Результат интеллектуальной деятельности: СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ МОРСКИХ СУДОВ
Вид РИД
Изобретение
Изобретение относится к области управления движением морских судов и предназначено для дистанционной регистрации перекладки руля морского судна по двумерным (угол - расстояние) радиолокационным наблюдениям в интересах обеспечения безопасности морского движения с целью исключения возможности наступления экстремальной ситуации «брочинг», связанной с неуправляемым разворотом судна на волнении, и столкновения морских судов.
Известные технические решения задачи управления движением судов сформулированы в патентах RU №2262466 от 20.10.2005, №2309082 от 27.01.2007 и др. Наиболее близким техническим решением является патент RU №2359860 от 27.06.2009 Способ дистанционной регистрации переложения руля морского судна по радиолокационным наблюдениям, заключающийся в том, что формируют матрицу, содержащую эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющими собой последовательность дискретных отсчетов эхо-сигналов для каждой i-й линейки, где i=1.2, …, q - номер линейки, получают биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов; исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна; устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра; выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря; с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отраженного элемента корпуса судна и которые образуют внешний контур корпуса морского судна; с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов поверхностного волнения вне корпуса судна; определяют значения порогов ограничения указанных вейвлет-коэффициентов, при которых сумма ограниченных вейвлет-коэффициентов от эхо-сигналов поверхностного волнения вне контура судна равна нулю; с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов внутри контура судна, ограничение которых выполняют с помощью упомянутых порогов; формируют биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования каждой линейки, образованной суммированием указанных вейвлет-коэффициентов каждой линейки, и исключают из нее элементы одноименной полярности, не содержащие вейвлет-спектры эхо-сигналов от локальных источников, при этом указанные вейвлет-спектры эхо-сигналов от локальных источников в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от локальных источников, образуют контуры локальных источников; одновременно с формированием вышеупомянутой биполярной матрицы устанавливают число уровней декомпозиции быстрого вейвлет-преобразования, масштаб функции непрерывного вейвлет-преобразования и число суммируемых вейвлет-коэффициентов каждой линейки на последнем уровне декомпозиции, при которых отношение амплитуды элементов вейвлет-спектров от вейвлет-коэффициентов локальных источников к амплитуде элементов вейвлет-спектров от вейвлет-коэффициентов поверхностного волнения внутри контура судна достигает максимума, формируют последовательность матриц, содержащих эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, в течение времени радиолокационного наблюдения за морским судном; на каждой матрице определяют координаты центральных элементов контуров двух максимально удаленных друг от друга локальных источников, выбранных из числа расположенных на корме и носу судна; формируют последовательность векторов, соединяющих на каждой указанной матрице центральные элементы контуров локальных источников, и определяют последовательность угловых положений указанных векторов; формируют последовательность значений углового ускорения указанных векторов, временное положение максимума которого принимают в качестве основания для дистанционной регистрации положения руля морского судна.
Однако используемый в описанном способе физический эффект требует предварительной проверки, связанной с тем, что максимальные ускорения вращательной компоненты непосредственно связаны со скоростью вращательного движения судна, величина которой определяет возможность возникновения критической ситуации «брочинг», т.е. неуправляемого разворота судна на волнении. Поэтому для повышения эффективности принятия оперативных решений по предупреждению столкновения встречных судов предлагается дополнительно измерять текущие значения вращательной скорости и ускорения (углов рыскания и их производных) и вырабатывать управляющие воздействия в зависимости от скорости движения судна и реальных данных о параметрах внешней среды.
Контроль возможности возникновения ситуации «брочинг» ведется с использованием критериев безопасности на основе нейронечеткой системы управления, функционирующей в автоматическом режиме.
