Результат интеллектуальной деятельности: СПОСОБ ПРОГНОЗИРОВАНИЯ КАЧКИ СУДНА ПРИ КОНТРОЛЕ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В МОРСКИХ УСЛОВИЯХ
Вид РИД
Изобретение
Изобретение относится к судостроению, а именно к способам прогнозирования качки судна, позволяющим обеспечить надежную посадку летательных аппаратов (ЛА) на суда и плавучие технические средства освоения Мирового океана, в том числе научно-исследовательские суда, буровые платформы и др.
Цель изобретения - повышение достоверности прогноза «окна безопасной посадки» при значительных ветроволновых воздействиях на основе принципа конкуренции.
Наиболее близким техническим решением оперативного контроля посадки ЛА является «Способ прогнозирования качки судна» по патенту RU №2019856 от 15.09.94. Этот патент использован в качестве прототипа.
Известен способ прогнозирования качки судна, включающий измерение текущих угловых перемещений палубы судна и формирование на основе предыдущих и последующих измерений перемещений методами экстраполяции модели качки, дополнительном измерении величин скоростей и перемещений при бортовой и килевой качке, сравнении величин перемещений и скоростей перемещений с предельно допустимыми значениями амплитуд бортовой и килевой качки, заданными из условия безопасной посадки, определении по результатам сравнения области незначительной качки, корректировке спрогнозированной модели и сигнализации летчику о моментах начала и завершения взлетно-посадочных операций в заданных погодных условиях.
Однако этот способ недостаточно эффективен при значительных ветроволновых воздействиях, поскольку надежный контроль может быть обеспечен только на основе принципа конкуренции, позволяющего использовать в качестве конкурирующей вычислительной технологии нейронечеткую модель, построенную в рамках теории адаптивных систем.
Целью изобретения является повышение достоверности прогноза при значительных ветроволновых воздействиях путем оперативного контроля параметров внешней среды, динамики судна и ЛА в процессе осуществления взлетно-посадочных операций, обеспечивающих безопасную посадку в сложных погодных условиях.
