Результат интеллектуальной деятельности: Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой
Вид РИД
Изобретение
Предлагаемая группа изобретений относится к средствам измерения для широкого класса самолетов, вертолетов, беспилотных летательных аппаратов и в частности для маневренных самолетов и может быть использована при формировании оценки абсолютной высоты полета летательных аппаратов.
Значительное число авиационных происшествий с исправными воздушными судами различного назначения связано со столкновением с землей. Сложность предотвращения столкновения с землей обусловлена различными факторами: ошибками экипажа, погрешностями измерителей, разбросом характеристик летательного аппарата (ЛА). Особенно эта задача сложна для маневренных самолетов, осуществляющих полеты на малых высотах и больших скоростях.
Применительно к этим задачам при формировании оценки абсолютной высоты полета (относительно нулевого уровня ЦКИ - эллипсоида Красовского) критическими являются требования точности, надежности и отказоустойчивости во всем эксплуатационном диапазоне углов тангажа, крена, скорости полета.
Критичность этих требований обусловлена:
- низкой точностью барометрических измерителей, основным недостатком которых является наличие высокого уровня систематических погрешностей определения абсолютной барометрической высоты при отличии распределения атмосферы от стандартного;
- наличием систематической погрешности измерения высоты спутниковым каналом навигационной системы;
- узкой рабочей областью радиотехнических средств определения высоты, таких как спутниковые и радиовысотомеры;
- одноканальной системой определения высоты относительно подстилающей поверхности (один радиовысотомер);
- погрешностью определения текущих координат местоположения объекта (ТКМС), особенно в автономном режиме.
Предлагаемые средства измерения предназначены для повышения точности и надежности определения высоты полета ЛА, в том числе и над горным рельефом местности, расширения рабочей зоны и на этой основе повышения безопасности полета.
В описании используются следующие термины:
Термин «оценка» в теории управления - результат обработки (фильтрации) измерений с подавлением или компенсацией случайных погрешностей.
«Абсолютная высота» - высота относительно среднего уровня моря.
«Оценка абсолютной высоты» - параметр, который формируется на выходе фильтра (типа фильтра Калмана) путем комплексирования информации измерителей различного типа.
«Расчетное значение абсолютной высоты» - сумма высоты земной поверхности в точке фактического местоположения ЛА, определяемой навигационной системой, и «истинной» высоты ЛА (от ЛА до земной поверхности) измеряемой, например, радиовысотомером.
«Абсолютная барометрическая высота» - барометрическая высота относительно давления 760 мм.рт.ст., в стандартных условиях совпадает с давлением на уровне моря.
«Спутниковая высота» (полезная составляющая) - высота относительно земного эллипсоида, совпадает с высотой относительно среднего уровня моря.
Известна система формирования абсолютной высоты (Патент RU 2085851 С1), в которой формирование оценки абсолютной высоты полета осуществляется на основе комплексирования информации инерциальных, спутниковых датчиков, радиовысотомера и карты рельефа местности. В этой системе реализуется способ, при котором, определяют координаты текущего местоположения летательного аппарата с использованием навигационной системы, определяют текущую высоту рельефа местности с использованием средств для запоминания и обработки базы данных высот рельефа местности, измеряют высоту ЛА относительно земной поверхности, измеряют спутниковую высоту с использованием спутникового канала навигационной системы, вычисляют расчетное значение абсолютной высоты путем суммирования текущей высоты рельефа местности и высоты относительно земной поверхности, с использованием которого корректируют спутниковую высоту.
Недостатком этого устройства является узкий диапазон его работы (углы крена и тангажа менее 30 град.), обусловленный узкой рабочей областью радиотехнических средств определения высоты, таких как спутниковые и радиовысотомеры. Кроме того, отечественные технологии реализации навигационных систем и радиовысотомеров позволяют, с учетом массогабаритных и других характеристик этих систем, устанавливать на отечественные маневренные самолеты один радиовысотомер и двухканальную навигационную систему, что недостаточно, с позиций надежности и отказобезопасности систем формирования абсолютной высоты и систем предотвращения столкновения с рельефом местности. Вместе с тем уже существуют отечественные четырехканальные аэрометрические измерители высотноскоростных параметров полета, на основе использования которых могут быть достигнуты необходимые характеристики надежности и отказобезопасности отказоустойчивости систем формирования абсолютной высоты.
Известно устройство измерения высоты (Самолетные навигационные системы под ред. Поляка Ю.В.. Воениздат. 1973. с. 281.) в котором определение высоты осуществляется на основе комплексирования информации радиовысотомера и барометрического измерителя. Это устройство кроме отмеченного выше недостатка (узкий диапазон работы) может использоваться только над равнинной местностью.
Наиболее близкими являются способ и устройство формирования абсолютной высоты (Патент RU 2346242 С1). В этом устройстве реализуется способ, при котором, определяют текущие координаты местоположения летательного аппарата с использованием навигационной системы, определяют текущую высоту рельефа местности с использованием средств для запоминания и обработки базы данных высот рельефа местности и текущих координат местоположения летательного аппарата, измеряют абсолютную барометрическую высоту, измеряют высоту относительно земной поверхности, измеряют спутниковую высоту с использованием спутникового канала навигационной системы, вычисляют расчетное значение абсолютной высоты путем суммирования текущей высоты рельефа местности и высоты относительно земной поверхности, корректируют спутниковую высоту путем суммирования со спутниковой высотной поправкой, которую формируют с использованием расчетного значения абсолютной высоты, формируют оценку абсолютной высоты путем суммирования абсолютной барометрической высоты с величиной высотной поправки, которую вычисляют путем интегрирования промежуточного по уровню сигнала из взвешенной величины первого рассогласования между расчетным значением абсолютной высоты и ее оценкой, взвешенной величины второго рассогласования между скорректированной спутниковой высотой и оценкой абсолютной высоты, и нулевого сигнала.
Недостатком этого устройства является снижение точности формирования оценки абсолютной высоты из-за:
- погрешностей радиовысотомера, без снятия исправности, вблизи границы рабочей области;
- снижения точности определения ТКМС и, как следствие, расчетного значения абсолютной высоты, например, при перерывах спутниковой коррекции, при полете над горным/сильнопересеченным рельефом местности;
- наличия длительного начального переходного периода (1-2 минуты) до входа в рабочую (с заявленной погрешностью) область формирования абсолютной высоты.
В основу предлагаемого изобретения положено решение задачи формирования оценки абсолютной высоты полета ЛА с высокой точностью и надежностью во всем эксплуатационном диапазоне углов крена и тангажа ЛА и над всеми существующими рельефами местности, что позволяет повысить безопасность полета вблизи земли.
Особое значение предлагаемое изобретение имеет для маневренных самолетов, беспилотных летательных аппаратов, выполняющих полеты вблизи земли.
