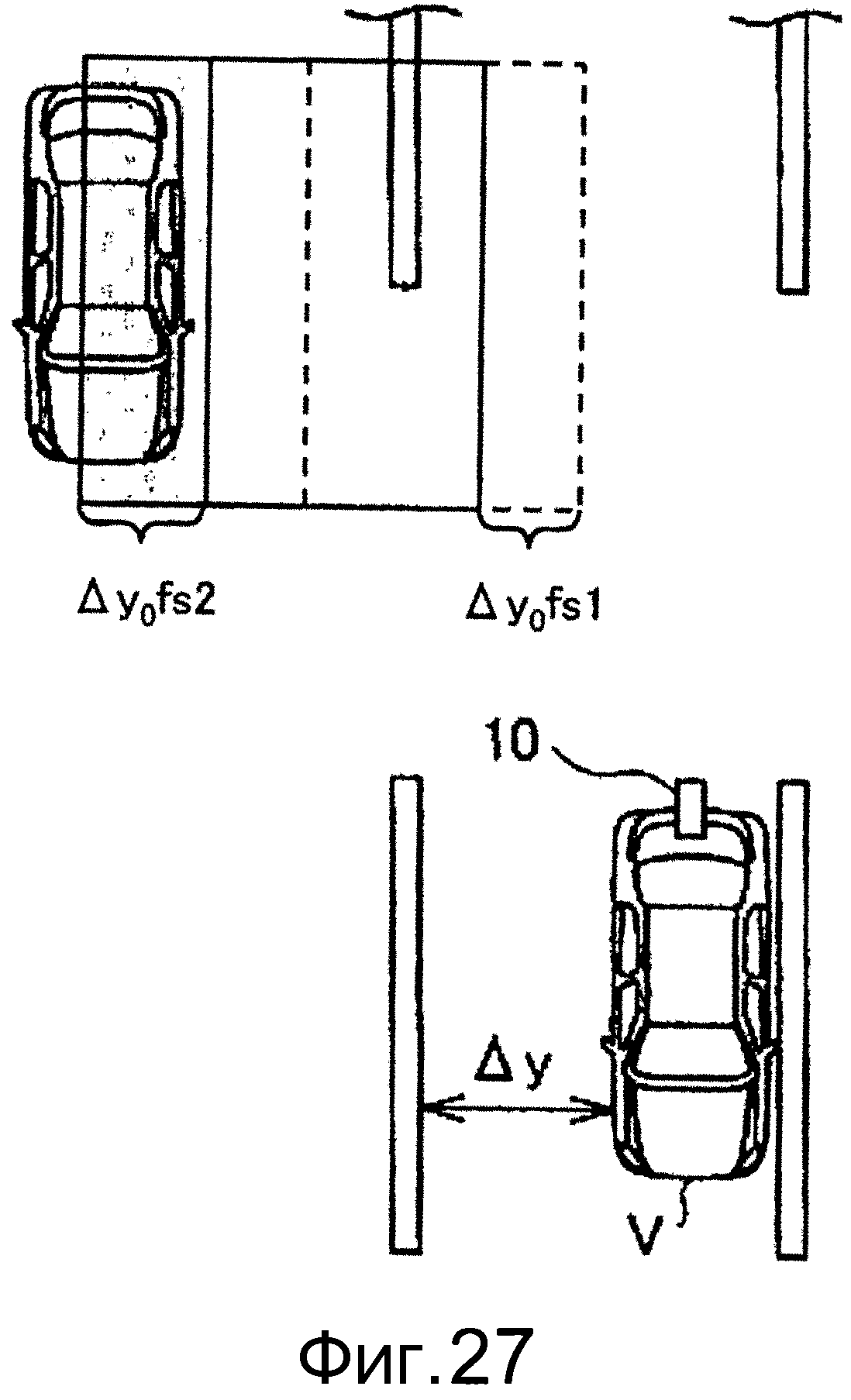
