Результат интеллектуальной деятельности: Устройство для управления антенной корабельной радиолокационной станции по курсовому углу
Вид РИД
Изобретение
ВВОДНАЯ ЧАСТЬ
Изобретение относится к области автоматического управления и может быть использовано при разработке устройств управления антенн РЛС, а также промышленных систем автоматического управления.
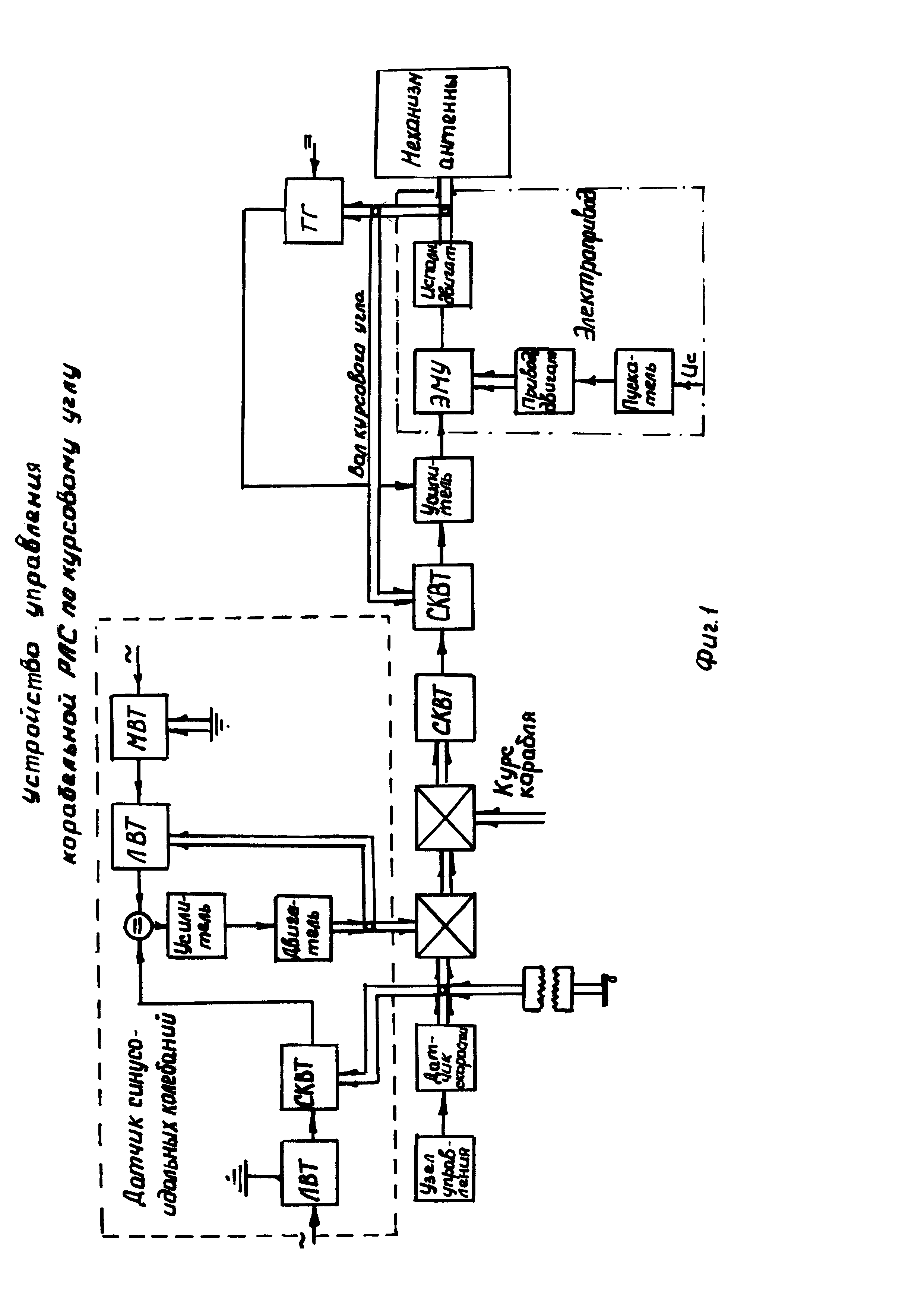
Известно устройство управления антенной корабельной РЛС, обеспечивающее ручное управление, круговое вращение и вращение антенны с замедлением (фиг.1).