Технический результат достигается тем, что используют принцип конкуренции при выборе предпочтительной вычислительной технологии на основе фильтра Калмана и нейронечеткой модели и в рамках выделенной технологии осуществляют моделирование и вырабатывают практические рекомендации по проведению взлетно-посадочных операций.
На фиг. 1 представлена функциональная схема, реализующая предлагаемый способ, на фиг. 2 и 3 - структуры данных, реализующие интеллектуальную систему (ИС) и принцип конкуренции, на фиг. 4 - адаптивная нейронечеткая модель, на фиг. - 5 структура адаптивного блока.
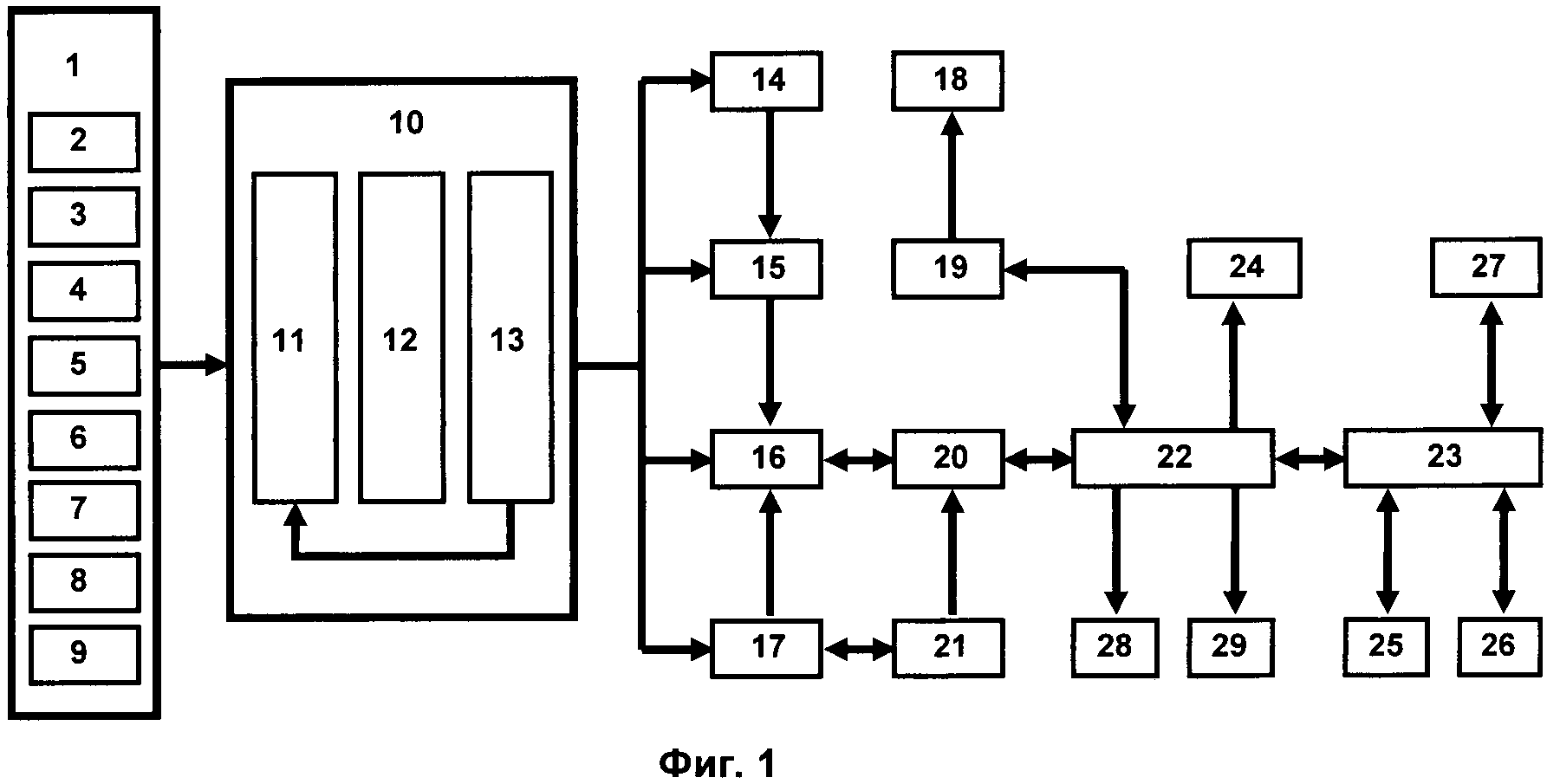
Схема содержит блок датчиков 1, блок 10 коммутации и предварительной обработки информации, первый 14 и второй 21 вычислительные блоки, первый 15 и второй 17 блоки сравнения, оперативное запоминающее устройство (ОЗУ) 16, интерфейс 20, ЭВМ 22, ИС 23, блок конкуренции 25, блок модели выбора и реализации решений 26, блок адаптации 27, формирователь сигналов 19, сигнализатор 18, дисплей 24, накопитель на магнитном диске 28 и принтер 29.
Блок датчиков 1 включает измерители угловых перемещений и скоростей при бортовой 2, килевой 3 и вертикальной 4 качке, чувствительные оси которых расположены вдоль продольной, поперечной и вертикальной центральных осей судна, датчики скорости 5 и направления 6 ветра, датчик параметров волнения 7 и 8 (волнограф), датчик курсового угла волны 9.
Блок 10 коммутации и предварительной обработки информации содержит коммутатор 11, аналого-цифровой преобразователь (АЦП) 12 и фильтр высоких частот 13.
Блоки 14, 15, 17, 21 осуществляют операции обработки измерительной информации и выбора условий безопасной посадки ЛА и реализуются в первом 14 и втором 21 вычислительных блоках, первом 15 и втором 17 блоках сравнения. Оперативное запоминающее устройство (ОЗУ) 16 получает данные от блоков 15 и 17 и взаимосвязанных с блоком интерфейса 20. Бортовая ЭВМ 22 соединена с блоком интерфейса 20 и ИС 23, управляющей работой бортового вычислительного комплекса на основе блоков конкуренции 25 и блоком модели выбора и реализации решений 26. Результаты функционирования вычислительного комплекса передаются на формирователь сигналов 19 и сигнализатор пилоту 18, выводятся на дисплей 24, документируются в накопителе на магнитном диске 28 и выводятся на печать с помощью принтера 29.