Технический результат достигается тем, что в способе формирования оценки абсолютной высоты, при котором определяют координаты текущего местоположения летательного аппарата с использованием навигационной системы, определяют текущую высоту рельефа местности с использованием средств для запоминания и обработки базы данных высот рельефа местности и координат текущего местоположения летательного аппарата, измеряют абсолютную барометрическую высоту, измеряют высоту относительно земной поверхности, измеряют спутниковую высоту с использованием спутникового канала навигационной системы, вычисляют расчетное значение абсолютной высоты путем суммирования текущей высоты рельефа местности и высоты относительно земной поверхности, корректируют спутниковую высоту путем ее суммирования со спутниковой высотной поправкой, которую вычисляют путем фильтрации рассогласования между расчетным значением абсолютной высоты и спутниковой высотой, формируют оценку абсолютной высоты путем суммирования абсолютной барометрической высоты с величиной высотной поправки, которую вычисляют путем интегрирования промежуточного по уровню сигнала из взвешенной величины первого рассогласования между расчетным значением абсолютной высоты и оценкой абсолютной высоты, взвешенной величины второго рассогласования между скорректированной спутниковой высотой и оценкой абсолютной высоты, и нулевого сигнала, согласно изобретению, вычисляют и запоминают в процессе взлета начальные значения спутниковой высотной поправки и высотной поправки с использованием датчика обжатия главных стоек шасси, определяют значения максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности с использованием средств для запоминания и обработки базы данных высот рельефа местности, с использованием которых формируют признак исправности высоты относительно земной поверхности и исправности средств для запоминания и обработки базы данных рельефа местности, определяют показатель пересеченности рельефа местности, определяют нормальное отклонение погрешности измерения текущих координат местоположения ЛА с использованием навигационной системы, и с их учетом формируют признак исправности расчетного значения абсолютной высоты, при отсутствии которого запоминают величину спутниковой высотной поправки, а величину высотной поправки формируют путем интегрирования взвешенной величины второго рассогласования.
Технический результат достигается также и тем, что признак исправности высоты относительно земной поверхности и исправности средств для запоминания и обработки базы данных высот рельефа местности, формируют при условии, что величина рассогласования между оценкой абсолютной высоты и высотой относительно земной поверхности не превышает величины максимальной высоты рельефа местности в зоне мониторинга рельефа местности и не менее величины минимальной высоты рельефа местности в зоне мониторинга рельефа местности.
Технический результат достигается также и тем, что границы временной базы данных высот рельефа местности вычисляют с использованием текущих координат местоположения летательного аппарата, измеренных навигационной системой, на основе которых и с использованием средств для запоминания и обработки базы данных высот рельефа местности запоминают временную базу данных высот рельефа местности в быстродействующем запоминающем устройстве, определяют во временной базе данных высот рельефа местности значения максимальной и минимальной высот рельефа местности, принимают их в качестве максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности и формируют с их учетом показатель пересеченности рельефа местности.
Технический результат достигается также и тем, что признак исправности расчетного значения абсолютной высоты формируют при наличии признака исправности высоты относительно земной поверхности и исправности средств для запоминания и обработки базы данных высот рельефа местности, и условии, что для пересеченного рельефа местности величина нормального отклонения погрешности измерения текущих координат местоположения ЛА не превышает порогового значения.
Технический результат достигается также и тем, что начальное значение спутниковой высотной поправки приравнивают к рассогласованию между расчетным значением абсолютной высоты и спутниковой высотой, а начальное значение высотной поправки приравнивают к рассогласованию между расчетным значением абсолютной высоты и абсолютной барометрической высотой.
Описанный способ формирования оценки абсолютной высоты полета летательного аппарата реализуется с помощью системы формирования оценки абсолютной высоты полета летательного аппарата, содержащей измеритель абсолютной барометрической высоты, радиовысотомер и вычислитель, соединенный с измерителем абсолютной барометрической высоты и радиовысотомером, навигационную систему со спутниковым каналом и средствами для запоминания и обработки базы данных высот рельефа местности, соединенные с вычислителем, при этом средства для запоминания и обработки базы данных высот рельефа местности выполнены с возможностью определения текущей высоты рельефа местности, вычислитель выполнен с возможностью вычисления расчетного значения абсолютной высоты путем суммирования текущей высоты рельефа местности и высоты радиовысотомера, коррекции спутниковой высоты путем ее суммирования со спутниковой высотной поправкой, которую вычисляют путем фильтрации рассогласования между расчетным значением абсолютной высоты и спутниковой высотой, формирования оценки абсолютной высоты путем суммирования абсолютной барометрической высоты с величиной высотной поправки, которую вычисляют путем интегрирования промежуточного по уровню сигнала из взвешенной величины первого рассогласования между расчетным значением абсолютной высоты и ее оценкой, взвешенной величины второго рассогласования между скорректированной спутниковой высотой и оценкой абсолютной высоты, и нулевого сигнала, согласно изобретению, в нее введен датчик обжатия главных стоек шасси, соединенный с вычислителем, навигационная система выполнена с возможностью определения нормального отклонения погрешности измерения текущих координат местоположения ЛА, средства для запоминания и обработки базы данных высот рельефа местности выполнены с возможностью определения максимальной и минимальной высот в зоне мониторинга рельефа местности, вычислитель выполнен с возможностью вычисления и запоминания задания начальных значений спутниковой высотной поправки и высотной поправки в процессе взлета с использованием сигнала датчика обжатия главных стоек шасси, формирования признака исправности высоты радиовысотомера и исправности средств для запоминания и обработки базы данных высот рельефа местности, показателя пересеченности рельефа местности, и формирования, с их учетом и с учетом величины нормального отклонения погрешности измерения текущих координат местоположения летательного аппарата, признака исправности расчетного значения абсолютной высоты, при отсутствии которого величина спутниковой высотной поправки запоминается, а величину высотной поправки формируют путем интегрирования взвешенной величины второго рассогласования.
Описанный способ формирования оценки абсолютной высоты полета летательного аппарата реализуется с помощью многофункционального маневренного самолета с системой формирования оценки абсолютной высоты полета летательного аппарата содержащего комплексную систему управления с системой измерения воздушно скоростных параметров, информационно управляющую систему с вычислительной системой, средствами индикации и сигнализации, комплекс пилотажно-навигационного оборудования с навигационными датчиками, радиовысотомером и средствами для запоминания и обработки базы данных высот рельефа местности, соединенные каналами информационного обмена, шасси с датчиками обжатия стоек шасси, рулевые привода аэродинамических поверхностей соединенные с комплексной системой управления, при этом, средства для запоминания и обработки базы данных рельефа местности и средства индикации и сигнализации соединены с вычислительной системой, средства для запоминания и обработки базы данных высот рельефа местности выполнены с возможностью определения текущей высоты рельефа местности, вычислительная система выполнена с возможностью вычисления расчетного значения абсолютной высоты путем суммирования текущей высоты рельефа местности и высоты радиовысотомера, коррекции спутниковой высоты путем ее суммирования со спутниковой высотной поправкой, которую вычисляют путем фильтрации рассогласования между расчетным значением абсолютной высоты и спутниковой высотой, формирования оценки абсолютной высоты путем суммирования абсолютной барометрической высоты с величиной высотной поправки, которую вычисляют путем интегрирования промежуточного по уровню сигнала