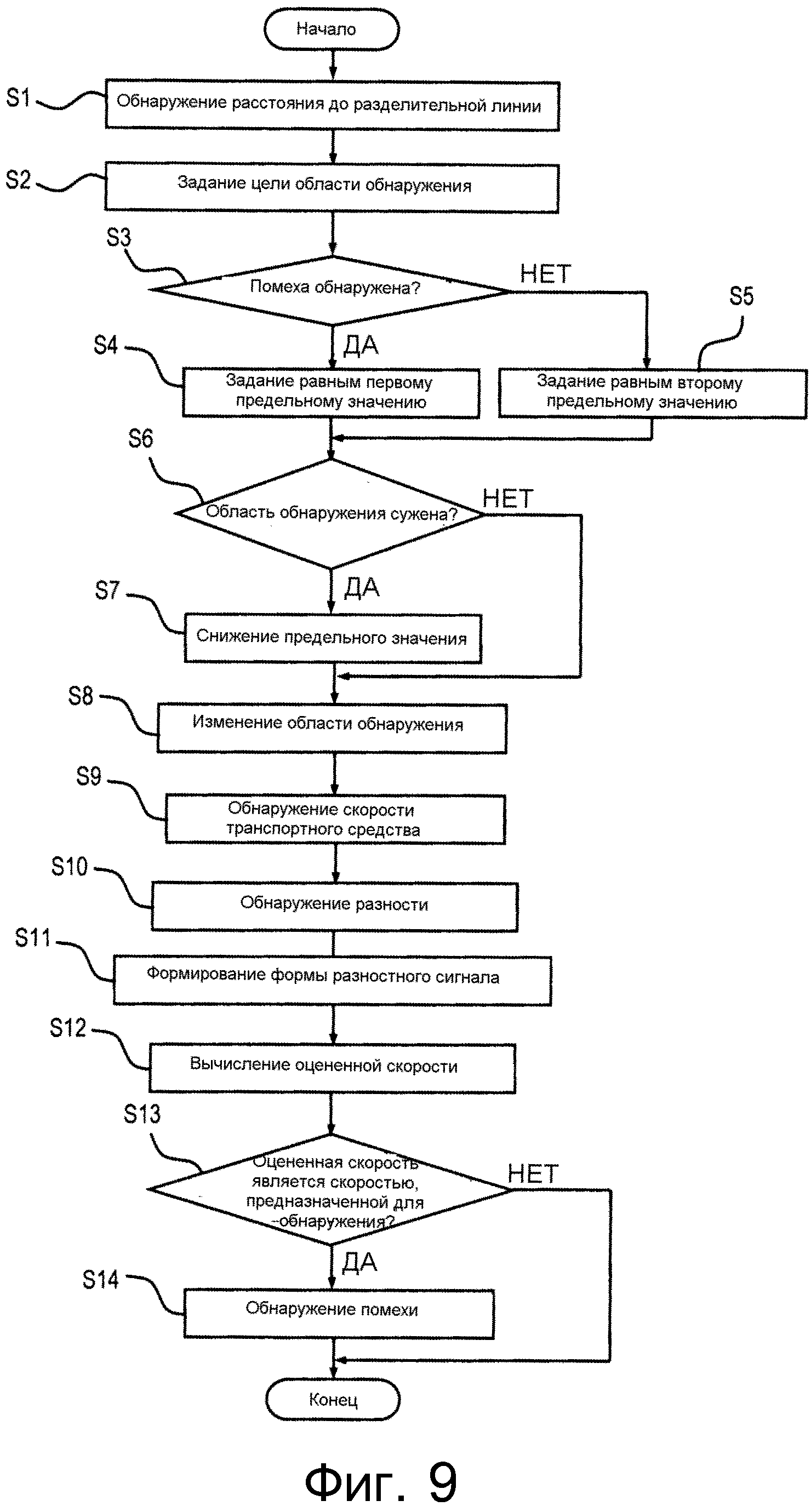
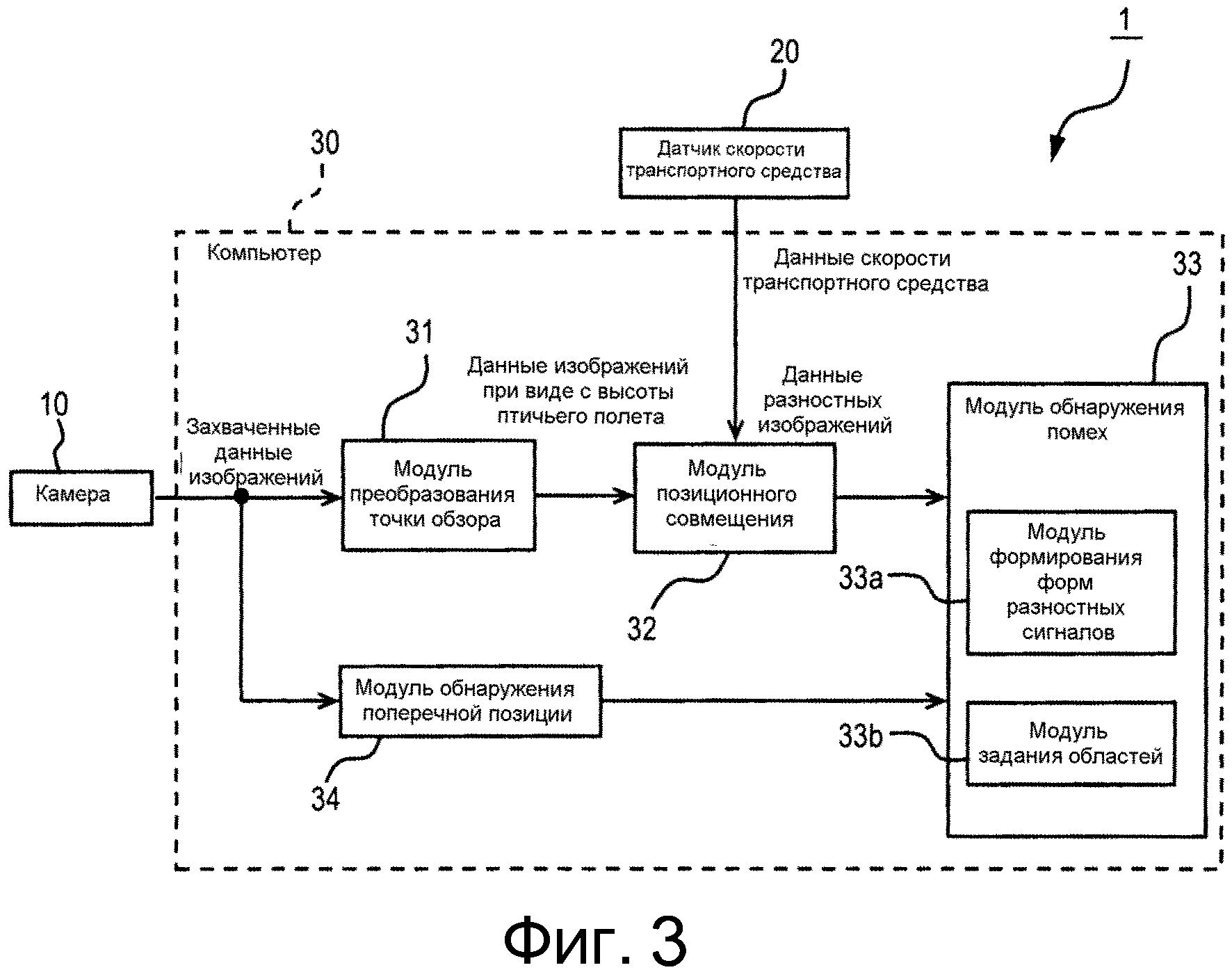