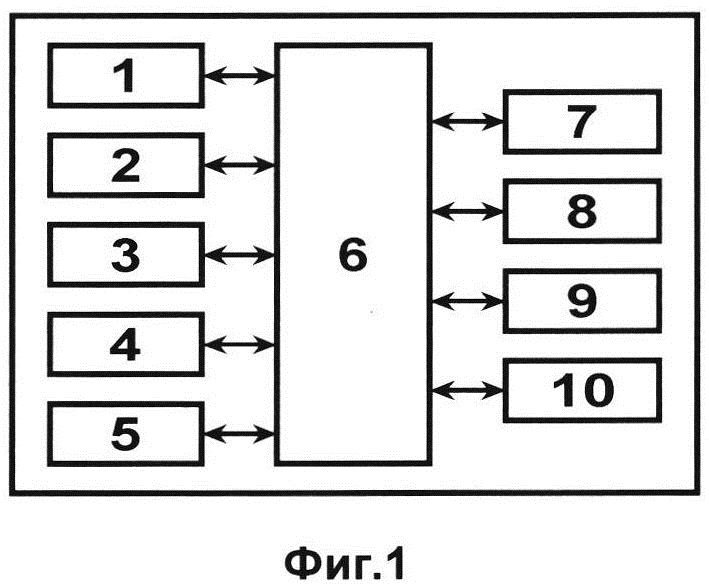
Функциональная схема, реализующая предлагаемый способ, представлена на фиг. 1. Схема содержит 10 основных блоков, где первые 5 блоков составляют измерительную систему, включающую датчики эхо-сигналов от корпуса морского судна, расположенных в носовой 1 и кормовой 2 частях судна, и поверхностного волнения моря 3, а также дополнительных датчиков, регистрирующих углы рыскания 4 и угловую скорость рыскания 5 в течение времени радиолокационного наблюдения за движением встречного судна, блок 6, осуществляющий обработку данных измерений в соответствии с алгоритмами преобразования информации, обеспечивающими дистанционную регистрацию положения руля морского судна, при выполнении которых используют результаты оценки ситуации на основе нечеткой формальной системы (НФС), включающей управляющий алгоритм 7, искусственную нейронную сеть (ИНС) 8, обучающую систему на основе генетического алгоритма (ГА) 9 и блок отображения и документирования информации с использованием цветного графического дисплея 10.
Оценка динамики взаимодействия при расхождении морских судов реализуется на основе концепции мягких вычислений (soft computing) [3], в основу которой заложены теоретические принципы формализации знаний с использованием нечеткой логики, теории ИНС и ГА. Ниже рассмотрены функциональные блоки 7-10, реализующие контроль экстремальной ситуации «брочинг» в процессе предварительного анализа ситуации расхождения на основе НФС.
Блок 7 содержит управляющий механизм НФС, который представляется набором логических правил «IF - THEN». Каждое правило содержит в левой части переменные состояния, а в правой части переменную, характеризующую управление (действие). В качестве исходной информации, определяющей работу логических правил, используют угол рыскания χ 4 и скорость изменения этого угла dχ/dt 5. Управление принимают в виде изменения (снижения) скорости движения судна V. Алгоритм представляют в виде матрицы управления размерности 5×5, элементами которой являются значения нечетких переменных задачи (фиг. 2).
Рассматриваемое нечеткое множество разбито на пять классов для каждой нечеткой переменной. Набор значений лингвистических переменных «угол отклонения» и «угловая скорость рыскания» представляется в виде следующих стандартных обозначений: PS - positive small, PM - positive medium, ZE - zero, NS - negative small, NM - negative medium. Пустые ячейки матрицы управления указывают, что никакие действия для данного состояния нечеткой системы предприниматься не должны.
Функционирование системы управления судном на волнении обеспечивается с использованием нечетких логических правил:


где через X1 и Х2 обозначены нечеткие нормируемые значения угла и угловой скорости рыскания, заданные соответствующими значениями функций принадлежности (ФП) (фиг. 3).
По результатам измерений вычисляют значения критериальных характеристик X1 и Х2. Используя конъюнкцию для левых частей правил 1 и 2, получаем


В результате имеем:

где μc1-1 и μс2-1 - ФП, величина которых определяется на основе данных о μ(X1), μ(Х2), μ(Y) по схеме фиг. 3.
Средневзвешенную величину вклада правил 1 и 2 с использованием дефаззификации вычисляют в соответствии с формулой:

которая характеризует четкое значение выходной характеристики (управляющего воздействия Y), где n - число правил в системе.
