Результат интеллектуальной деятельности: ПЕРЕСТРАИВАЕМЫЙ ГЕНЕРАТОР СВЧ
Вид РИД
Изобретение
Изобретение относится к области радиотехники, в частности к генераторам СВЧ с механической перестройкой частоты, и может быть использовано в аппаратуре РЛС, в которых для повышения помехоустойчивости применяется передатчик на перестраиваемом магнетроне.
Предложение может быть использовано также в системах управления и механизмах с монотонно изменяющейся нагрузкой и силовым замыканием кинематических пар.
В современных РЛС продолжают широко использоваться передатчики на магнетронах с механической перестройкой частоты, имеющие значительно меньшие массу, габариты и потребление, чем передатчики на усилительных цепочках. Перестройка частоты магнетрона обычно производится путем перемещения в вакуумированной резонансной системе (анодном блоке) магнетрона индуктивных или емкостных элементов, связанных с гибкой вакуумной диафрагмой, которая в процессе перестройки упруго деформируется (прогибается) нажимным устройством. Это устройство может быть выполнено в виде механизма перемещения типа ″винт-гайка″ с неподвижной гайкой и ходовым винтом, как в первых перестраиваемых магнетронах (Д. Фиск и др. Магнетроны. M., ″Сов. радио″, 1948, с. 176, 179) или с вращающейся гайкой, например, в перестраиваемом магнетроне по пат. США №4531104 (опубл. 23.07.1985, Н03В 9/10, H01J 25/50).
При необходимости обеспечить быструю циклическую перестройку преимущественно применяются механизмы, в которых деформация диафрагмы производится с помощью вращающегося эксцентрика или дискового кулачка двукратного действия, воздействующего на эту диафрагму (обычно через промежуточный шток-толкатель). При этом упругая мембрана, являющаяся гибкой вакуумной диафрагмой, выполняет также роль возвратной силовой пружины, замыкающей кинематическую цепь.
Известно устройство для генерирования колебаний СВЧ-диапазона с механической перестройкой, содержащее корпус, магнетрон с подвижным штоком перестройки и вал с установленным на нем дисковым кулачком, упирающимся в шток магнетрона. Вал кулачка приводится во вращение электродвигателем через промежуточный вал с шестерней, подвижно соединенной с валом кулачка. (Помехозащищенная аппаратура АЗП-4. Руководство службы. М., Воениздат, МО СССР, 1954).
Аналогичный кулачковый механизм используется в принятом за прототип перестраиваемом генераторе СВЧ, также содержащем корпус, магнетрон с подвижным штоком и вал с кулачком двукратного действия, который приводится во вращение электродвигателем через электромагнитную фрикционную муфту; на валу электродвигателя установлено инерционное тело (авт. свид. №1840977 по заявке №2228405/25 от 05.12.1977, H01J 25/58, G01P 3/18).
Известны и другие варианты таких механизмов, например, поршневое настроечное устройство для СВЧ-генератора (пат. США №4247828, Н03В 9/10, опубл. 27.01.1981, приоритет Италии от 03.07.1978), в котором линейное перемещение настроечного элемента осуществляется путем преобразования вращательного движения вала с эксцентриком с помощью охватывающего ведомого кольца и связанной с ним двумя натянутыми эластичными элементами скобы, одно из плеч которой жестко соединено с настроечным элементом.
В известных вариантах механизм перестройки и силовой привод (обычно электромотор) должны обеспечить смещение мембраны (или перемещение связанного с мембраной штока) в заданном диапазоне с преодолением силы ее противодействия деформации, изменяющейся в широких пределах - от минимальной при нижнем положении штока, соответствующем разгруженному состоянию мембраны, до максимальной при верхнем положении штока и наибольшей деформации мембраны.
При этом максимальная величина усилия на шток у большинства отечественных магнетронов составляет 30÷40 кг при диапазоне перемещения штока ≈4÷8 мм. (″Электровакуумные приборы″, Справочник. Кн. IV, Магнетроны, ЭЛТ, ЭОП. ВНИИ ″Электростандарт"″, МЭП, 1980, секретно). Минимальное усилие на штоке обычно порядка единиц кг, так что величина перепада усилия может быть до 5÷6. Например, у магнетрона МИ-207 (см. указанный справочник) при ходе штока 8,5 мм максимальное усилие составляет 40 кг, а минимальное (при котором начинается движение штока) может быть 7,5 кг. Величина вращающего момента на валу кулачка двукратного действия, необходимого для перемещения штока вблизи его верхнего положения, при этом будет около 11 кг. см. Для магнетрона МИ-146 (ход штока 4,5 мм, усилие на шток 25-30 кг) максимальный вращающий момент при подъеме штока может быть до 3÷4 кг. см.
