Результат интеллектуальной деятельности: АНАЛИЗАТОР РАДИОПОМЕХ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиотехники, в частности к устройствам анализа радиоизлучений, и может быть использовано в помехозащищенных РЛС с адаптивной перестройкой параметров зондирующих сигналов, а также в станциях пассивной разведки объектов по излучениям их бортовых РТС.
В современных РЛС одним из способов борьбы с активными помехами является перестройка частоты и параметров модуляции зондирующих сигналов таким образом, чтобы минимизировать мешающее действие помеховых сигналов. Для получения данных о распределении помех в диапазоне перестройки РЛС, их типах и интенсивности в составе таких РЛС предусматриваются специальные устройства анализа помеховой обстановки. Продолжающееся усовершенствование технических средств радиоэлектронного противодействия и методов их применения, в частности применение радиопомех с различными видами модуляции (заградительные и прицельные с амплитудной и амплитудно-частотной модуляцией, импульсные и скользящие по частоте помехи) и комбинированное применение разных типов помех обуславливают необходимость совершенствования устройств анализа помех для обеспечения распознавания и раздельного анализа параметров радиопомех в сложной обстановке с целью выбора наиболее эффективного в данных условиях маневра частотой и параметрами модуляции сигналов РЛС.
Входящие в состав РЛС анализаторы помеховой обстановки по принципу действия обычно представляют собой панорамные приемники с устройствами запоминания, анализа и сравнения сигналов, принятых в разных частотных каналах. Приемно-усилительный тракт и гетеродинное устройство такого приемника могут быть частично или полностью объединены с соответствующими устройствами приемника РЛС; в последнем случае приемное устройство РЛС работает поочередно в режиме приема отраженного сигнала и в режиме панорамного приема-анализа помеховой обстановки. При этом режим панорамного приема осуществляется обычно в течение некоторой относительно небольшой части каждого такта зондирования.
Методы и технические пути построения панорамных приемников и устройств анализа распределения интенсивности сигналов в диапазоне частот рассмотрены во многих источниках, например, в книге В.А. Мартынова и Ю.И. Селихова "Панорамные приемники и анализаторы спектра" М.: "Сов. радио", 1980 г. Известен и ряд технических решений, направленных на усовершенствование отдельных характеристик панорамных приемников применительно к различным частным задачам и условиям. Так, панорамный приемник с автоматическим подавлением широкополосных сигналов, содержащий преселектор, смеситель, гетеродин с управителем, основной УПЧ с детектором и схему анализа сигналов, для повышения помехоустойчивости снабжен двумя дополнительными УПЧ, расстроенными относительно основного в обе стороны, выходы детекторов всех УПЧ подключены к схеме "И", соединенной с управляющим входом ключа, выход основного детектора через ключ связан со схемой анализа. Такое построение позволяет исключить при панорамном обзоре прием мешающих внеполосных и широкополосных сигналов, что повышает помехоустойчивость и достоверность анализа, но одновременно значительно сужает область возможного применения такого приемника, делая его пригодным для анализа только узкополосных сигналов.
В анализаторе помех используются гетеродинное устройство РЛС и ее приемно-усилительный тракт, на выходе которого в режиме анализа помех включаются устройства запоминания и анализа сигналов, осуществляющие интегрирование сигнала помехи, сравнение его уровня с уровнями сигналов помех в других частотных каналах и выдачу кода канала, в котором шум наименьший. Прием и анализ помех производится в каждом такте зондирования в течение временного интервала между временем, соответствующим максимальной дальности действия РЛС, и началом следующего такта. За это время производится ступенчатая перестройка гетеродинного устройства во всем рабочем диапазоне, в результате чего приемник работает поочередно на каждом из своих частотных каналов приема (по несколько МКС на каждом). На устройство запоминания и анализа в это время поступают сигналы помех, соответствующие разным частотным каналам. Это устройство обладает высоким быстродействием, позволяя производить анализ в каждом такте зондирования, и не требует применения специальных гетеродинных и приемных устройств, дополнительных к уже имеющимся в РЛС. Однако в этом анализаторе не предусмотрены средства для определения типа помехи (шумовая AM, скользящая ЧМ, импульсная), а определение уровней помех в частотных каналах с помощью интегратора, подключаемого к выходу приемника, дает лишь некоторый усредненный за время наблюдения уровень помехи в данном канале, минимум которой не всегда соответствует наименьшему мешающему эффекту помехи.
Отсутствие возможности различения типа помех и раздельной оценки их энергетических и спектральных характеристик является недостатком этого анализатора.
Тот же недостаток присущ устройству выделения сигналов помех, входящему в состав прибора для подавления помех по пат. США №3916406 от 28.10.1975 г. (G01S 7/36, Н04в 15/00; НК 343-7А). В этом устройстве также используется накопитель (интегратор) с большой постоянной времени, включенный на выход приемника РЛС с перестройкой частоты. С выходом устройства выделения сигналов помех связано устройство перестройки частоты передатчика и приемника РЛС; включение перестройки производится при определенном уровне выходного сигнала устройства выделения помехи. Перестройка продолжается до попадания на частоту, где интегральный уровень помехи меньше заданного порога; тип помехи при этом не определяется.
Подобным образом построен и радиолокатор с перестройкой частоты по пат. США №4135189 от 16.01.1979 г. (G01S 7/36, НК 343-18К), содержащий передатчик, приемник, устройство разведки и селекции мешающих сигналов и устройство, осуществляющее настройку передатчика и приемника. В процессе работы радиолокатора на некоторой определенной несущей частоте в течение одного из циклов "передача-прием" устройство разведки осуществляет прием сигналов на различных частотах, после чего производится селекция (выбор) одной из частот и настройка передатчика и приемника РЛС в следующем цикле на выбранную частоту. В отличие от предыдущего, в этом устройстве возможен выбор частотного канала с наименьшим уровнем помехи, однако и здесь для сравнения используются результаты усреднения принятых мешающих сигналов независимо от их типа.
Некоторые меры для распознавания типа активных шумовых помех приняты в устройстве для управления перестройкой несущей частоты РЛС. Это устройство содержит узел управления перестройкой, пульт оператора и анализатор помехи; для выбора частоты в каждом такте зондирования устройство осуществляет быструю дискретную перестройку приемника РЛС в рабочем диапазоне частот, измерение среднего значения сигнала помехи в каждом из частотных каналов и сравнение их с постоянным пороговым уровнем. Для распознавания типа помехи (заградительная, прицельная, скользящая) в устройство введены дополнительные узлы и блоки, осуществляющие запоминание получаемых в каждом такте данных измерения средних уровней сигналов помех во всех каналах на несколько последующих тактов и последующее определение числа и взаимного расположения пораженных помехой частотных каналов РЛС, а также динамики их изменения во времени. Применение этих дополнительных операций обработки сигналов помех, реализуемых введенными в устройство блоками (блоки формирования частотно-временных признаков и распознавания вида помехи) позволяет осуществить различение некоторых типов помех. Так, признаком воздействия широкополосной шумовой помехи может являться наличие сигналов помех в одних и тех же нескольких смежных частотных каналах в течение ряда последовательных тактов зондирования; различение прицельной (относительно узкополосной) и заградительной помех производится по ширине спектра, т.е. по числу частотных каналов, пораженных помехой. В описании рассматриваемого устройства указывается также на возможность распознавания скользящей по частоте помехи, признаком чего должно являться перемещение сигнала помехи из одного частотного канала в другой в последовательных тактах зондирования. Однако закономерное перемещение наблюдаемого в последовательных циклах частотного поиска значения частоты помехи, позволяющее определить закон частотной модуляции помехи и установить факт ее принадлежности к разновидности скользящих помех, будет иметь место лишь в случае, когда период перестройки по частоте скользящей помехи значительно больше, чем период перестройки по частоте панорамного приемника т.е. интервал времени между последовательными моментами настройки панорамного приемника на одну частоту, обычно равный такту зондирования. В противном случае наблюдаемое в последовательных циклах перестройки панорамного приемника положение скользящей по частоте помехи будет случайным образом изменяться, что не позволяет достоверно идентифицировать эту помеху как скользящую. Если же период перестройки скользящей помехи меньше периода поиска панорамного приемника, то за один цикл помеха будет иметь место прием помехи в нескольких частотных каналах, т.е. ситуация, характерная для случая воздействия широкополосной шумовой помехи. Именно такая ситуация будет наблюдаться в большинстве случаев типичных сочетаний характеристик скользящих помех и технических данных РЛС (скорость перестройки скользящей помехи до  при полосе качания порядка нескольких сотен МГц, число частотных каналов РЛС 8÷12 при времени анализа помехи в одном канале до 3÷5 мкс).
