Результат интеллектуальной деятельности: СЛЕДЯЩИЙ ПРИВОД
Вид РИД
Изобретение
Изобретение относится к области автоматического регулирования, а конкретно, к приводам наведения инерционных объектов, например, приводам наведения артиллерийского вооружения подвижных объектов.
Известен следящий привод П-800М АЮИЖ461324.011, АО «ВНИИ «Сигнал», г. Ковров, 2009 г., (принятый за прототип), предназначенный для наведения подвижной артиллерийской установки вертолета Ка-52. Этот следящий привод содержит (фиг. 1) последовательно соединенные сумматор 1, усилитель 2, исполнительный привод 3 и датчик углового положения нагрузки 4, выход которого соединен с первым входом сумматора 1. Второй вход сумматора 1 является управляющим входом, на который подается сигнал управления. Выход исполнительного привода 3 является выходом следящего привода, на котором устанавливается инерционная нагрузка (пушка). Особенностью конструкции вертолета Ка-52 является то, что артиллерийская установка размещена в нижней части корпуса вертолета, при этом следящий привод при перемещении пушки вниз позволяет опускаться стволу ниже уровня выпущенных шасси, что исключает (при опущенной вниз пушке) проведение штатной посадки вертолета или затрудняет проведение регламентных работ с приводом пушки на земле. Для обеспечения возможности посадки вертолета в указанной ситуации или для проведения регламентных работ на земле, следящий привод содержит устройство, обеспечивающее режим ограничения угла наведения пушки вниз при поступлении в привод команды «ШАССИ». Для реализации этого режима следящий привод прототипа содержит последовательно соединенные компаратор 5, схему И 6 и коммутатор 7, управляющий вход которого соединен с выходом схемы И 6, первый вход компаратора 5 подключен к выходу датчика углового положения нагрузки 4, на второй вход компаратора 5 подается опорное напряжение, на второй вход схемы И 6 поступает команда «ШАССИ», а выход коммутатора 7 соединен со вторым входом усилителя 2.
К недостатку данного следящего привода относится то, что ограничение опускания пушки сопровождается колебательными движениями пушки при достижении ею допустимого уровня опускания и поступлении в следящий привод команды «ШАССИ». Этот допустимый уровень определяется величиной опорного напряжения на втором входе компаратора 5. При поступлении в следящий привод сигнала управления, соответствующего наведению пушки вниз, на первом входе компаратора 5 появляется сигнал от датчика углового положения нагрузки 4 и когда этот сигнал превысит величину опорного напряжения на втором входе компаратора 5 (допустимого уровня опускания пушки) появляется сигнал на выходе компаратора 5, а следовательно и на первом входе схемы И 6. При поступлении на второй вход схемы И 6 команды «ШАССИ» на выходе схемы И 6 появляется управляющий сигнал, переключающий коммутатор 7, который подключает ко второму входу усилителя 2 электрический сигнал задающий наведение пушки вверх. Этот сигнал для наведения вверх выбран по величине таким образом, что превосходит электрический сигнал, поступающий на первый вход усилителя 2 для наведения пушки вниз. Под действием сигнала наведения вверх пушка движется вверх и когда сигнал от датчика углового положения нагрузки 4 станет меньше опорного напряжения на втором входе компаратора 5, сигнал на выходе компаратора 5 меняет свой знак и возвращает коммутатор 7 в исходное состояние. При этом коммутатор 7 отключает от второго входа усилителя 2 сигнал наведения пушки вверх. После чего пушка по заданному сигналу управления, который обеспечивает наведение пушки вниз, снова движется вниз до уровня срабатывания компаратора 5. Данный процесс повторяется и пушка осуществляет колебательные движения вблизи допустимого уровня, определяемого уровнем срабатывания компаратора 5. Этим режимом обеспечивается посадка вертолета с выпущенными шасси или проведение регламентных работ на земле. Однако наличие указанных колебаний пушки оказывает негативное влияние на процесс посадки вертолета, т.к. вносит дополнительные моментные возмущения, затрудняющие пилотирование вертолетом в момент посадки и снижающие надежность работы следящего привода.