из взвешенной величины первого рассогласования между расчетным значением абсолютной высоты и оценкой абсолютной высоты, взвешенной величины второго рассогласования между скорректированной спутниковой высотой и оценкой абсолютной высоты, и нулевого сигнала, вычислительная система также выполнена с возможностью вычисления потери высоты при включении автоматического увода летательного аппарата от земной поверхности, формирования с ее использованием высоты включения автоматического увода, и сигналов автоматического увода, а комплексная система управления выполнена с возможностью формирования сигналов для автоматического увода летательного аппарата от земной поверхности, согласно изобретению, комплексная система управления соединена с датчиками обжатия стоек шасси и выполнена с возможностью формирования признака обжатия главных стоек шасси, комплекс пилотажно-навигационного оборудования выполнен с возможностью определения нормального отклонения погрешности измерения текущих координат местоположения летательного аппарата, средства для запоминания и обработки базы данных высот рельефа местности выполнены с возможностью определения максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности, вычислительная система выполнена с возможностью вычисления и запоминания задания начальных значений спутниковой высотной поправки и высотной поправки в процессе взлета с использованием признака обжатия главных стоек шасси от комплексной системы управления, формирования признака исправности высоты радиовысотомера и исправности средств для запоминания и обработки базы данных высот рельефа местности, показателя пересеченности рельефа местности и формирования с их учетом и с учетом величины нормального отклонения погрешности измерения текущих координат местоположения ЛА, признака исправности расчетного значения абсолютной высоты, при отсутствии которого величина спутниковой высотной поправки запоминается, а величину высотной поправки формируют путем интегрирования взвешенной величины второго рассогласования, вычислительная система также выполнена с возможностью формирования сигнала для сигнализации экипажу и включения автоматического увода путем сравнения высоты включения автоматического увода и оценки абсолютной высоты.
Заявленное изобретение иллюстрируется приложенными графическими материалами на которых изображено:
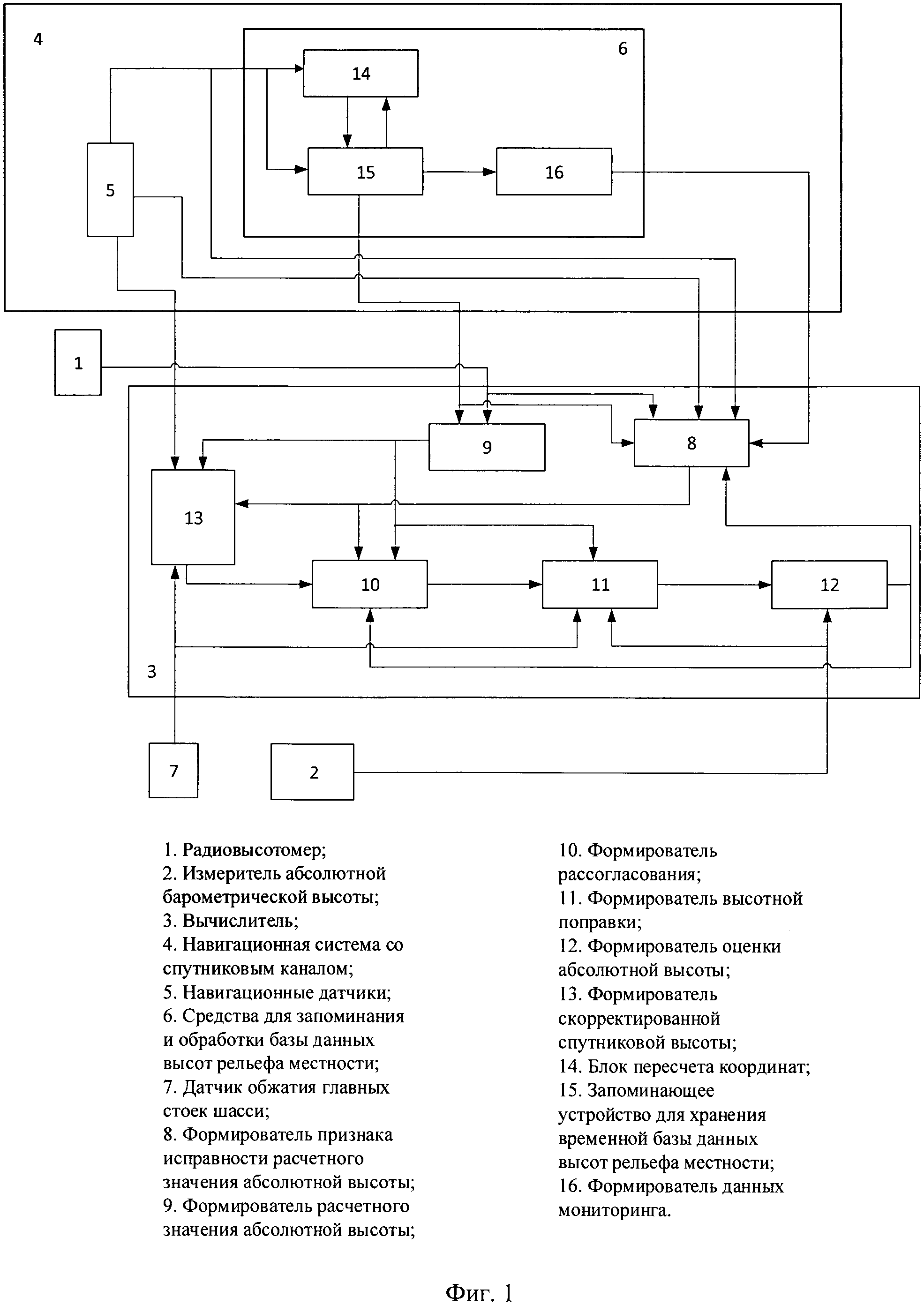
Фиг. 1 - Блок схема системы формирования оценки абсолютной высоты;
Фиг. 2 - Блок схема многофункционального самолета;
Фиг. 3 - Фрагмент процесса оценивания высоты, полученный при математическом моделировании устройства.
Согласно предложенному способу формирования оценки абсолютной высоты полета летательного аппарата, при котором определяют координаты текущего местоположения летательного аппарата с использованием навигационной системы, определяют текущую высоту рельефа местности с использованием средств для запоминания и обработки базы данных высот рельефа местности и координат текущего местоположения летательного аппарата, измеряют абсолютную барометрическую высоту, измеряют высоту относительно земной поверхности, измеряют спутниковую высоту с использованием спутникового канала навигационной системы, вычисляют расчетное значение абсолютной высоты путем суммирования текущей высоты рельефа местности и высоты относительно земной поверхности, корректируют спутниковую высоту путем ее суммирования со спутниковой высотной поправкой, которую вычисляют путем фильтрации рассогласования между расчетным значением абсолютной высоты и спутниковой высотой, формируют оценку абсолютной высоты путем суммирования абсолютной барометрической высоты с величиной высотной поправки, которую вычисляют путем интегрирования промежуточного по уровню сигнала из взвешенной величины первого рассогласования между расчетным значением абсолютной высоты и оценкой абсолютной высоты, взвешенной величины второго рассогласования между скорректированной спутниковой высотой и оценкой абсолютной высоты, и нулевого сигнала, вычисляют и запоминают задают в процессе взлета начальные значения спутниковой высотной поправки и высотной поправки с использованием датчика обжатия главных стоек шасси, определяют значения максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности с использованием средств для запоминания и обработки базы данных высот рельефа местности, с использованием которых формируют признак исправности высоты относительно земной поверхности и исправности средств для запоминания и обработки базы данных высот рельефа местности, определяют показатель пересеченности рельефа местности, определяют нормальное отклонение погрешности измерения текущих координат местоположения ЛА с использованием навигационной системы, и с их учетом формируют признак исправности расчетного значения абсолютной высоты, при отсутствии которого запоминают величину спутниковой высотной поправки, а величину высотной поправки формируют путем интегрирования взвешенной величины второго рассогласования.
Признак исправности высоты относительно земной поверхности и исправности средств для запоминания и обработки базы данных высот рельефа местности формируют при условии, что величина рассогласования между оценкой абсолютной высоты и высотой относительно земной поверхности не превышает величины максимальной высоты рельефа местности в зоне мониторинга рельефа местности и не менее величины минимальной высоты рельефа местности в зоне мониторинга рельефа местности.
Границы временной базы данных высот рельефа местности вычисляют с использованием текущих координат местоположения летательного аппарата, измеренных навигационной системой, на основе которых и с использованием средств для запоминания и обработки базы данных высот рельефа местности запоминают временную базу данных высот рельефа местности в быстродействующем запоминающем устройстве, определяют во временной базе данных высот рельефа местности значения максимальной и минимальной высот рельефа местности, принимают их в качестве максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности и формируют с их учетом показатель пересеченности рельефа местности.
Признак исправности расчетного значения абсолютной высоты формируют при наличии признака исправности высоты относительно земной поверхности и исправности средств для запоминания и обработки базы данных высот рельефа местности и условии, что для пересеченного рельефа местности величина нормального отклонения погрешности измерения текущих координат местоположения ЛА не превышает порогового значения.
Начальное значение спутниковой высотной поправки приравнивают к рассогласованию между расчетным значением абсолютной высоты и спутниковой высотой, а начальное значение высотной поправки приравнивают к рассогласованию между расчетным значением абсолютной высоты и абсолютной барометрической высотой.
Система формирования оценки абсолютной высоты полета летательного аппарата содержит (см. фиг. 1) радиовысотомер 1, измеритель абсолютной барометрической высоты 2, вычислитель 3, навигационную систему 4 со спутниковым каналом, с навигационными датчиками 5 и средствами для запоминания и обработки базы данных высот рельефа местности 6, датчик обжатия главных стоек шасси 7.
Выход радиовысотомера 1 и выход измерителя абсолютной барометрической высоты 2 соединены с первым и вторым входами вычислителя 3 соответственно. Первый выход блока навигационных датчиков 5 соединен с третьим входом вычислителя 3, второй выход - с первым входом средств для запоминания и обработки базы данных высот рельефа местности 6, третий выход - с четвертым входом вычислителя 3. Первый выход средств для запоминания и обработки базы данных высот рельефа местности 6 соединен с пятым входом вычислителя 3, второй выход - с шестым входом вычислителя 3, выход которого является выходом устройства. Первый и третий выходы блока навигационных датчиков 5 являются соответствующими выходами навигационной системы 4. Первый и второй выходы средств для запоминания и обработки базы данных высот рельефа местности 6 являются вторым и четвертым выходами навигационной системы 4. Второй выход блока навигационных датчиков 5 является пятым выходом навигационной системы 4, он соединен с седьмым входом вычислителя 3. Датчик обжатия главных стоек шасси 7 соединен с восьмым входом вычислителя 3.