Блок интерфейса 20 осуществляет взаимодействие вычислительных блоков 14, 15, 17, 21 с ОЗУ 16, бортовой ЭВМ 22 и ИС 23, взаимосвязанных с блоком конкуренции 25 и блоком модели выбора и реализации решения 26, формирователем сигналов 19 и сигнализатором пилоту 18 о начале проведения взлетно-посадочных операций.
Блок ИС 23 (фиг. 2) обеспечивает функционирование программного комплекса управления посадкой ЛА на основе быстродействующей бортовой ЭВМ 22, динамической базы знаний 30, механизма логического вывода 31, системы объяснений 32 и базы данных 33.
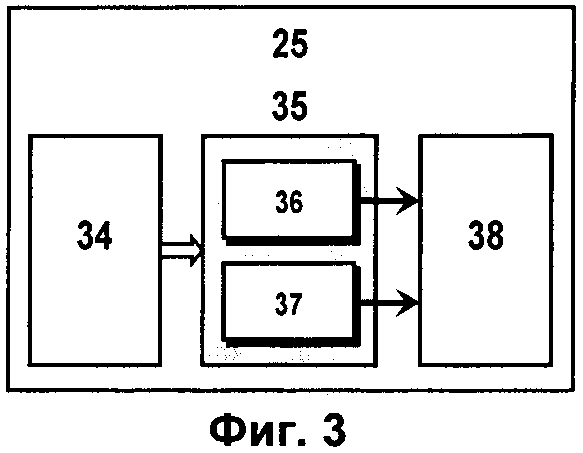
Блок 25 (фиг. 3) реализует принцип конкуренции, позволяющий на основе потока выходных данных 2-9, полученных от блока датчиков 1 измерительной системы, осуществлять оценку текущей ситуации 34 в зависимости от особенностей ветроволновых воздействий и ориентации судна относительно генерального направления бега волн. Реализация конкурирующих вычислительных технологий осуществляется в блоке 35 путем сопоставления решений на основе стандартного алгоритма 36 и нейронечеткой модели 37. Анализ альтернатив 38 позволяет выбирать предпочтительную вычислительную технологию интерпретации решения в процессе контроля динамики судна и ЛА.
Блок 26 модели выбора и реализации решений (фиг. 4) осуществляет контроль результатов работы блока 25 принципа конкуренции. Процедуры выбора и реализации решений обеспечиваются ИС с помощью логического вывода на основе принципа адаптивного резонанса, реализуемого блоком адаптации 27. Динамическая модель знаний, использующая этот принцип, ориентирована на подстройку логических моделей базы знаний ИС 23 и формализацию информации в условиях значительных ветроволновых воздействий. В процессе логического вывода осуществляется проверка соответствия исходных данных формализованной системе знаний и последующая корректировка логических правил ИС, связанная с модификацией имеющихся правил, либо построением новых правил, соответствующих исходным данным.
Модель выбора решений реализуется на основе функции выбора для управляющих и вычислительных алгоритмов системы морской посадки ЛА в виде экспоненциальной функции:

где KA - коэффициент, учитывающий особенности алгоритма решения; KT - коэффициент, учитывающий время выполнения алгоритма, αDS - функция, определяемая исходными параметрами задачи, параметрами алгоритма обработки информации и средствами его реализации; при заданном интервале реализации «окна безопасной посадки» предпочтительное решение определяется условием max(βDS) для конкурирующих алгоритмов, а KAKT=1.
На основании модели выбора осуществляется решение задачи прогноза «окна безопасной посадки» ЛА в морских условиях. Анализ ведется на основе вероятностной интерпретации динамики взаимодействия судна с внешней средой. Для случайных колебаний судна и скорости ветра возможность безопасной посадки определяется вероятностью:

где θ, ψ, ζ - угловые (бортовые и килевые) и вертикальные перемещения; звездочкой θ*, ψ*, ζ* помечены их предельные значения; V - модуль скорости ветра.
Предельный уровень вероятности р0 при заданных ограничениях ζ*, θ*, ψ*, (θ*)′, (ψ*)′, (ζ*)′ определяет условия допустимой посадки ЛА. При выполнении неравенства р<р0 посадка разрешается и начинает функционировать алгоритм поиска «окна безопасной посадки».