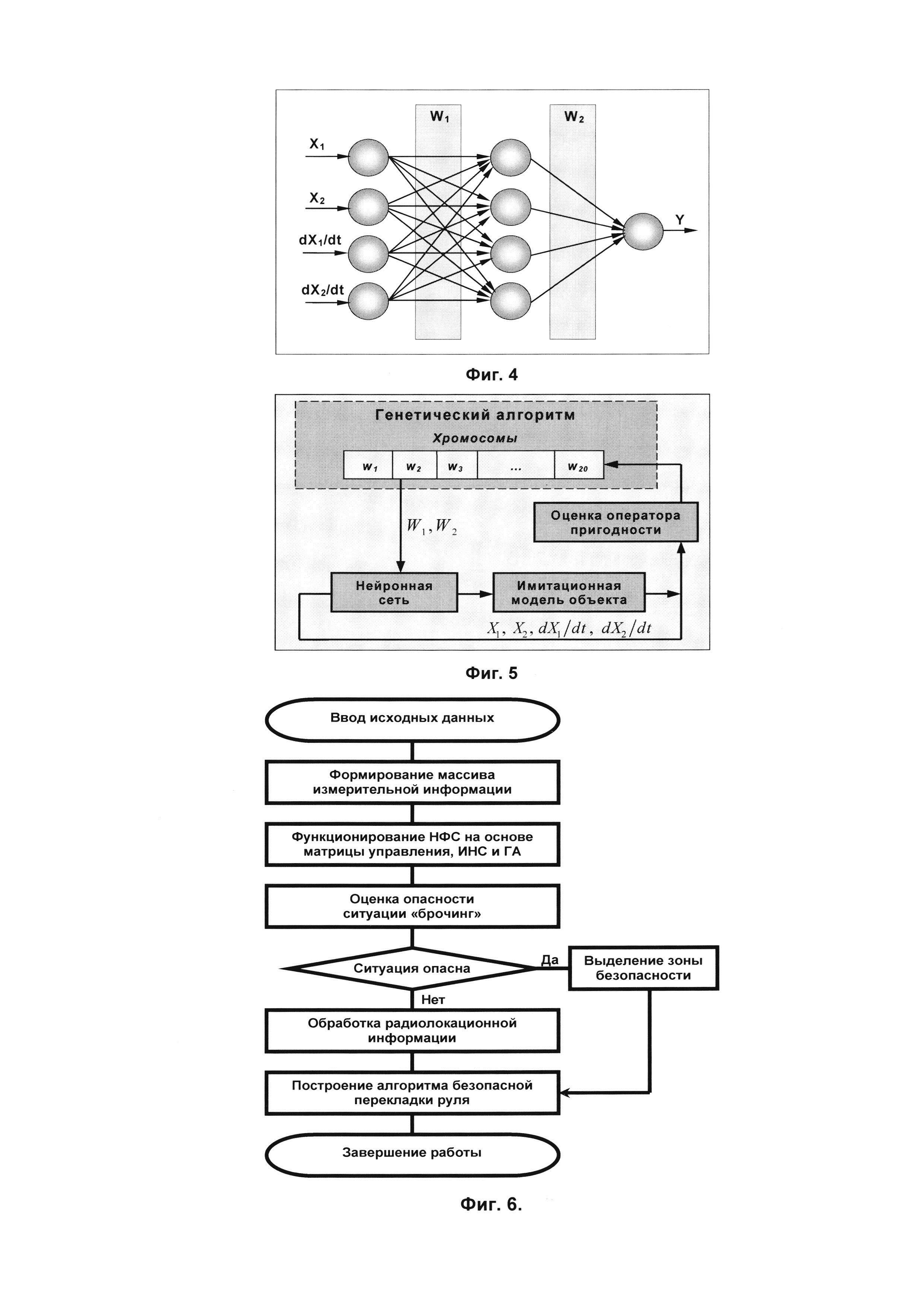
Блок 8 генерации управляющих воздействий реализуется на основе ИНС, схема которой представлена на фиг. 4. ИНС имеет два управляющих входа X1 и Х2 и один управляющий выход Y. Обучение сети осуществляют с помощью ГА на значениях ФП для X1 и Х2, подаваемых на вход НФС, и значениях Y, представляемых на выходе. Нейронная сеть имеет 20 неизвестных значений синоптических весов в матрицах W1 и W2.