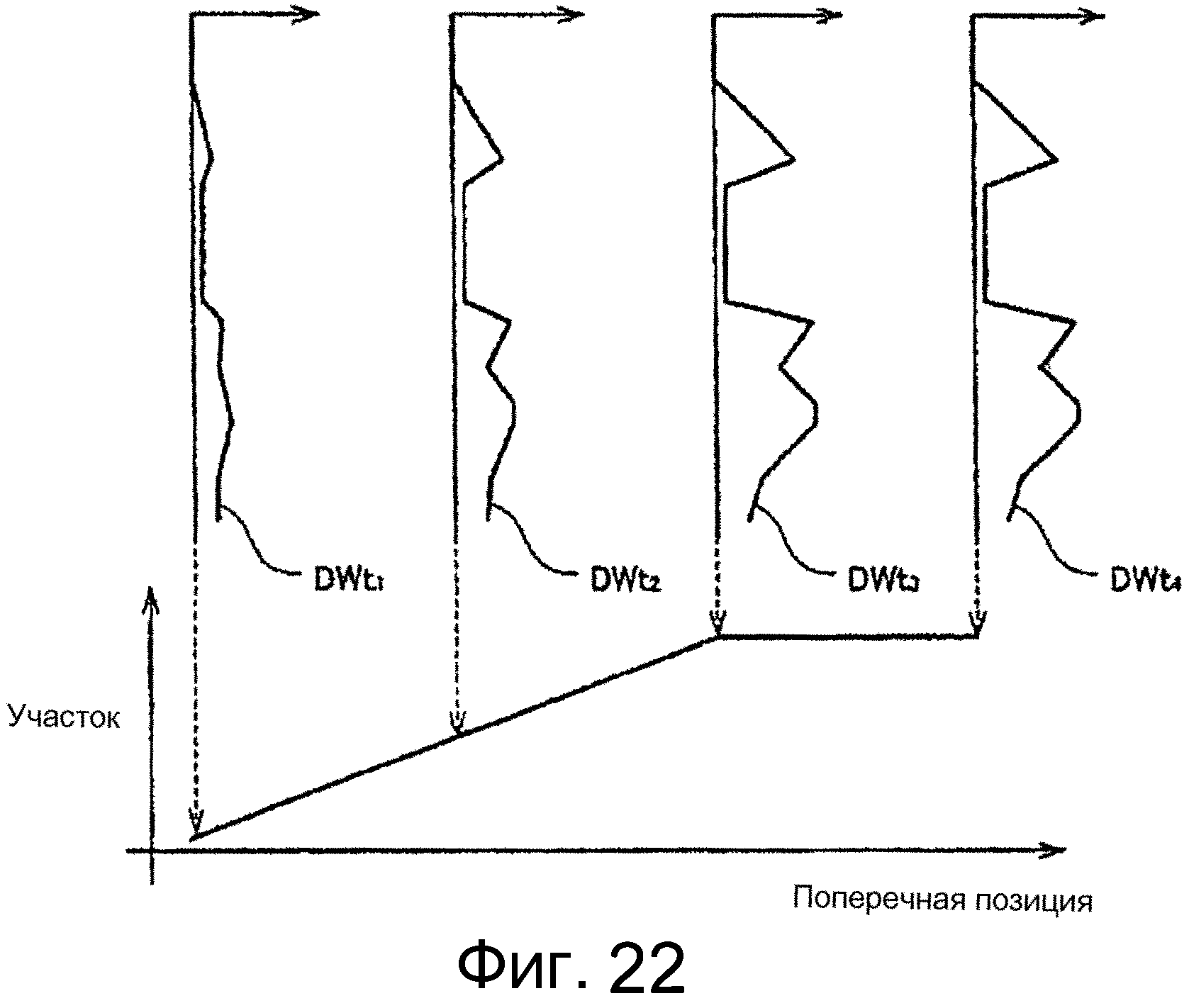
