Результат интеллектуальной деятельности: ЦИФРОВОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ ОБРАБОТКИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиолокационной техники, в частности к цифровым устройствам обработки радиолокационных сигналов, и может быть использовано в РЛС обнаружения движущихся целей.
В состав аппаратуры селекции движущихся целей (СДц) обычно входят устройства определения частотных или фазовых различий отраженных сигналов относительно опорного когерентного сигнала, устройства запоминания и череспериодного сравнения принимаемых сигналов и устройства компенсации радиальной составляющей собственного движения носителя РЛС, и/или скорости ветра и движения цели (в выбранных интервалах скорости). Исторически первым и имеющим широкое распространение до настоящего времени является выполнение всех или большей части этих устройств на базе аналоговой техники (например, варианты аппаратуры СДц, описанные на стр.240-252 книги Г.М. Вишина "Селекция движущихся целей", Воениздат, М., 1966, устройство СДц по авт. свид. СССР №349964, пат. ФРГ №1258924, пат. Великобритании №1118991).
Для повышения технических показателей работы СДц, в частности, стабильности работы и качества селекции, а также для снижения весогабаритных характеристик, унификации схемного выполнения и упрощения настройки и эксплуатации аппаратуры в последнее время получают преимущественное применение цифровые методы обработки сигналов в аппаратуре СДц и выполнение ряда устройств этой аппаратуры на базе дискретной техники.
В первую очередь цифровые устройства были применены для реализации операций запоминания и череспериодного сравнения (например, пат. США №3715751, английский пат. №1291239).
Применение цифровой обработки сигналов для СДц в РЛС AN/TPS-43 ("Электроника" У.40. 1 21, 1967, стр.111-117) позволило построить все устройства обработки сигналов после фазового детектора на дискретных схемах, что, как указывается в вышеназванном источнике, повысило качество работы СДц за счет исключения нестабильностей, свойственных аналоговым схемам задержки и сравнения.
Дальнейшее повышение точностных характеристик за счет исключения погрешности при последовательных преобразованиях сигналов "разность фаз - напряжение" (на фазовых детекторах) и "напряжение - код" (с помощью соответствующих аналогово-цифровых преобразователей) достигается в цифровом устройстве, в составе которого наряду с дискретными схемами обработки (запоминания и череспериодного сравнения) имеются цифровые импульсные фазометры. Однако схемы когерентного гетеродина и, частично, компенсации движения (путем внесения частотных и/или фазовых коррекций в опорный сигнал) при этом остаются аналоговыми, что ограничивает возможность снижения соответствующих составляющих нестабильностей опорного и корректирующих сигналов и унификации построения этих схем с устройствами последующей обработки. Указанные недостатки особенно существенны для РЛС с внутренней когерентностью, где когерентный сигнал обычно создается в результате синфазирования опорного генератора зондирующим сигналом передатчика, преобразованным на промежуточную частоту, как это имеет место в большинстве ранее указанных примеров. При этом создание опорного генератора, удовлетворяющего противоречивым требованиям быстроты и точности фазирования внешним сигналом и высокой стабильности сохранения навязанной фазы колебаний представляет собой сложную техническую задачу. Для иллюстрации можно указать, например, на когерентный генератор по заявке ФРГ №2149921, (см. также пат. США №3483558, статью В.Н. Векслина и др. "О выборе оптимальной схемы фазируемого автогенератора" - ВСРЭ серия XIV, вып.4, 1963 г., ИСЛ №№018458 и 019092).
Схема создания сигналов коррекции собственного движения или движения цели при аналоговом выполнении также имеет достаточно сложную структуру (см., например, схему компенсации ветра или защиты от пассивных помех в аппаратуре СДц типа МА 371 фирмы CSF на стр.247 вышеупомянутой книги Г.М. Вишина).