Устройство состоит из узла управления, двух электромеханических блоков - датчика скорости и датчика синусоидальных колебаний, силовой следящей системы, включающей синусно-косинусный вращающийся трансформатор (СКВТ) - датчик скорости, СКВТ-датчик курсового угла (КУ), усилитель, электромашинный усилитель (ЭМУ), исполнительный двигатель и тахогенератор, и механизма антенны.
Выходные валы датчика скорости и датчика синусоидальных колебаний соединены с входными валами механического сумматора (дифференциала), выходной вал которого через второй дифференциал, где происходит суммирование с валом курса корабля (Кк), соединен с ротором СКВТ-датчика скорости.
Выходной вал первого дифференциала вращается либо с постоянной скоростью, либо по закону, определяемому суммой постоянной скорости и синусоидального колебания.
Вращение ротора СКВТ-датчика скорости от вала дифференциала отрабатывает силовая следящая система, выходной вал которой связан с осью вращения антенны. Ручное управление антенной осуществляется с помощью ручки, связанной через муфту с валом датчика скорости.
Выбор режимов осуществляется с помощью узла управления.
К недостаткам устройства следует отнести следующее:
- наличие электромеханического блока-датчика синусоидальных колебаний и механических сумматоров;
- необходимость увеличения мощности, веса и габаритов исполнительной части силовой следящей системы в режиме наложения синусоидальных колебаний на максимальную скорость кругового вращения;
- ограниченный выбор расположения ручки управления, датчиков, скорости и синусоидальных колебаний и громоздкости конструкции из-за наличия механической связи между ними и валом курса корабля;
- низкая надежность и ограниченное быстродействие силовой следящей системы из-за наличия ЭМУ.
Целью настоящего изобретения является устранение вышеуказанных недостатков и повышение помехозащищенности РЛС.
Это достигается тем, что в устройство введены СКВТ ручного управления и СКВТ-датчик Кк, роторы которых соединены с ручкой управления и валом Кк соответственно, причем напряжение питания подключено к статорной обмотке СКВТ-датчика КУ, а роторные обмотки его соединены со статорными обмотками СКВТ-датчика Кк, роторные обмотки СКВТ-датчика Кк соединены со статорными обмотками СКВТ-датчика скорости, подключенного роторными обмотками к статорным обмоткам СКВТ ручного управления, синусная обмотка которого подключена ко входу усилителя, и введены СКВТ-датчик направления замедления, формирователь импульса замедления, логический узел, ключи вращения и замедления, причем статорные обмотки СКВТ-датчика направления замедления подключены к роторным обмоткам СКВТ-датчика Кк, а роторные - ко входу формирователя импульса замедления, а выход формирователя импульса замедления и узла управления подключены на входы логического узла, выходы которого подключены на управляющие входы ключей замедления и вращения, через которые подключаются выходы узла управления ко входу датчика скорости. Кроме этого с целью управления антенной, близкого к оптимальному, и устранения ударных перегрузок в конструкции механизма антенны в режимах замедления, в устройство введены узлы торможения и разгона, входы которых подключены ко входу усилителя, а выходы - ко входам логического узла, а в силовой следящей системе применен вентильный преобразователь с насыщающимися дросселями в цепи нагрузки и линейными дросселями во вторичных обмотках трансформатора и блок управления с упреждающим токоограничением, причем выходы усилителя и тахогенератора соединены с входами блока управления, выход которого подключен ко входу вентильного преобразователя соединенного с исполнительным двигателем (авт. свид. № 291295, 347873, 368706).
Экспериментальная проверка подтвердила преимущества предлагаемого устройства перед известным. Перечень фигур на чертежах.
