Результат интеллектуальной деятельности: СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ
Вид РИД
Изобретение
Настоящее техническое решение относится к области автоматизированного видеонаблюдения за охраняемыми объектами и распознавания образов и ситуаций.
Известна система [1] автоматизированного видеонаблюдения и распознавания объектов и ситуаций, содержащая, по меньшей мере, одну видеокамеру, терминал наблюдения и, по меньшей мере, одно вычислительное устройство с памятью, реализованное на компьютере, выполняющем программно функции устройства распознавания цели, соединенном с видеокамерой, а также, по меньшей мере, одну подвижную видеокамеру, выполненную с возможностью наведения на цель путем поворота в вертикальной и горизонтальной плоскости и изменения фокусного расстояния, в зависимости от получаемого от устройства распознавания цели управляющего сигнала.
Недостатком данной системы видеонаблюдения является ее сложность при контроле больших по площади охраняемых территорий и наличии на них большого числа многоэтажных зданий и сооружений, что требует размещения большого количества стационарных и подвижных видеокамер, средств управления и организации сложной локальной вычислительной сети.
Известна также система [2] видеонаблюдения с транспортного средства, находящегося в движении, содержащая установленную на транспортном средстве видеокамеру, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлен датчик измерения направления его перемещения, соединенный с компьютером транспортного средства, к которому подключен привод горизонтального и вертикального перемещения, соединенный с управляющим входом видеокамеры, при этом транспортное средство содержит дополнительно несколько видеокамер, подключенных к компьютеру через мультиплексор.
Недостатками этой системы видеонаблюдения с транспортного средства, находящегося в движении являются: недостаточная точность определения координат транспортного средства и выделенных объектов и связанная с этим низкая надежность контроля, так как их координаты определяются с помощью глобальной навигационной системы и отсутствие сигнала спутниковой навигации (например, в радио-тени деревьев, крытых навесов и т.п.) приведет к неопределенности обозначения места положения транспортного средства; отсутствие четко выраженной траектории движения транспортного средства; ограниченность площади контролируемой (охраняемой) территории одним транспортным средством и невозможность организации контроля на сложной территории, содержащей множество стационарных объектов, включающих здания и всевозможные сооружения.
Наиболее близкой к предлагаемой системе видеонаблюдения с транспортного средства, находящегося в движении является система [3] видеонаблюдения с транспортного средства, находящегося в движении, содержащая несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру (высокого разрешения) с возможностью изменения ее фокусного расстояния, и(или) изменения диафрагмы, и(или) настройки на фокус для обеспечения наведения на цель, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации соединенные с компьютером транспортного средства, к которому подключены первые приводы горизонтального и вертикального перемещения видеокамеры (высокого разрешения), выходы которых соединены с соответствующими входами первой пары датчиков горизонтального и вертикального углов поворота своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых, с перекрывающимися секторами обзора, образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения, а одна из дополнительных видеокамер оборудована вторыми приводами горизонтального и вертикального перемещения, управляющие входы которых соединены с компьютером, а вторые выходы подключены к соответствующим входам второй пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру.
Недостатком этой системы видеонаблюдения с транспортного средства, находящегося в движении является возможность возникновения ситуаций неопределенности в определении стороны обхода при встрече транспортного средства с непреодолимыми препятствиями в процессе его движения по заданной траектории.
Целью изобретения является исключение ситуаций неопределенности при встрече транспортного средства с непреодолимыми препятствиями.
Для достижения поставленной цели в систему видеонаблюдения с транспортного средства, находящегося в движении, содержащей несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру (высокого разрешения) с возможностью изменения ее фокусного расстояния, и(или) изменения диафрагмы, и(или) настройки на фокус для обеспечения наведения изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации соединенные с компьютером транспортного средства, к которому подключены первые приводы горизонтального и вертикального перемещения видеокамеры (высокого разрешения), выходы которых соединены с соответствующими входами первой пары датчиков горизонтального и вертикального углов поворота своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых, с перекрывающимися секторами обзора, образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют первую систему стереонаблюдения, а одна из дополнительных видеокамер оборудована вторыми приводами горизонтального и вертикального перемещения, управляющие входы которых соединены с компьютером, а вторые выходы подключены к соответствующим входам второй пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру, введены две пары видеокамер, составляющих дополнительно вторую и третью системы стереонаблюдения, расположенных под разными углами относительно первой системы стереонаблюдения. При этом сектора обзора каждой системы стереонаблюдения и их перекрытие выбираются каким образом, чтобы общий сектор обзора был максимально близок к 180°.