Применение цифровой обработки несколько упрощает выполнение схемы коррекции, но не позволяет полностью исключить аналоговые элементы. Так, в устройстве подавления сигналов от местных предметов (акц. заявка ФРГ №2141589) с цифровым построением управляющего устройства, коррекция фазы когерентного гетеродина, фазируемого зондирующим сигналом, осуществляется фазовращателем с цифровым управлением. Применение аналоговых элементов - фазируемого когерентного гетеродина и фазовращателя не позволяет в полной мере реализовать преимущества цифрового построения схем обработки - стабильности работы, унификации и микроминиатюризации аппаратуры; нестабильность частоты фазируемого когерентного гетеродина остается одним из факторов, ограничивающих достижимую точность определения радиальной составляющей скорости, а также качество селекции и подавления помех.
Целью предложения является упрощение выполнения устройства когерентной обработки СДц в РЛС с внутренней когерентностью при одновременном повышении точности и унификация схемных решений аппаратуры обработки, что создает возможность комплексной микроминиатюризации и снижения весогабаритных и стоимостных характеристик устройств СДц. При предлагаемом построении устройства обработки достигается также повышение качества компенсации помех за счет повышения быстродействия устройства коррекции, позволяющего осуществить раздельную коррекцию на смежных элементах дальности.
В предлагаемом устройстве, содержащем согласно прототипу блоки запоминания и череспериодического сравнения кодов разностей фаз отраженных сигналов по элементам дальности и цифровой импульсный фазометр, входы которого подключены к опорному генератору и выходу УПЧ (источнику отраженного сигнала), работающем в составе РЛС с внутренней когерентностью, это достигается включением между выходом фазометра и входом устройства запоминания и череспериодного сравнения соединенных между собой через сумматор кода коррекции схемы запоминания кода разности фаз опорного и зондирующего сигналов и схемы сравнения кодов разностей фаз опорного и зондирующего и опорного и отраженного сигналов, выход которой подключен ко входу схемы запоминания и череспериодного сравнения, при этом входы схем запоминания и сравнения через управляемый от синхронизатора РЛС коммутатор подключены к выходу цифрового импульсного фазометра, источник опорного сигнала выполнен в виде автономного (несинхронизируемого) генератора промежуточной частоты, а выход преобразованного на промежуточную частоту зондирующего сигнала (сигнала синхронизации) подключен к сигнальному входу цифрового импульсного фазометра, к которому подключен также источник принимаемых сигналов, т.е. выход УПЧ РЛС.
Сущность предложения заключается в создании цифрового сигнала опорной фазы и определении искомых фаз отраженных сигналов путем суммирования (вычитания) кодов относительных значений фаз опорного и отраженного сигналов, что компенсирует случайный разброс начальной фазы зондирующего сигнала и позволяет исключить аналоговые устройства синхронизации опорного генератора и коррекции его частоты и/или фазы, т.е. производить все операции, обеспечивающие когерентную обработку сигналов, в цифровом виде.
Состав и функционирование предлагаемого устройства поясняются последующим описанием и приведенной на фиг.1 блок-схемой.