Вычислитель 3 содержит (см. фиг. 1) формирователь признака исправности расчетного значения абсолютной высоты 8, последовательно соединенные формирователь расчетного значения абсолютной высоты 9, формирователь рассогласования 10, формирователь высотной поправки 11 и формирователь оценки абсолютной высоты 12, и формирователь скорректированной спутниковой высоты 13. При этом выход формирователя расчетного значения абсолютной высоты 9 соединен с первым входом формирователя скорректированной спутниковой высоты 13. Выход формирователя признака исправности расчетного значения абсолютной высоты 8 соединен со вторыми входами формирователя рассогласования 10 и формирователя скорректированной спутниковой высоты 13. Выход формирователя оценки абсолютной высоты 12 является выходом вычислителя 3 и выходом устройства.
Первый вход формирователя 8 соединен с выходом радиовысотомера 1. Второй вход формирователя признака исправности расчетного значения абсолютной высоты 8 является четвертым входом вычислителя 3, он соединен с третьим выходом навигационной системы 4. Третий вход формирователя признака исправности расчетного значения абсолютной высоты 8 является седьмым входом вычислителя 3, он соединен с пятым выходом навигационной системы 4. Четвертый вход формирователя признака исправности расчетного значения абсолютной высоты 8 соединен с пятым входом вычислителя 3, пятый вход - с шестым входом вычислителя 3, а шестой вход - с выходом формирователя оценки абсолютной высоты 12. Первый вход формирователя 9 является первым входом вычислителя 3, он соединен с выходом радиовысотомера 1. Второй вход формирователя расчетного значения абсолютной высоты 9 является пятым входом вычислителя 3, он соединен с первым выходом средств для запоминания и обработки данных рельефа местности 6. Третий вход формирователя рассогласования 10 соединен с выходом формирователя оценки абсолютной высоты 12. Четвертый вход формирователя рассогласования 10 соединен с выходом формирователя скорректированной спутниковой высоты 13, третий вход которого является третьим входом вычислителя 3, он соединен с первым выходом навигационной системы 4. Второй вход формирователя высотной поправки 11 и четвертый вход формирователя скорректированной спутниковой высоты 13 соединены с датчиком обжатия главных стоек шасси 7. Третий вход формирователя высотной поправки 11 соединен с выходом формирователя расчетного значения абсолютной высоты 9, четвертый вход - с выходом измерителя абсолютной барометрической высоты 2.
Средства для запоминания и обработки базы данных высот рельефа местности 6 содержат последовательно соединенные блок пересчета координат 14, запоминающее устройство для хранения временной базы данных высот рельефа местности 15 и формирователь данных мониторинга 16. Первый вход блока пересчета координат 14 является первым входом средств для запоминания и обработки базы данных высот рельефа местности 6, он соединен со вторым выходом блока навигационных датчиков 5. Второй вход запоминающего устройства для хранения временной базы данных высот рельефа местности 15 подключается к внешнему средству управления вводом данных (на схеме не показано). Третий вход запоминающего устройства для хранения временной базы данных высот рельефа местности 15 соединен со вторым выходом блока навигационных датчиков 5. Второй выход запоминающего устройства для хранения временной базы данных высот рельефа местности 15 является первым выходом средств для запоминания и обработки данных рельефа местности 6, третий выход запоминающего устройства для хранения временной базы данных высот рельефа местности 15 соединен со вторым входом блока пересчета координат 14.
Возможность осуществления изобретения иллюстрируется на примере устройства определения высоты полета ЛА для системы предотвращения столкновения с рельефом местности маневренного самолета. Этот пример не должен рассматриваться ни как ограничивающий объем изобретения, ни как предпочтительная для всех случаев форма его реализации.
В блоке пересчета координат 14 осуществляется пересчет координат местоположения Л А со второго выхода навигационных датчиков 5, из земной системы координат (ЗСК) в систему координат цифровой карты местности (СКЦКМ) с использованием земных координат начала отсчета СКЦКМ, которые поступают в блок пересчета координат 14 из запоминающего устройства для хранения временной базы данных высот рельефа местности 15, где они хранятся.
Система координат цифровой карты местности (СК ЦКМ) - плоская система координат ориентированная перпендикулярно местной нормали к поверхности геоида в точке начала координат, ось хк направлена на Север, ось zк направлена на Восток. Значения координат точки в СК ЦКМ меняются дискретно и соответствуют номеру элемента массива.
В запоминающем устройстве для хранения временной базы данных высот рельефа местности 15 хранится временная база данных высот рельефа местности (значения высоты рельефа местности в узлах сетки, шаг которой может составлять, например, 100 м). В плане временная база данных высот рельефа местности представляет собой зону, центром которой является точка с координатами текущего местоположения ЛА, измеренными навигационной системой. Например, квадрат со стороной равной удвоенному значению ожидаемой максимальной ошибки счисления координат, которая поступает в запоминающее устройство для хранения временной базы данных высот рельефа местности 15 со второго выхода навигационных датчиков 5. Временная база данных высот рельефа местности обновляется (например, с частотой 10 гц) по сигналам от внешнего средства управления вводом данных (на схеме не показано). При поступлении на вход запоминающего устройства для хранения временной базы данных высот рельефа местности 15 с блока пересчета координат 14 координат текущего местоположения ЛА, на его второй выход поступает высота рельефа местности в узле сетки карты, ближайшем к текущему местоположению ЛА, измеренному навигационной системой. В формирователе данных мониторинга 16 осуществляется выбор максимальной и минимальной величин из значений высоты рельефа местности в узлах сетки, хранящихся в запоминающем устройстве для хранения временной базы данных высот рельефа местности 15.
В формирователе признака исправности расчетного значения абсолютной высоты 8 формируется признак исправности расчетного значения абсолютной высоты.
U8=1 при:
- наличии признака исправности в сигнале с радиовысотомера 1;
- значения абсолютных величин углов крена или тангажа (с третьего выхода навигационной системы 4) менее порогового значения (30 град);
- наличии признака исправности радиовысотомера и исправности средств для запоминания и обработки базы данных высот рельефа местности;
- величине нормального отклонения погрешности измерения текущих координат местоположения ЛА (с пятого выхода навигационной системы 4) меньшей первого порогового значения при величине показателя пересеченности рельефа местности большей второго порогового значения (σr<.σ0 И Pr>Р0).
где Pr=Kr*(Yrmax-Yrmin);
Pr- показатель пересеченности рельефа, Kr - const.
Признак исправности радиовысотомера и средств для запоминания и обработки базы данных высот рельефа местности формируется по условию: Yrmin≤He- Нрв≤Yrmax
где Не - оценка абсолютной высоты с формирователя оценки абсолютной высоты 12;
Yr- текущая высота рельефа местности со второго выхода запоминающего устройства для хранения временной базы данных высот рельефа местности 15;
Нрв - высота с радиовысотомера 1;
Yrmax, Yrmin - максимальная, минимальная высота в зоне мониторинга с формирователя данных мониторинга 16;
σr - величина нормального отклонения погрешности измерения ТКМС;
ТКМС - текущие координаты местоположения самолета;
σ0 - первое пороговое значение, например, 100 м;
Р0 - второе пороговое значение, например с уклонами 5 градусов
В блоке 9 вычисляется расчетное значение абсолютной (относительно геоида) высоты полета ЛА по измерениям радиовысотомера 1 и рельефа местности (текущая высота) с запоминающего устройства для хранения временной базы данных высот рельефа местности 15:

где Нрв- выходной сигнал радиовысотомера 1;
Yr- текущая высота рельефа с запоминающего устройства для хранения временной базы данных высот рельефа местности 15.
В формирователе скорректированной спутниковой высоты 13 формируется скорректированная спутниковая высота путем суммирования высоты, измеренной спутниковым каналом навигационной системы, с первого выхода навигационной системы 4, со спутниковой высотной поправкой, которая вычисляется путем фильтрации (апериодический фильтр) рассогласования между расчетным значением абсолютной высоты с формирователя расчетного значения абсолютной высоты 9 и спутниковой высотой с первого выхода навигационной системы 4.

где: Т12-постоянная времени фильтра (30 сек);
 - спутниковая высотная поправка;
- спутниковая высотная поправка;
 - спутниковая высота.
- спутниковая высота.
Учитывая, что расчетное значение абсолютной высоты и сигнал спутникового измерителя содержат полезный сигнал и погрешность получим:

где: δhрн - погрешность определения расчетного значения абсолютной высоты, обусловленная погрешностью радиовысотомера (РВ) и ошибкой счисления текущих координат местоположения самолета (ТКМС),
δhc - погрешность измерения спутниковой высоты.
Учитывая, что постоянная времени апериодического фильтра выбирается из условия выделения медленно меняющейся (систематической) погрешности спутниковой высоты и подавления случайных погрешностей, получаем, что на выходе интегратора (апериодического фильтра) выделяется указанная систематическая погрешность, т.е.  где δhcc - систематическая погрешность спутниковой высоты и
где δhcc - систематическая погрешность спутниковой высоты и 
То есть в выходном сигнале формирователя скорректированной спутниковой высоты 13 систематическая погрешность спутниковой высоты компенсирована.
Это же получим, раскрывая скобки в выражении (2):