при полосе качания порядка нескольких сотен МГц, число частотных каналов РЛС 8÷12 при времени анализа помехи в одном канале до 3÷5 мкс).
Таким образом, устройство позволяет решить задачу распознавания скользящей помехи только в том частном случае, когда длительность цикла перестройки помехи значительно (не менее чем в несколько раз) больше цикла поиска по частоте, т.е. периода повторения РЛС, что не является типичным для помеховой обстановки в диапазоне работы РЛС; в обычных ситуациях это устройство не позволяет различить скользящую и широкополосную шумовую помехи. Кроме того, распознавание вида помехи в данном устройстве производится в результате обработки совокупности усредненных уровней помех в различных частотных каналах, получаемых в ряде последовательных тактов зондирования, что обуславливает относительно невысокое быстродействие этого устройства при анализе типа помехи.
Более высокое быстродействие по распознаванию скользящей помехи достигается в радиоприемной системе для подавления помеховых сигналов от частотно-модулированных передатчиков помех (международная заявка №81/02470 от 3.09.1981 г.; G01S 7/36, Н04в 1/10). В этой системе для обнаружения и определения параметров сигналов ЧМ помех, в частности, скорости качания частоты, применен широкополосный приемный тракт с ограничителем, после которого параллельно включены два настроенных на разные частоты узкополосных УПЧ с детекторами на выходах. Многоканальное построение приемного тракта, подобное примененному в одном из вышеописанных аналогов, принципиально позволяет произвести определение параметров скользящей помехи по одному акту приема (по факту разновременности появления сигнала помехи в двух узкополосных УПЧ и величине запаздывания), что обеспечивает высокое быстродействие. Однако устройство по заявке №81/02470 предназначено для работы в условиях воздействия только ЧМ помех и не обеспечивает уверенного различения скользящей ЧМ помехи от других видов помех, при которых возможно проявление эффекта разновременного приема сигналов в разнесенных по частоте каналах, в частности, от широкополосной шумовой AM помехи, когда воздействие на двухканальный анализатор некоррелированных по частоте шумовых выбросов в ряде случаев будет неотличимо от скользящей помехи (при использовании только критерия разновременности приема). Таким образом, данное устройство также не обеспечивает распознавания помех различных типов.
В качестве прототипа предлагаемого технического решения принято устройство содержит многоканальный приемный тракт с тремя УПЧ - основным и двумя боковыми, расстроенными относительно основного в обе стороны; к выходу детектора основного УПЧ через управляемый коммутатор (ключ) подсоединена схема анализа. Управление коммутатором производится логической схемой (схемой "И"), подключенной к выходам детекторов всех каналов (УПЧ) и вырабатывающей сигнал управления коммутатором в соответствии с установленным критерием (при совпадении сигналов на выходах всех каналов). Устройство содержит также входные узлы панорамного приемника - преселектор, гетеродин с управителем и смеситель, к выходу которого подключены вышеупомянутые УПЧ.
Боковые УПЧ, коммутатор и логическая схема формирования управляющего сигнала введены в устройство для повышения его помехоустойчивости при панорамном обзоре и обеспечивают решение этой задачи путем распознавания широкополосных мешающих сигналов и коммутации (отключения) входа схемы анализа на время воздействия этих сигналов. Различение типа сигнала в процессе приема (а не в результате последующего анализа запомненных данных), а также наличие средств управления процессом анализа путем выделения сигналов определенного вида являются достоинствами прототипа.
Однако устройство-прототип, также как ряд из рассмотренных выше аналогов, позволяет осуществить распознавание только некоторых отдельно взятых видов мешающих сигналов и не дает возможности различения и разделения других типов активных помех, в частности, скользящих (ЧМ) и широкополосных шумовых АМ помех.
Целью предложения является повышение вероятности распознавания типа и точности определения параметров радиопомех различных типов, в частности, шумовых, импульсных и скользящих по частоте. Указанная цель достигается тем, что в состав устройства, построенного известным образом и содержащего несколько настроенных на разные частоты приемных каналов (ПК), один из которых является основным, а остальные - боковыми, включенные на выходах этих ПК детекторы с амплитудными порогами (АП), коммутатор с подключенным к его управляющему входу логическим формирователем управляющих сигналов (ЛФУС), вход которого соединен с выходом АП, стоящего на выходе детектора основного ПК, и подключенный к выходу коммутатора блок анализа, содержащий устройства накопления и усреднения, введены дополнительный амплитудный порог (ДАП), подключенный к выходу детектора основного ПК и имеющий более высокий, чем у основного АП, уровень срабатывания, измеритель длительностей фронтов сигнала (ИДФС), измеритель частотно-временных сдвигов фронтов (ИЧВСФ) и измеритель длительности сигнала (ИДС) с подключенными к выходам этих измерителей цифровыми порогами (ЦП), выходы которых подключены к другим входам ЛФУС, и устройство кратковременной памяти (например, линия задержки), включенное между выходом детектора основного ПК и входом коммутатора, выполненного в виде переключателя на "n" выходов, где "n" - число различаемых типов радиопомех, при этом блок анализа выполнен в виде "n" параллельных устройств накопления и усреднения, входами подключенных к соответствующим выходам коммутатора, выход ДАП соединен с ИДФС, второй вход которого подключен к выходу АП основного ПК, соединенному также с входом ИДС и с первым входом ИЧВСФ, другие входы которого подключены к выходам АП боковых ПК, а ЛФУС выполнен в виде совокупности логических элементов ("И", "ИЛИ", схемы запрета, логические пороги), осуществляющих различение "n" вариантов сочетаний выходных сигналов ЦП, соответствующих "n" разным типам радиопомех.
При этом ИДФС выполнен в виде двух измерителей временных интервалов (ИВИ), например, управляемых дискретных накопителей (счетчиков), останавливающий и запускающий входы первого из которых через инверторы соединены, соответственно, с запускающим и останавливающим входами второго и являются первым и вторым входами всего ИДФС, а его выходами являются выходы ИВИ.
Если анализатор подобно прототипу содержит три ПК - основной и два боковых (верхний и нижний), расстроенных по частоте относительно основного в разные стороны, то ИЧВСФ может быть выполнен в виде двух трехвходовых формирователей сигналов сдвига (ФСС), отдельных для обработки сигналов скользящих помех с прямым и обратным направлением частотной перестройки, а каждый ФСС состоит из четырех ИВИ и трех компараторов, например, схем вычитания, причем первый из этих компараторов подключен к выходам первого и второго ИВИ, второй - к выходам второго и четвертого, а третий - к выходам третьего и четвертого ИВИ, запускающий вход первого ИВИ соединен с останавливающим входом второго и, через инвертор - с запускающим входом третьего и останавливающим входом четвертого ИВИ и является первым входом ФСС, связанным с первым входом второго ФСС и является первым входом всего ИЧВСФ, останавливающий вход первого и запускающий вход второго ИВИ через инверторы соединены, соответственно, с останавливающим входом третьего и запускающим входом четвертого ИВИ и являются вторым и третьим входами ФСС, второй и третьи входы одного ФСС соединены, соответственно, с третьим и вторым входами другого ФСС и образуют второй и третий входы всего ИЧВФС, выходами которого являются выходы всех ИВИ и компараторов, входящих в оба ФСС.