В состав устройства входят: цифровой импульсный фазометр 1 (ЦИФ), выполненный, например, на базе фазометрической линии с позиционно-пространственным кодированием (как в прототипе) или пространственно-интерполяционного типа (известного по разработкам Томского института автоматизированных систем управления и радиоэлектроники), сигнальный вход которого подключен к выходам УПЧ и тракта преобразованного на промчастоту зондирующего сигнала РЛС (отраженные и синхронизирующий сигналы соответственно), подключенный к другому входу фазометра опорный генератор 2 (ОГ), представляющий собой стабильный по частоте источник непрерывных колебаний с высокой кратковременной стабильностью (за время нескольких периодов зондирования РЛС), например, стабилизированный генератор на промчастоте, подключенные к выходу фазометра 1 через коммутатор 3 (К) схемы запоминания кода относительной фазы зондирующего сигнала 4 (СЗК) и вычитания кодов запомненной и текущих относительных фаз отраженных сигналов в данном такте зондирования 5 (СВК), соединенные между собой через сумматор кода коррекции 6 (СКК), и устройство запоминания и череспериодного сравнения кодов фазовых характеристик отраженных сигналов по элементам дальности 7 (ЧПС), вход которого подключен к выходу схемы вычитания 5. К управляющему входу коммутатора 3 и другому входу сумматора 6 подключены, соответственно, выходы синхронизатора РЛС и датчиков кодов коррекции. В зависимости от назначения и места установки (носителя) РЛС, в которой применяется описываемое устройство когерентной обработки, для коррекции могут использоваться сигналы, несущие информацию о текущем положении диаграммы направленности РЛС, о параметрах собственного движения носителя, сигналы коррекции для выделения целей в требуемом интервале скоростей или компенсации отражений от пассивных помех.
Устройство работает следующим образом. В начале каждого такта зондирования импульсно-модулированный сигнал передатчика, преобразованный на промчастоту, поступает на сигнальный вход фазометра 1, на второй вход которого постоянно поступает непрерывный опорный сигнал промчастоты от стабильного генератора 2. На время длительности зондирующего сигнала управляемый сигналами от синхронизатора РЛС коммутатор 3 подключает выход фазометра 1 ко входу схемы запоминания кода фазы зондирующего сигнала 4. Сформированный фазометром 1 код разности фаз зондирующего и опорного сигналов через коммутатор 3 поступает на схему 4, где он запоминается на время длительности данного такта зондирования (до начала следующего такта). После окончания зондирующего импульса по сигналу синхронизатора коммутатор 3 подключает выход фазометра 1 к схеме вычитания кодов 5, на другой вход которой через сумматор кода коррекции 6 постоянно поступает (при отсутствии сигнала коррекции) запомненный в схеме 4 код относительной фазы зондирующего сигнала.
Принятые РЛС и преобразованные на промчастоту отраженные сигналы от целей, находящихся на разных дальностях, последовательно во времени поступают с выхода УПЧ на сигнальный вход фазометра 1, формирующего коды разностей фаз этих сигналов с опорным сигналом генератора 2. С выхода фазометра 1 через коммутатор 3 эти коды в соответствующем темпе поступают на вход схемы вычитания кодов 5, осуществляющей операцию вычитания кодов запомненной и измеряемых по мере поступления отраженных сигналов от целей на различных элементах дальности разностей фаз, в результате чего исключается влияние произвольной начальной фазы зондирующего сигнала и с выхода схемы 5 на вход устройства запоминания и череспериодного сравнения 7 поступают коды, несущие информацию только о таких фазовых характеристиках принятых сигналов, изменение которых от такта к такту будет обусловлено изменением текущей дальности до целей в последовательных тактах зондирования РЛС.
При необходимости компенсации собственного движения носителя РЛС в значение запомненной начальной фазы зондирующего сигнала с помощью сумматора 6 вводится переменная поправка путем суммирования кода начальной фазы с кодом коррекции, величина изменения которого в смежных тактах зондирования определяется известным образом по скорости носителя, длительности такта, положению диаграммы направленности антенны и длине волны РЛС. Аналогичным образом может осуществляться и селекция целей по скорости. Надо отметить, что показанное на схеме фиг.1 включение сумматора не является единственно возможным; коррекцию можно вводить в коды фаз отраженных сигналов, а также при череспериодном сравнении в последующем устройстве 7.