Изобретение направлено на повышение надежности работы следящего привода за счет исключения колебаний пушки при ограничении движения следящего привода ниже заданного допустимого уровня при наличии команды «ШАССИ» и, тем самым, на исключение моментных возмущений от колебаний пушки в процессе посадки вертолета.
Сущность предлагаемого технического решения заключается в том, что в следящий привод, содержащий последовательно соединенные сумматор, усилитель, исполнительный привод и датчик углового положения нагрузки, выход которого соединен с первым входом сумматора, причем выход исполнительного привода является выходом следящего привода, а также последовательно соединенные компаратор, схему И и коммутатор, управляющий вход которого соединен с выходом схемы И, первый вход компаратора соединен с выходом датчика углового положения нагрузки, на второй вход компаратора подается опорное напряжение, а на второй вход схемы И поступает команда «ШАССИ», введен формирователь фиксированного значения угла, выход которого соединен с нормально-разомкнутым входом коммутатора, сигнал управления подключен к нормально-замкнутому входу коммутатора, а выход коммутатора соединен со вторым входом сумматора.
Материалы заявки поясняются фигурами, где представлены:
на фиг. 1 - блок-схема следящего привода, принятого за прототип;
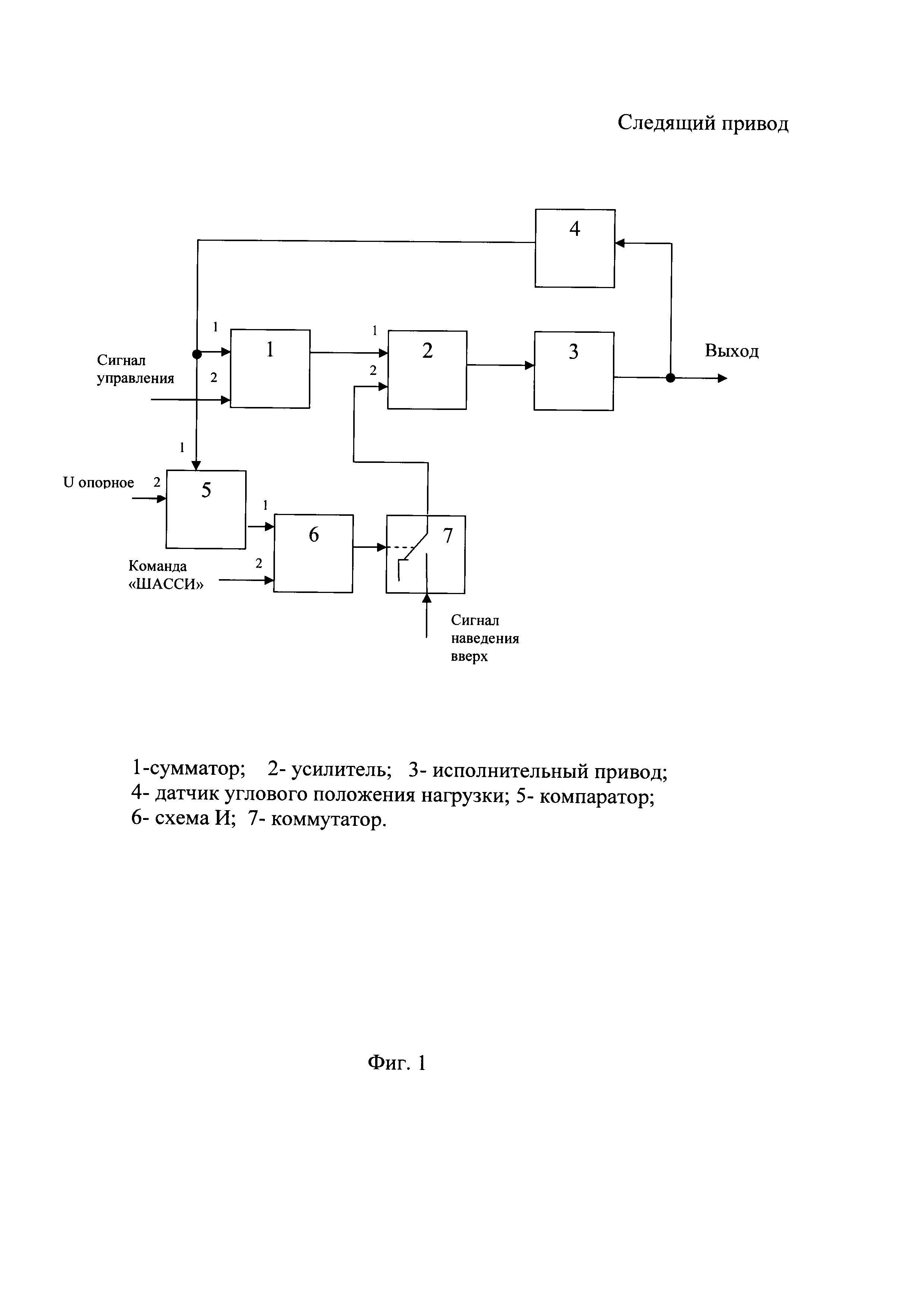
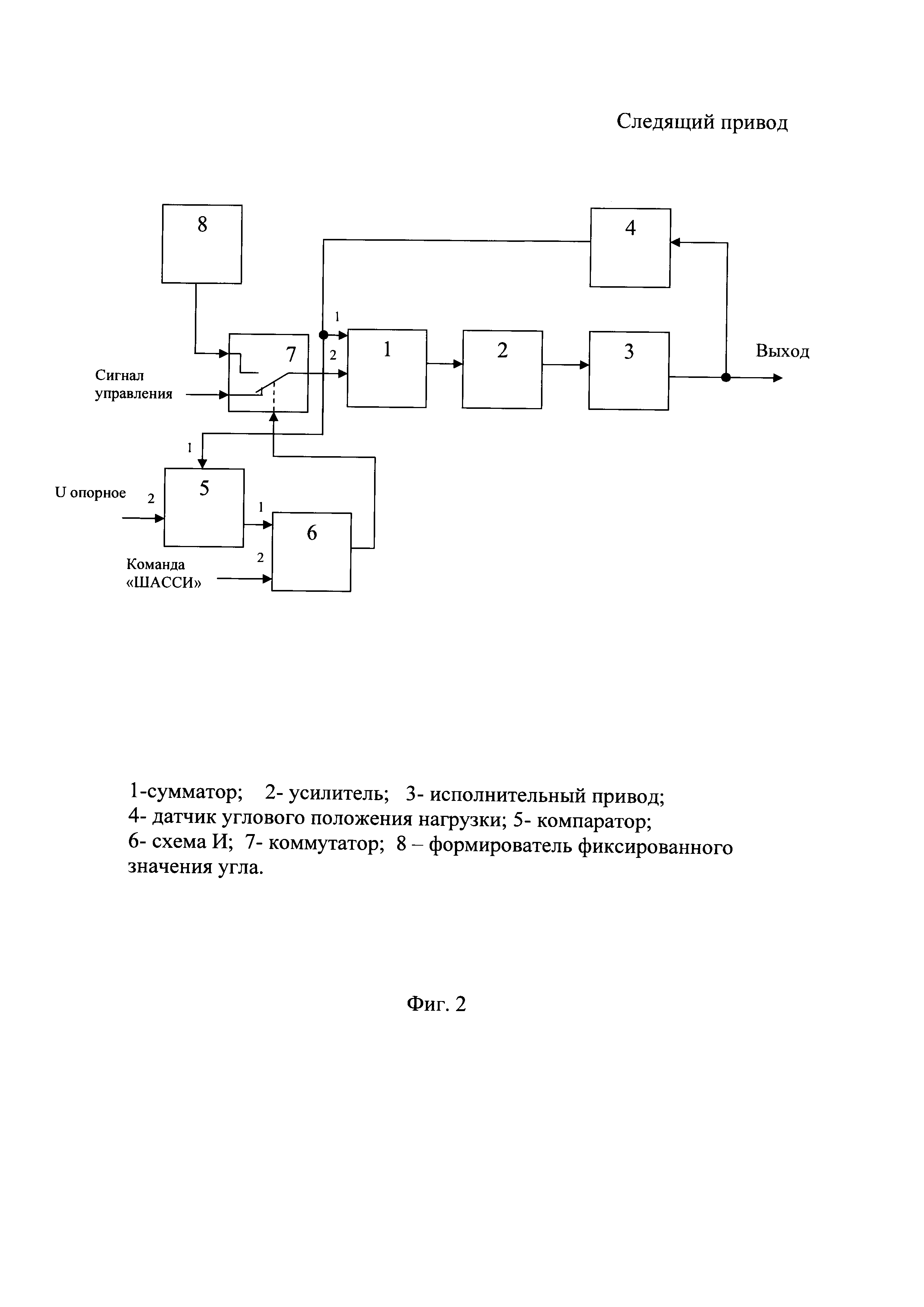
на фиг. 2 - блок-схема предлагаемого следящего привода;
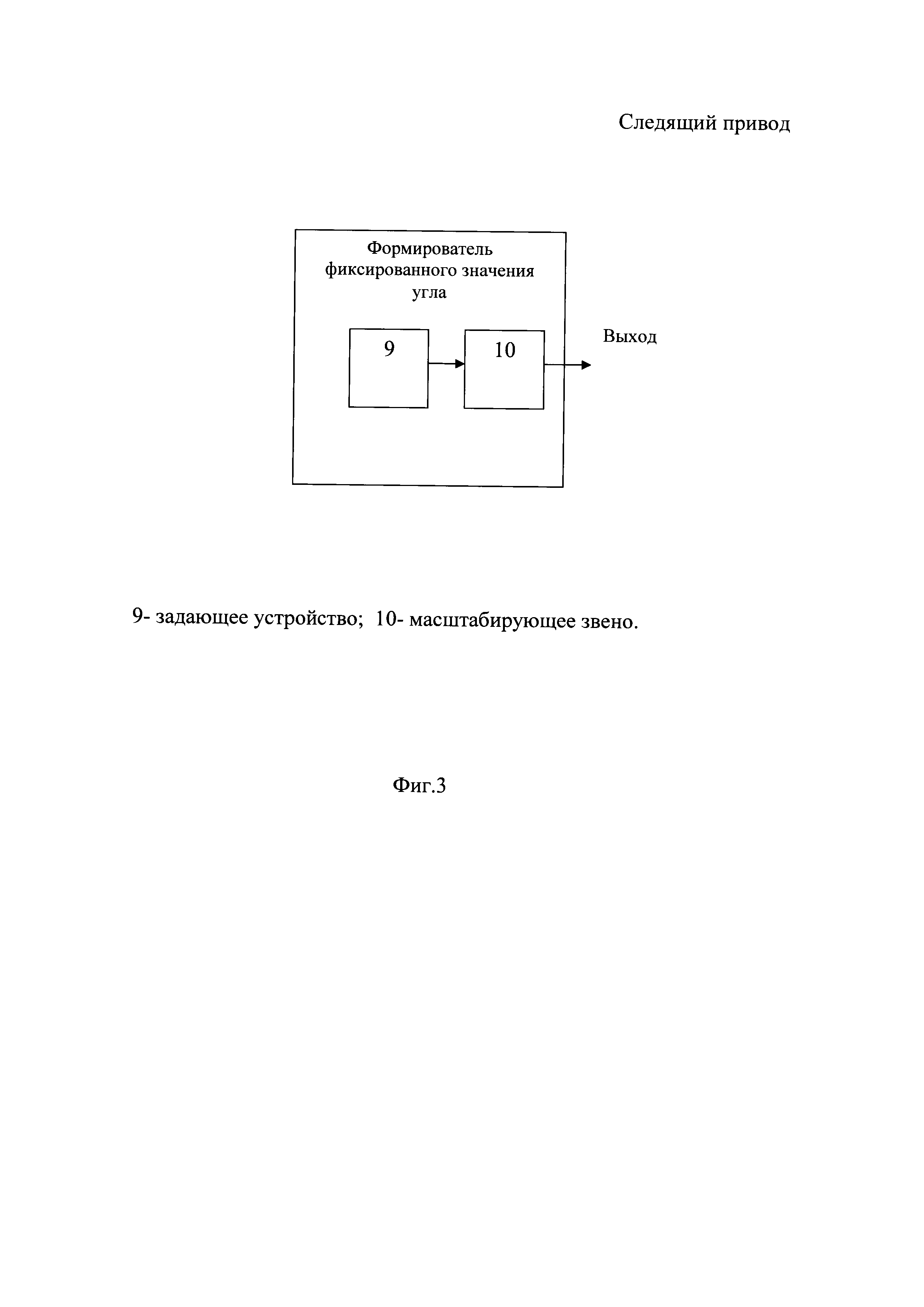
на фиг. 3 - блок-схема формирователя фиксированного значения угла.