Блок 36, реализующий стандартный алгоритм контроля посадки ЛА, основан на процедуре фильтра Калмана, представляющей собой рекурсивный линейный оптимальный алгоритм обработки измерительной информации в режиме реального времени для оценки вектора состояния динамической системы при воздействии внешних возмущений. Стандартный алгоритм фильтра Калмана ориентирован на оценку параметров линейных систем. В случае нелинейной системы необходима предварительная линеаризация. Функционирование фильтра Калмана обеспечивается за счет использования данных измерений о состоянии судна и внешней среды.
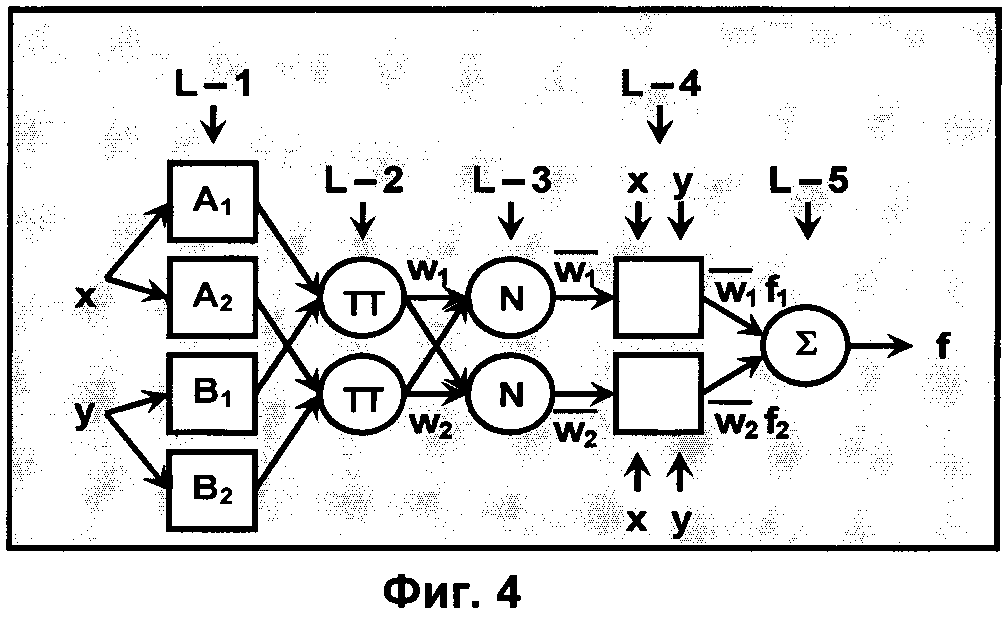
Блок 37, реализующий нейронечеткую модель управления посадкой ЛА, представлен на фиг. 4. Параметрический синтез модели осуществляется на стадии обучения, а корректировка синоптических связей - в процессе проведения операции посадки на основе данных измерений параметров качки судна и механизма логического вывода в бортовой ИС, функционирующей в режиме реального времени на основе теории нечетких множеств.
Система нечеткого вывода при управлении посадкой ЛА представлена в виде многослойной нейронечеткой сети прямого распространения (фиг. 4).
- Первый слой L - 1 обеспечивает фаззификацию входных сигналов и содержит функции принадлежности (ФП) для каждого входного сигнала: A1 и А2 для X, B1 и В2 для Y.
- Второй слой L - 2 осуществляет умножение входных параметров с целью реализации операции:

- Третий слой L - 3 вычисляет отношение веса заданного правила к сумме весов всех правил

- В четвертом слое L - 4 вычисляются выходы для каждого правила

Здесь p1, q1, r1 - параметры, определяющие структуру модели логического вывода по Сугено.
- Пятый слой L - 5 вычисляет общий выход нейронечеткой системы как сумму сигналов.
В приведенной нейронечеткой сети (фиг. 4) узлы, обозначенные кружочками, являются фиксированными, а узлы в виде квадратиков - адаптируемыми, т.е. их параметры могут настраиваться в зависимости от динамики судна и внешней среды. Функции нейронечеткой системы изменяются от узла к узлу и зависят от текущей ситуации и решаемой задачи. Наиболее сложную функцию реализует адаптивный узел с параметрами, изменяющимися в процессе обучения. Более простая функция характерна для постоянных узлов, параметры которых сохраняются неизменными в процессе обучения. Нейроны первого слоя содержат ФП, которые отражают степень соответствия, с которой входные параметры системы удовлетворяют лингвистическому значению, соответствующему данному узлу.