Сущность изображения поясняется чертежами, где:
на фиг.1 приведено известное устройство;
на фиг.2 - предлагаемое устройство.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
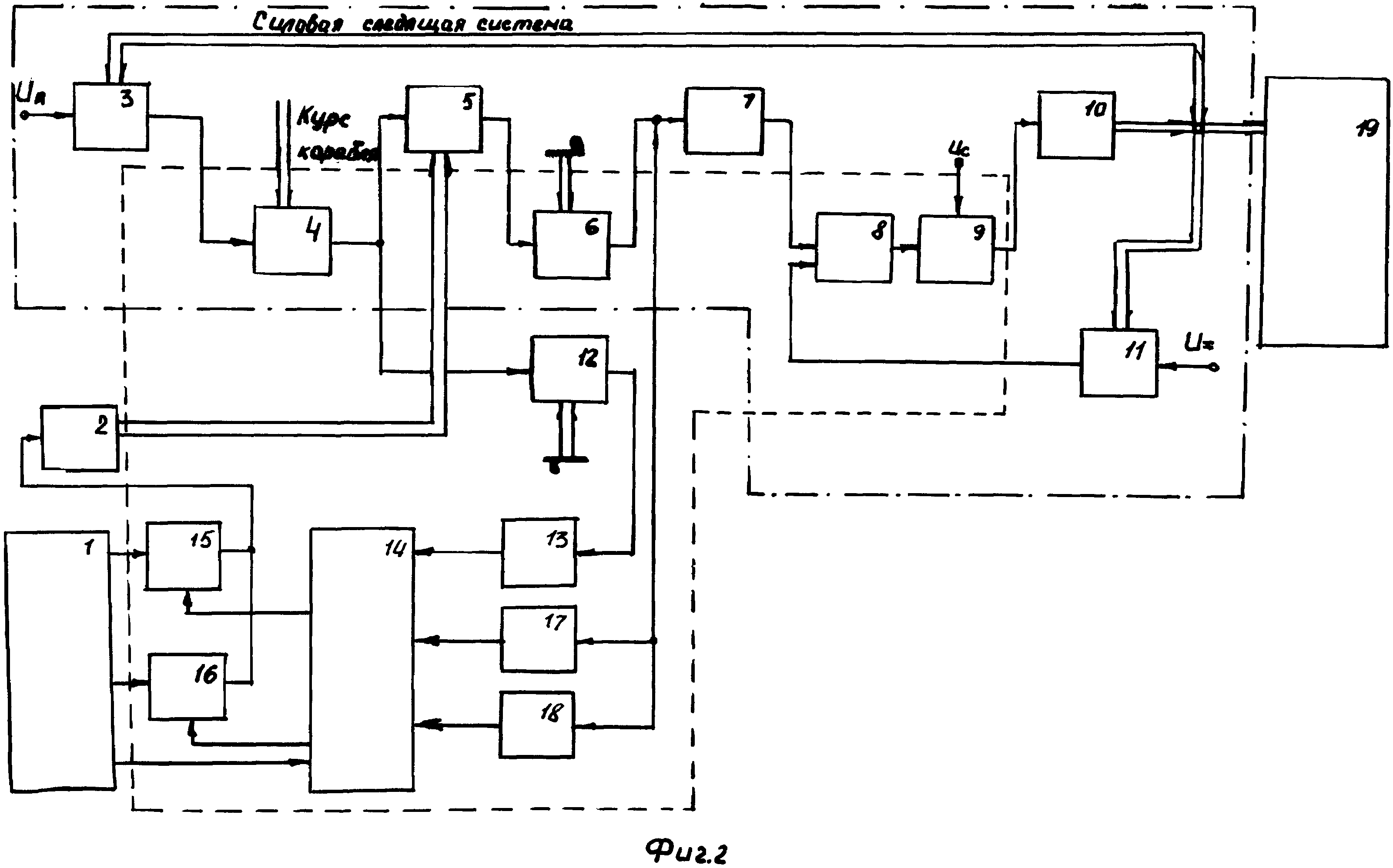
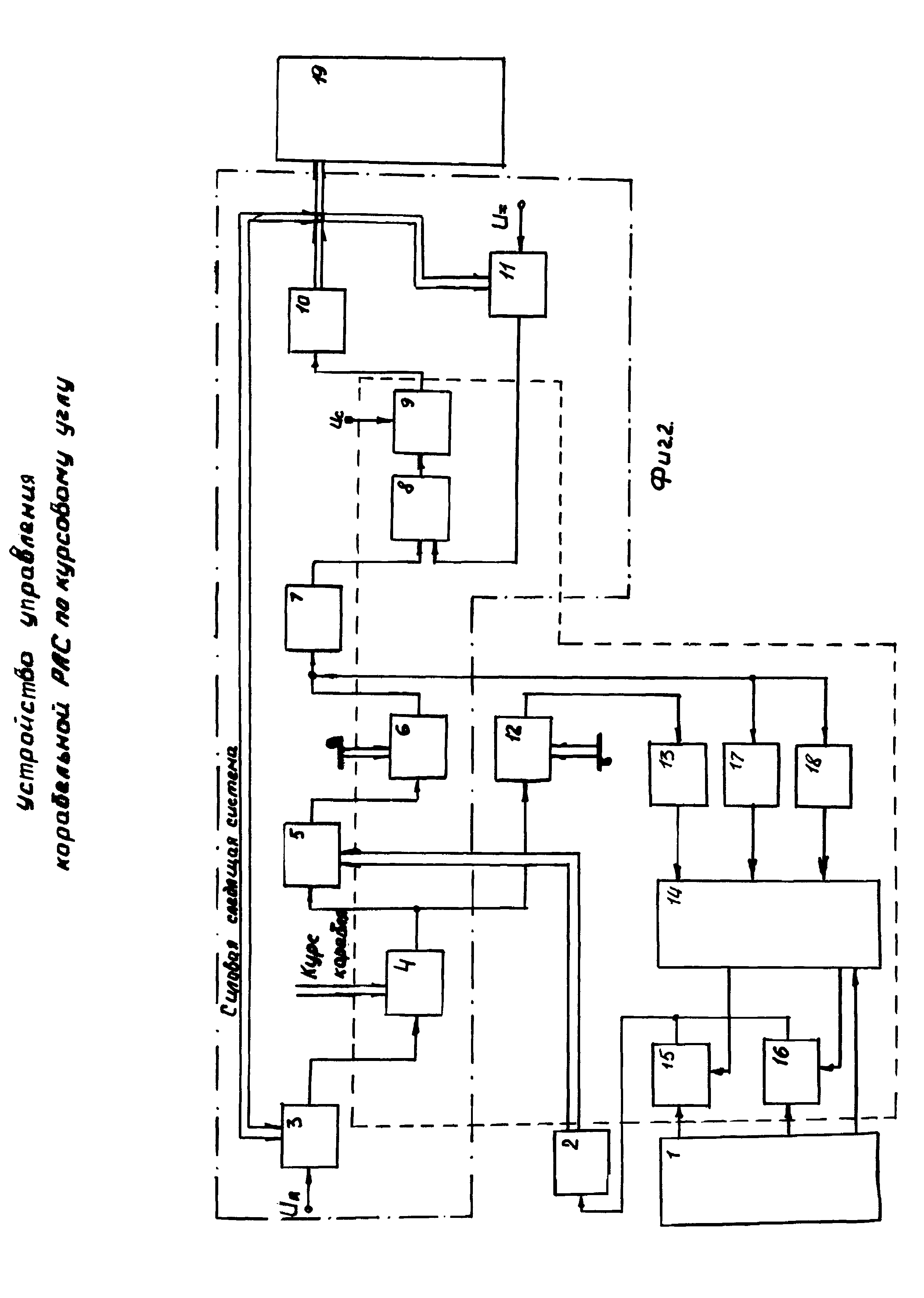
Предлагаемое устройство состоит из узла управления 1, датчика скорости 2, силовой следящей системы, включающей СКВТ-датчик КУ 3, СКВТ-датчик Кк 4, СКВТ-датчик скорости 5, СКВТ ручного управления 6, усилитель 7, блок управления с упреждающим токоограничением 8, вентильный преобразователь 9, исполнительный двигатель 10 и тахогенератор 11, и, СКВТ-датчика направления замедления 12, формирователя импульса замедления 13, логического узла 14, ключа вращения 15, ключа замедления 16, узла торможения 17, узла разгона 18 и механизма антенны 19, причем к статорной обмотке СКВТ-датчика КУ 3, подключено напряжение питания, a к роторным - статорные обмотки СКВТ-датчика Кк 4, роторные обмотки СКВТ-датчика Кк 4 соединены со статорными обмотками СКВТ-датчика скорости 5 и СКВТ-датчика направления замедления 12, роторные обмотки СКВТ-датчика скорости 5 соединены со статорными обмотками СКВТ ручного управления 6, у которого синусная обмотка ротора подключена на вход усилителя 7, а выход усилителя 7 подключен ко входу блока управления с упреждающим токоограничением 8, выход которого соединен со входом вентильного преобразователя 9, выход последнего подключен к исполнительному двигателю 10, который соединен с механизмом антенны 19, СКВТ датчиком КУ 3, тахогенератором 11, а выход последнего - со входом усилителя 7 и блока управления с упреждающим токоограничением 8, и вход усилителя 7 подключен к выходам узлов торможения 17 и разгона 18, вход формирователя импульса замедления 13 - к роторным обмоткам СКВТ-датчика направления замедления 12, а выходы формирователя импульса замедления 13, узлов торможения 17, разгона 18 и управления 1 подключены к входам логического узла 14, который управляет ключами вращения 15 и замедления 16, через которые вход датчика скорости 2 соединен с выходами узла управления 1.
