Результат интеллектуальной деятельности: МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к многофункциональным высокоманевренным самолетам, системы управления которых реализуют функции систем дистанционного управления (СДУ), автоматического управления (САУ), систем ограничительных сигналов (СОС).
Перечень сокращений, используемых в описании:
Известен самолет, система управления которым содержит четыре одинаковых вычислительных устройства, расположенные в двух соединительных шкафах и соединенные по входам и выходам между собой через мультиплексную линию связи, четыре блока питания, расположенные в этих же соединительных шкафах, выходы каждого из которых соединены с входами вычислительных устройств, усилители мощности, входы которых подсоединены к выходам вычислителей, а выходы через соединительный шкаф и кабельную сеть самолета к входам электрогидравлических приводов поверхностей управления и поворотных сопел, выходы которых через кабельную сеть и соединительные шкафы соединены с входами вычислителей, датчики параметров движения самолета, выходы которых соединены с входами вычислителей, кнопки и переключатели в кабине, включающие и выключающие режимы работы системы (Известен из: Журнал «Полет», Спец. выпуск Су; 1999 г.; статья «Развитие систем управления самолетов «Су», или из Сборник трудов пятого международного симпозиума «Авиационные технологии XXI века» том 1, издательство ЦАГИ; 1999 г.; стр. 515-521, или из «Истребитель «Су» Главы 5 и 7, Изд. группа Бадретдинов и К°. Москва, 2005 г.).
Недостатками системы управления известного самолета является следующее.
1. Наличие отдельных вычислителей САУ, СОС, сопла, каждый из которых имеет свои блоки питания, установочные стеллажи, коммутационную сеть (провода, разъемы и т.д.), что значительно ухудшает массово-габаритные характеристики системы.
2. Законы управления, реализованные в известной системе, не предусматривают реализацию ряда функций, облегчающих летчику управление самолетом, а именно:
а) автоматическое триммирование усилий на ручке управления летчика,
б) изменение расхода ручки управления на единицу перегрузки (угла атаки) в зависимости от конкретной задачи на данном этапе полета (режим точного управления),
в) автоматическое парирование моментов сил, возникающих при отказе одного двигателя и вызывающих вращение самолета.
3. Реализованное в известном самолете воздушное торможение требует создания отдельной аэродинамической поверхности (тормозного щитка), что также ухудшает массово-габаритные характеристики самолета, сокращает полезные объемы и не позволяет изменять летчику интенсивность торможения.
Наиболее близким аналогом (прототипом) изобретения является самолет с системой дистанционного управления, описанный в патенте №2472672. Система управления указанного самолета отличается тем, что функции систем СДУ, САУ, СОС и управления поворотными соплами реализованы в единых вычислителях. Законы управления системы предусматривают выполнение таких облегчающих управление самолетом функций, как автотриммирование, точное управление, автоматическое парирование разворачивающего момента, возникающего при отказе двигателя, воздушное торможение.
Недостатком системы управления данного самолета является то, что она не выполняет таких существенных функций, как:
1. Измерение высотно-скоростных параметров (СИ ВСП).
2. Автоматическое управление тягой двигателей (АУТ).
3. Управление торможением колес шасси (СУТК).
4. Управление поворотом колес передней стойки шасси (СУС).
У прототипа измерение воздушно-скоростных параметров выполняется системой воздушных сигналов (СВС), получающей информацию от приемников воздушного давления (ПВД) (см. «Истребитель Су-27. Начало истории» Глава 5, Изд. группа Бадретдинов и Ко. Москва, 2005 г.). Это существенно увеличивает массу системы и повышает радиолокационную заметность самолета.
Функция автоматического управления тягой двигателя у прототипа отсутствует, что существенно увеличивает психофизиологическую нагрузку на летчика при пилотировании.
Системы СУТК и СУС у прототипа гидромеханические, что приводит к увеличению массы этих систем и невозможности существенного улучшения характеристик управляемости самолета при его движении по земле.
Задачей настоящего изобретения является создание самолета с комплексной системой управления (КСУ), которая выполняла бы функции не только систем СДУ, САУ, СОС, управления поворотными соплами, но и функции СИ ВСП, АУТ, СУТК, СУС, с учетом требований, вызванных особенностями маневренных самолетов.
Известен ряд изобретений, относящихся к СИ ВСП, СУТК и СУС.