Из этого выражения видно, что в формирователе скорректированной спутниковой высоты 13 осуществляется списывание систематической ошибки в сигнале спутниковой высоты (с постоянной времени Т12), за счет ее пропускания через "изодромный" фильтр, и подавление шумовой ошибки в сигнале расчетного значения абсолютной высоты (обусловленной погрешностью счисления координат и погрешностью радиовысотомера).
Начальные условия интегратора апериодического фильтра (спутниковой высотной поправки) в формирователе скорректированной спутниковой высоты 13 задаются по снятию сигнала обжатия главных стоек шасси при отрыве от ВПП на аэродроме взлета с датчика 7 
где: Δhc0 -начальное значение спутниковой высотной поправки;
U90 - расчетное значение абсолютной высоты на аэродроме вылета;
 - значение спутниковой высоты на аэродроме вылета.
- значение спутниковой высоты на аэродроме вылета.
Учитывая, что расчетное значение абсолютной высоты на аэродроме вылета практически не содержит погрешности 
 т.е. систематическая погрешность спутниковой высоты снимается на аэродроме вылета.
т.е. систематическая погрешность спутниковой высоты снимается на аэродроме вылета.
То есть в процессе полета изменение систематической погрешности измерителя спутниковой высоты по сравнению с ее значением на аэродроме вылета списывается с постоянной времени Т12, поскольку систематическая погрешность измерителя спутниковой высоты изменяется в процессе полета значительно медленнее (постоянная времени больше Т12), то в процессе полета в сигнале скорректированной спутниковой высоты она отсутствует.
При отсутствии исправности расчетного значения абсолютной высоты, вход интегратора апериодического фильтра обнуляется и на его выходе запоминается систематическая погрешность спутниковой высоты с обратным знаком. Время "старения" указанной погрешности составляет десятки минут, что позволяет использовать скорректированную спутниковую высоту не только при кратковременных выходах РВ из рабочей зоны, но и при его отказе.
В формирователе рассогласования 10 формируется сигнал рассогласования.
При наличии исправности спутникового канала измерения высоты навигационной системы 4  и исправности расчетного значения абсолютной высоты, сигнал рассогласования формируется путем выбора второго по величине сигнала из: взвешенной величины первого рассогласования между расчетным значением абсолютной высоты полета с формирователя расчетного значения абсолютной высоты 9 и ее оценкой с формирователя оценки абсолютной высоты 12, взвешенной величины второго рассогласования между скорректированной высотой спутникового канала с формирователя скорректированной спутниковой высоты 13 и оценкой абсолютной высоты с формирователя 12, и нулевого сигнала.
и исправности расчетного значения абсолютной высоты, сигнал рассогласования формируется путем выбора второго по величине сигнала из: взвешенной величины первого рассогласования между расчетным значением абсолютной высоты полета с формирователя расчетного значения абсолютной высоты 9 и ее оценкой с формирователя оценки абсолютной высоты 12, взвешенной величины второго рассогласования между скорректированной высотой спутникового канала с формирователя скорректированной спутниковой высоты 13 и оценкой абсолютной высоты с формирователя 12, и нулевого сигнала.