При этом для распознавания и раздельного анализа радиопомех четырех типов - шумовой, импульсной, скользящей прямой и скользящей обратной ("n"=4), коммутатор выполнен в виде переключателя на четыре положения, блок анализа содержит четыре устройства накопления и усреднения, а ЛФУС содержит четыре логических порога (ЛП), пять элементов "ИЛИ", четыре элемента "И" и два элемента "НЕ-И" ("Запрет"), например, в виде элемента "И" с одним инверсным входом, входы первого и третьего ЛП подключены к выходам цифровых порогов (ЦП), связанных с ИВИ соответственно первого и второго ФСС, входящих в ИЧВСФ, выходы этих ЛП через первый элемент "ИЛИ" подключены к первому входу первого элемента "И", на второй вход которого поданы объединенные вторым элементом "ИЛИ" выходы второго и четвертого ЛП, входы которых подключены к ЦП, связанным с выходами компараторов соответственно первого и второго ФСС, выход первого элемента "И" соединен с первыми входами второго и третьего элементов "И", вторые входы которых подключены, соответственно, к выходам третьего и четвертого элементов "ИЛИ", объединяющих, соответственно, выходы первого и второго и выходы третьего и четвертого ЛП, входы четвертого элемента "И" подключены к ЦП, включенным на выходах ИДС и ИДФС, а выход четвертого элемента "И" подан на прямой вход первого элемента "НЕ-И", выход которого через пятый элемент "ИЛИ" подключен к инверсному входу второго элемента "НЕ-И", прямым входом соединенного с выходом АП, стоящего на выходе детектора основного ПК, а инверсный вход первого элемента "НЕ-И" соединен с вторым входом пятого элемента "ИЛИ" и подключен к выходу первого элемента "И", при этом выходы второго и третьего элементов "И" и обоих элементов "НЕ-И" являются выходами четырех видов команд, вырабатываемых ЛФУС, а устройство кратковременной памяти выполнено в виде линии задержки на время, соответствующее времени выработки управляющих команд и переключения коммутатора.
Сущность предложения заключается во введении дополнительных устройств для измерения и порогового сравнения совокупности временных сдвигов обоих (переднего и заднего) фронтов каждого единичного сигнала (импульса или шумового выброса) при измерении на разных уровнях и в разнесенных частотных каналах, что, при соответствующем выполнении логического формирователя управляющих команд, коммутатора и блока анализа, позволяет осуществить различение и раздельный анализ параметров помеховых сигналов разных типов практически в реальном масштабе времени. Это дает возможность повысить эффективность функционирования активных и пассивных РЛС, в которых используется предлагаемый анализатор, при работе в сложной помеховой обстановке. В активных РЛС это достигается путем оптимизации маневра частотой и параметрами модуляции зондирующего сигнала с учетом распределения помех различных типов в диапазоне, а в пассивных РЛС - за счет исключения помеховой составляющей из потока принимаемых и обрабатываемых сигналов.
Построение и порядок работы предлагаемого анализатора поясняются последующим подробным описанием и прилагаемыми чертежами; в качестве примера рассматривается трехканальный вариант построения.
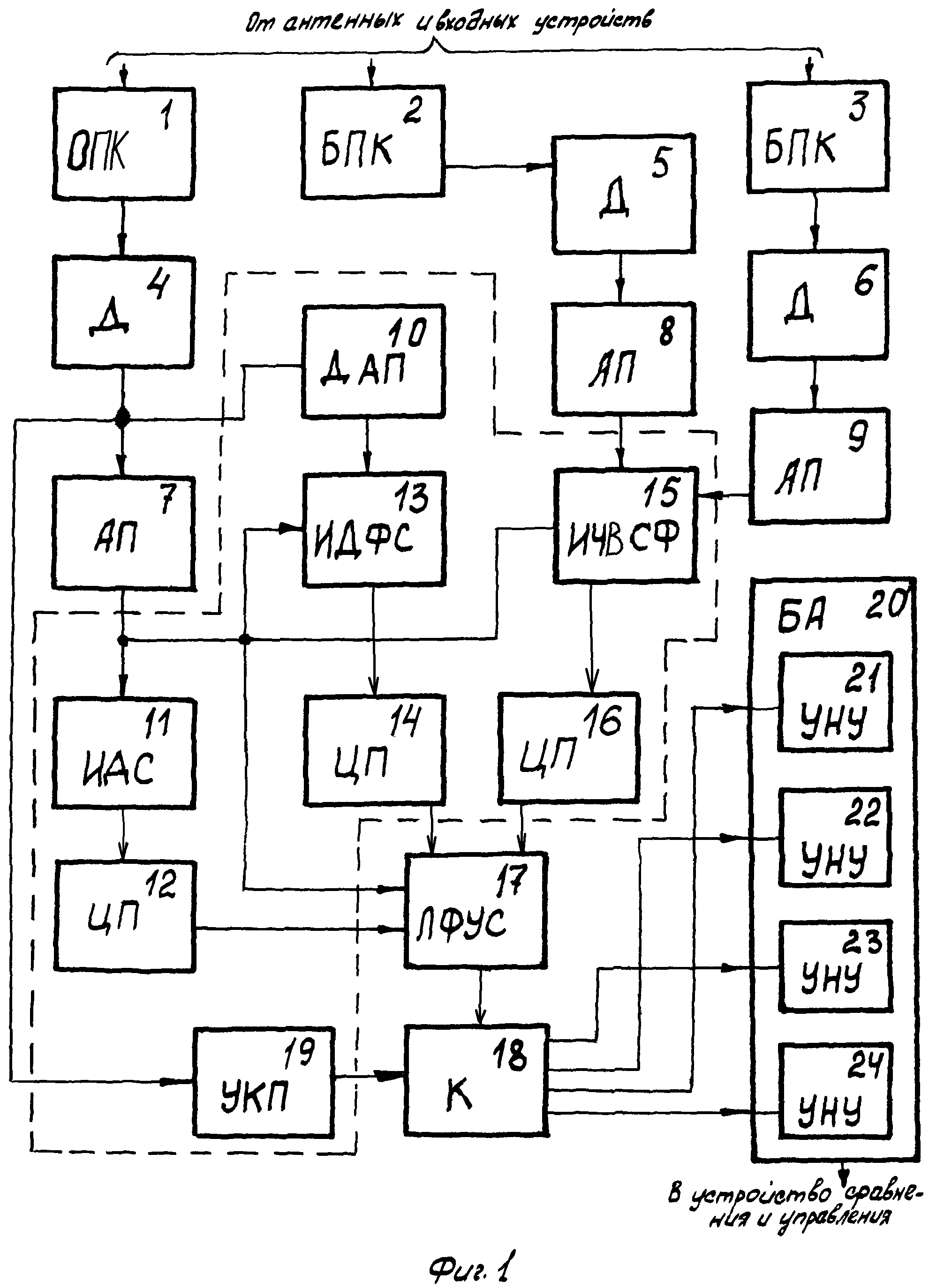
На фиг.1 приведена укрупненная схема анализатора, на фиг.2 и 3 даны подробные функциональные схемы описываемых в тексте вариантов построения измерителей длительностей фронтов сигнала и частотно-временных сдвигов фронтов, на фиг.4 приведена схема логического формирователя управляющих сигналов, на фиг.5 показана последовательность приема сигнала скользящей помехи в трех каналах приемника и эпюры напряжений в отдельных точках схемы.