1. Изобретение по патенту №2290646 предусматривает размещение датчиков, блоков и агрегатов системы СИ ВСП в одном специальном аэродинамически обтекаемом корпусе, крепящемся к ЛА. Данная система непригодна для маневренных самолетов, поскольку подвеска дополнительных контейнеров ухудшает аэродинамические характеристики самолета. Устранение этого недостатка является одной из задач предлагаемого изобретения.
2. Изобретение по патенту №2102283 предусматривает обеспечение соответствия между заданными летчиком перемещениями тормозного рычага (тормозные площадки педального механизма или отдельный рычаг тормоза) и замедлением движения самолета. При этом полному перемещению рычага соответствует предельное замедление. Указанная система непригодна для маневренных самолетов, имеющих тормозной парашют, т.к. при ее использовании выпуск парашюта не увеличит замедления.
Устранение данного недостатка также является одной из задач предлагаемого изобретения.
3. В изобретении по патенту №2070140 предлагается изменять зависимость между отклонением педалей и отклонением переднего колеса при помощи отдельного рычага, перемещаемого пилотом. Такое решение неприемлемо для маневренных самолетов, т.к. требует установки в кабине дополнительного органа управления и отвлекает внимание летчика при пробеге и рулении.
Технический результат, на достижение которого направлено изобретение, заключается в снижении психофизиологической нагрузки на летчика за счет реализации функции автоматического управления тягой двигателей; снижении радиолокационной заметности самолета за счет применения малогабаритных приемников-преобразователей воздушных давлений (ППВД) вместо традиционных ПВД; улучшении массово-габаритных характеристик самолета путем отказа от ПВД и существенного сокращения длины подвижной механической проводки; повышении эффективности торможения путем реализации функции СУТК с контуром автоматического управления замедлением на пробеге с учетом выпуска тормозного парашюта; совершенствовании законов управления СУС с учетом скорости движения по взлетно-посадочной полосе (ВПП).
Указанный технический результат достигается тем, что в самолете с комплексной системой управления, содержащем фюзеляж, крыло, оперение, шасси, силовую установку, комплексную систему управления, которая включает вычислительный блок, соединенный по входам и выходам с приводами рулевых поверхностей и поворотных сопел силовой установки через кабельную сеть, датчики движения самолета, выходы которых связаны через внутреннюю мультиплексную линию связи с вычислительным блоком, блок преобразования сигналов, связанный через внутреннюю мультиплексную линию связи с вычислительным блоком, соединенным по внешней мультиплексной линии связи с информационно-управляющей системой, согласно изобретению комплексная система управления содержит по меньшей мере один вычислитель воздушно-скоростных параметров, связанный по входам и выходам по меньшей мере с одним приемником-преобразователем воздушных давлений (ППВД), предназначенным для измерения полного и статического давлений, и с по меньшей мере одним датчиком температуры заторможенного потока, а также с вычислительным блоком, который по входам и выходам связан по меньшей мере с одним ППВД, расположенным во внутреннем отсеке самолета и предназначенным для измерения статического давления, кроме того, комплексная система управления снабжена блоком управления шасси (БУШ), содержащим вычислители сигналов управления исполнительными механизмами поворота и торможения колес, выходы которых подключены к входам усилителей мощности, выходы которых через БУШ и кабельную сеть соединены с входами исполнительных механизмов поворота и торможения колес, а входы вычислителей через кабельную сеть самолета и БУШ связаны с выходами датчиков исполнительных механизмов поворота и торможения колес, датчиков обжатия амортизаторов шасси и датчиков частоты вращения колес шасси.
Вычислительный блок системы управления имеет алгоритмический блок, предназначенный для вычисления и передачи сигналов необходимых положений приводу рычагов управления двигателями, который на основании поступивших от органов управления в кабине сигналов заданного изменения скорости или от поступивших из алгоритмического блока СДУ, САУ, СОС, управления приводами рулевых поверхностей и поворотных сопел силовой установки сигналов заданной скорости или заданного положения рычагов управления двигателями, вычисляет и передает сигналы необходимых положений приводу рычагов управления двигателями.