Предлагаемый следящий привод (фиг. 2) содержит последовательно соединенные сумматор 1, усилитель 2, исполнительный привод 3, датчик углового положения нагрузки 4, выход которого соединен с первым входом сумматора 1. Выход исполнительного привода 3 является выходом следящего привода, на котором устанавливается инерционная нагрузка (пушка). Следящий привод содержит также последовательно соединенные компаратор 5, схему И 6 и коммутатор 7, управляющий вход которого соединен с выходом схемы И 6. Первый вход компаратора 5 соединен с выходом датчика углового положения нагрузки 4, а на второй вход компаратора 5 подается опорное напряжение. На второй вход схемы И 6 поступает команда «ШАССИ». В следящий привод введен формирователь фиксированного значения угла 8, выход которого соединен с нормально-разомкнутым входом коммутатора 7, к нормально-замкнутому входу которого подключен сигнал управления, а выход коммутатора 7 соединен со вторым входом сумматора 1. Формирователь фиксированного значения угла 8 (фиг. 3) состоит, например, из последовательно соединенных задающего устройства 9, выполненного в виде делителя напряжения, и масштабирующего звена 10, выходной сигнал которого соответствует заданному углу, ниже которого пушка не должна опускаться.
Предлагаемый следящий привод работает следующим образом. На второй вход сумматора 1 (фиг. 2) через нормально-замкнутый контакт коммутатора 7 поступает сигнал управления, соответствующий наведению пушки вниз. С выхода сумматора 1, через усилитель 2, сигнал управления поступает на исполнительный привод 3, который осуществляет наведение пушки вниз. При наведении пушки ниже допустимого уровня, сигнал на первом входе компаратора 5, подключенном к выходу датчика углового положения нагрузки 4 становится больше опорного напряжения на втором входе компаратора 5, после чего появляется сигнал на выходе компаратора 5, а следовательно и на первом входе схемы И 6.
При работе привода вблизи земли или на земле с выпущенными шасси вертолета, на второй вход схемы И 6 поступает команда «ШАССИ». После этого на выходе схемы И 6 появляется сигнал, переключающий коммутатор 7, который замыкает свой нормально-разомкнутый контакт и подключает ко второму входу сумматора 1 формирователь фиксированного значения угла 8, состоящий из задающего устройства 9 и масштабирующего звена 10. Одновременно от второго входа сумматора 1 через коммутатор 7 отключается сигнал управления. После этого привод удерживает пушку на фиксированном угле до момента снятия команды «ШАССИ» или поступления через коммутатор 7 сигнала управления, обеспечивающего наведение пушки вверх.
Таким образом, исключается колебательный режим при наведении пушки ниже допустимого уровня при поступлении команды «ШАССИ», что исключает негативное влияние колебаний пушки на процесс посадки вертолета.
Предлагаемое техническое решение проверено математическим моделированием, а также экспериментальной проверкой макетного образца привода. Результаты проверок подтвердили исключение колебательного режима при наведении пушки ниже допустимого уровня при поступлении команды «ШАССИ», что повышает качество пилотирования вертолета с выпущенными шасси и улучшает качество обслуживания следящего привода на земле.