Блок 9 обеспечивает функционирование ГА (фиг. 5) на базе исходной информации, которую представляют в виде структуры (хромосомы). Вес конкретной связи такой структуры кодируют цепочкой битов. Функция пригодности позволяет оценивать в процессе управления заданный набор синоптических весов. В результате формируется сложная многомерная поверхность ошибки управления как функция параметров закона управления. ГА находит глобальный минимум этой поверхности. Настройка синоптических весов матриц W1 и W2 обеспечивает функционирование НФС контроля возможности возникновения экстремальной ситуации «брочинг» в режиме реального времени.
Блок 10 отображает результаты контроля и вырабатывает практические рекомендации по предотвращению возникновения экстремальной ситуации «брочинг» и возможности реализации управления судном при расхождении на основе алгоритма преобразования информации, обеспечивающего дистанционную регистрацию положения руля морского судна.
Стратегия программного управления на основе НФС обеспечивает перевод системы, определяющей расхождение судов, из начального состояние в конечное с учетом требований безопасности контролируемой ситуации на интервале реализации [t0,tk]:

Задача управления, генерации альтернатив и выбора решения при интерпретации системы расхождения представляется в виде:

где М - модель динамики взаимодействующих судов; JE - минимизирующий функционал; S - стратегия реализации оптимального управления; Q - характерные ограничения, установленные исходя из условий безопасности расхождения.
Решение задачи управления (8) реализуется на основе множества исходных данных

где W - возмущающие воздействия и характеристики расходящихся судов, установленные на основе данных динамических измерений в блоках 1-5; U0 и U1 - нижние и верхние границы интервала изменения управляющих воздействий.
Принятие решений по предупреждению столкновений расходящихся судов обеспечивается на основе анализа условий (1)-(9) с помощью логического правила НФС:

где величины А1i и A2i характеризуют условия, сформулированные на основе критериев безопасности ситуации «брочинг»; Вi - результат вывода о безопасности ситуации расхождения S на интервале [t0,tk].
Алгоритм выполнения процедур (1)-(10) представлен на фиг. 6.
Практический пример контроля ситуации «брочинг» рассмотрен применительно к судну (сейнер РС-708), опрокинувшемуся на попутном волнении. Значения критериев безопасности вычислены на основе данных, приведенных в работе [1]: критическое значение угла рыскания 4,8°, фактическое значение угла рыскания 5.5°; опрокидывающий момент 28685 тм, кренящий момент 36219 тм; критерий погоды 0.7917; частотные соотношения - за пределами возникновения резонансных режимов.
Из приведенных данных следует, что ситуация «брочинг» для заданных внешних условий не позволяет проводить операции по безопасному расхождению судов, несмотря на благоприятные условия, определяющие частотные соотношения при заданном режиме движения судна. В этих условиях НФС осуществляет поиск моментов времени для проведения операции расхождения на интервале реализации.
Сопоставление результатов расчета с данными физического моделирования выполнено для наиболее корректного эксперимента, поставленного с самоходной радиоуправляемой моделью сейнера, испытанной в условиях естественного волнения [1]. Результаты сопоставления представлены в табл. 1, где НВ - пакет нерегулярных волн; КФ - пакет классической формы;  - средняя высота волны в реализации; hw/λ - крутизна волны; ϕ - курсовой угол волны; V - скорость судна; Ik - максимальное плечо гидродинамического момента; 1 - эксперимент, 2 - расчет;
- средняя высота волны в реализации; hw/λ - крутизна волны; ϕ - курсовой угол волны; V - скорость судна; Ik - максимальное плечо гидродинамического момента; 1 - эксперимент, 2 - расчет;  - опрокидывание,
- опрокидывание,  - «захват» судна без опрокидывания.