Вращение антенны осуществляется силовой следящей системой следующим образом.
При несогласованных угловых положениях СКВТ-датчика КУ 3 и СКВТ 4, 5, 6, что имеет место при изменении режимов управления антенной, на входе усилителя 7 появляется напряжение рассогласования, которое усиливается им и поступает на вход блока управления 8, который формирует импульсы управления вентильным преобразователем 9. Фазовые положения импульсов определяются величиной и полярностью выходного напряжения усилителя 7. Вентильный преобразователь 9 формирует напряжение управления исполнительным двигателем 10, который вращает механизм антенны 19, ротор СКВТ-датчик КУ 3, и тахогенератор 11 до момента, когда напряжение на входе усилителя 7 станет минимальным. Механизм антенны 19 при этом поворачивается на угол, вызвавший напряжение рассогласования на входе усилителя 7 и определяемый суммарным поворотом роторов СКВТ 4, 5, 6.
При вращении какого-либо из СКВТ 4, 5, 6 с постоянной или переменной скоростью, силовая следящая система вращает антенну соответствующим образом с динамической ошибкой отработки, определяемой качеством системы.
Для уменьшения перегрузки в конструкции механизма антенны 19 и защиты исполнительного двигателя 10 от токов, превышающих допустимые, фазовые положения импульсов управления вентильным преобразователем 9 формируются в функции скорости вращения исполнительного двигателя, что обеспечивается блоком управления с упреждающим токоограничением 8, вход которого подключен к выходу тахогенератора 11.
Кроме этого выход тахогенератора 11 подключен к усилителю для повышения устойчивости силовой следящей системы.
Введение в силовую следящую систему СКВТ ручного управления 6 и СКВТ-датчика Кк позволяет разместить электромеханические устройства в удобном для эксплуатации и оптимальном для конструирования месте.
Выбор режимов работы осуществляется с помощью узла управления 1, команды которого через логический блок 14 управляют ключами вращения 15 и замедления 16.
В режиме вращения антенны с постоянной скоростью ключ вращения 15 открыт, а ключ замедления 16 закрыт и на вход датчика скорости 2 поступает напряжение, пропорциональное заданной скорости вращения. При этом датчик скорости 2 вращает ротор СКВТ-датчика скорости 5 с постоянной скоростью, которую отрабатывает силовая следящая система.
При ручном управлении ключи вращения 15 и замедления 16 закрыты и ротор СКВТ-датчика скорости 5 не вращается. Управление антенной осуществляется вручную с помощью ручки, связанной с ротором СКВТ ручного управления 6.
Режим замедления вращения антенны осуществляется следующим образом.
Формирователь импульса замедления 13 выдает импульс, середина которого определяется моментом, при котором суммарное положение роторов СКВТ-датчиков КУ 3 и Кк 4 равно положению ротора СКВТ-датчика направления замедления 12. Но так как положение последнего заданное (с помощью ручки) и остается постоянным, а сумма поворотов первых двух СКВТ равна положению антенны по пеленгу, то момент формирователя импульса замедления является неизменным относительно цели. Величина (по углу) импульса определяется требуемой шириной сектора замедления с учетом углов торможения антенны.