У некоторых магнетронов механизм перестройки входит в их состав и в качестве требования к сопрягаемому приводному устройству указывается максимальный вращающий момент. Так, для магнетрона МИ-121 максимальный вращающий момент при перестройке может быть до 10 кг. см (скорость перестройки 3 цикла/сек); для магнетрона МИ-383 максимальный момент - до 30 Нсм (~3 кг. см). Для быстрой перестройки магнетронов с такими механизмами требуется достаточно мощный двигатель.
В случае работы в режиме непрерывной перестройки без реверсирования двигателя (c кулачком двукратного действия) как это имеет место, например, в вышеупомянутой аппаратуре АЗП-4, ввиду знакопеременности момента (при подъеме и опускании штока) можно использовать относительно маломощный приводной двигатель с инерциальным звеном, роль которого в ряде случаев выполняет ротор двигателя.
Однако, при необходимости ступенчатой быстрой перестройки с установкой частоты магнетрона (т.е. штока перестройки) в определенные дискретные точки, (например, задаваемые анализатором текущей помеховой обстановки) требования к мощности привода значительно возрастают. При этом следует учитывать также инерционные нагрузки, возникающие в кулачковом механизме и передаточных звеньях, однако они, обычно (при рациональной конструкции) ниже, чем максимальный момент на валу кулачка, обусловленный реакцией возвратной пружины (мембраны) магнетрона. Например, для стального кулачка со средним диаметром 13-15 мм и шириной 5-7 мм при средней скорости перестройки 1000°/сек (три перестройки на полный диапазон при кулачке однократного действия) и времени разгона ≈60÷100 мс инерционный момент, в среднем будет около 0,4÷0,6 кгсм, что в несколько раз меньше максимального момента на валу кулачка механизма перестройки вышеупомянутого магнетрона МИ-146, необходимого для подъема штока вблизи его верхнего положения.
Таким образом, для осуществления быстрой перестройки частоты магнетрона, особенно в участках диапазона, соответствующих верхнему положению штока, необходимо использовать достаточно мощные двигатели, что приводит к резкому возрастанию массы и габаритов электропривода, которое в ряде случаев может оказаться неприемлемым. Например, шаговый двигатель ДШ 0,25 А, имеющий массу около 1 кг (ОСТВ 16.0.512.043-80) может обеспечить поворот вала кулачка с моментом 2,5÷3 кг. см лишь со скоростью не более (200÷250)о/сек, т.е. менее одной перестройки в секунду. Для реализации перестройки со скоростью, требуемой из условий помехозащиты и соответствующей техническим возможностям магнетронов, приведенных в указанном справочнике (до 3÷5 циклов/сек) необходимо было бы использовать в несколько раз более мощный двигатель, но он по массе, габаритам и потреблению оказывается соизмеримым с самим передатчиком, а столь значительное увеличение этих параметров обычно недопустимо. Приведенные обстоятельства ограничивают достижимое быстродействие перестройки передатчиков бортовой радиолокационной аппаратуры на определенные фиксированные значения частоты при работе в быстроизменяющейся помеховой обстановке.