- «захват» судна без опрокидывания.
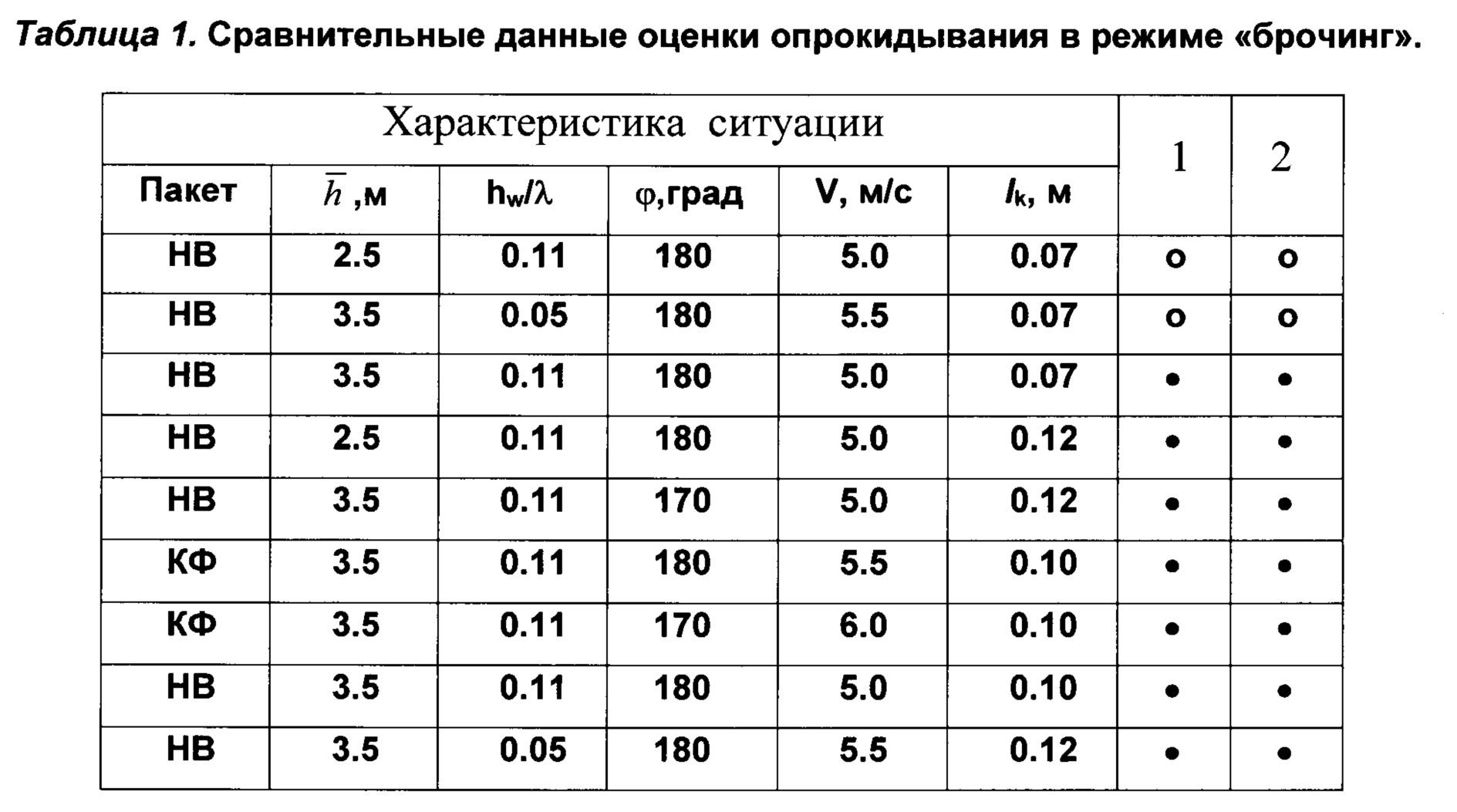
Таким образом, использование новых принципов обработки информации на основе совместного использования матрицы нечеткого управления, ИНС и ГА обеспечивает моделирование и поиск закона управления расхождением судов в сложной динамической среде, связанной с рысканием судна на попутном волнении и возможностью возникновения неуправляемого разворота и опрокидывания.