Таким образом, природа функций нейронечеткой сети изменяется от узла к узлу и зависит от текущей ситуации и решаемой задачи. Наиболее сложную функцию реализуют адаптивные узлы с параметрами, изменяющимися в процессе обучения. Более простая функция характерна для постоянных узлов, параметры которых сохраняются неизменными в процессе обучения. Нейронечеткие системы являются мощным инструментом решения различных задач анализа и интерпретации информации в бортовых ИС новых поколений. Архитектура таких систем отвечает жестким требованиям, предъявляемым к надежности контроля текущих ситуаций в режиме реального времени. Важнейшим фактором, определяющим качество работы нейронечеткой системы, является динамическая база знаний, формализация которой достигается с помощью методов нечеткой логики, а нейронная сеть представляет собойуниверсальный аппроксиматор текущих ситуаций в условиях неопределенности и неполноты исходной информации.
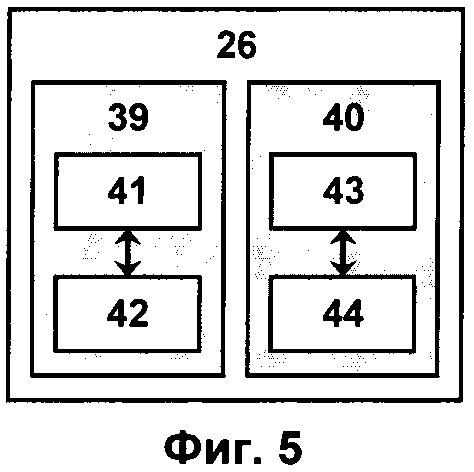
Блок 27 (фиг. 5) отображает структуру адаптивного модуля, организованного на основе принципа адаптивного резонанса и позволяющего формировать реакцию динамической базы знаний ИС для стандартных 39 и нестандартных 40 ситуаций, причем для стандартных ситуаций (стабильное решение 39) осуществляется модификация логической системы 41, 42, а для нестандартных (пластичное решение 40) - формируется новая ситуация 43 и реализуется логический вывод 44.
Таким образом, программный комплекс для генерации и моделирования ситуаций посадки ЛА в морских условиях реализуется на основе бортовой ИС в соответствии с разработанной концепцией конкуренции и представляет собой систему распределенного интеллекта. Комплекс включает ряд взаимодействующих между собой интеллектуальных модулей, выполняющих заданные функции в соответствии с общей стратегией функционирования. Помимо традиционных для систем интеллектуальной поддержки пилота и инженера посадки используются модули анализа и прогноза текущей ситуации в рамках принципа конкуренции и организации интерфейса взаимодействующих блоков. В процессе функционирования комплекса каждая из подсистем работает в соответствии с принятой общей коллективной стратегией, определяющей особенности рассматриваемых ситуаций морской посадки при значительных ветроволновых воздействиях и заданном пространстве параметров на основе разработанной вычислительной технологии высокопроизводительной обработки информации.
Способ реализуется следующим образом.
С помощью датчиков 2-9 на участке регистрации продолжительностью 15-20 мин измеряют скорость V(t) и направление ветра φv, параметры волнения: среднюю длину λW и высоту волны hW 3%-обеспеченности, курсовой угол волны φW, ординаты угловых перемещений θi(t), ψi(t), ζi(t) и скоростей θi′(t), ψi′(t), ζi′(t) при бортовой, килевой и вертикальной качке в заданных погодных условиях.
По результатам измерений устанавливают:
- состояние внешней среды V(t), φV, λW, hW и курсовой угол волны φW;
- динамику судна с характеристиками перемещений и скоростей при бортовой, килевой и вертикальной качке θi(t), ψi(t), ζi(t), θi′(t), ψi′(t), ζi′(t);
- «окно безопасной посадки» с соответствующим временным интервалом.
Коммутация, преобразование и сглаживание поступающих с датчиков сигналов реализуются в блоке 10.
Результаты предварительной обработки информации в режиме реального времени в виде дискретных сигналов θi(t), ψi(t), ζi(t), θi′(t), ψi′(t), ζi′(t) заносят в ОЗУ 16 и подают на вычислительные блоки 14 и 21 и блоки сравнения 15 и 17, где реализуются процедуры определения области незначительной качки, «окна безопасной посадки» и интервала времени проведения взлетно-посадочных операций.