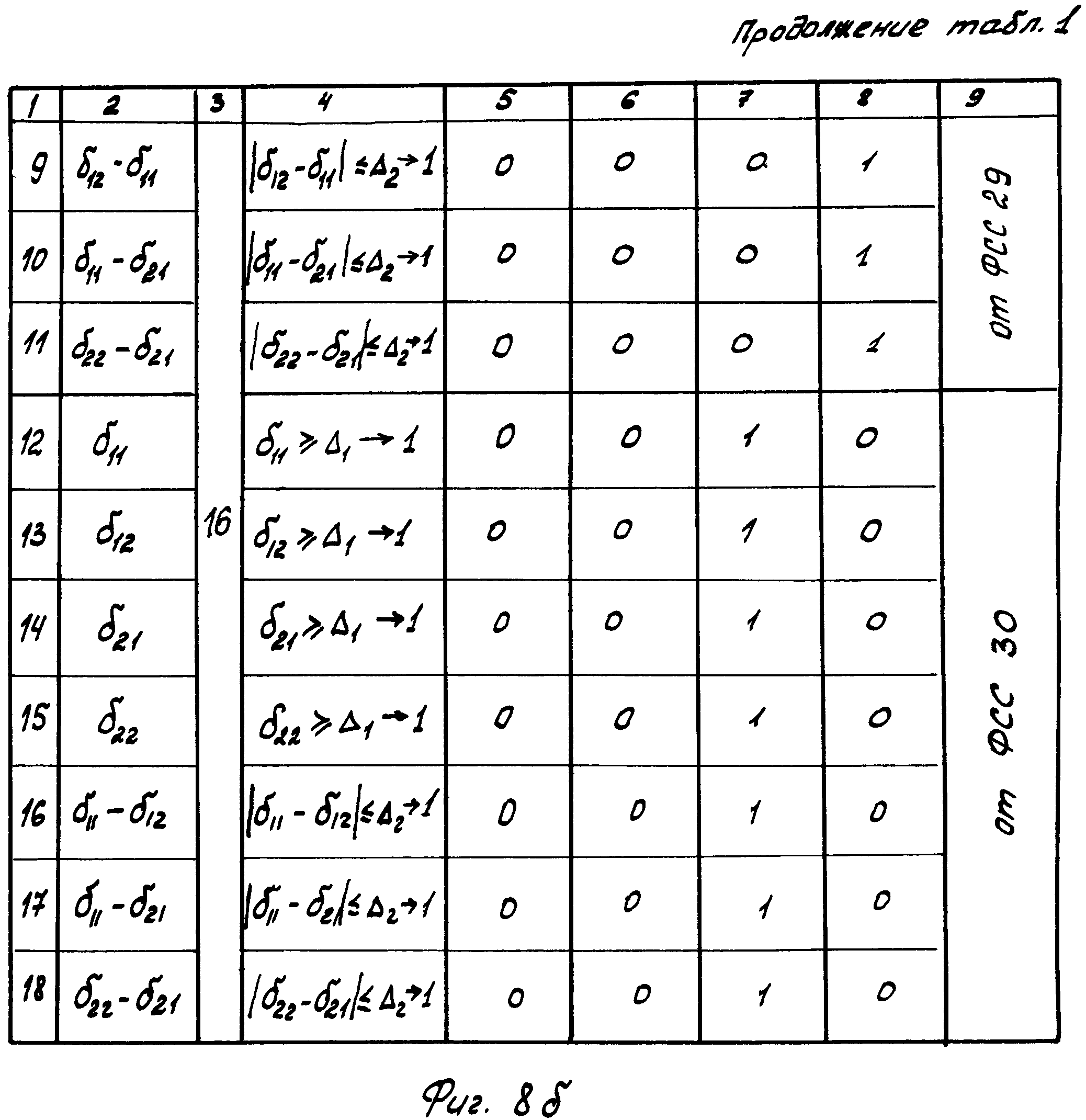
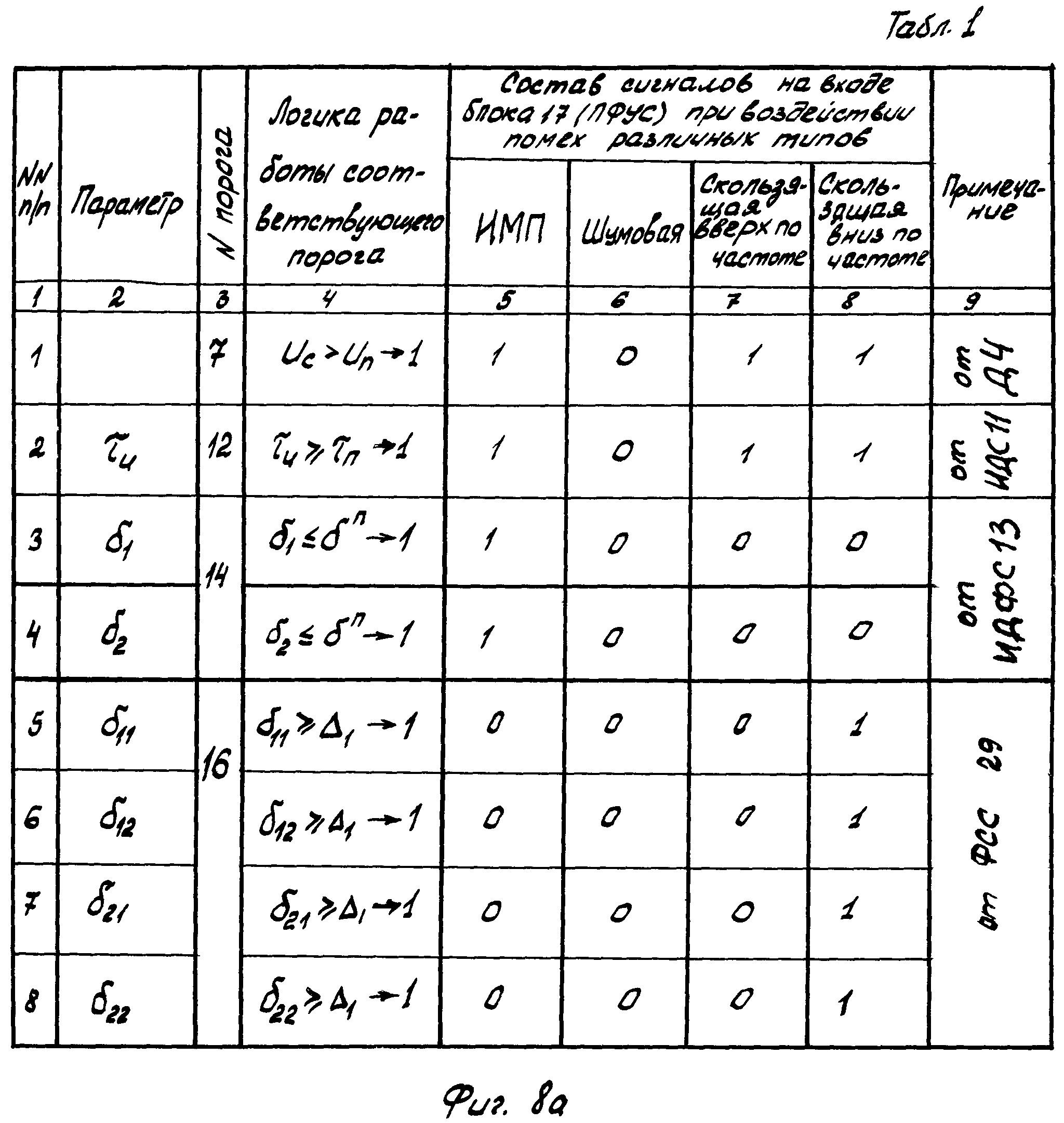
На фиг.6 и 7 приведены эпюры напряжений в характерных точках схем измерителя длительности фронтов сигналов и измерителя частотно-временных сдвигов фронтов, соответственно, поясняющие процессы измерения этих параметров. На фиг.8а, б в табл.1 приведена логика работы цифровых порогов по каждому измеряемому параметру и сочетания логических сигналов ("0" и "1") на их выходах (входах логического формирователя управляющих сигналов) для каждого из четырех видов помех, распознаваемых заявляемым анализатором.