где mid - оператор выбора второго по величине сигнала,
коэффициенты взвешивания k1, k2 определяют постоянные времени фильтрации при прохождении на выход формирователя рассогласования 10 первого либо второго рассогласования.
При отсутствии исправности расчетного значения абсолютной высоты (U8=0) сигнал рассогласования равен взвешенной величине второго рассогласования между скорректированной высотой спутникового канала с формирователя скорректированной спутниковой высоты 13 и оценкой абсолютной высоты с формирователя оценки абсолютной высоты 12.

При отсутствии исправности спутникового канала измерения высоты навигационной системы 4  сигнал рассогласования равен взвешенной величине первого рассогласования между расчетным значением абсолютной высоты полета с формирователя расчетного значения абсолютной высоты 9 и ее оценкой с формирователя оценки абсолютной высоты 12:
сигнал рассогласования равен взвешенной величине первого рассогласования между расчетным значением абсолютной высоты полета с формирователя расчетного значения абсолютной высоты 9 и ее оценкой с формирователя оценки абсолютной высоты 12:

При одновременном отсутствии исправности спутникового канала измерения высоты навигационной системы 4 и расчетного значения абсолютной высоты сигнал рассогласования равен нулю.

В формирователе высотной поправки 11 формируется величина высотной поправки путем интегрирования сигнала рассогласования с формирователя рассогласования 10.
Выходной сигнал формирователя высотной поправки 11 формируется в соответствии со следующим операторным выражением:

При одновременном отсутствии исправности спутникового канала измерения высоты навигационной системы 4 и расчетного значения абсолютной высоты на вход формирователя высотной поправки 11 поступает нулевой сигнал и на его выходе запоминается значение высотной поправки, соответствующее этому моменту времени.
В состав формирователя высотной поправки 11 также входит интегрирующий элемент (интегратор), позволяющий задавать начальные условия.
Начальные условия высотной поправки в формирователе высотной поправки 11 задаются по снятию сигнала обжатия главных стоек шасси с датчика 7 при отрыве от ВПП на аэродроме вылета 
где:  - начальное значение высотной поправки;
- начальное значение высотной поправки;
U90 - значение абсолютной высоты на аэродроме вылета;
U20 - расчетное значение абсолютной высоты на аэродроме вылета.
Учитывая, что расчетное значение абсолютной высоты на аэродроме вылета практически не содержит погрешности 
 т.е. систематическая погрешность барометрической высоты
т.е. систематическая погрешность барометрической высоты  снимается на аэродроме вылета. Где Нб0 - значение абсолютной барометрической высоты на аэродроме вылета.
снимается на аэродроме вылета. Где Нб0 - значение абсолютной барометрической высоты на аэродроме вылета.
В формирователе 12 осуществляется формирование оценки абсолютной высоты. Указанная оценка формируется путем суммирования сигнала измерителя барометрической высоты с измерителя абсолютной барометрической высоты 2 с сигналом высотной поправки с формирователя высотной поправки 11.

где Нб- выходной сигнал измерителя абсолютной барометрической высоты 2.
Раскрывая выражения (1, 6, 8, 9) получим выражение для оценки абсолютной высоты полета в случае прохождения на выход формирователя 10 первого рассогласования:

или 
где  - высотная поправка.
- высотная поправка.
k1- коэффициент взвешивания первого рассогласования, определяется исходя из желаемого значения Т1.
Учитывая, что расчетное значение абсолютной высоты и сигнал барометрического измерителя содержат полезный сигнал и погрешность получим:

где: δhб- погрешность измерения барометрической высоты.
где: δhрн- погрешность определения расчетного значения абсолютной высоты, обусловленная погрешностью радиовысотомера (РВ) и ошибкой счисления текущих координат местоположения самолета (ТКМС).
Учитывая, что постоянная времени Т1 выбирается из условия выделения медленно меняющейся (систематической) погрешности барометрической высоты и подавления случайных погрешностей, получаем, что на выходе формирователя высотной поправки 11 выделяется указанная систематическая погрешность, т.е.
 где
где  - систематическая погрешность барометрической высоты и
- систематическая погрешность барометрической высоты и