В принятом за прототип перестраиваемом генераторе СВЧ (авт. свид. №1840977 по заявке №2228405/25) для обеспечения возможности быстрой ступенчатой перестройки частоты с фиксацией ее после окончания перестройки используется привод, содержащий инерционный аккумулятор энергии (маховик) на валу постоянно работающего электродвигателя, и электромагнитная муфта для подключения вала кулачка двукратного действия к приводу с аккумулятором энергии на время перестройки. Прототип содержит корпус, магнетрон с подвижным штоком перестройки, промежуточный вал с шестерней, подвижно соединенный с валом кулачка, упирающегося в шток магнетрона, и электродвигатель, вал которого находится в зацепление с шестерней промежуточного вала. Для повышения скорости перестройки по фиксированным значениям частоты в него введено вращающееся тело, укрепленное на валу электродвигателя, шестерня установлена с возможностью свободного вращения, введены соосно с промежуточным валом подпружиненный относительно него вдоль оси и соединенный с ним фрикционный диск, упирающаяся в него электромагнитная муфта и фрикционный упор, укрепленный в корпусе и расположенный между диском и муфтой. Электродвигатель постоянно вращает тело-аккумулятор энергии; в отсутствие команды на перестройку вал кулачка расцеплен с приводом и заторможен посредством фрикционного диска, который в этом состоянии прижат к фрикционному упору. При необходимости изменения настройки генератора на электромагнитную муфту подается управляющий импульс тока, при этом вал кулачка растормаживается и подключается с помощью муфты через промежуточный вал и шестерню к приводному электродвигателю с вращающимся телом на его оси на время длительности управляющего импульса. За это время кулачок поворачивается на некоторый угол и производит соответствующее перемещение штока, в результате чего изменяется настройка магнетрона. По окончании управляющего импульса вал кулачка расцепляется с приводом и тормозится (фиксируется) фрикционным упором, что исключает возможность его поворота под воздействием вибрационных нагрузок и возвратной пружины магнетрона.
Принятый за прототип перестраиваемый генератор СВЧ позволяет производить быструю скачкообразную перестройку частоты с преодолением силы возвратной пружины магнетрона и сил инерции за счет кинетической энергии вращающегося тела и ротора постоянно работающего приводного электродвигателя. Однако при этом не решается полностью задача совместного обеспечения быстроты перестройки и возможности точной установки требуемой частоты генератора в связи с ограничениями, обусловленными используемым в этом техническом решении кулачковыми механизмом двукратного действия (с постоянным нереверсируемым вращением приводного электродвигателя) и электромагнитной муфтой с фрикционным сцеплением и тормозом.
При кулачке двукратного действия как величина частотного скачка, так и направление изменения частоты, зависят не только от длительности управляющего импульса (т.е. времени подключения механизма перестройки к приводу), но и от исходного положения настройки, в зависимости от которого одинаковый управляющий импульс может привести к увеличению или к уменьшению частоты, к большей или меньшей величине частотного скачка (и даже к возвращению в исходную точку настройки по частоте), а для смещения в близко расположенную, но находящуюся в ″обратном″ направлении (относительно направления вращения кулачка) точку настройки может оказаться необходимым произвести почти полный оборот кулачка, что снижает результирующее быстродействие перестройки. Кроме того, ввиду разброса времени срабатывания и торможения муфты в условиях эксплуатации, интервал времени между моментом действительной остановки и фиксации положения кулачка и штока перестройки и моментом окончания управляющего импульса, и соответствующий этому выбег частоты могут варьировать, что дополнительно снижает возможную точность установки заданного значения частоты. Надо заметить также, что при кулачке двукратного действия величина максимального противодействующего момента примерно в два раза больше, чем при кулачке однократного действия.
Указанные недостатки ограничивают достижимые точность и быстродействие перестройки частоты в прототипе, особенно при необходимости быстрой и точной перестройки частоты на задаваемые значения, и оставляют актуальной задачу изыскания технического решения, обеспечивающего возможность такой перестройки без применения приводных двигателей с мощностью, соответствующей предельным значениям нагрузка на штоке магнетрона.
Целью предложений является уменьшение величины и диапазона изменения момента нагрузки на валу кулачка и тем самым снижение необходимой для перестройки мощности привода.
Указанная цель достигается тем, что в перестраиваемый генератор СВЧ, содержащий корпус, установленный на корпусе магнетрон с упругим элементом перестройки (мембраной) и связанным с ней подвижным штоком (толкателем), и укрепленный на установленном в корпусе валу дисковый кулачок, к поверхности которого упомянутый толкатель прижат мембраной магнетрона, а также второй, установленный в корпусе вал и зубчатое колесо, введены установленный на втором валу зубчатый сектор, сцепленный с упомянутым зубчатым колесом и снабженный эксцентрично установленным (на расстоянии r от центра сектора) пальцем, и силовой элемент, например, в виде упругого звена (пружины или подпружиненного рычага), включенный между этим пальцем и корпусом.