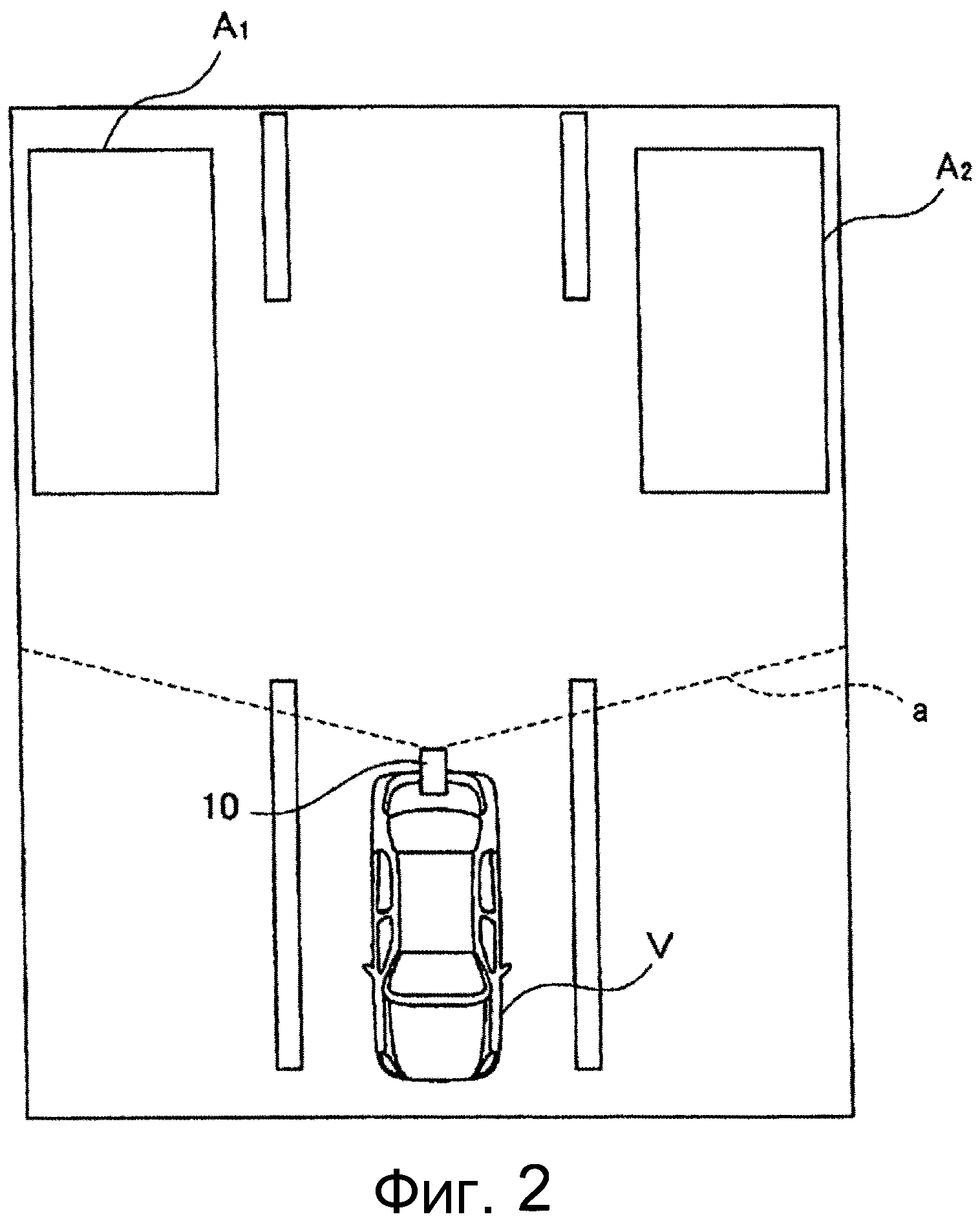
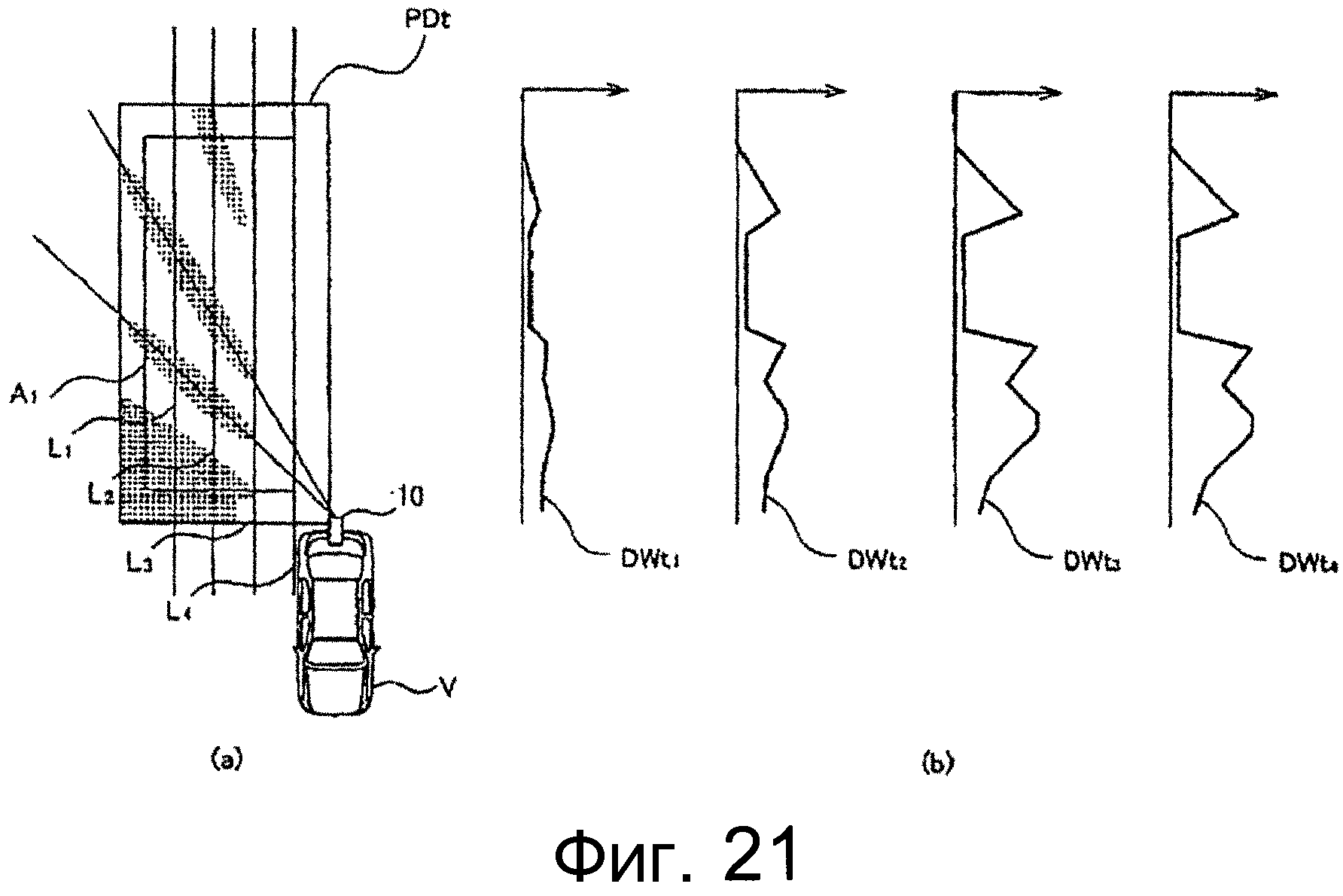