То есть в процессе полета изменение систематической погрешности измерителя барометрической высоты по сравнению с ее значением на аэродроме вылета списывается с постоянной времени Т1, а погрешность расчетного значения абсолютной высоты полета, обусловленная ошибкой счисления координат местоположения ЛА навигационной системой и погрешностью радиовысотомера, фильтруется с этой же постоянной времени. Поскольку систематическая погрешность измерителя барометрической высоты изменяется в процессе полета значительно медленнее (постоянная времени больше Т1), то в процессе полета в сигнале оценки абсолютной высоты она отсутствует.
Аналогичное выражение имеет место в случае прохождения на выход формирователя 10 второго рассогласования.
U12=U9/(T2p+1)+Нб*Т2р/Т2р+1; где Т2=1/k2;
Где: k2- коэффициент взвешивания второго рассогласования, определяется исходя из желаемого значения Т2.
Осуществляющаяся в формирователе 10 сортировка первого и второго рассогласований с использованием селектора выбора промежуточного по уровню сигнала (mid), к третьему входу которого подключен нулевой сигнал, позволяет существенно снизить уровень погрешностей измерений на его выходе и повысить точность оценивания высоты полета.
При одновременном отсутствии исправности спутникового канала измерения высоты навигационной системы 4 и исправности расчетного значения абсолютной высоты (U8=0) сигнал рассогласования равен нулю и высотная поправка запоминается на выходе формирователя 11. Время "старения" указанной погрешности составляет десятки минут, что позволяет использовать оценку абсолютной высоты не только при кратковременных выходах РВ и спутникового канала навигационной системы (СНС) из рабочей зоны, но и при их отказе.
Таким образом обеспечивается высокая точность формирования оценки абсолютной высоты, за счет:
- выделения и компенсации медленно меняющихся (систематических) погрешностей измерителей спутниковой и барометрической высоты в течение всего полета, начиная с аэродрома вылета;
- исключения аномальных измерений радиовысотомера и обнаружения отказов средств для запоминания и обработки базы данных высот рельефа местности путем их функционального контроля;
- снятия исправности расчетного значения абсолютной высоты при снижении точности определения ТКМС и полете над горным рельефом местности.
Многофункциональный маневренный самолет (блок-схема которого, представлена на Фиг. 2) содержит комплексную систему управления 17, включающую систему измерения воздушно скоростных параметров 18, информационно управляющую систему 19 с вычислительной системой 20, средствами индикации и сигнализации 21, комплекс пилотажно-навигационного оборудования 22 с навигационными датчиками 5, радиовысотомером 1 и средствами для запоминания и обработки базы данных высот рельефа местности 6, шасси 23 с датчиками обжатия стоек шасси 24, рулевые привода аэродинамических поверхностей 25.
Входы комплексной системы управления 17 соединены с вычислительной системой 20, навигационными датчиками 5, а выходы - с вычислительной системой 20 и рулевыми приводами 25. Информационно управляющая система 19 соединена с навигационными датчиками 5, радиовысотомером 1 и средствами для запоминания и обработки базы данных высот рельефа местности 6.
В вычислительной системе 20 реализован алгоритм формирования оценки абсолютной высоты, приведенный выше, и алгоритмы режима ПСЗ:
Для этого на входы вычислительной системы 20 поступают сигналы с выходов:
- блока навигационных датчиков 5;
- радиовысотомера 1;
- системы измерения воздушно скоростных параметров 18;
- комплексной системы управления 17
В комплексной системе управления 17 осуществляется:
- формирование признака обжатия главных стоек шасси по сигналу с датчиков обжатия стоек шасси 24 и выдача его в вычислительную систему 20;
- формирование сигналов управления рулевыми приводами 25 по управляющим сигналам с вычислительной системы 20.
На Фиг. 3 представлен фрагмент процесса оценивания высоты, полученный при математическом моделировании устройства при полете над горным рельефом местности (углы уклона 15-20 град) с имитацией погрешностей измерителей (систематическая погрешность высоты СНС - 80 м, систематическая ошибка измерителя барометрической высоты - 150 м), максимальная погрешность определения ТКМС навигационной системой (3σ=300 м)).
В верхней части графика представлены входные сигналы: расчетное значение абсолютной высоты полета - Hga, высота спутниковой навигационной системы - Hsns, абсолютная барометрическая высота - Hb, а также высота полета ЛА- Ysam и оценка абсолютной высоты - Habs.
В средней (по высоте) части графика представлены: высота рельефа местности в ТКМС-Yr, величина уклона рельефа- Ukl.
В нижней части графика приведены разовые команды, указывающие номер сигнала, проходящего на коррекцию:
Нижний (U3) - прохождение нулевого сигнала, средний (U2) - прохождение второго рассогласования, верхний (U1) - прохождение первого рассогласования.
Количественные данные сведены в Таблицы 1, 2.


Где:
- ErrSao- среднеарифметическое значение ошибки оценивания (Ysam-Habs) (м),
Mi, МО, Ма - соответственно минимальное, среднее и максимальное значения ошибки оценивания (м);
- Количество прохождений на выход формирователя 10 нулевого сигнала (mid[0]), первого ([1=map]) и второго ([2=Sns]) рассогласований;
- Yr Mi, Yr МО, Yr ma - соответственно минимальное, среднее и максимальное значения высот рельефа (м);
- Ukl Mi, Ukl МО, Ukl ma - соответственно минимальное, среднее и максимальное значения уклона рельефа (градусы);
Проведенное математическое моделирование показало, что в условиях маневрирования над горным рельефом местности во всем эксплуатационном диапазоне углов крена и тангажа ошибка оценивания абсолютной высоты полета самолета в 2-5 раз меньше погрешностей известных измерителей.
Материалы летных испытаний системы подтвердили результаты математического моделирования.

Способ обогрева лобового стекла летательного аппарата (варианты)
Теплообменный модуль системы кондиционирования воздуха самолета
Грузовой отсек самолета
Воздухозаборник самолета
Приводной центробежный суфлёр газотурбинного двигателя
Многофункциональный одноместный самолет с комплексной системой управления
Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов
Летательный аппарат
Устройство для проверки работоспособности ограничительных диодов
Способ определения координат центра масс самолета
Способ дистанционного управления полетом беспилотного летательного аппарата и беспилотная авиационная система
Способ дистанционного управления полетом беспилотного летательного аппарата и беспилотная авиационная система
Многофункциональный одноместный самолет с комплексной системой управления
Способ и система предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, многофункциональный, маневренный самолет с системой предупреждения столкновения с земной поверхностью
Способ и устройство формирования абсолютной высоты полета летательного аппарата
Способ и система предотвращения столкновения летательного аппарата с рельефом местности
Способ управления полетом беспилотного летательного аппарата и беспилотная авиационная система
Интегрированный комплекс бортового оборудования беспилотного летательного аппарата