Вычислитель БУШ включает алгоритмический блок расчета требуемых давлений в системе торможения колес шасси в зависимости от положения органов управления на основании сигналов, поступающих от органов управления в кабине, выпуска тормозного парашюта, обжатия амортизаторов шасси и частоты вращения колес шасси, выход которого соединен с входом алгоритмического блока управления и контроля агрегатами тормозов колес шасси, выход которого через усилители мощности и кабельную сеть соединен с входами агрегатов тормозов колес шасси, также БУШ включает алгоритмический блок расчета требуемого угла поворота колес передней стойки шасси в зависимости от положения органов управления, на вход которого поступают сигналы органов управления поворотом колес в кабине и сигнал частоты вращения колес передней стойки, а выход соединен с входом алгоритмического блока управления и контроля приводом системы управления поворотом колес передней стойки шасси, выход которого через усилители мощности, БУШ и кабельную сеть соединен с входом привода управления поворотом колес передней стойки шасси.
Для устранения недостатка в СУТК используется сигнал выпуска тормозного парашюта, который поступает в алгоритмический блок, определяющий зависимость давления в агрегатах управления торможением шасси от отклонения тормозных площадок педалей, и изменяет ее в соответствии со скоростью самолета и временем с момента выпуска парашюта.
Для устранения недостатка в СУС зависимость угла поворота колес передней стойки от перемещения педалей корректируется автоматически по скорости руления, определяемой по сигналам датчика частоты вращения колес передней стойки.
При реализации указанных выше мероприятий предложенная комплексная система управления (КСУ) обеспечивает управление самолетом не только в воздухе, но и на земле, а также существенно снижает нагрузку на летчика при пилотировании.
Изобретение поясняется чертежами, где изображены:
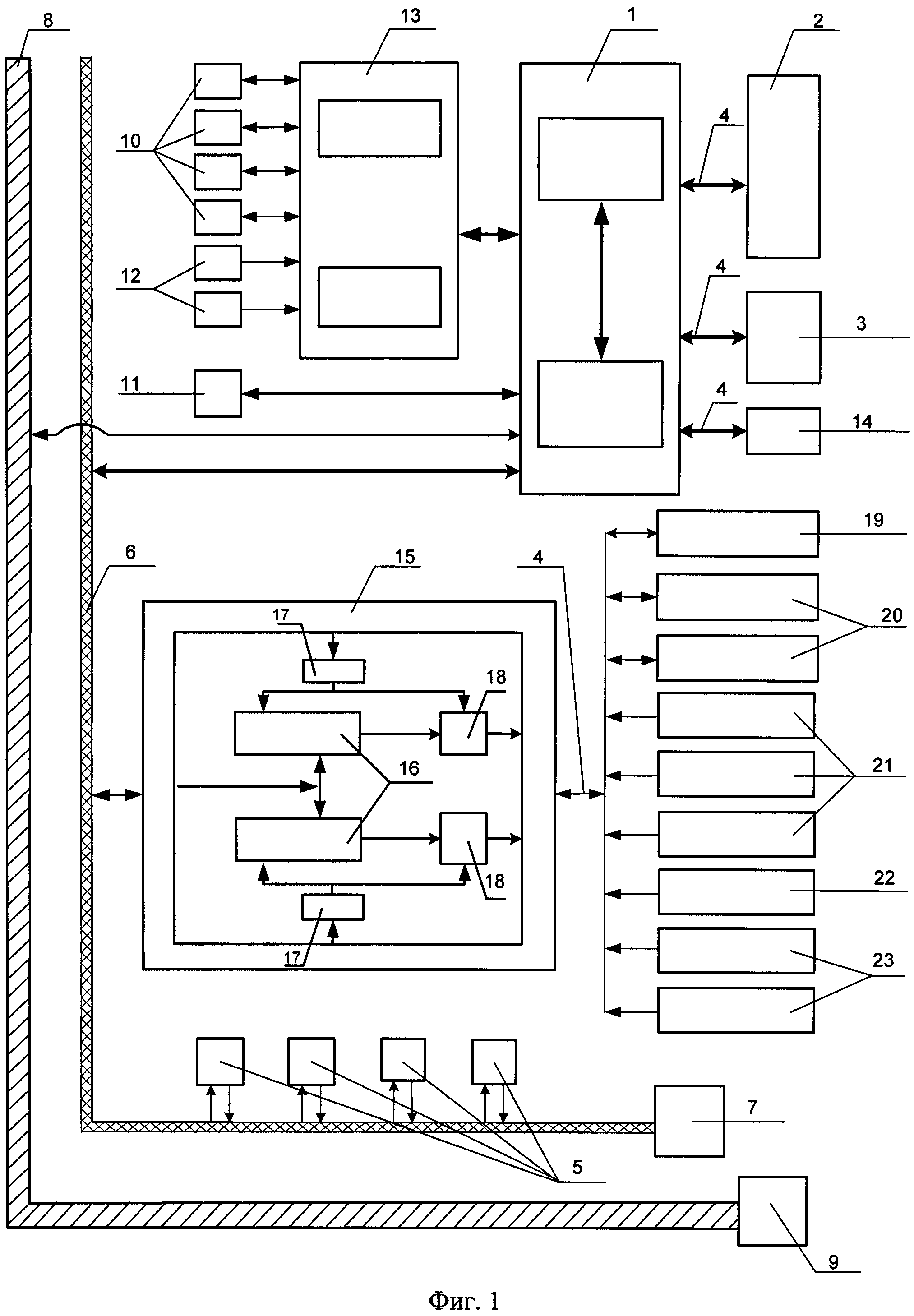
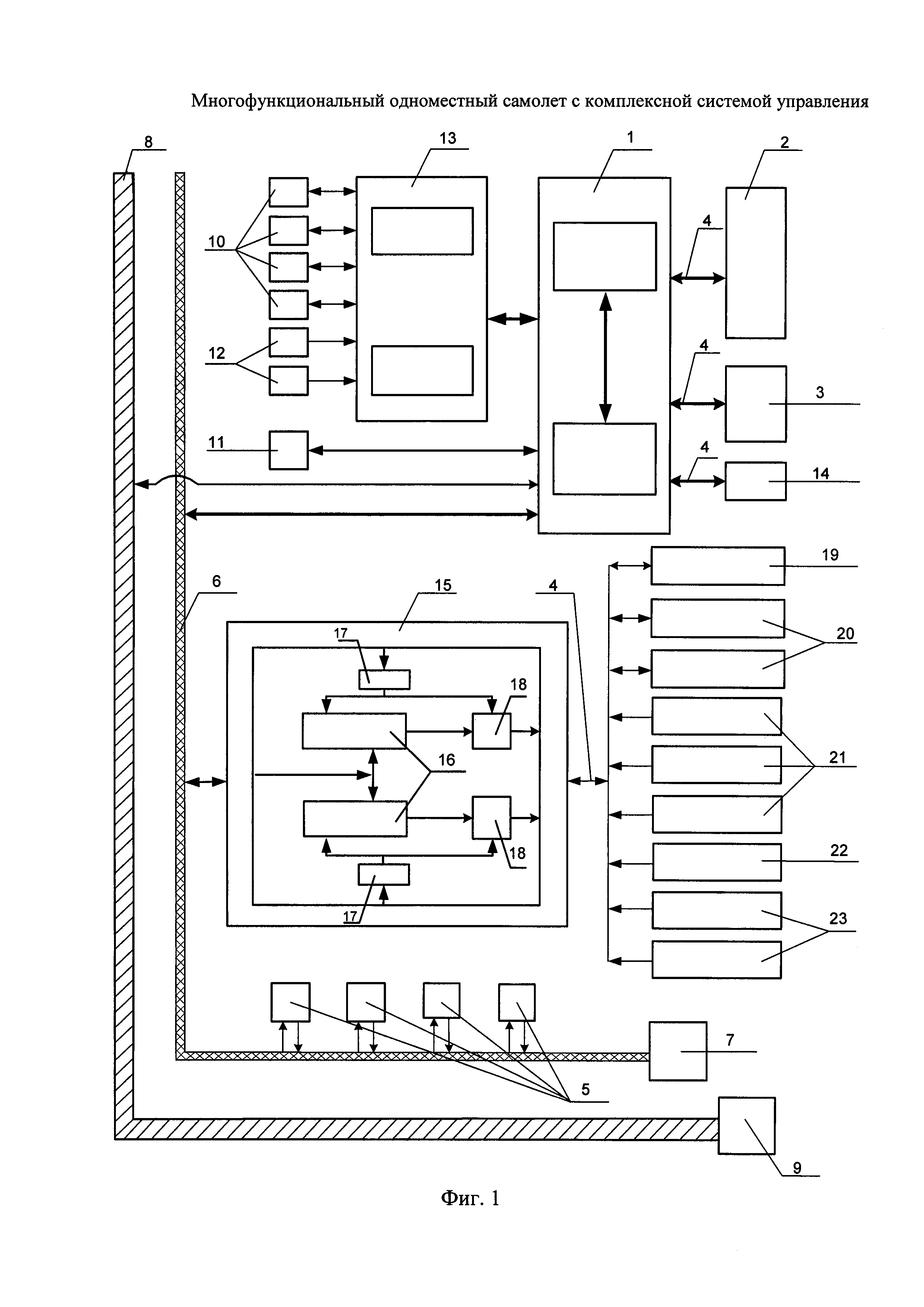
на фиг. 1 - структурная схема системы КСУ;
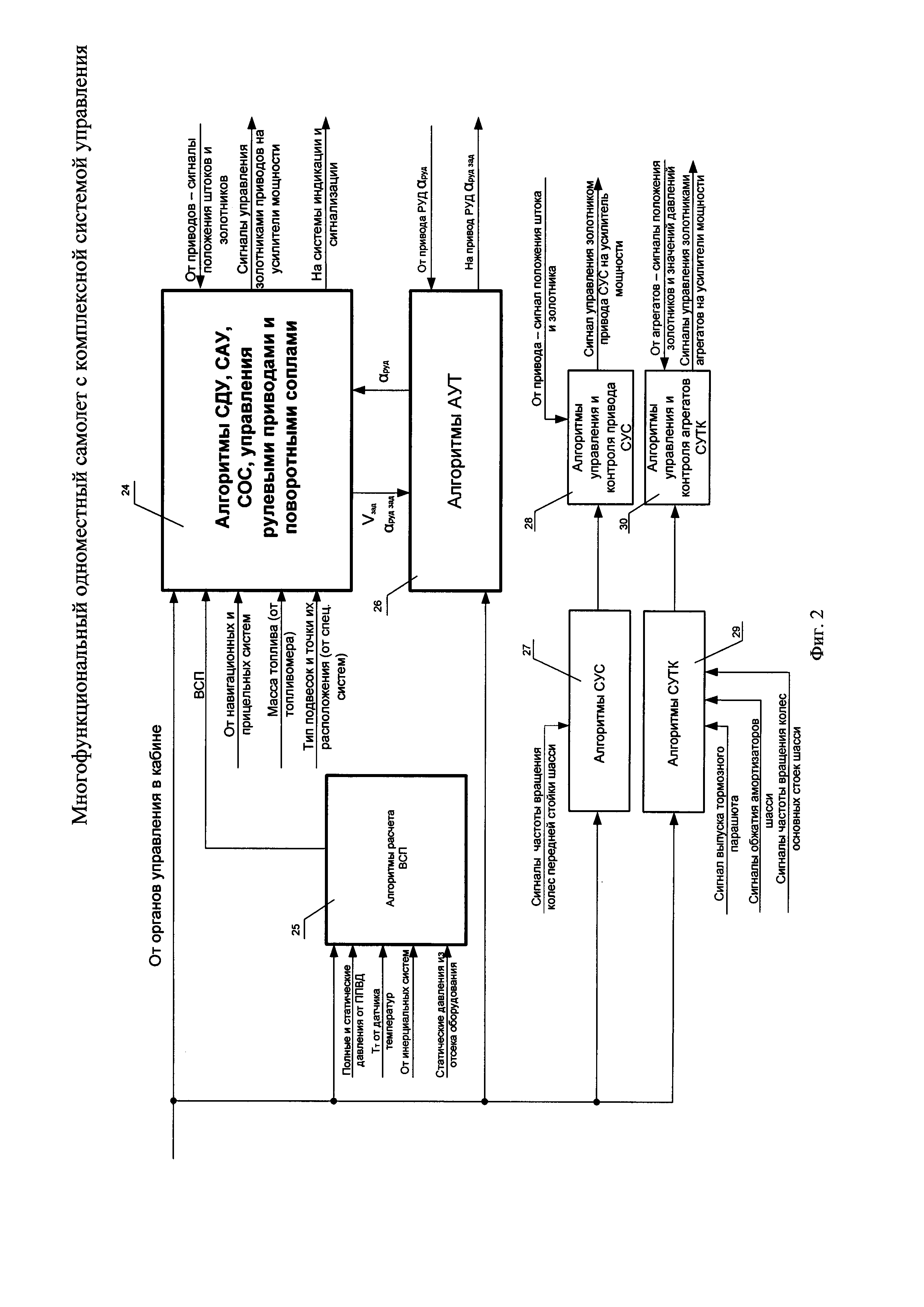
на фиг. 2 - блок-схема алгоритмов КСУ.