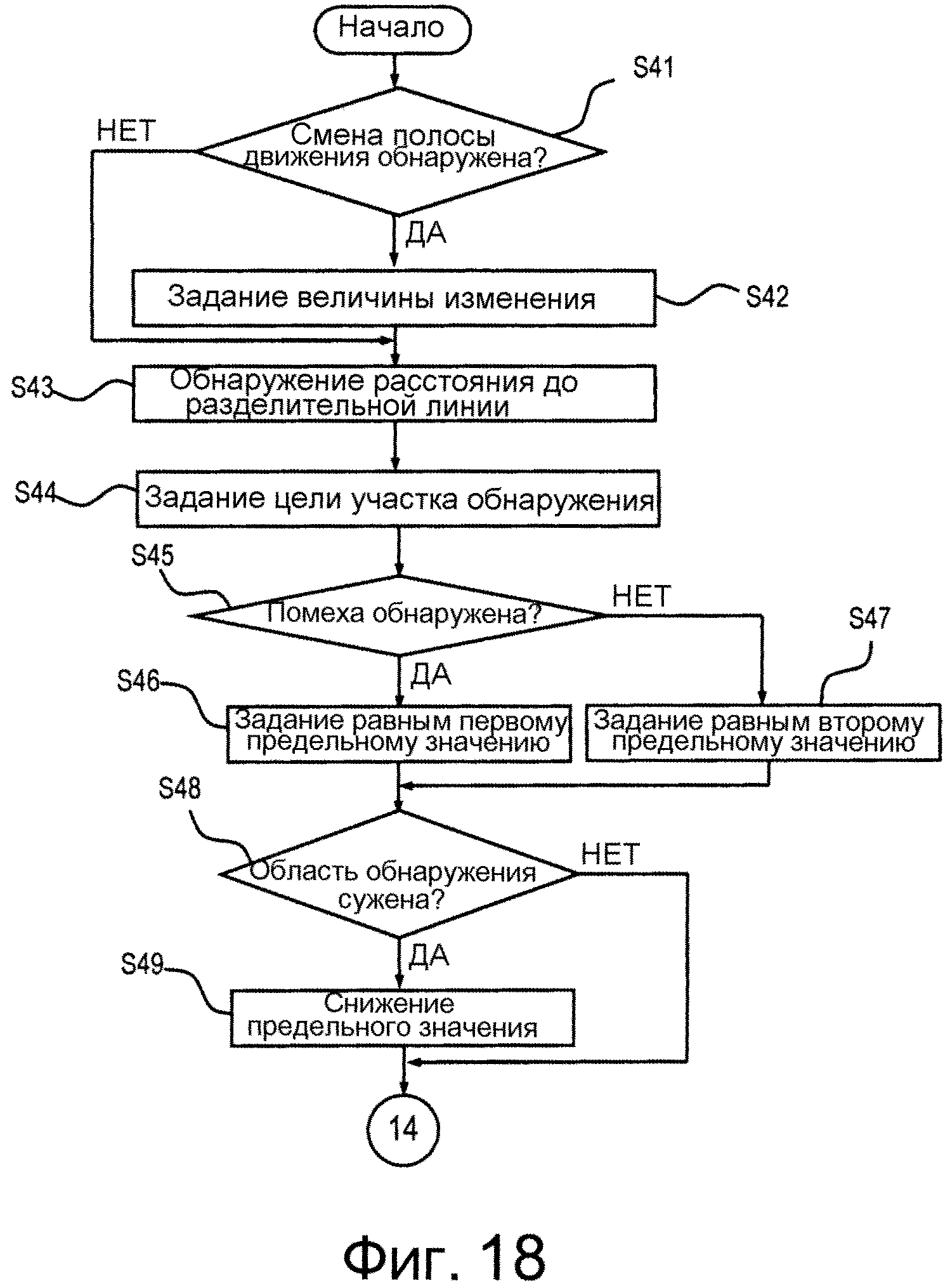