Следящий привод, содержащий последовательно соединенные сумматор, усилитель, исполнительный привод и датчик углового положения нагрузки, выход которого соединен с первым входом сумматора, причем выход исполнительного привода является выходом следящего привода, а также последовательно соединенные компаратор, схему И и коммутатор, управляющий вход которого соединен с выходом схемы И, первый вход компаратора соединен с выходом датчика углового положения нагрузки, на второй вход компаратора подается опорное напряжение, а на второй вход схемы И поступает команда «ШАССИ», отличающийся тем, что в него введен формирователь фиксированного значения угла, выход которого соединен с нормально-разомкнутым входом коммутатора, сигнал управления подключен к нормально-замкнутому входу коммутатора, а выход коммутатора соединен со вторым входом сумматора.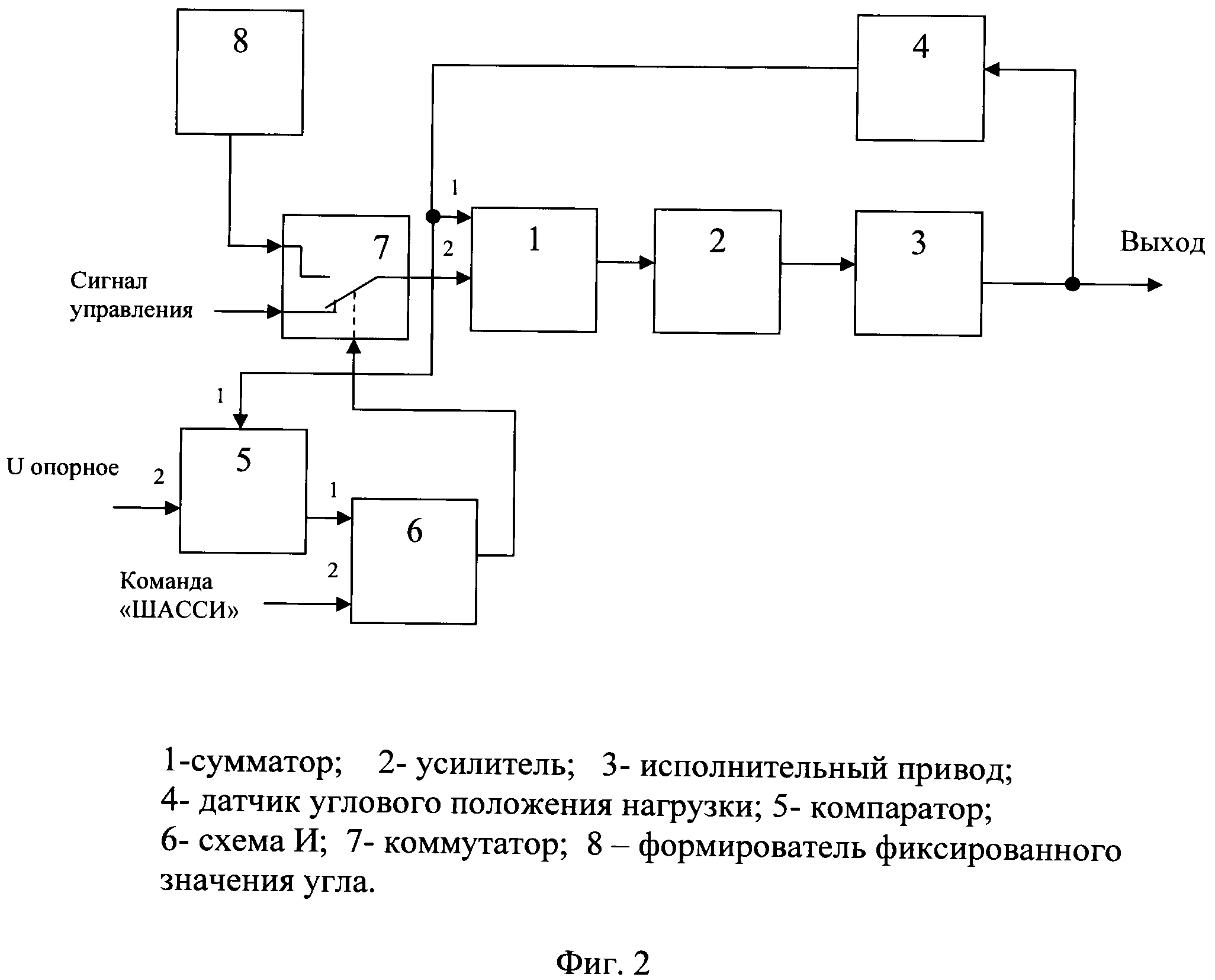
Маслосистема редуктора вертолёта с резервированием контуров смазки и охлаждения
Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты
Электромеханический преобразователь для электропривода вертикального перемещения регулирующего органа
Система передачи ответственной информации о маршрутах приема/отправления и кодах алс
Автономный пункт счета осей
Электрогидравлический привод
Электрогидравлическая система управления
Ретрактор тканей для эндоскопической увеличивающей маммопластики
Усилитель мощности
Следящий привод
Синхронная машина