Самолет содержит фюзеляж, крыло, оперение, шасси, силовую установку (на фигурах не представлены) и комплексную систему управления (КСУ), структурная схема которой изображена на фиг. 1. КСУ включает в себя вычислительный блок 1, в котором в соответствии с алгоритмами систем СДУ, САУ, СОС вычисляются сигналы необходимого отклонения рулевых поверхностей и поворотных сопел, служащих для изменения положения самолета в пространстве. В соответствии с вычисленными сигналами необходимого отклонения рулевых поверхностей и поворотных сопел, в этом же вычислительном блоке 1 вычисляются сигналы необходимого перемещения золотников приводов рулевых поверхностей 2 и поворотных сопел 3. Выходы вычислительного блока 1 через кабельную сеть 4 самолета соединены с входами исполнительных механизмов отклонения рулевых поверхностей и управления вектором тяги, а именно приводов рулевых поверхностей 2 и поворотных сопел силовой установки 3.
Сигналы с датчиков положений исполнительных механизмов 2, 3 через кабельную сеть 4 самолета передаются в вычислительный блок 1 и используются в нем в качестве обратных связей.
Для обеспечения надежности в части управления рулевыми поверхностями система четырехкратно резервирована.
Параметры движения самолета (перегрузки и угловые скорости) определяются резервированными датчиками 5, сигналы с выходов которых поступают в вычислительный блок 1 управления рулевыми поверхностями через внутреннюю мультиплексную линию связи 6. Аналоговые сигналы с датчиков и органов управления, расположенных в кабине пилота, поступают на вход блока преобразования сигналов 7, преобразуются в цифровые и также передаются в вычислительный блок 1 через внутреннюю мультиплексную линию связи 6.
Сигналы самолетных систем, необходимые для работы САУ, СОС, и СДУ поступают в вычислительный блок 1 по внешней мультиплексной линии связи 8 через информационно-управляющую систему (ИУС) 9. По этой же линии в ИУС выдаются сигналы из КСУ для индикации летчику режимов работы и состояния системы.
Для выполнения функции СИ ВСП в состав КСУ включены четыре ППВД 10, расположенных на поверхности носовой части фюзеляжа и предназначенных для измерения полного и статического давлений, один ППВД 11, расположенный внутри отсека оборудования и предназначенный для измерения статического давления, два датчика температуры заторможенного потока 12 и два двухканальных вычислителя воздушных параметров (ВВП) 13.
Приемная часть ППВД имеет по меньшей мере четыре радиальных канала, выполненные в различных, заранее известных направлениях. Радиальные каналы соединены с размещенными внутри ППВД датчиками, измеряющими воздушное давление. Величина давления в радиальных каналах зависит от величины угла, который ось канала составляет с направлением набегающего потока. За счет этого, зная направления каналов ППВД относительно осей самолета, по разности измеренных в каналах давлений возможно рассчитать воздушно-скоростные параметры полета (ВСП).
ППВД, используемый в рамках настоящего изобретения, формирует для КСУ четыре сигнала воздушных давлений.
Измеренные ППВД 10 давления преобразуются в цифровые сигналы, которые с выходов ППВД 10 поступают на входы ВВП 13, где по разнице измеренных давлений в соответствии с алгоритмами СИ ВСП рассчитываются воздушно-скоростные параметры полета (ВСП). Аналоговые сигналы температуры заторможенного потока с выходов датчиков 12 передаются на входы ВВП 13, где также используются для расчета ВСП. Сигналы ВСП с выходов ВВП 13 передаются на входы вычислительного блока 1.
С целью коррекции измерений ППВД 10, расположенных на поверхности носовой части фюзеляжа, внутри отсека бортового оборудования установлен дополнительный ППВД 11. Все отверстия ППВД 11 измеряют статическое давление в отсеке оборудования. Измеренные давления преобразуются в цифровые сигналы и поступают на вход вычислительного блока 1, откуда по цифровым линиям связи передаются на входы ВВП 13.
С выходов ВВП 13 на входы ППВД 10 и ППВД 11 поступают сигналы управления обогревом ППВД.