При этом зубчатое колесо закреплено на валу кулачка, а сектор нагружен упомянутым силовым элементом (упругим звеном) в направлении к центру вращения при начальном угловом положении сектора и связанного с ним кулачка, соответствующем нижнему положению толкателя и разгруженному состоянию мембраны магнетрона. При диапазоне углов поворота вала кулачка однократного действия порядка (1,7-1,9)π передача зубчатое колесо - сектор может быть выполнена понижающей, а силовой элемент в виде упругого звена может представлять собой одноплечий подпружиненный рычаг (рычаг второго рода) с переменным плечом силы давления рычага на палец сектора, причем это плечо (расстояние между расположенной на корпусе точкой опоры рычага и точкой его взаимодействия с пальцем) максимально при начальном угловом положении сектора и кулачка, соответствующем нижнему положению толкателя, а длина его в начальном положении l0 выбрана из условия l0/r≥2÷2,5.
Сущность предложения заключается в том, что сочетание вышеперечисленных дополнительных элементов, соединенных указанным образом между собой и связанных с валом кулачка, обеспечивает создание приложенного к валу кулачка вращающего момента, возрастающего при перемещении толкателя (штока) кулачком в верхнем направлении (т.е. при увеличении силы противодействия мембраны и, как следствие этого, силы давления штока на кулачок и величины вызываемого этим момента на кулачке) и направленного в противоположную сторону относительно момента, обусловленного противодействием мембраны магнетрона.
Путем рационального выбора параметров пружины, рычага и передачи ″зубчатое колесо - сектор″, в частности, при соблюдении условий l0/r≥2÷2,5 (где l0 - плечо силы давления рычага на палец в начальном положении, r - расстояние от центра вращения сектора до пальца) и уменьшения силы воздействия пружины при максимальном отклонении рычага не более чем на 20%, можно сделать весьма близкими формы зависимостей этих моментов от угла поворота вала, так что результирующий момент нагрузки будет значительно (в 6-8 и более раз) уменьшен относительно максимального момента (при крайнем верхнем положении штока) для данного магнетрона.