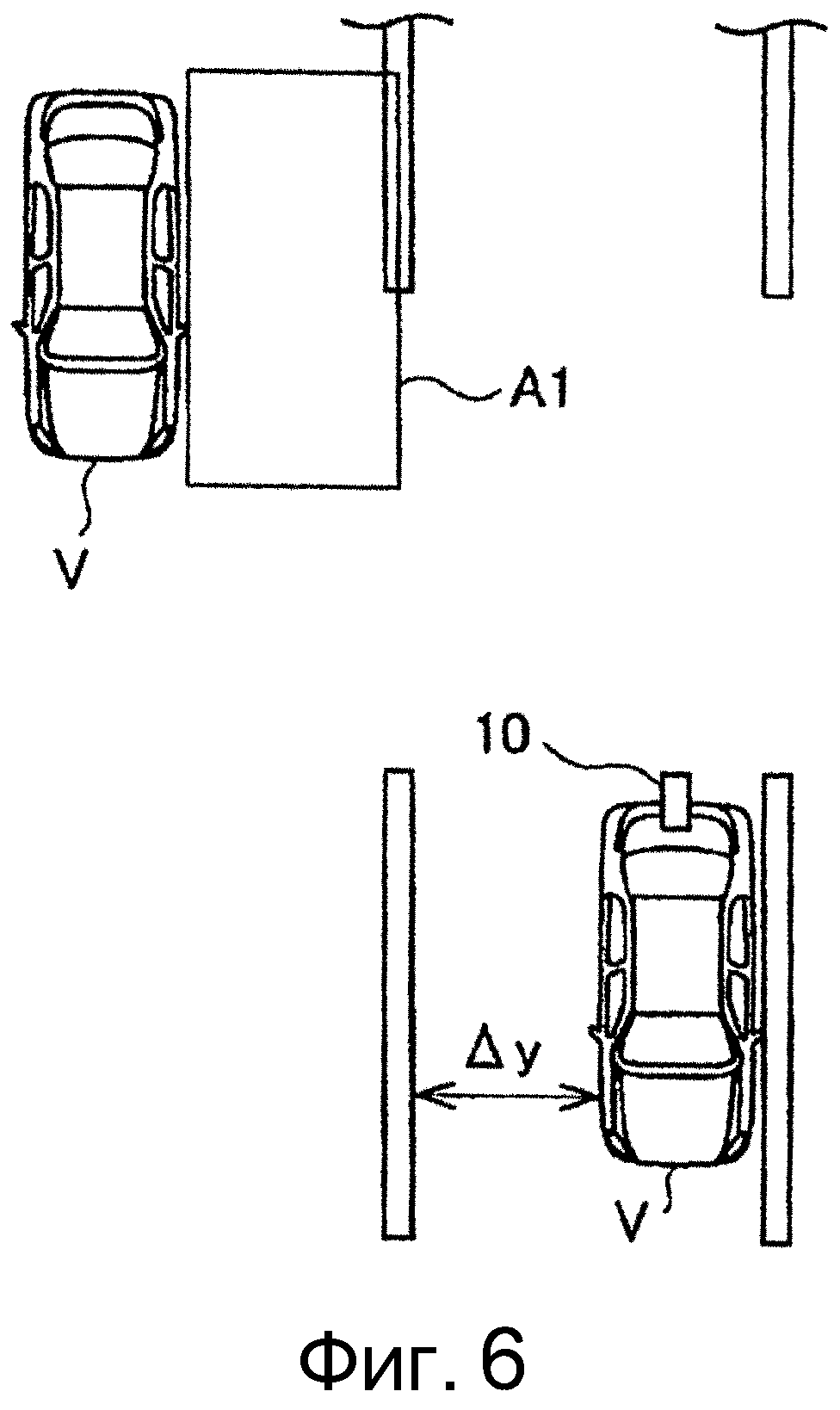
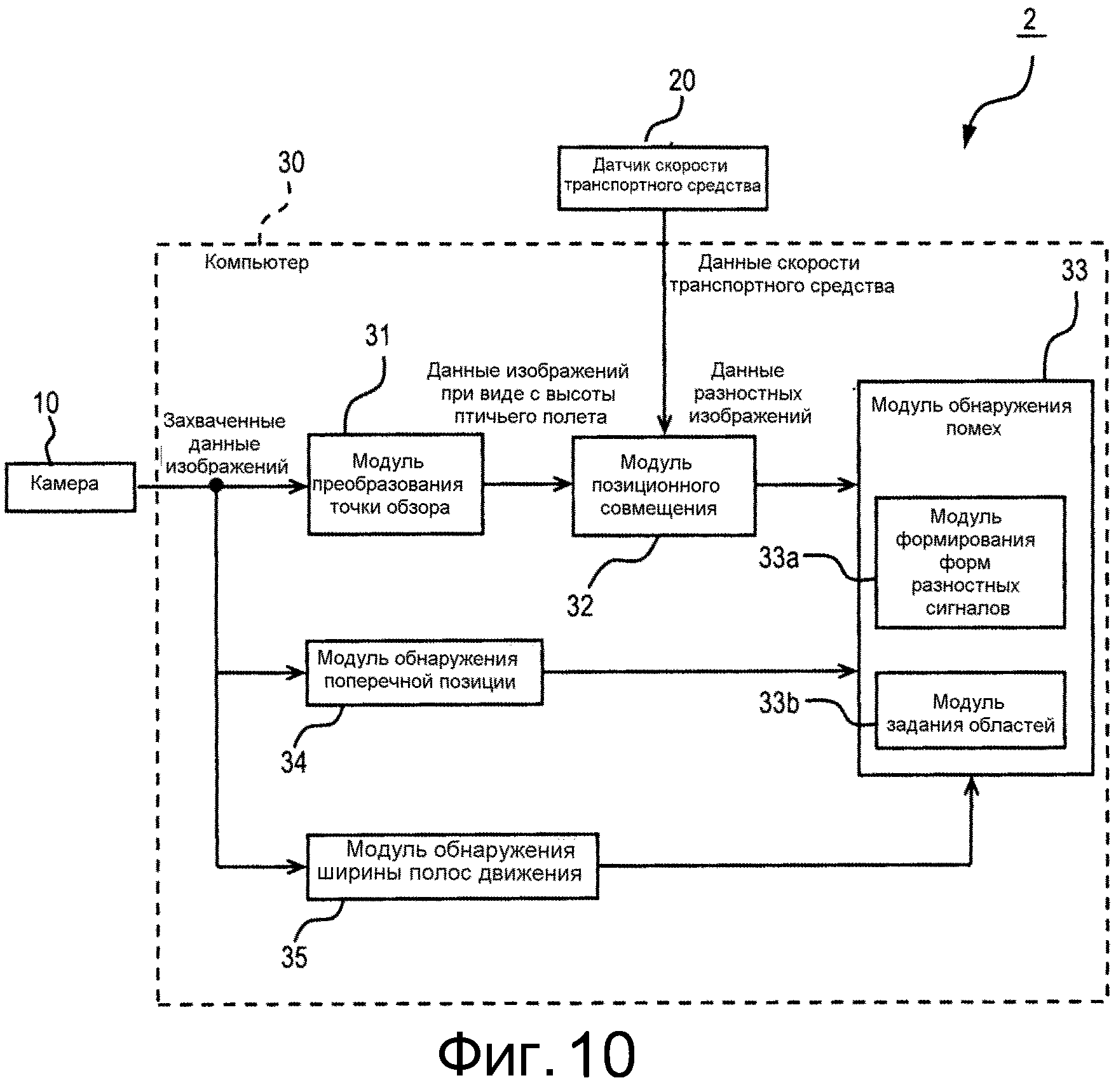