Для реализации функции автоматического управления тягой двигателей вычислительный блок 1 соединен с приводом рычагов управления двигателями (РУД) 14. Для обеспечения надежности в части функции АУТ система двукратно резервирована.
Сигналы заданных углов отклонения РУД с выхода вычислительного блока 1 поступают на входы привода РУД 14. С выхода привода РУД 14 на вход вычислительного блока 1 поступают сигналы фактических углов отклонения РУД и используются в качестве обратной связи.
Для выполнения функций СУТК и СУС в состав КСУ включен блок БУШ 15. Для обеспечения надежности в части СУТК и СУС система двукратно резервирована.
БУШ 15 содержит два однотипных вычислительных канала, в каждом из которых установлен вычислитель 16, реализующий:
а) алгоритмы формирования сигналов требуемого угла поворота колес передней стойки шасси и требуемой величины замедления при пробеге (алгоритмы СУС и СУТК);
б) алгоритмы управления и контроля исправности привода СУС и агрегатов СУТК.
В БУШ 15 размещены блоки питания 17, выходы напряжений которых подключены к входам вычислителей 16 и усилителям мощности 18, входы которых подключены к выходам вычислителей 16, а выходы усилителей мощности 18 подключены через БУШ 15 и кабельную сеть 4 самолета к входам исполнительных механизмов поворота и торможения колес, а именно к входам привода СУ С 19 и агрегатов тормозов колес 20.
Сигналы управления СУТК и СУС от органов управления в кабине по аналоговым линиям связи поступают в блок преобразования сигналов 7, где преобразуются в цифровой вид и по внутренней мультиплексной линии связи 6 поступают в вычислительный блок 1, откуда через внутреннюю мультиплексную линию связи 6 и БУШ 15 передаются на входы вычислителей 16.
Сигнал выпущенного положения тормозного парашюта через ИУС 9 по внешней мультиплексной линии связи 8 поступает в вычислительный блок 1, откуда по внутренней мультиплексной линии связи 6 и БУШ 15 поступает на входы вычислителей 16, где используется для изменения зависимости заданной величины замедления движения самолета от величины отклонения тормозных площадок педального механизма. По этой же линии 6 в вычислительный блок 1 из БУШ 15 передаются сигналы режимов работы и состояния систем СУТК и СУС для последующей индикации летчику.
Аналоговые сигналы с датчиков 21 обжатия амортизаторов шасси, датчика 22 частоты вращения колес передней стойки шасси и датчиков 23 частоты вращения колес основных стоек шасси через кабельную сеть 4 самолета и БУШ 15 передаются на входы вычислителей 16.
Сигналы положений датчиков штока привода СУС 19, золотников привода СУС 19 и агрегатов тормозов колес 20, а также сигналы величин давлений в системе торможения колес через кабельную сеть 4 самолета и БУШ 15 передаются на входы вычислителей 16 и используются в них для формирования сигналов, управляющих золотниками приводов.
На фиг. 2 показана блок-схема алгоритмов КСУ, иллюстрирующая решение задач СДУ, САУ, СОС, управления рулевыми приводами и поворотными соплами, СИ ВСП, АУТ, СУТК и СУС.
На вход алгоритмического блока СДУ, САУ, СОС, управления рулевыми приводами и поворотными соплами 24 поступают сигналы положения органов управления в кабине, значения воздушно-скоростных параметров из блока алгоритмов расчета ВСП 25, сигналы от прицельных и навигационных систем, значения массы топлива от топливомера, сигналы наличия подвесок, их типа и точек расположения от систем управления вооружением. Также на вход блока 24 поступают сигналы фактических положений золотников приводов рулевых поверхностей и поворотных сопел силовой установки. С выхода блока 24 на усилители мощности поступают сигналы управления золотниками приводов рулевых поверхностей и поворотных сопел силовой установки, где усиливаются и передаются на входы приводов рулевых поверхностей и поворотных сопел силовой установки. В блоке 24 посредством сравнения заданных значений положения золотников с фактическими также производится контроль исправности работы приводов.
На вход алгоритмического блока расчета ВСП 25 поступают сигналы полных и статических давлений от ППВД, расположенных на поверхности носовой части фюзеляжа, сигналы статических давлений от ППВД, расположенного в отсеке оборудования, сигналы температур от датчиков температуры заторможенного потока, сигналы от инерциальных систем, сигналы от органов управления в кабине. С выхода блока 25 на вход алгоритмического блока 24 поступают сигналы ВСП.