Предлагаемое цифровое устройство когерентной обработки позволяет исключить в РЛС с внутренней когерентностью синтезируемый в каждом такте когерентный гетеродин, применив в качестве источника опорного сигнала непрерывно работающий генератор на промчастоте, что упрощает выполнение опорного генератора и повышает точность когерентной обработки за счет исключения составляющих погрешности, обусловленных случайной ошибкой синфазирования и уходами частоты (фазы) когерентного гетеродина, стабильность которого всегда меньше, чем у непрерывного стабилизированного генератора, используемого, согласно предложению, в качестве опорного. Выполнение устройств формирования и запоминания сигнала опорной фазы, а также компенсации собственного движения и скорости ветра на элементах дискретной техники позволяет более полно унифицировать построение устройств обработки и создает предпосылки для комплексной микроминиатюризации и снижения веса и габаритов аппаратуры. Кроме того, цифровая схема коррекции позволяет практически безынерционно вводить в фазовые характеристики сигналов поправки, произвольным образом изменяющиеся на любых, в том числе на смежных элементах дальности, что повышает качество селекции и возможности адаптации системы СДц в сложной обстановке и при наличии помех.
При аналоговом выполнении схем их быстродействие ограничивается временем установления процессов в элементах схемы (фильтрах, генераторах) и искажениями сигналов за счет возникновения побочных продуктов модуляции при управлении частотой или фазой за время, соответствующее дискрету по дальности (доли микросекунды).
Предложенное устройство когерентной обработки, имеющее внутренний формирователь сигнала опорной фазы, может быть выполнено (как и упоминавшаяся выше аппаратура СДц МА 371 фирмы CSF) в виде приставки, придаваемой обычной (некогерентной) РЛС; при этом в качестве источника зондирующего сигнала на промчастоте можно использовать, например, выход приемно-усилительного тракта канала автоматической подстройки частоты гетеродина РЛС.
Повышение точности определения параметров движения и селекции целей и более глубокая унификация построения аппаратуры обработки РЛС позволит повысить их тактико-технические характеристики и, тем самым, эффективность радиолокационных систем разведки и целеуказания; упрощение и унификация схемных решений создает предпосылки для снижения затрат средств и времени при изготовлении и эксплуатации аппаратуры.