Способ предупреждения столкновения морских судов, состоящий в дистанционной регистрации переложения руля морского судна по радиолокационным наблюдениям, заключающийся в том, что формируют матрицу, содержащую эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющими собой последовательность дискретных отсчетов эхо-сигналов для каждой i-й линейки, где i=1.2, …, q - номер линейки, получают биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов; исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна; устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра; выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря; с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отраженного элемента корпуса судна и которые образуют внешний контур корпуса морского судна; с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов поверхностного волнения вне корпуса судна; определяют значения порогов ограничения указанных вейвлет-коэффициентов, при которых сумма ограниченных вейвлет-коэффициентов от эхо-сигналов поверхностного волнения вне контура судна равна нулю; с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов внутри контура судна, ограничение которых выполняют с помощью упомянутых порогов; формируют биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования каждой линейки, образованной суммированием указанных вейвлет-коэффициентов каждой линейки, и исключают из нее элементы одноименной полярности, не содержащие вейвлет-спектры эхо-сигналов от локальных источников, при этом указанные вейвлет-спектры эхо-сигналов от локальных источников в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от локальных источников, образуют контуры локальных источников; одновременно с формированием вышеупомянутой биполярной матрицы устанавливают число уровней декомпозиции быстрого вейвлет-преобразования, масштаб функции непрерывного вейвлет-преобразования и число суммируемых вейвлет-коэффициентов каждой линейки на последнем уровне декомпозиции, при которых отношение амплитуды элементов вейвлет-спектров от вейвлет-коэффициентов локальных источников к амплитуде элементов вейвлет-спектров от вейвлет-коэффициентов поверхностного волнения внутри контура судна достигает максимума, формируют последовательность матриц, содержащих эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, в течение времени радиолокационного наблюдения за морским судном; на каждой матрице определяют координаты центральных элементов контуров двух максимально удаленных друг от друга локальных источников, выбранных из числа расположенных на корме и носу судна; формируют