Информация о моменте времени, полученная в ЭВМ 22, поступает в формирователь сигналов 19, где синтезируется сигнал для предупреждения пилота о возможности посадки ЛА в заданных погодных условиях.
Результаты прогнозирования качки судна выводят на дисплей 24, передают в сигнализатор 18 и документируют с помощью принтера 29.
Использование параллельной обработки информации в блоках 14-27 позволяет организовать вычислительный процесс по анализу результатов измерений в режиме реального времени.
Функциональная схема, реализующая способ прогнозирования качки судна, работает следующим образом.
Данные измерений с блока датчиков 1 через блок 10 коммутации и предварительной обработки информации поступают параллельно на первый вычислительный блок 14, первый блок 15 сравнения, ОЗУ 16 и второй блок 17 сравнения. Первый вычислительный блок 14 осуществляет выделение огибающей и передает ее ординаты в первый блок 15 сравнения, где проверяют условия ее реализации. Результат сравнения записывают в ОЗУ 15. Второй блок сравнения 17 проверяет условие безопасной посадки и заносит результаты в ОЗУ 16 и второй вычислительный блок 21, где производят статистический анализ данных о продолжительности области незначительной качки. Результаты обработки данных в блоках 14-21 поступают в ЭВМ 22, которая осуществляет контроль момента посадки ЛА по заданным условиям посадки и выдает данные прогнозирования на формирователь 19 сигналов и далее на сигнализатор 18, а кроме того, на дисплей 24, накопитель 28 на магнитном диске и принтер 29.
В процессе проведения взлетно-посадочных операций обработка информации производится на основе ИС 23, которая осуществляет контроль динамики посадки на основе принципа конкуренции с помощью стандартного 36 и нейронечеткого 37 алгоритмов. После выполнения вычислительных операций в блоках 36, 37 и выбора предпочтительной модели управления полетом 38 результаты контроля поступают в формирователь сигналов 19 и на дисплей 24для принятия решения инженером посадки, сигнализации пилоту 18, записываются на магнитном диске 28 и документируются 29.