Цифровое устройство когерентной обработки, содержащее цифровой импульсный фазометр, к одному входу которого подключен опорный гетеродин, а к другому - выходы приемно-усилительных трактов, преобразованных на промежуточную частоту зондирующих и отраженных сигналов, к выходу импульсного фазометра подключен соединенный с синхронизатором радиолокационной станции коммутатор на два положения, к одному выходу которого подключена схема запоминания кода разности фаз зондирующего и опорного сигналов, а к другому - схема вычитания кодов разностей фаз зондирующего и опорного и отраженного и опорного сигналов и, соединенное с выходом схемы вычитания кодов, устройство запоминания и череспериодного сравнения фазовых характеристик отраженных сигналов по элементам дальности, отличающееся тем, что, с целью повышения точности и быстродействия для раздельной компенсации помех и селекции по скорости на смежных элементах дальности, в устройство дополнительно введены последовательно соединенные формирователь кодов коррекции и сумматор кодов коррекции, при этом вход формирователя кодов коррекции соединен с навигационной системой носителя и с дополнительным выходом устройства запоминания и череспериодного сравнения, второй вход сумматора кодов коррекции соединен с выходом схемы запоминания кодов разностей фаз зондирующего и опорного сигналов, а выход - со входом схемы вычитания кодов разностей фаз зондирующего и опорного и отраженного и опорного сигналов.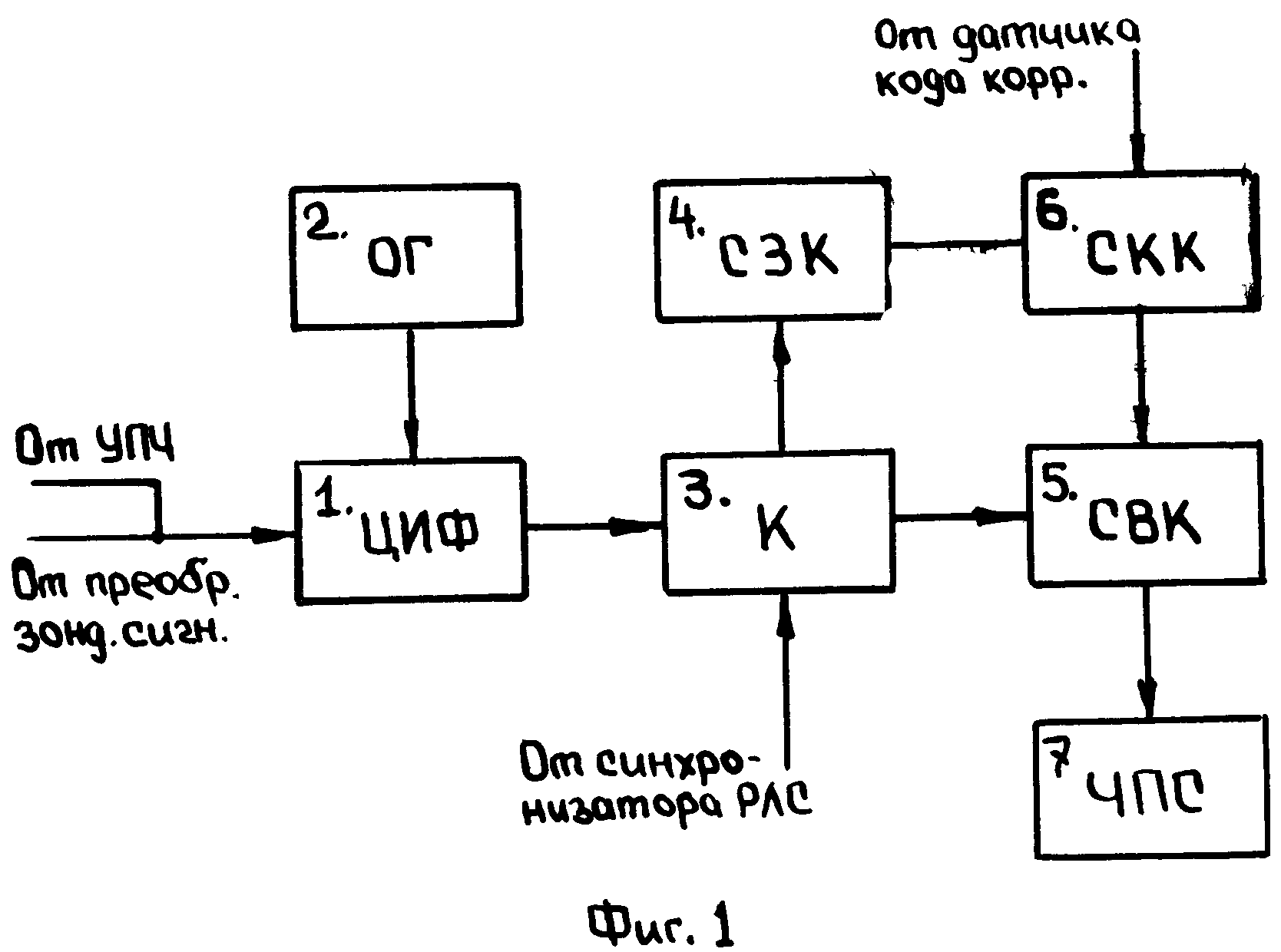
Цифровой обнаружитель пачек периодических импульсных сигналов
Устройство пеленгования и анализа сигнала импульсных рлс с коммутационным объединением приемных каналов
Перестраиваемый генератор свч
Бортовая станция определения координат движущихся источников излучения
Устройство управления частотной настройкой приемника
Устройство для обработки сигналов радиолокационного маяка-ответчика
Имитатор радиолокационной цели
Селектор-обнаружитель пачек периодических импульсных сигналов
Анализатор радиопомех
Устройство определения координат и угловой скорости обзора направленных сканирующих излучателей