На чертежах (фиг.1 - Фиг.2) и в тексте описания приняты следующие сокращения:
ПЕРЕЧЕНЬ ОБОЗНАЧЕНИЙ
АП - амплитудный порог;
БА - блок анализа;
БПК - боковой приемный канал;
ДАП - дополнительный амплитудный порог;
ИВИ - измеритель временных интервалов;
ИДС - измеритель длительности сигнала;
ИДФС - измеритель длительности фронтов сигнала;
ИНВ - инвертор;
ЛП - логический порог;
ЛФУС - логический формирователь управляющих сигналов;
ПК - приемный канал;
ОПК - основной приемный канал;
УКП - устройство кратковременной памяти;
УНУ - устройство накопления и усреднения;
ФСС - формирователь сигналов сдвига;
ЦП - цифровой порог.
Анализатор (фиг.1) содержит основной приемный канал (ОПК) 1 и боковые приемные каналы (БПК) 2 и 3, расстроенные по частоте относительно основного в разные стороны. На выходах каналов включены детекторы (Д) 4, 5, 6, с подключенными к ним амплитудными порогами (АП) 7, 8, 9. К выходу детектора основного канала 4 подключен также дополнительный амплитудный порог (ДАП) 10 с более высоким, чем у основного порога 7 уровнем срабатывания. К выходу амплитудного порога основного канала 7 подключены измеритель длительности сигнала (ИДС) 11 с включенным на его выходе цифровым порогом (ЦП) 12, измеритель длительностей фронтов сигнала (ИДФС) 13 с включенным на его выходе ЦП 14, измеритель частотно-временных сдвигов фронтов (ИЧВСФ) 15 с включенным на его выходе ЦП 16 и логический формирователь управляющих сигналов (ЛФУС) 17, другие входы которого подключены к выходам всех вышеупомянутых ЦП 12, 14, 16. Выход ДАП 10 подключен к второму входу ИДФС 13, а выходы АП боковых каналов 8 и 9 подключены к другим входам ИЧВСФ 15. Выход ЛФУС 17 подан на управляющий вход коммутатора (К) 18, сигнальный вход которого через устройство кратковременной памяти (УКП) 19 (например, линию задержки) соединен с выходом детектора основного канала 7. Выходы коммутатора 18 поданы на входящие в блок анализа (БА) 20 устройства накопления и усреднения (УНУ) 21, 22, 23, 24. ИДФС 13, схема которого представлена на фиг.2 содержит два измерителя временных интервалов (ИВИ) 25 и 26; запускающий и останавливающий входы одного из которых (ИВИ25) через инверторы (ИНВ) 27 и 28 соединены, соответственно, с останавливающим и запускающим входами другого. Вводами ИДФС 13 являются входы ИВИ 25 (или, что то же самое, входы ИНВ 27 и ИНВ 28), а выходами ИДФС являются выходы ИВИ 25 и ИВИ 26; стоящий на выходе ИДФС 13 ЦИ 14 при этом состоит из двух пороговых устройств (для раздельного сравнения с порогом длительностей переднего и заднего фронтов сигнала).
ИВИ представляют собой управляемые дискретные накопители (счетчики), запуск и останов которых производятся по раздельным входам положительными (передними) фронтами сигналов на выходах соответствующих АП.
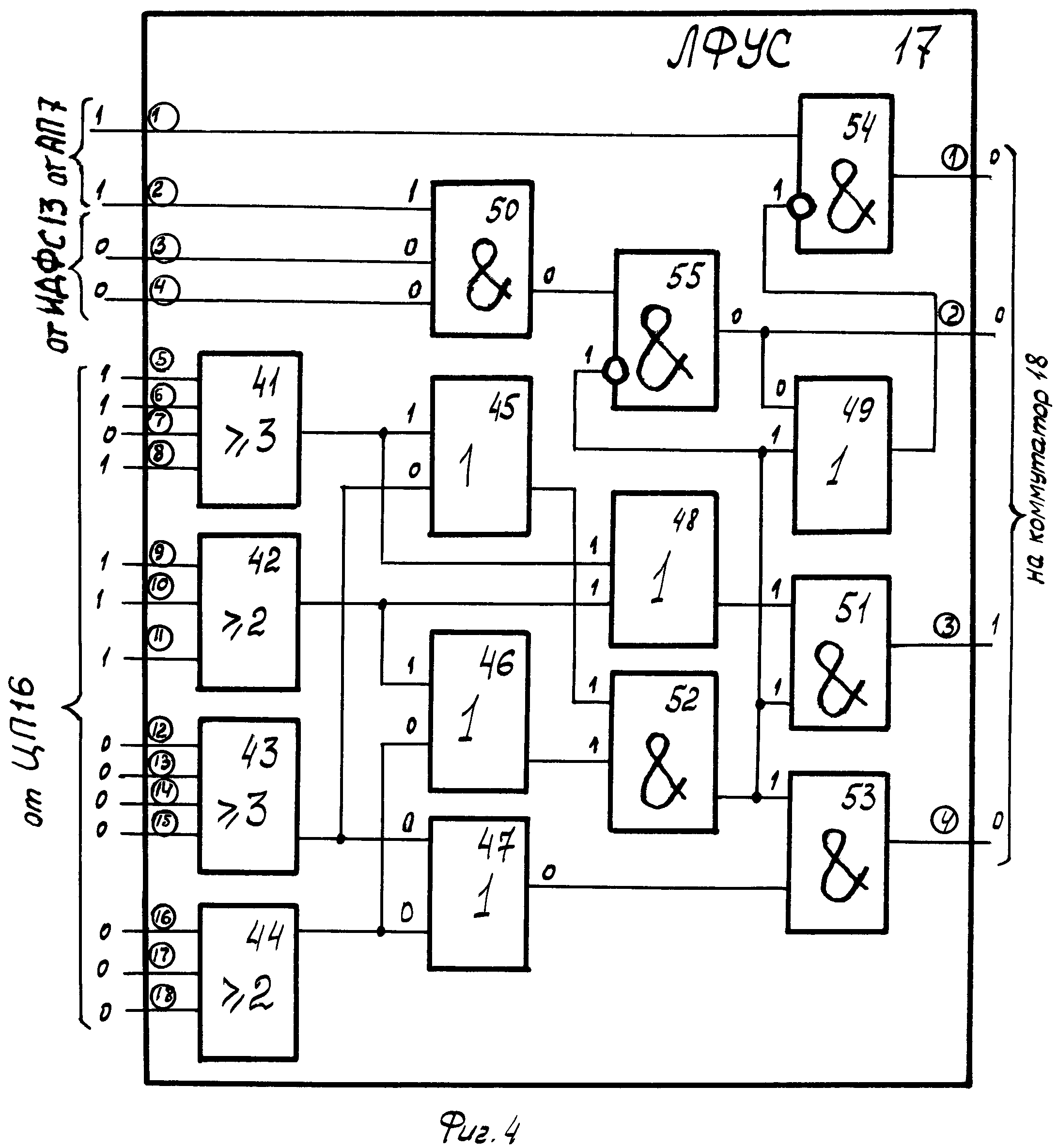
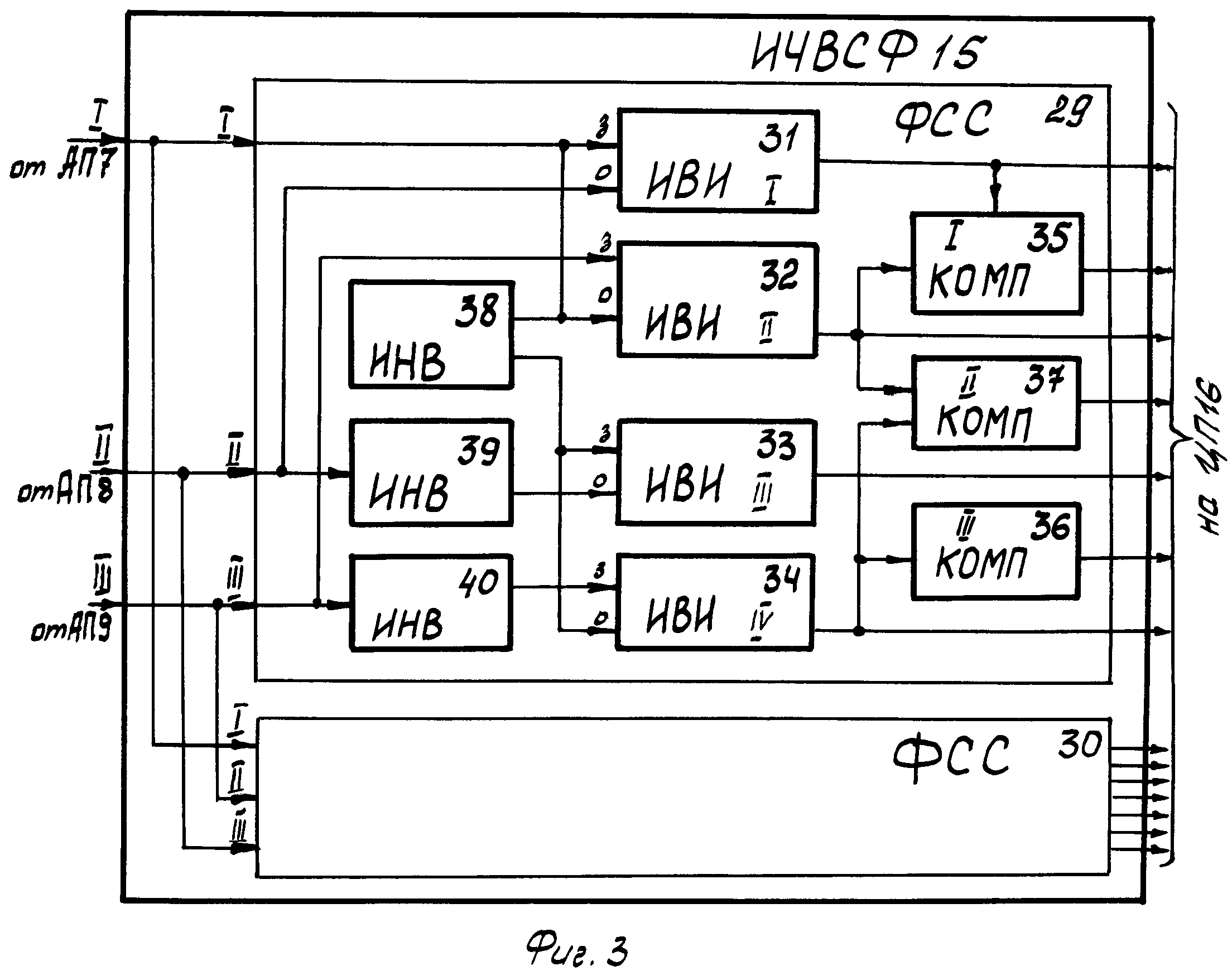
Схема ИЧВСФ 15 представлена на фиг.3. ИЧВСФ состоит из двух идентичных формирователей сигналов сдвига (ФСС) 29 и 30, каждый из которых включает в себя четыре ИВИ (31, 32, 33, 34) и три компаратора (КОМП) 35, 36, 37, представляющие собой схемы вычитания и подключенные к выходам разных пар ИВИ. Запускающий вход ИВИ 31 соединен с останавливающим входом ИВИ 32 и, через инвертор 38 - с запускающим входом ИВИ 33 и останавливающим входом ИВИ 34 и образует первый вход ФСС (29 и 30); первые входы обоих ФСС соединены и образуют первый вход всего ИЧВСФ 15. Останавливающий вход ИВИ 31, связанный через инвертор 39 с останавливающим входом ИВИ 33, является вторым, входом ФСС, а запускающий вход ИВИ 32, связанный