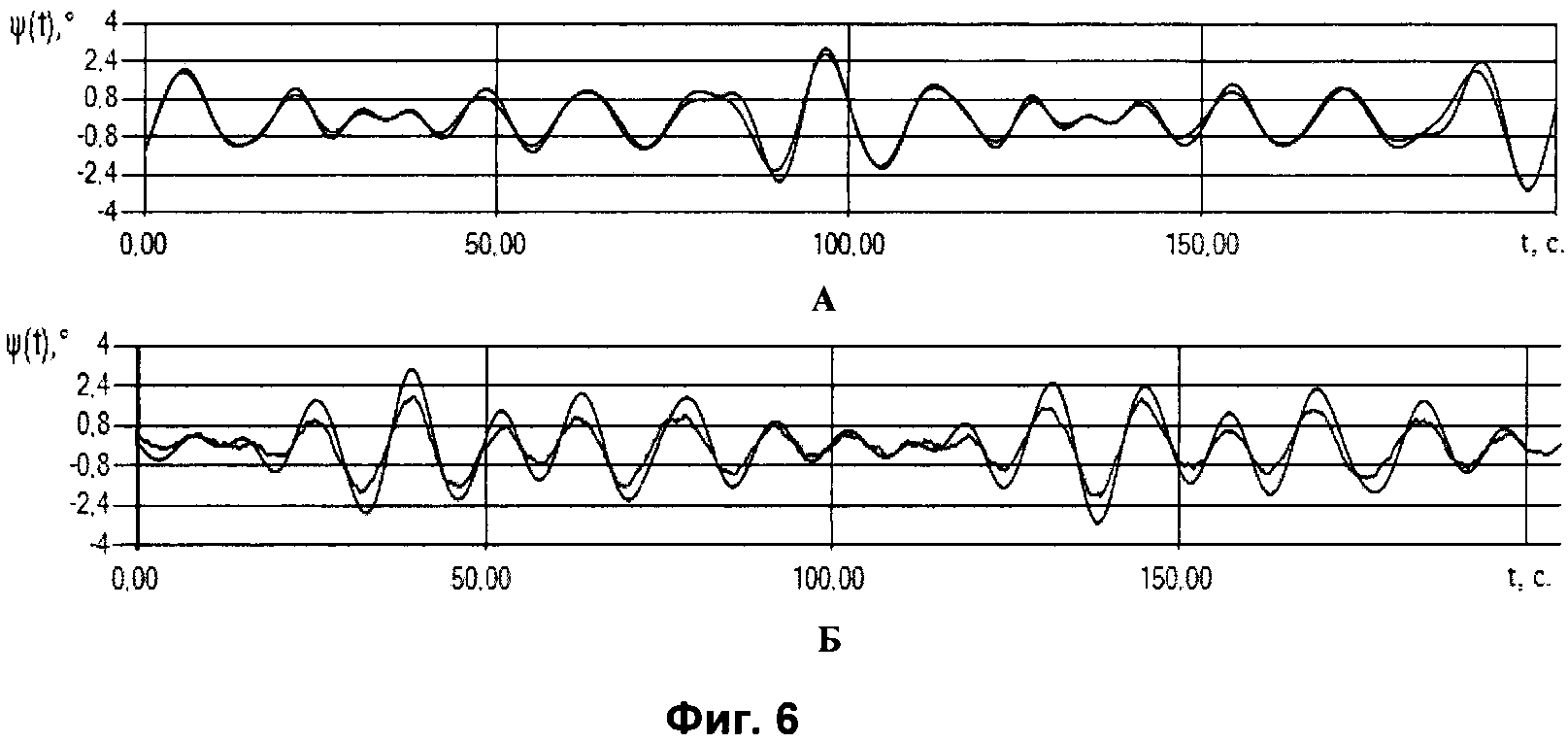
Пример реализации принципа конкуренции при контроле посадки ЛА в морских условиях при значительных ветроволновых воздействиях иллюстрирует фиг. 6. Здесь представлены сравнительные данные моделирования на основе нейронечеткой модели и фильтра Калмана. На первом из этих графиков (фиг. 6А) показаны реализации килевой качки на 7-балльном волнении, полученные с помощью нейронечеткой модели, а на втором (фиг. 6Б) - на основе фильтра Калмана. Из этих данных следует, что при достаточно интенсивном внешнем воздействии нейронечеткая система обеспечивает более достоверный прогноз динамики судна при килевой качке.
Одной из важных проблем при проведении операции посадки ЛА в морских условиях является оценка «окна безопасной посадки». Алгоритм такой оценки реализуется на основе принципа конкуренции.
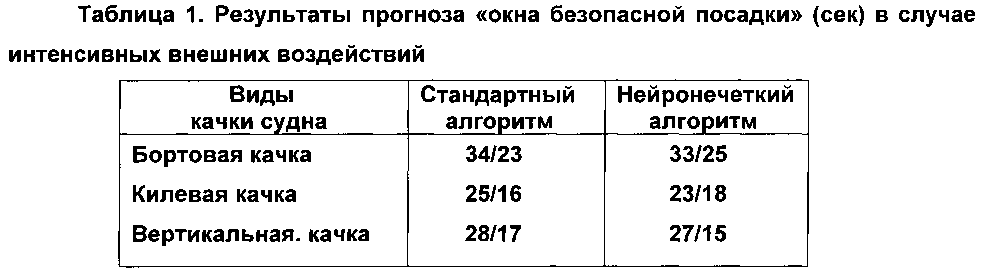
Сравнительные данные моделирования интервала «окна безопасной посадки» (сек) на основе рассмотренного стандартного и нейронечеткого алгоритма приведены в табл. 1. Здесь данные в числителе относятся к интенсивности волнения 7 баллов, а в знаменателе - 8 баллов.
В табл. 2 приведены выборочные данные момента времени подачи сигнала к посадке внутри «окна безопасной посадки» для интенсивности волнения 7 баллов.
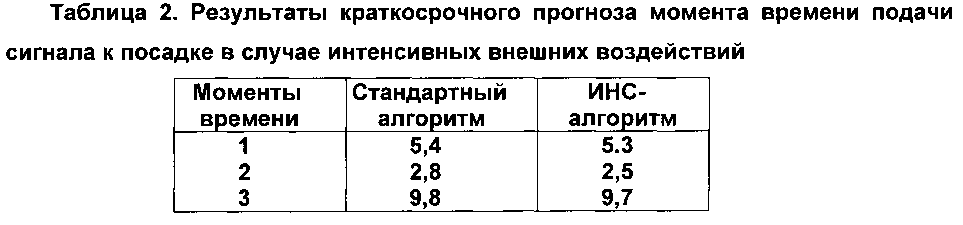
Из табл. 1 и 2 видно, что прогноз, реализуемый нейронечеткой моделью, во всех случаях дает менее «оптимистичные» результаты по сравнению с даннымистандартного алгоритма. Эти данные свидетельствуют о том, что концепция «окна безопасной посадки» особенно актуальна при интенсивных колебаниях судна, вызванных значительными внешними воздействиями в экстремальных ситуациях.