Состав и работа устройства и пути выбора параметров его элементов для минимизации входного вращающего момента поясняются приведенными ниже описанием и графическими материалами.
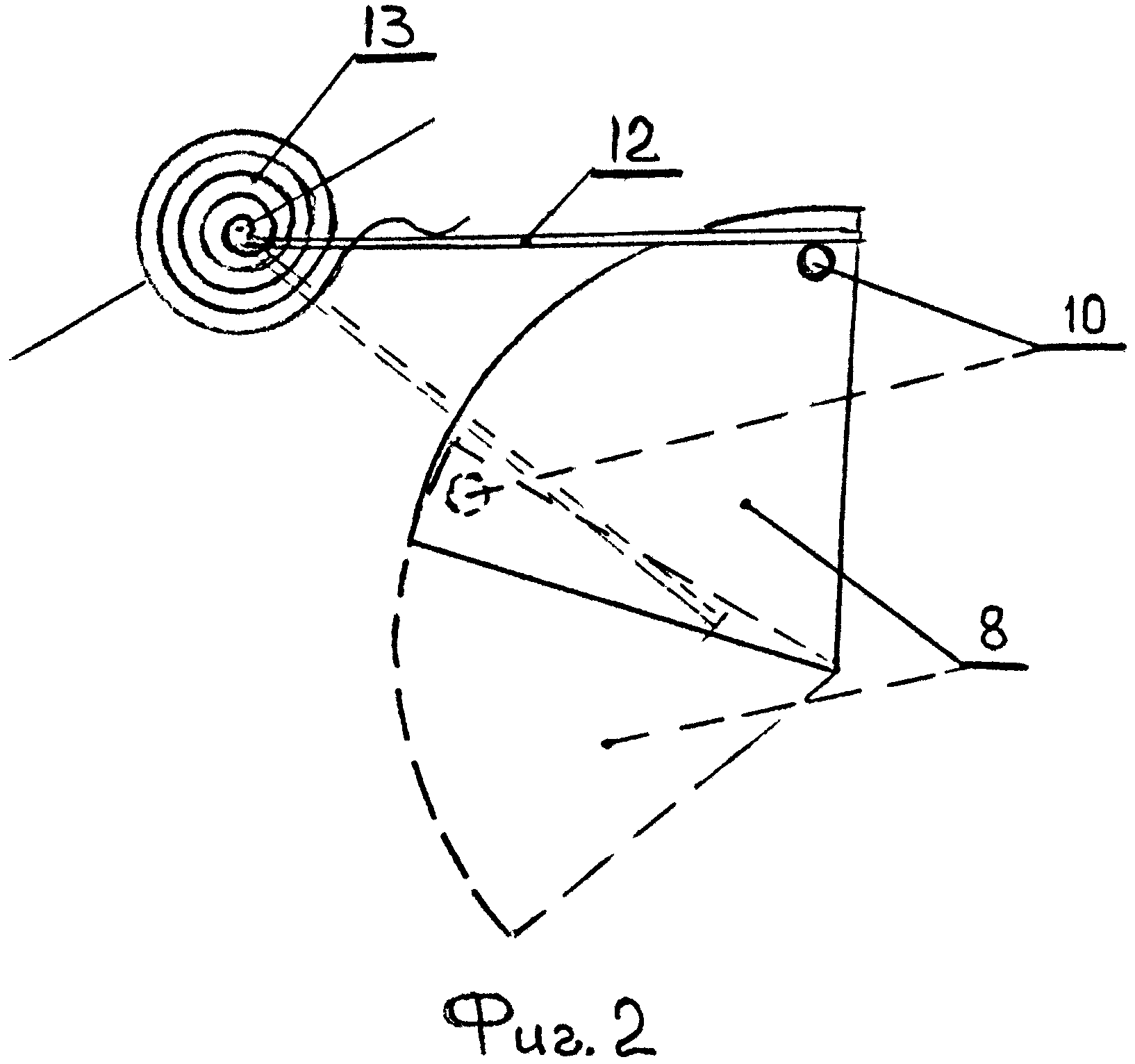
На фиг. 1 схематически представлено предлагаемое устройство; на фиг. 2 приведен вариант выполнения устройства с упругим звеном в виде подпружиненного рычага и схема действия рычага на сектор; на фиг. 3 представлена схема действия рычага через палец на сектор; на фиг. 4 показаны графики зависимостей величин компенсируемого и компенсирующего моментов от угла поворота при разных параметрах рычага и пружины.
Устройство содержит укрепленный на корпусе 1 магнетрон 2 с упругой мембраной 3 и связанным с ней штоком 4, который упирается (обычно через промежуточный ролик) в кулачок однократного действия 5, установленный на валу 6. На этом валу (6) установлено также зубчатое колесо 7, находящееся в зацеплении с зубчатым сектором 8, установленным на втором валу 9 и имеющим на боковой поверхности палец 10, удаленный от центра вращения на расстояние r. Между пальцем 10 и корпусом 1 включен силовой элемент 11, например, в виде упругого звена, образованного рычагом 12 со спиральной пружиной 13. При начальном положении валов 9 и 6 и укрепленных на них сектора 8, колеса 7 и кулачка 5, соответствующем нижнему положению толкателя 4 и разгруженному состоянию мембраны 3 магнетрона 2, силовой элемент 11 (рычаг 12 с пружиной 13) нагружает сектор 8 (через палец 10) в направлении к его центру вращения, в результате чего плечо силы, с которой подпружиненный рычаг 12 воздействует на сектор (длина перпендикуляра из центра вращения сектора на линию действия этой силы, приложенной к пальцу 10), близко к нулю (при точно радиальном направлении силы - равно нулю). Соответственно близки к нулю тангенциальная составляющая силы давления рычага 12 на сектор 8 и обусловленный ею вращающий момент на валах 9 и 6.
Таким образом, в начальном положении на подключаемом к приводу валу 6 отсутствуют нагрузки (моменты) как от реакции мембраны 3 магнетрона 2, так и от силового элемента 11. Рассмотрим взаимодействие элементов устройства при перестройке генератора из начального положения на какую-либо частоту в диапазоне перестройки.