При наличии команды замедления, поступающей из узла управления, и импульса замедления, логический узел открывает ключ замедления 16 и закрывает ключ вращения 15. На вход датчика скорости 5 поступает напряжение, пропорциональное скорости замедленного вращения, и происходит изменение скорости вращения выходного вала датчика скорости 2 (например, с 72°/сек до 7°/сек).
Однако вследствие того, что быстродействие датчика скорости 2, представляющего собой приборную систему значительно выше быстродействия силовой следящей системы, процесс изменения скорости для последней практически является скачкообразным, что может сопровождаться большим перерегулированием и перегрузками в механизме антенны 19.
Перерегулирование и перегрузки устраняются при помощи узлов торможения 17 и разгона 18 следующим образом.
В момент замедления на входе усилителя 7 изменяется знак напряжения рассогласования и увеличивается его величина. При увеличении напряжения рассогласования до величины, при которой напряжение на исполнительном двигателе 10 достигает номинального значения, при этом знак его противоположный по сравнению с напряжением в момент вращения, узел торможения 17 выдает сигнал в логический узел, который закрывает ключ замедления 16 и открывает ключ вращения 15.
При этом скорость выходного вала датчика скорости 2 увеличивается, а напряжение рассогласования уменьшается и сигнал с выхода узла торможения 17 исчезает. Ключ вращения 15 закрывается, а ключ замедления 16 открывается.
Этот процесс повторяется до момента, при котором скорости выходных валов силовой следящей системы и датчика скорости 2 не станут равными скорости, заданной для замедления. При этом работа узла торможения прекращается, а окончательное согласование происходит в линейной зоне системы, составляющей 1-2°.
При исчезновении импульса замедления ключ вращения 15 открывается, а ключ замедления 16 закрывается, увеличиваются скорость выходного вала датчика скорости 2, напряжение рассогласования на входе усилителя 7. При достижении величины рассогласования, при которой напряжение на исполнительном двигателе 10 достигает номинальной величины, узел разгона 18 выдает сигнал, по которому логический узел 14 закрывает ключ вращения 15 и открывает ключ замедления 16. При этом уменьшаются скорость выходного вала датчика скорости 2 и напряжение рассогласования на входе усилителя 7 и сигнал с выхода узла разгона 18 исчезает. Этот процесс повторяется до момента, когда скорости вращения валов датчика скорости 2 и силовой следящей системы не станут равными скорости, заданной для вращения.
Таким образом, процесс разгона и торможения силовой следящей системы оказывается близким к оптимальному по быстродействию, так как изменение скорости датчиком скорости 2 происходит в функции изменения скорости выходного вала силовой следящей системы.
Использование силовой следящей системы в режиме ступенчатого изменения скорости ставит требование повышенного ее быстродействия.
Введение вентильного преобразователя с насыщающимися дросселями в цепи нагрузки и линейными дросселями в цепи вторичных обмоток трансформаторов, управление которым осуществляется блоком с упреждающим токоограничением 8, повышает быстродействие силовой следящей системы, ее надежность и улучшает весо-габаритные характеристики, т.к.:
- вместо тяжелых, громоздких, требующих регламентных работ ЭМУ, применены бесконтактные полупроводниковые преобразователи;
- механические перегрузки в конструкции ограничены, благодаря применению вентильного электропровода с блоком, осуществляющим режим упреждающего токоограничения, а также благодаря применению насыщающихся дросселей в цепи нагрузки и линейных дросселей в цепи вторичных обмоток трансформаторов, обеспечивающих формирование механической характеристики, близкой к экскаваторной;
- вместо четырех постоянных времени электромашинного привода (постоянная времени обмотки управления ЭМУ, постоянная времени поперечной цепи ЭМУ, постоянная времени якорной цепи исполнительного двигателя, электромеханическая постоянная времени) имеются две постоянных времени вентильного электропривода (постоянная времени якорной цепи и электромеханическая постоянная времени);
- электромеханическая постоянная времени вентильного электропривода меньше, чем с ЭМУ, т.к. вентильный электропривод имеет более жесткую механическую характеристику.
Цифровая следящая система
Перестраиваемый генератор свч
Имитатор системы сопровождения
Передающий тракт радиолокатора кругового обзора