Таким образом, в результате использования предлагаемого изобретения на базе интеллектуальной технологии и высокопроизводительных средств обработки информации формируется гибкое информационное пространство контроля динамики судна и ЛА, включающее методы моделирования, основанные на реализации принципа конкуренции с использованием стандартной и нейронечеткой моделей и данных динамических измерений, настраиваемые адаптивные циклы реализации с учетом особенностей текущей ситуации, формализуемой на основе методов и моделей анализа и прогноза динамики взлетно-посадочных операций в заданных погодных условиях.
Способ прогнозирования качки судна при посадке летательных аппаратов в морских условиях, включающий измерение текущих угловых перемещений палубы судна и формирование на основании предыдущих и последующих перемещений методами экстраполяции модели качки и измерении величин скоростей перемещений при бортовой и килевой качке, сравнении величин перемещений и скоростей перемещений с предельно допустимыми значениями амплитуд бортовой и килевой качки, заданными из условия безопасной посадки, определении по результатам сравнения области незначительной качки, корректировке спрогнозированной модели и сигнализации летчику о моментах начала и завершения взлетно-посадочных операций в заданных погодных условиях, отличающийся тем, что при контроле «окна безопасной посадки» в условиях значительных ветроволновых воздействиях используют принцип конкуренции, позволяющий определять предпочтительную вычислительную технологию на основе стандартной модели, построенной с использованием фильтра Калмана и адаптивной нейронечеткой модели в виде нейронной сети прямого распространения, выполняют анализ альтернатив с помощью функции выбора и на основе выделенной вычислительной технологии осуществляют моделирование динамики взаимодействия судна с внешней средой, результаты которого используют при проведении контроля взлетно-посадочных операций в заданных погодных условиях.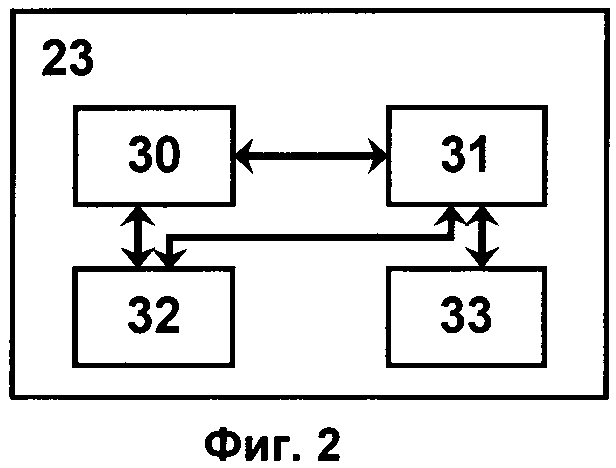
Способ автоматизированного управления проектированием бортовых интеллектуальных систем
Способ контроля непотопляемости судна
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент грид-системы
Способ контроля экстремальных ситуаций в условиях неопределенности среды
Способ проектирования многорежимной интеллектуальной системы управления распределенной средой мягких вычислений
Способ оперативного контроля остойчивости судна в чрезвычайных ситуациях
Способ предупреждения столкновения морских судов
Способ эволюционного моделирования эпидемической динамики вич-инфекции
Способ автоматизированного управления проектированием бортовых интеллектуальных систем
Способ контроля непотопляемости судна
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент грид-системы
Способ контроля экстремальных ситуаций в условиях неопределенности среды
Способ проектирования многорежимной интеллектуальной системы управления распределенной средой мягких вычислений
Способ оперативного контроля остойчивости судна в чрезвычайных ситуациях
Способ контроля остойчивости судна в условиях экстремального волнения
Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф
Способ предупреждения столкновения морских судов
Способ эволюционного моделирования эпидемической динамики вич-инфекции