При перестройке приводом вала 6 на заданный угол, соответствующий требуемому перемещению толкателя (штока перестройки) 4 кулачком 5 однократного действия, происходит упругая деформация мембраны 3 и возникает усилие на штоке 4, приложенное к поверхности кулачка 5 (обычно - через ролик на конце штока, катящийся по поверхности кулачка при его повороте). За счет тангенциальной составляющей воздействующего на кулачок 5 усилия к валу 6 оказывается приложенным момент, противодействующий повороту кулачка 5 в направлении соответствующем подъему штока 4 и увеличению деформации мембраны 3. Одновременно с поворотом кулачка 5 поворачивается также зубчатое колесо 7 и сцепленный с ним сектор 8. При рабочем диапазоне углов кулачка однократного действия 5 около (1,7÷1,9)π передача ″зубчатое колесо - сектор″ выполнена понижающей в 4-6 раз, так что полный угол поворота сектора 8, соответствующий выводу штока 4 в верхнее положение, будет около 60°. При повороте кулачка 5 из начального положения в заданное и соответствующем повороте сектора 8 палец 10, который в начальном положении был нагружен элементом 11 (в частности, рычагом 12 с пружиной 13) в направлении к центру вращения сектора 8, смещается, в результате чего линия действия силы элемента 11 (или силы давления рычага 12 на палец 10) отклоняется от центра сектора 8 и возникает вращающий момент, направленный по ходу вращения сектора 8 и связанного с ним зубчатого колеса 7 вала 6. Этот момент противоположен по направлению моменту на том же валу 6, обусловленному приложенной к поверхности кулачка 5 (через шток 4) силой противодействия мембраны 3 магнетрона 2.
Выбором параметров силового элемента 11, в частности, начальной длины рычага 12 (l0) и силы пружины 13, можно достичь близкой к линейному закону зависимости величины компенсирующего момента от угла поворота сектора 8 (для случая, когда профиль кулачка 5 близок к арифметической спирали, что обычно имеет место). Для силового элемента в виде упругого звена, образованного рычагом 12 с пружиной 13 (палец 10 при этом может быть выполнен в виде ролика на оси), зависимость величины компенсирующего момента Мк от угла (θ) поворота сектора 8 относительно начального положения может быть на основании схемы (Фиг. 3) действия рычага 12 через палец 10 на сектор 8, представлена в виде
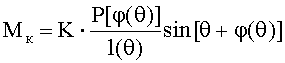 , где
, где
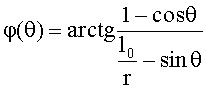 ;
; 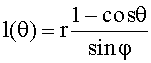 ;
;
l0 = длина плеча рычага 12 (плеча силы, приложенной к пальцу 10) в начальном положении,
θ - угол поворота сектора 8 от начального положения,
r - расстояние от центра вращения сектора 8 до пальца 10,
K - размерный коэффициент,
P[φ(θ)] - сила давления рычага 12 на палец 10, обусловленная пружиной 13 и зависящая от величины ее хода, определяемой углом φ отклонения рычага 12 от начального положения.
При соблюдении предусмотренных условий - максимальной величины плеча l0 рычага 12 в начальное положении (что обеспечивается нахождением точки опоры этого рычага относительно сектора 8 в той стороне, куда перемещается палец 10 при выходе устройства из начального положения) и выполнении соотношения l0/r≥2÷2,5 (при котором угол φ поворота рычага 12 и, соответственно, ход пружины 13 еще невелики и сила давления пружины уменьшается незначительно - не более чем на 15-25%) достигается достаточно близкая к линейной зависимость компенсирующего момента от угла поворота θ. Для представленных на фиг. 4 графиков 14 и 15, рассчитанных по приведенной выше формуле и соответствующих начальном длинам рычага 12 l0/r=2 и 2,5, величина разности между противодействующим (линейно возрастающим) моментом, обусловленным реакцией мембраны магнетрона, и компенсирующим моментом, образованным тангенциальной составляющей силы давления подпружиненного рычага 12 переменной длины на сектор 8 (через палец 10) составляет около 7,9% при l0/r=2 и ~6,1% при l0/r=2,5 от максимального значения противодействующего момента. При этом предполагалось, что величина силы давления пружины 13 на рычаг 12 при его наибольшем отклонении (при l0/r=2 и φмакс≈24°) уменьшается на ~25%. Для иллюстрации возможности еще лучшей линеаризации зависимости компенсирующего момента от угла поворота θ на фиг. 4 приведен график 16, соответствующий случаю l0/r=2,5 и уменьшению силы давления пружины в крайнем положении на ~12%. Как видно, он близок к линейному; расчетная величина отклонения от линейности (максимальная величина ″недокомпенсации″ и ″перекомпенсации″) составляет всего около 4% от максимального значения.
В реальных условиях за счет возможного отклонения закона изменения противодействующего момента от линейного, неточности начальной установки требуемого усилия пружины 13 и некоторых других факторов результирующая величина ″остаточного″ момента нагрузки на валу 6 будет больше, но и при этом достижимая степень уменьшения максимальной нагрузки на входе вала кулачка может быть достаточно большой - около 5÷6 раз (в том числе с учетом момента инерции колеса 7 и сектора 8, выполняемых из алюминиевых сплавов типа Д16Т или В95Т). Это позволяет существенно снизить требуемую для перестройки мощность привода, вследствие чего становится возможным реализовать быструю и точную перестройку частоты СВЧ генератора, в частности, с применением следящего привода в бортовой аппаратуре. Например, для быстрого управления и точной установки частоты бортовых радиолокационных передатчиков на магнетронах с усилиям на штоке до 2+3 кГ с помощью следящей системы, управляемой анализатором текущей помеховой обстановки, при использовании предлагаемого технического решения можно применить следящий привод на упоминавшемся выше двигателе ДШ0,25А, имеющем приемлемые массогабаритные характеристики и энергопотребление.
При использовании известных решений приходилось поступаться либо скоростью перестройки, либо точностью установки (как в прототипе), либо массогабаритными характеристиками и потреблением; последнее оказывалось практически неприемлемым для бортовой аппаратуры. Полезный технический эффект от применения предложения заключается в повышении тактико-технических характеристик бортовых радиолокаторов с передатчиками на выполненных согласно предложению перестраиваемых магнетронных генераторах, в частности показателей помехозащищенности при работе в сложной помеховой обстановке. Условную оценку локального экономического эффекта можно было бы произвести путем сравнения затрат при производстве и эксплуатации перестраиваемого передатчика с требуемым быстродействием и точностью при использовании предложения и выполненного известным путем - с применением более мощного следящего привода, (например, с двигателем ДШ-4А) с учетом стоимости, надежности и потребления привода в том и другом варианте и затрат на производство дополнительно введенных согласно предложению механических элементов и деталей. Однако ввиду гипотетического характера объекта сравнения в этом случае (такой следящий привод, как уже отмечалось, оказывается сравнимым с самим передатчиком и даже превышающем его по массе габаритам и потреблению и практически не может быть использован в бортовой аппаратуре) представляется более уместным ограничиться сравнительной оценкой технического эффекта - повышения быстродействия точной перестройки при использовании в следящей системе двигателя того же типа, соответствующее указанному выше уменьшению момента на валу кулачка (в 6-8 раз) или повышения точности установки требуемого значения частоты по сравнению с прототипом (величина скачка частоты у прототипа согласно описанию может быть от 20 до 100 мГц, в то время как предлагаемый генератор обеспечивает возможность реализации следящей системы управления с шаговым двигателем и точной установкой около 50-70 дискретных значений частоты, что применительно к прототипу соответствует величине скачка 4÷7 МГц, т.е. в среднем в 5÷15 раз точнее).
Предлагаемое техническое решение разработано на этапе эскизного проектирования радиолокационной системы, в которой предполагается его использовать. При этом были выполнены необходимые расчеты, проработано построение механизма перестройки и следящей системы и произведены экспериментальные проверки лабораторных макетов отдельных элементов, подтвердившие реализуемость и эффективность предложения. Предлагаемый перестраиваемый генератор СВЧ позволяет за счет значительного снижения требуемой мощности привода обеспечить в бортовой аппаратуре совместное выполнение необходимых для помехозащиты быстродействия и точности перестройки частоты, что должно значительно улучшить тактико-технические характеристики проектируемого радиолокатора при работе в сложной помеховой обстановке.
Разработку технической документации планируется произвести на следующем этапе проводимой опытно-конструкторской работы.
Цифровой обнаружитель пачек периодических импульсных сигналов
Устройство для управления антенной корабельной радиолокационной станции по курсовому углу
Устройство пеленгования и анализа сигнала импульсных рлс с коммутационным объединением приемных каналов
Бортовая станция определения координат движущихся источников излучения
Устройство управления частотной настройкой приемника
Устройство для обработки сигналов радиолокационного маяка-ответчика
Цифровое устройство когерентной обработки
Имитатор радиолокационной цели
Селектор-обнаружитель пачек периодических импульсных сигналов
Анализатор радиопомех