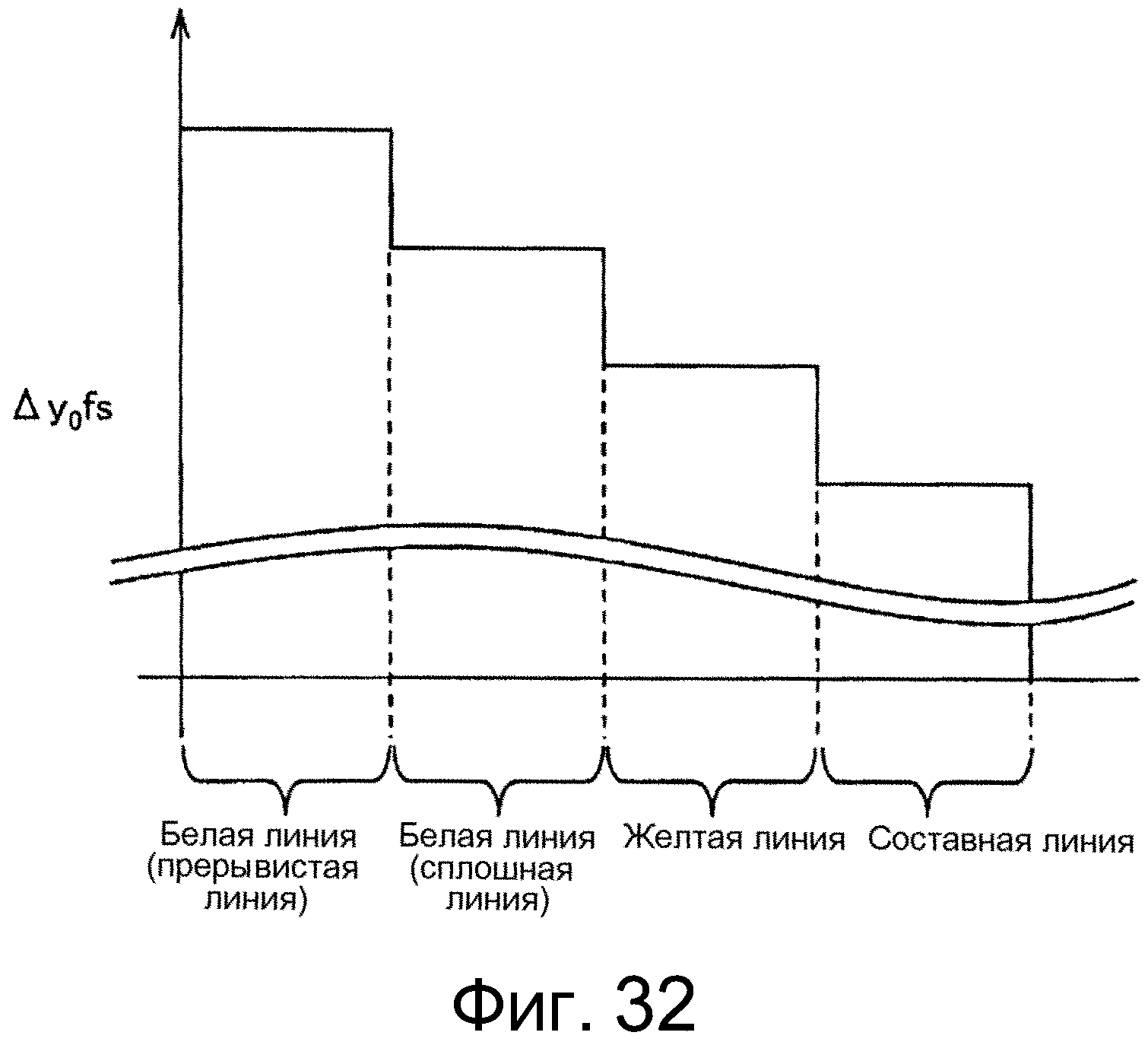
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