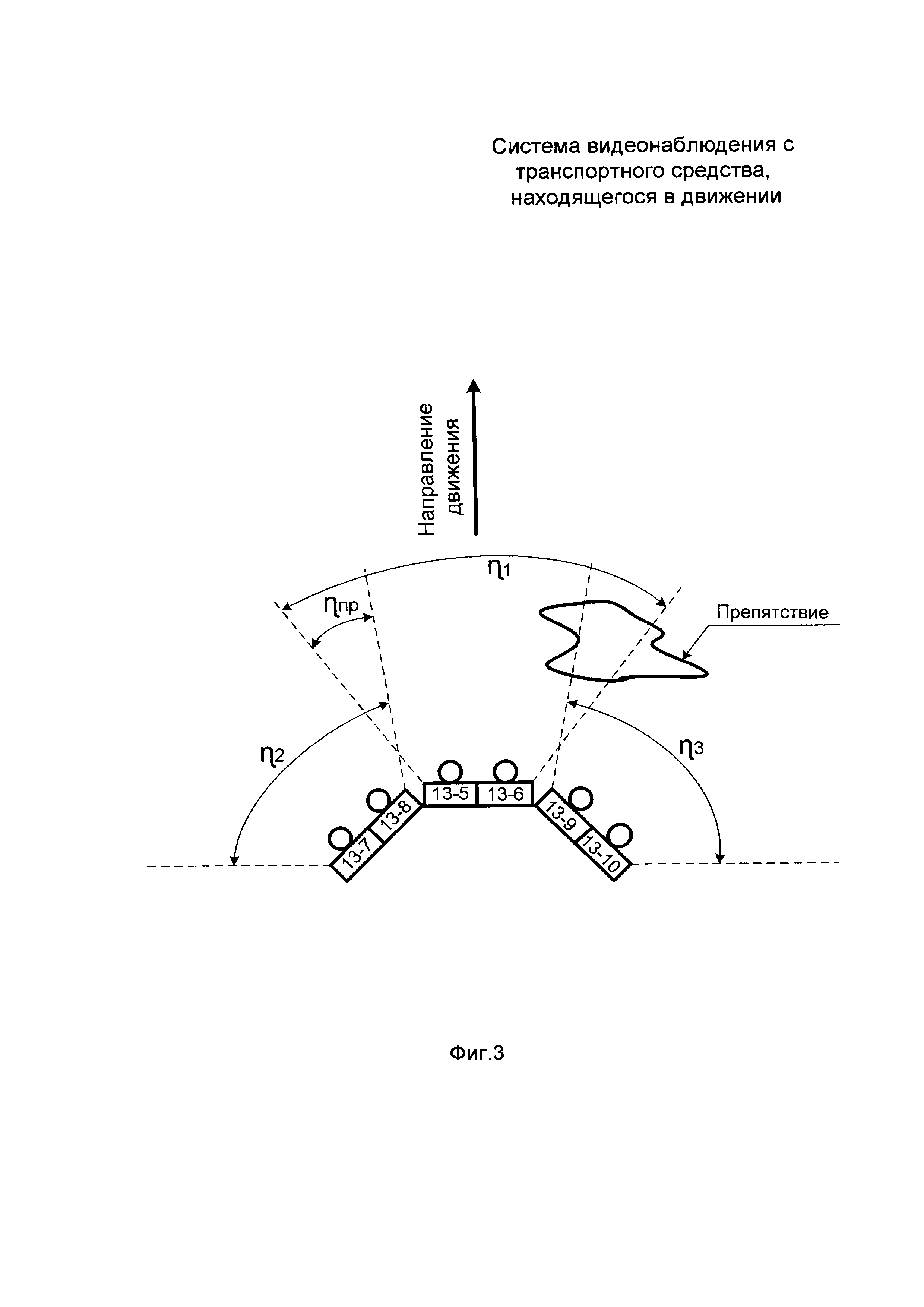
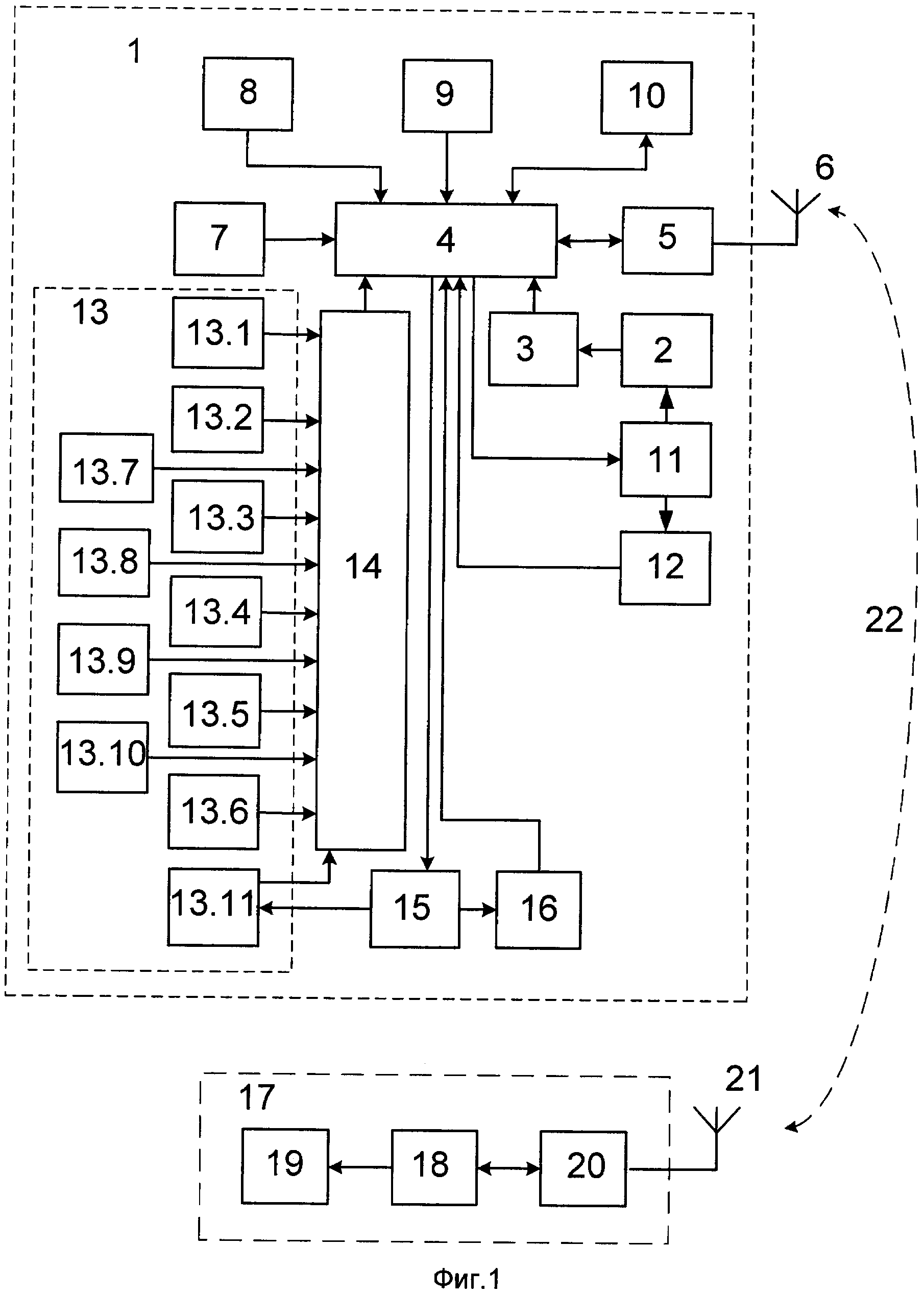
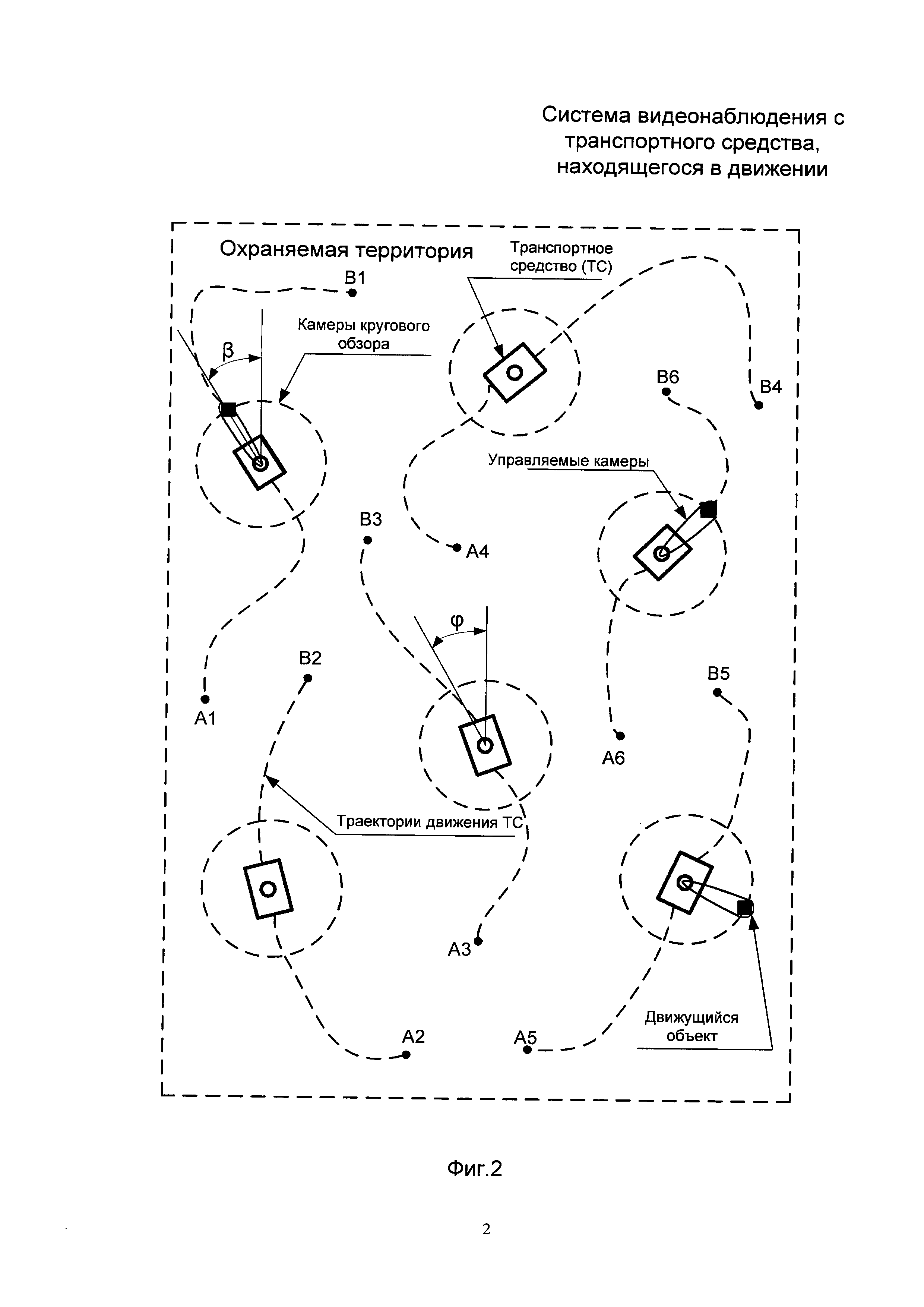