последовательность векторов, соединяющих на каждой указанной матрице центральные элементы контуров локальных источников, и определяют последовательность угловых положений указанных векторов; формируют последовательность значений углового ускорения указанных векторов, временное положение максимума которого принимают в качестве основания для дистанционной регистрации положения руля морского судна, отличающийся тем, что дополнительно измеряют углы рыскания и угловую скорость рыскания, по данным измерений формируют нечеткую формальную систему (НФС) управления безопасным расхождением судов с использованием непрерывного контроля в режиме реального времени возможности возникновения экстремальной ситуации «брочинг» и опрокидывания судна в процессе неуправляемого разворота судна на волнении, на основе функциональных элементов НФС обеспечивают выполнение алгоритма контроля с использованием матрицы нечеткого управления, нейронной сети и генетического алгоритма, прогнозируют моменты времени возникновения неблагоприятных условий взаимодействия судна с внешней средой и выбирают оптимальные режимы проведения операции безопасного расхождения движущихся судов.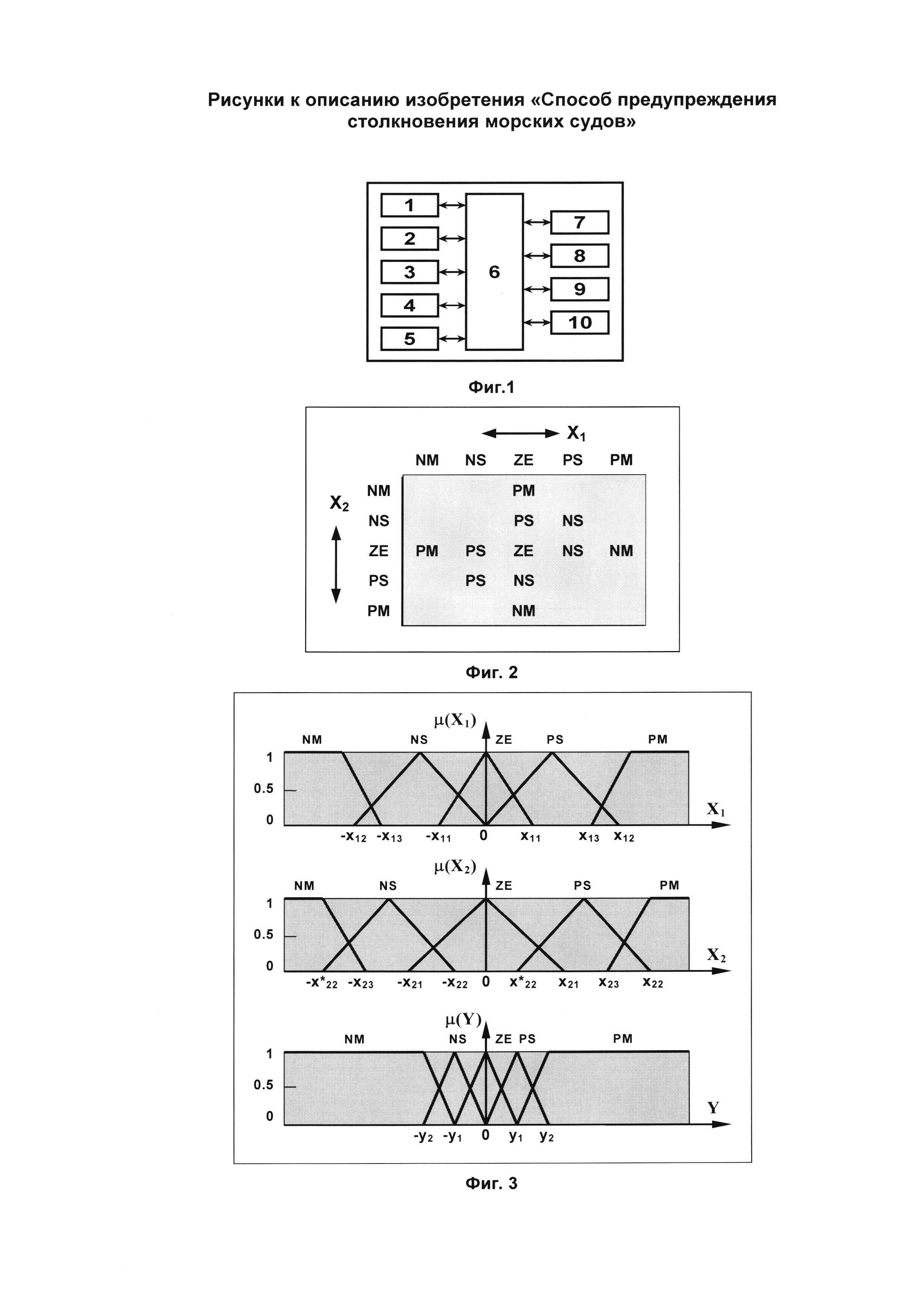
Способ автоматизированного управления проектированием бортовых интеллектуальных систем
Способ контроля непотопляемости судна
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент грид-системы
Способ прогнозирования качки судна при контроле посадки летательных аппаратов в морских условиях
Способ контроля экстремальных ситуаций в условиях неопределенности среды
Способ проектирования многорежимной интеллектуальной системы управления распределенной средой мягких вычислений
Способ оперативного контроля остойчивости судна в чрезвычайных ситуациях
Способ эволюционного моделирования эпидемической динамики вич-инфекции
Способ автоматизированного управления проектированием бортовых интеллектуальных систем
Способ контроля непотопляемости судна
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент грид-системы
Способ прогнозирования качки судна при контроле посадки летательных аппаратов в морских условиях
Способ контроля экстремальных ситуаций в условиях неопределенности среды
Способ проектирования многорежимной интеллектуальной системы управления распределенной средой мягких вычислений
Способ оперативного контроля остойчивости судна в чрезвычайных ситуациях
Способ контроля остойчивости судна в условиях экстремального волнения
Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф
Способ эволюционного моделирования эпидемической динамики вич-инфекции