через инвертор 40 с запускающим входом ИВИ 34, является третьим входом ФСС. Второй и третий входы ФСС 29 соединены, соответственно, с третьим и вторым входами ФСС 30 и являются вторым и третьим входами всего ИЧВСФ 15, выходами которого являются выходы всех ИВИ и компараторов, входящих в оба ФСС. При этом стоящий на выходе ИЧВСФ 15 ЦП 16 состоит из ряда пороговых устройств (по числу всех ИВИ и компараторов), каждое из которых подключено к выходу одного из ИВИ или компараторов. Схема ЛФУС 17 представлена на фиг.4. ЛФУС 17 представляет собой дешифратор, осуществляющий различение четырех групп сочетаний сигналов, поступающих на его входы от ЦП 12, 14, 16 и АП7 при воздействии на анализатор разных видов помех (шумовых, импульсных и скользящих по частоте с "прямым" и "обратным" направлением частотной перестройки). В состав ЛФУС входят четыре логических порога (ЛП) 41, 42, 43, 44, пять логических элементов "ИЛИ" 45, 46, 47, 48, 49, четыре логических элемента "И" 50, 51, 52, 53 и два логических элемента "запрет" (54 и 55), представляющие собой элементы "И" с одним инверсным входом и обозначаемые в настоящем описании как элементы "НЕ-И".
Прямой вход элемента "НЕ-И" 54 является входом ЛФУС, подключенным к выходу АП основного канала 7, входы элемента "И" 50 являются входами ЛФУС, подключенными к выходам ЦП 12 и 14, стоящих на выходах ИДС 11 и ИДФС 13, а совокупность входов логических порогов (ЛП) 41, 42, 43, 44 образует вход ЛФУС, связанный с ЦП 16, стоящим на выходе ИЧВСФ 15. При этом входы ЛП 41 и 43 соединены с теми, входящими в состав ЦП 16, пороговыми устройствами, которые связаны с выходами измерителей временных интервалов (ИВИ), входящих в ФСС 29 и 30 (входы ЛП 41 соответствуют ИВИ, входящим в ФСС 29, а входы ЛП 43 - ИВИ, входящим в ФСС 30), а входы ЛП 42 и 44 соединены с пороговыми устройствами, связанными с выходами компараторов, входящих, соответственно, в состав ФСС 29 и ФСС 30. Выходы ЛП 41 и 43 через элемент "ИЛИ 45 подключены к первому входу элемента "И" 52, на второй вход которого поданы объединенные элементом "ИЛИ" 46 выходы ЛП 42 и 44. Выход элемента "И" 52 соединен с первыми входами элементов "И" 51 и 53, вторые входы которых подключены, соответственно, к выходам элементов "ИЛИ" 48 и 47, объединяющих, соответственно, выходы ЛП 41 и 42 и ЛП 43 и 44, Выход элемента "И" 50 подан на прямой вход элемента "НЕ-И" 55, выход которого через элемент "ИЛИ" 49 подключен к инверсному (запрещающему) входу элемента "НЕ-И" 54, а инверсный вход элемента "НЕ-И" 55 соединен с вторым входом элемента "ИЛИ" 49 и подключен к выходу элемента "И" 52. Выход ЛФУС образуется совокупностью выходов элементов "И" 51 и 53 и обоих элементов "НЕ-И" (54 и 55), соответствующих четырем видам сигнала управления, выдаваемого на коммутатор (18) для установки его в одно из четырех положений (в соответствии с видом анализируемого сигнала).
Функционирует предлагаемое устройство следующим образом. Принятые антенной и входными устройствами сигналы одновременно поступают на ОПК 1, БПК 2 и БПК 3, где усиливаются до уровня, необходимого для нормального функционирования последующих устройств. Будем считать, что частота настройки БПК 2 ниже, настройки ОПК 1, а частота БПК 3 выше. Усиленные приемными каналами (ПК) сигналы детектируются детекторами Д4, Д5 и Д6 и поступают на амплитудные пороговые устройства АП4, АП8 и АП9 соответственно. С выхода Д4 видеосигнал, кроме того, поступает на ДАП 10 и, через УКП 19, на вход коммутатора 18. Время памяти УКП 19 не менее времени формирования сигнала, управляющего коммутатором 18.
В зависимости от вида сигнала управления, выработанного ЛФУС 17 по сигналам ДП 12, 14, 16, коммутатор 18 выдает принятые ОПК 1 импульсы на соответствующие входы блока анализа 20, где производится измерение их параметров, накопление и усреднение результатов измерения УНУ 21-24, каждое из которых рассчитано на анализ сигналов соответствующего типа.
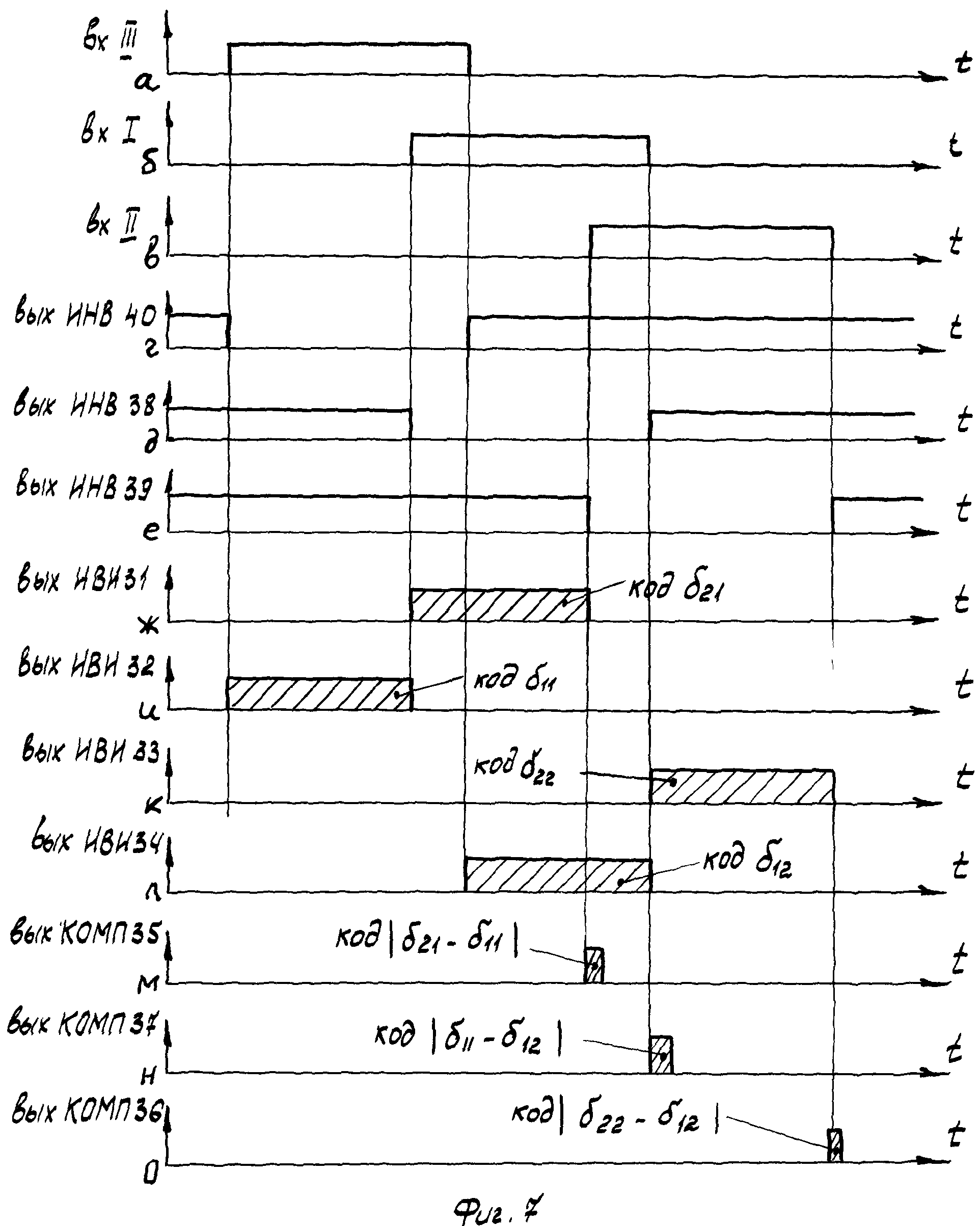
Более подробно работу предлагаемого устройства рассмотрим на примере анализа шумовой помехи, скользящей сверху вниз по частоте. В данном случае сигнал помехи с полосой Δfп последовательно принимается ВПК 3, ОПК 1 и БПК 2 (фиг.5а). Вид и взаимное положение сигналов на выходах детекторов приемных каналов Д4-Д6 показаны на фиг.5б-г, где также показаны соответствующие пороговые напряжения, установленные в амплитудных порогах АП6-АП8 и ДАП 10 (фиг.1). По сигналам детекторов Д4-Д6 амплитудные пороги АП6-АП8 и ДАП 10 (фиг.1) формируют прямоугольные импульсы стандартной амплитуды, длительность которых соответствует времени превышения принятым сигналом помехи соответствующего порогового напряжения (фиг.5д-и). Сформированные АП7-АП9 сигналы поступают на ИЧВСФ 15, кроме того, сигнал с АП7 поступает на ИДС 11 и ИДФС 13, на который поступает сигнал с ДАП 10 (фиг.1). Сигнал от АП 7 поступает на запускающий вход ИВИ 25 и ИНВ 27, сигнал от ДАП 10 - на останавливающий вход ИВИ 25 и ИНВ 28 фиг.2. Процесс измерения длительностей фронтов δ1 и δ2 поясняется временной диаграммой фиг.6. ИВИ 25, измеряющий длительность переднего фронта δ1, запускается передним фронтом сигнала АП 7 и останавливается передним фронтом сигнала ДАП 10 фиг.6б, г. ИВИ 26, измеряющий длительность заднего фронта δ2, запускается инвертированным задним фронтом сигнала ДАП 10 и останавливается инвертированным задним фронтом сигнала АП 7 фиг.6и, к. Коды длительностей δ1 и δ2 (фиг.6д, л) поступают на ЦП 14, который вырабатывает логическую "1", если длительность фронта не более δn, равной типовой длительности фронтов сигналов РТС данного диапазона частот, и логический "0" в противном случае. Сигнал скользящей помехи нарастает и спадает в приемном канале сравнительно плавно, поэтому на выходах ЦП 14 будут сформированы "0". ИДС 11 функционирует аналогично ИДФС 13. Скорость "скольжения" помехи обычно выбирается такой, чтобы в приемных каналах подавляемых РЛС формировались сигналы, длительности которых τи были близки к длительности зондирующих сигналов РЛС. Поэтому ИДС 11 зафиксирует значение τи большее τп, где τп - среднее значение длительности шумовых выбросов в приемном канале с шириной полосы Δf ОПК 1=Δf БПК 2=Δf БПК 3 при типовых для работы анализатора соотношениях помеха/порог обнаружения. Учитывая изложенное, ЦП 12, вырабатывающий "0" при τи≤τп и "1" в противном случае, выработает "1". Признак и направление перестройки помехи определяются ИЧВСФ 15, ФСС 29 и ФСС 30 которого фиг.3 служат для анализа помех, скользящих "вниз" и "вверх" соответственно. Процесс анализа поясняется временной диаграммой работы ФСС 29 фиг.7. Выходные сигналы АП 7, АП 8, АП 9 поступают соответственно на I, III, II входы ФСС 29 (фиг.3 и фиг.7б, а, в), где они инвертируются инверторами 40, 38 и 39 фиг.7г, д, е. Передними и инвертированными задними фронтами сигналов I и III входов запускаются соответственно ИВИ 31, 32, 33, 34 которые останавливаются соответственно передними фронтами сигналов II и I входов и инвертированными задними фронтами сигналов этих же входов фиг.7ж, и, к, л. Коды частотно-временных сдвигов δ11, δ12, δ21, δ22 (фиг.5) между передними и задними фронтами сигналов БПК 3 и ОПК 1, а также ОПК 1 и БПК 2 выдаются в блок цифровых порогов ЦП 16. Параллельно компараторы 35-37 (фиг.3) определяют абсолютные значения разностей |δ11-δ1,2|, |δ11-δ21| и |δ22-δ21|, которые также выдаются в ЦП 16. В силу вышеоговоренных ограничений скорости перестройки ("скольжения") помехи значения δ11, δ12, δ21, δ22 должны быть не менее некоторой величины Δ1, определяемой полосой пропускания Δfпр и разносом приемных каналов по частоте. В рассматриваемом случае при симметричном разносе БПК 1 и БПК 2 относительно ОПК 1


ЦП 16 сравнивает δ11, δ12, δ21, δ22 с Δ1, а
|δ11-δ12|, |δ11-δ21| и |δ22-δ21| с Δ2 и
в случае, если выполняются условия, оговоренные формулами 1 и 2, формирует на своих выходах логические "1" и выдает их в ЛФУС 17 фиг.1. Перечень анализируемых параметров, логика работы пороговых устройств и совокупность логических сигналов на выходах порогов (на входах ЛФУС 17) при анализе помех различаемых типов приведены в таблице 1 фиг.8. Процесс выработки сигнала управления поясняется фиг.4, где приведена структурная схема ЛФУС 17, на которой символами "1" и "0" условно обозначены сигналы на входах и выходах всех его элементов при анализе скользящей "сверху вниз" помехи. Совокупность сигналов на выходе ЛФУС 17 при анализе помех различаемых типов приведена в табл.2
|
Предлагаемый анализатор обеспечивает распознавание типа помехи (шумовая, импульсная, скользящая) практически в реальном масштабе времени и разделение совокупности принимаемых сигналов на полезную и помеховую составляющие. Это позволяет оптимизировать перестройку параметров зондирующих сигналов в активных РЛС и повысить эффективность их функционирования в сложной помеховой обстановке. При использовании анализатора в качестве предварительного фильтра в составе пассивной РЛС улучшаются показатели качества обнаружения - вероятность правильного обнаружения (Pп.о.) и вероятность ложной тревоги (Pл.т.) за счет исключения из обработки помеховой составляющей входного потока сигналов. Расчет получаемого выигрыша произведем на примере использования анализатора совместно с перспективной пассивной РЛС ГК1.640.013, серийно выпускаемой предприятием, в состав которой должен быть введен данный анализатор помех. Параметры пассивной РЛС: полоса пропускания одного приемного канала Δfпр=10 МГц; частотная разность между каналами Δfр=10 МГц; неидентичность амплитудно-частотных характеристик приемных каналов - 3 дБ; полоса одновременно принимаемых частот - 100 МГц; точность поддержания порога обнаружения системой ШАРУ - 3-4 дБ; среднее время обработки одного импульса 1 мс.
Оценим вероятность правильного выделения (Pп.в) помеховых сигналов в наиболее сложном случае - при воздействии скользящей шумовой помехи. В этом случае
Pп.в=Pпр.3×PΔ1×PΔ2,
где Pпр.3 - вероятность приема помехи тремя приемными каналами;
PΔ1 - вероятность сдвига одноименных фронтов сигналов в боковых каналах относительно основного на величину не менее Δ1;
PΔ2 - вероятность того, что разность сдвигов задних и передних фронтов сигналов основного и первого бокового каналов и второго бокового и основного каналов не более Δ2.
Типовая станция скользящих помех обеспечивает излучение шумового сигнала с полосой Δfп≈10 МГц при скорости перестройки γ=5÷50 МГц/мкс в диапазоне 200-1000 МГц, что вызывает на входе подавляемых РЭС поток случайных импульсов интенсивностью Λ=5÷50 кГц. Сравнительно узкий спектр помехи позволяет создавать мешающие излучения с высокой спектральной плотностью мощности, что дает право считать вероятность приема помехи тремя каналами Pпр.3 величиной, близкой к 1. Из-за неравномерности амплитудно-частотных характеристик передатчика помех и неидентичности приемных трактов пассивной РЛС возможны пропуски сигналов помехи одним из каналов. С достаточным запасом можно принять, что вероятность приема помехи основным и одним из боковых каналов 0,95; тогда Pпр.3=(0,95)2=0,9.
Минимальный сдвиг одноименных фронтов Δфр.min. с учетом случайного характера модуляции помехи выразится в виде
 .
.
Разность сдвигов передних и задних фронтов сигналов бокового и основного каналов есть не что иное, как разность длительностей сигналов помехи τп в этих каналах. Максимальная длительность τп.max составляет
При выборе значений Δ1=0,3 мкс и Δ2=4 мкс величины PΔ1 и PΔ2 можно положить равными 1. При этом Pп.в=0,9; т.е. 90% помеховых сигналов будет исключено из обработки.
Оценим вероятность ложного срабатывания анализатора - исключение из обработки полезного сигнала. При этом рассмотрим два характерных случая.
1. Разведка в отсутствии помех. Для срабатывания анализатора необходимо выполнение следующих условий:
- одновременное нахождение в главном лепестке диаграммы направленности антенны пассивной РЛС не меньше 3-х однотипных РЛС;
- сдвиг несущих частот РЛС на величину Δfпр;
- пространственный разнос РЛС и синхронизация моментов их излучения таким образом, чтобы их сигналы приходили на вход пассивной РЛС с задержкой от 0,3 до 4 мкс.
Очевидно, вероятностью такого события можно пренебречь.
2. Разведка сигналов одной РЛС на фоне широкополосной помехи (Δfп>3Δfпр+2Δfр). В этом случае одновременно с приемом полезного сигнала основным каналом возможно наличие шумовых выбросов в боковых каналах, удовлетворяющих критериям срабатывания анализатора.
Обычно частота ложных тревог в канале, обусловленная собственными шумами, устанавливается 3-5 Гц. При наличии помехи с учетом точности ШАРУ величина л.т. может достигать значений 5-20 кГц. (Tmin=50 мкс). При этом средняя вероятность наличия шумовых выбросов на интервале анализа (4 мкс) в обоих боковых каналах не более (4/50)2=0,006; т.е. потери полезных сигналов составят 6%, что практически не сказывается на величине вероятности правильного обнаружения.
В результате проведенных исследований установлено, что при воздействии на станцию случайного потока импульсов интенсивности Λ=0,2-0,5 кГц характеристики обнаружения практически не меняются. При интенсивности Λ=20-50 кГц величина Pп.о. уменьшается с 0,9 до 0,4, а Pл.т. увеличивается с 0,02 до 0,6. Следовательно, использование анализатора, подавляющего 90% помеховых сигналов, позволяет сохранить параметры обнаружения пассивной РЛС в условиях воздействия помех. Этот же эффект может быть достигнут также путем усложнения алгоритма разделения сигналов и увеличения в 2-3 раза быстродействия и объемов МОЗУ ЭЦВМ, осуществляющей эту операцию. Это может быть достигнуто, например, за счет использования еще одной ЭЦВМ, аналогичной примененной в станции. Проработка схемно-технических решений показывает, что предлагаемый анализатор частотно-временных параметров сигналов помех может быть реализован на элементах 133 серии в объеме 12-15 стандартных кассет и занимающих объем с учетом блоков питания не более 10% от объема ЭЦВМ.
Цифровой обнаружитель пачек периодических импульсных сигналов
Устройство пеленгования и анализа сигнала импульсных рлс с коммутационным объединением приемных каналов
Перестраиваемый генератор свч
Бортовая станция определения координат движущихся источников излучения
Устройство управления частотной настройкой приемника
Пеленгатор систем пассивного целеуказания
Устройство для обработки сигналов радиолокационного маяка-ответчика
Цифровое устройство когерентной обработки
Устройство для отождествления целей
Имитатор радиолокационной цели