В алгоритмическом блоке 26 вычисляются сигналы заданных углов (αруд зад) отклонения РУДов и передаются на вход привода РУДов, на основании одного из поступивших на вход алгоритмического блока АУТ 26 сигналов: сигнала заданного изменения скорости, поступившего от органов управления в кабине, или сигнала заданной скорости (Vзад), поступившего из алгоритмического блока 24, или заданного положения РУД (αруд зад), поступившего из алгоритмического блока 24. С выхода привода РУДов на вход алгоритмического блока 26 передаются сигналы фактических положений РУДов и используются в качестве обратных связей.
На вход алгоритмического блока СУС 27 из кабины поступают сигналы положения органов управления поворотом колес и сигнал частоты вращения колес передней стойки шасси (ПСШ). В алгоритмическом блоке 27 производится расчет требуемого угла поворота колес ПСШ в зависимости от положения органов управления в кабине. Сигнал частоты вращения колес ПСШ используется для расчета скорости движения по ВПП и изменения передаточного отношения между отклонением педалей и углом поворота колес ПСШ в зависимости от величины рассчитанной скорости. Значение требуемого угла поворота колес с выхода блока 27 поступают на вход блока управления и контроля приводом СУС 28, в котором в соответствии с указанными значениями и сигналами положения датчиков штока и золотника электрогидравлического привода поворота колес ПСШ реализуются алгоритмы, определяющие значения сигналов управления золотником этого привода. Указанные сигналы через усилители мощности, БУШ и кабельную сеть передаются на вход привода поворота колес ПСШ. Также в блоке 28 производится контроль исправности работы привода поворота колес ПСШ посредством сравнения заданных значений положения золотника привода поворота колес ПСШ с фактическими.
На вход алгоритмического блока СУТК 29 поступают сигналы положения органов управления в кабине, сигнал выпуска тормозного парашюта, сигналы обжатия амортизаторов шасси и сигналы частоты вращения колес шасси. В алгоритмическом блоке 29 производится расчет требуемых давлений в системе торможения в зависимости от положения органов управления, сигнала обжатия амортизаторов шасси, сигнала частоты вращения колес шасси. Сигнал выпуска тормозного парашюта используется для изменения зависимости замедления движения самолета от перемещений органов управления в кабине при выпуске тормозного парашюта.
Значения требуемых давлений в системе торможения с выхода блока 29 поступают на вход блока управления и контроля агрегатами тормозов колес шасси 30, в котором в соответствии с указанными значениями и поступившими сигналами положений золотников агрегатов тормозов колес и значений давления в системе торможения реализуются алгоритмы, определяющие значения сигналов управления золотниками агрегатов тормозов колес. Указанные сигналы через усилители мощности, БУШ и кабельную сеть передаются на входы агрегатов тормозов колес. Также в блоке 30 производится контроль исправности работы агрегатов тормозов колес посредством сравнения заданных значений положений золотников агрегатов тормозов колес с фактическими.
Реализация в КСУ функции автоматического управления тягой двигателей позволяет осуществлять управление движением самолета без непосредственного участия летчика в широком диапазоне режимов целевого применения. За счет этого существенно снижается психофизиологическая нагрузка на летчика многофункционального самолета в части задач пилотирования и увеличиваются возможности его участия в решении других целевых задач.
Применение малогабаритных ППВД вместо традиционных ПВД позволяет существенно снизить радиолокационную заметность самолета.
Также отказ от традиционных ПВД и отказ от протяженной механической проводки СУС за счет замены ее на электрическую позволяет существенно снизить массу самолета.
Включение в состав КСУ БУШ с алгоритмами СУТК, учитывающими выпуск на пробеге тормозного парашюта, и алгоритмами СУС, учитывающими скорость движения по ВПП для автоматической коррекции зависимости угла поворота колес передней стойки от перемещения педалей, позволяет существенно повысить эффективность торможения и улучшить характеристики управляемости при движении по ВПП.
Самолет с системой дистанционного управления
Маневренный самолет
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ обогрева лобового стекла летательного аппарата (варианты)
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Самолет с системой дистанционного управления
Маневренный самолет
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ обогрева лобового стекла летательного аппарата (варианты)
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления