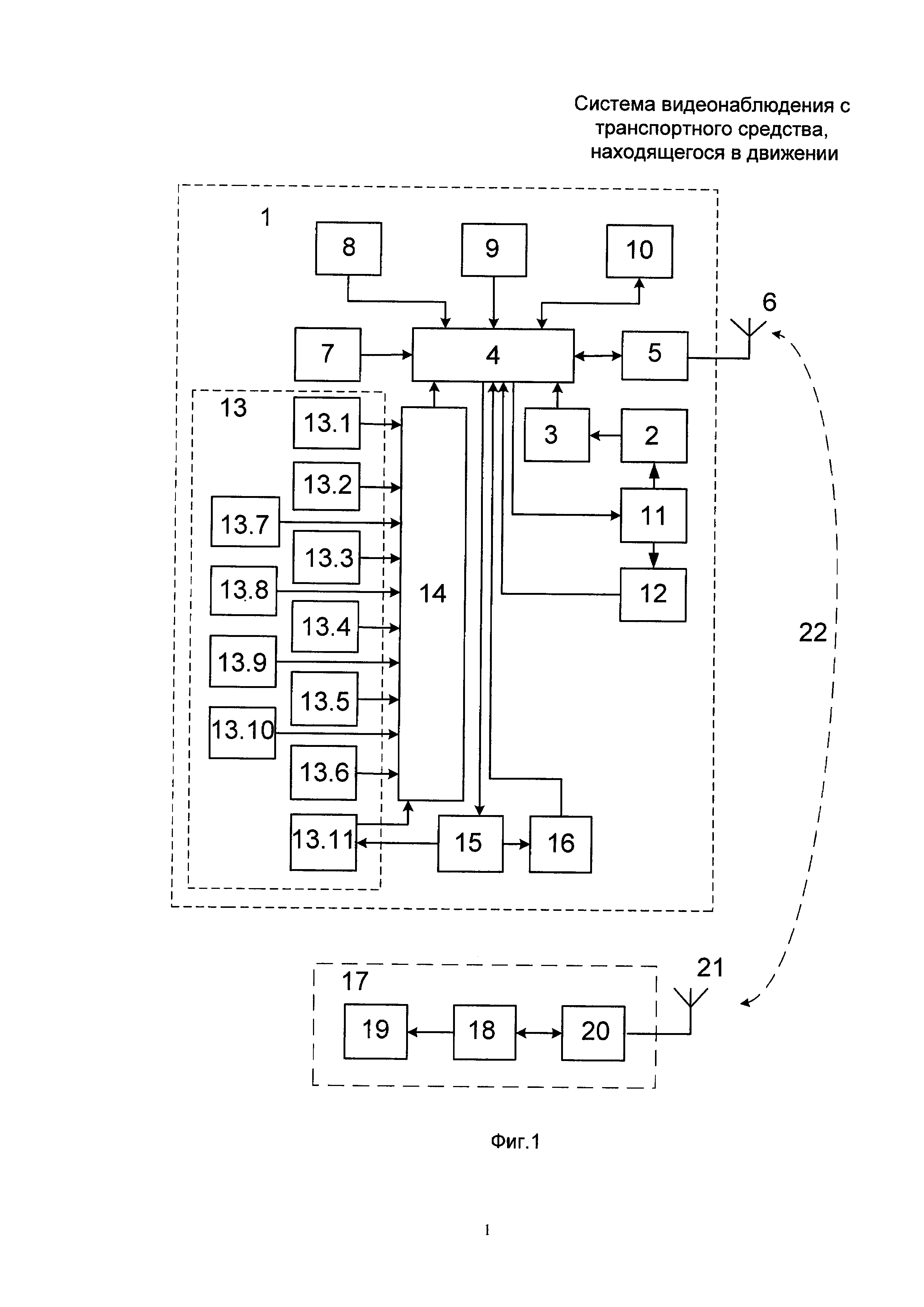
Сущность изобретения поясняется на чертежах (фиг. 1, фиг. 2 и фиг. 3), где на фиг. 1 приведена структурная схема системы на примере одного транспортного средства, на фиг. 2 – принцип ее работы с использованием нескольких транспортных средств, а на фиг. 3 – и принцип исключения неопределенности при встрече транспортного средства с непреодолимыми препятствиями в процессе его движения по заданному маршруту.
На каждом транспортном средстве 1 (фиг. 1), число которых выбирается с учетом сложности и протяженности охраняемой территории, установлена видеокамера 2, с возможностью изменения фокусного расстояния, и(или) изменения диафрагмы, и(или) настройки на фокус для обеспечения наведения на цель, подключенная через плату видеоввода 3 к компьютеру 4, к которому подключено приемно-передающее устройство 5 транспортного средства с антенной 6. К компьютеру 4 также подключены датчик 7 измерения направления перемещения (компас или гироскоп), датчик 8 пройденного пути (одометр), ультразвуковой локационный датчик 9 и устройство 10 тревожной сигнализации (сирена и проблесковый фонарь). Видеокамера 2 также оборудована первыми приводами 11 горизонтального и вертикального поворота, ко вторым выходам которых подключена первая пара датчиков 12 горизонтального и вертикального углов поворота видеокамеры 2. Выходы датчиков 12 горизонтального и вертикального углов поворота и управляющие входы приводов 11 горизонтального и вертикального поворота видеокамеры 2 подключены к компьютеру 4, к которому также подключены дополнительные видеокамеры 13 через мультиплексор 14.
Из числа дополнительных видеокамер 13, например, четыре (13.1-13.4) образуют устройство кругового видеообзора (расположенные на штанге корпуса транспортного средства) с фиксацией движущихся объектов и их координат, шесть видеокамер (13.5-13.10), устанавливаемые в передней части транспортного средства), образуют три системы стереонаблюдения с перекрывающимися секторами обзора (см. фиг. 3), для фиксации непреодолимых препятствий, мешающих передвижению транспортного средства по заданному маршруту и одна управляемая видеокамера 13.11 кругового обзора, обеспечивающая «обучение» транспортного средства и его последующее движение по заданному маршруту. Причем управление видеокамерой 13.11 осуществляется от компьютера 4 через вторые приводы 15 горизонтального и вертикального поворота, к вторым выходам которых подключена вторая пара датчиков 16 горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру 4.
На командном пункте 17 находится компьютер 18 командного пункта, к которому подключен монитор 19 наблюдения и приемно-передающее устройство 20 командного пункта с антенной 21. Связь между антенной 6 транспортного средства и антенной 21 командного пункта осуществляется по радиоканалу связи 22.
Перед практическим применением системы видеонаблюдения проводят подготовку охраняемой территории (см. фиг. 2) и «обучение» каждого транспортного средства для его автономного движения по заданному маршруту. С этой целью на карте-схеме охраняемой территории прокладывают траектории движения от точки А до точки В каждого транспортного средства системы видеонаблюдения и выбирают их количество (на фиг. 2, в качестве примера, представлены шесть транспортных средств) с таким расчетом, чтобы обеспечить контроль за каждым участком возможного проникновения злоумышленников на охраняемую территорию. Далее оператор со своим компьютером поочередно подключается к компьютеру 4 каждого транспортного средства и уже на местности (управляя транспортным средством со своего компьютера) проводит транспортное средство по заданному маршруту (траектории) периодически (через определенные расстояния) останавливаясь и фиксируя с помощью управляемой видеокамеры 13.11 опорные объекты (здания, деревья, фонари и т.п.). Видеоизображения опорных объектов, фиксируемые компьютером 4 «обучаемого» транспортного средства через заданные расстояния, и соответствующие им углы поворота ϕ дают возможность вычислить и запомнить в памяти компьютера 4 траекторию движения, по которой «обученное» транспортное средство в дальнейшем будет осуществлять самостоятельное движение.
В процессе движения транспортного средства по заданной траектории камеры 13.1-13.4 кругового обзора (каждая в своем секторе) фиксируют наличие на охраняемом участке движущихся объектов и, при их обнаружении, компьютер 4, с помощью привода 11 горизонтального и вертикального поворота наводит видеокамеру 2 высокого разрешения на обнаруженный движущийся объект.
При идентификации с помощью видеокамеры 2 в движущемся объекте человека компьютер 4 транспортного средства дает команду на устройство 10 тревожной сигнализации для включения сирены и проблескового фонаря. Одновременно, по горизонтальному углу β и расстоянию до человека, вычисляемого компьютером 4 исходя из заданного среднего роста человека и вертикального угла поворота видеокамеры 2 высокого разрешения (на фиг. 2 не показан), определяются координаты нарушителя, которые посредством приемно-передающих устройств 5 и 20 передаются на командный пункт 17 для отображения на мониторе 19 возникшей ситуации и принятия решения.
В случае появления на пути следования транспортного средства посторонних непреодолимых препятствий они сначала обнаруживаются первой системой стереонаблюдения, составленной из видеокамер 13.5 и 13.6 с сектором обзора η1 (см. фиг. 3) и идентифицируются как непреодолимые ультразвуковым локационным датчиком 9. Для решения вопроса о направлении обхода препятствия компьютер 4 транспортного средства анализирует информацию, поступающую со второй системы стереонаблюдения, образованную видеокамерами 13.7, 13.8 с сектором обзора η2, и третьей системы стереонаблюдения, образованной видеокамерами 13.9, 13.10 с сектором обзора η3, и направляет транспортное средство в сторону, где отсутствуют дополнительные препятствия. При этом сектора обзора η1, η2 и η3 систем стереонаблюдения и угол (сектор) их перекрытия ηпр, исходя из технических возможностей, выбираются таким образом, чтобы общий сектор обзора был максимально близок к 180°, чтобы, например, исключить столкновение транспортного средства по ходу движения с параллельно стоящей стеной (слева или справа). А угол (сектор) перекрытия ηпр выбирается с таким расчетом, чтобы имелась возможность фиксации небольших по размерам предметов (камни, пни спиленных деревьев и т.п.) двумя системами стереонаблюдения одновременно.
После обхода препятствия транспортное средство, ориентируясь по ранее отмеченным опорным точкам, вновь выходит на заданную траекторию движения.
Литература
1 Патент RU 2268497 С2 (аналог). Система и способ автоматизированного видеонаблюдения и распознавания объектов и ситуаций. Опубликовано в БИ №02 от 20.01.2006 г.
2 Патент RU 2326445 С2 (аналог). Способ и система видеонаблюдения с транспортного средства, находящегося в движении. Опубликовано в БИ №16 от 10.06.2008 г.
3 Патент RU 106785 U1 на полезную модель (прототип). Система видеонаблюдения с транспортного средства, находящегося в движении. Опубликовано 20.07.2011 г.
Способ получения лигатуры алюминий-скандий
Электролитический способ непрерывного получения алюминиевого сплава со скандием
Способ получения порошков из наночастиц карбида кремния, покрытых углеродной оболочкой
Способ получения лигатурного сплава алюминий-бор
Робот-снегоуборщик
Способ получения 17,17-этилендиоксиандроста-1,4-диен-3-она
Система для контроля утечки газа из магистральных газопроводов
Система раздельного сбора и транспортировки мусора
Способ непрерывного получения алюминиевой лигатуры с 2 мас. % скандия
Мобильное устройство для уничтожения комаров
Способ получения лигатуры алюминий-скандий
Электролитический способ непрерывного получения алюминиевого сплава со скандием
Способ получения порошков из наночастиц карбида кремния, покрытых углеродной оболочкой
Способ получения лигатурного сплава алюминий-бор
Робот-снегоуборщик
Способ получения 17,17-этилендиоксиандроста-1,4-диен-3-она
Система для контроля утечки газа из магистральных газопроводов
Система раздельного сбора и транспортировки мусора
Способ непрерывного получения алюминиевой лигатуры с 2 мас. % скандия
Способ электролитического получения алюминия

