Результат интеллектуальной деятельности: Способ и система автоматического управления
Вид РИД
Изобретение
Предлагаемые изобретения относятся к автоматике и могут быть использованы в чистых помещениях для поддержания постоянной оптимальной температуры.
Известен способ автоматического управления системами, включающий в себя использование командных и фактических величин выходных переменных для регулирования управляемой системы [Носов Г.Р. и др. Автоматика и автоматизация мобильных сельскохозяйственных машин. - К.: Высшая школа., 1984, с. 171]. Для его осуществления известно устройство, включающее в себя соединенные в блоки элементы преобразования и усиления выходной переменной управляемого объекта, а также блок для измерения возмущенного воздействия на управляемом объекте.
Недостатком способа и устройства является низкая эффективность из-за недостаточной точности управления переходными процессами при требуемом быстродействии.
За прототип принят способ автоматического управления системами [патент РФ №2153697, G05B 17/00, 2000, Фурунжиев Р.И.], при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с величиной выходной переменной исполнительного механизма и командной величиной выходной переменной управляемого объекта используют для формирования управляющего сигнала, который подают на вход исполнительного механизма, причем дополнительно используют отрицательную обратную связь по выходной переменной исполнительного механизма, что измеряют скорость и ускорение изменения фактической величины выходной переменной управляемого объекта и подают ее на вход блока формирования желаемых свойств движения выходной переменной управляемого объекта вместе с фактической величиной выходной переменной управляемого объекта и величиной выходной переменной исполнительного механизма.
В регуляторе, включающем в себя объединенные в блоки элементы преобразования и усиления скорости сигнала управляемого объекта, каналы измерения величины, скорости и ускорения выходной переменной которого связаны со входами регулятора, выход которого связан со входом исполнительного привода, выход последнего связан со входом управляемого объекта, имеются признаки: каналы измерения выходной переменной скорости и ускорения управляемого объекта связаны со входами блока, формирующего желаемые свойства движения выходной переменной управляемого объекта.
Прототипы обладают существенными недостатками: невозможностью автоматизации в адаптивном диапазоне из-за необходимости ручной настройки коэффициента регулирования по субъективной мере оценки. Аппаратно управляемый коэффициент регулирования существенно снижает универсальность использования способа и устройства и их метрологическую эффективность за счет высокой методической и динамической погрешности.
Технической задачей предлагаемого решения является автоматизация регулирования системами в адаптивном диапазоне с помощью гибкого коэффициента регулирования за счет тождественности исследуемой погрешности нормируемому эквиваленту желаемой погрешности.
Поставленная задача достигается тем, что
1. в способе автоматического управления системами, при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной управляемого объекта используют для формирования управляющего сигнала, который подают на вход исполнительного механизма за счет использования отрицательной обратной связи по выходной переменной управляемого объекта. В отличие от прототипа, коэффициентом автоматически управляют в адаптивном диапазоне регулирования за счет тождественности исследуемой погрешности нормируемому эквиваленту желаемой погрешности, которую адаптируют по диапазону при сравнении в каждый момент времени произведения величин входной Е и выходной U переменных с нормированным эквивалентом их максимальных величин. Нормированный эквивалент соответствует степенному полиному средней арифметической величины командной входной и выходной переменных управляемого объекта.
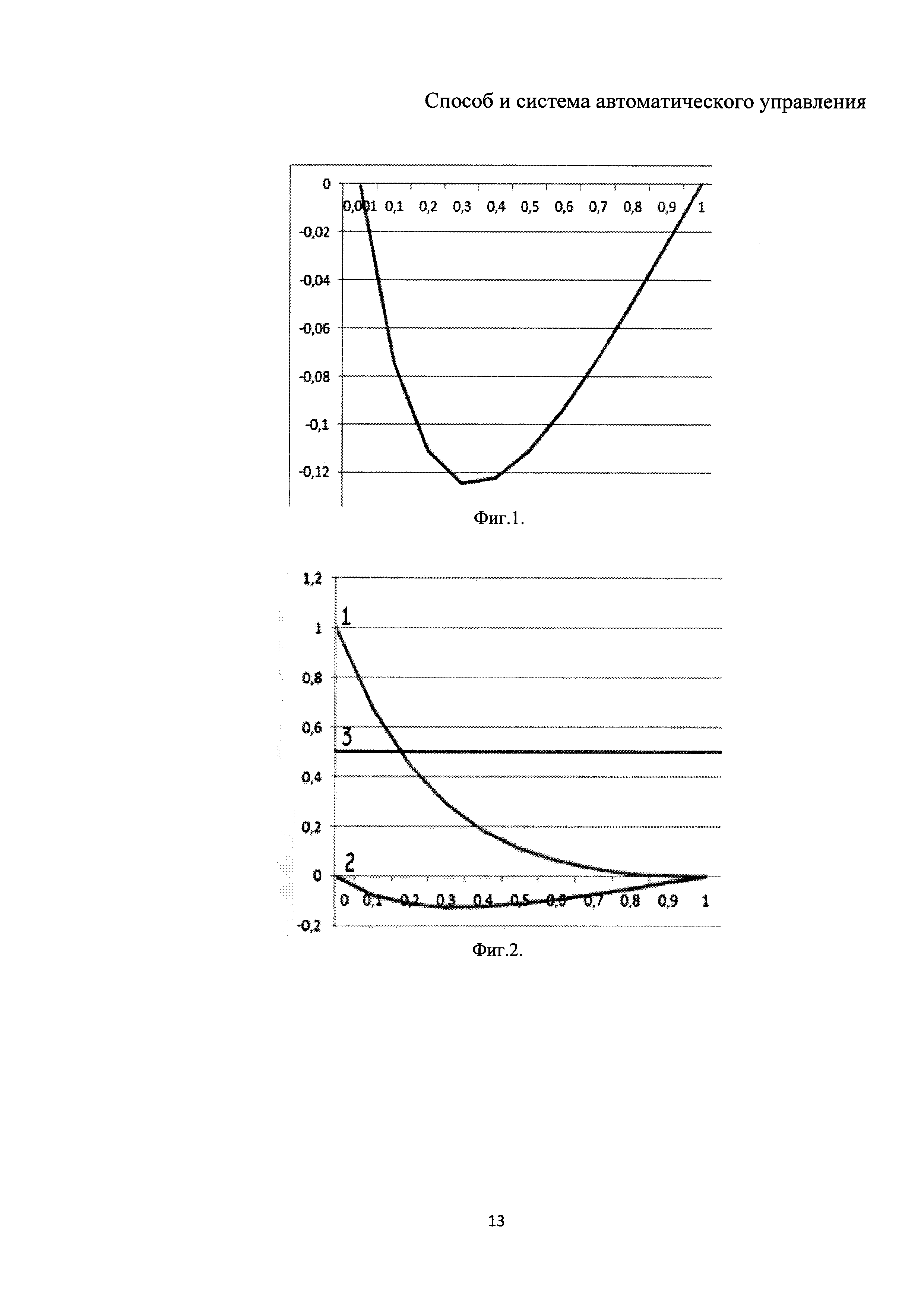
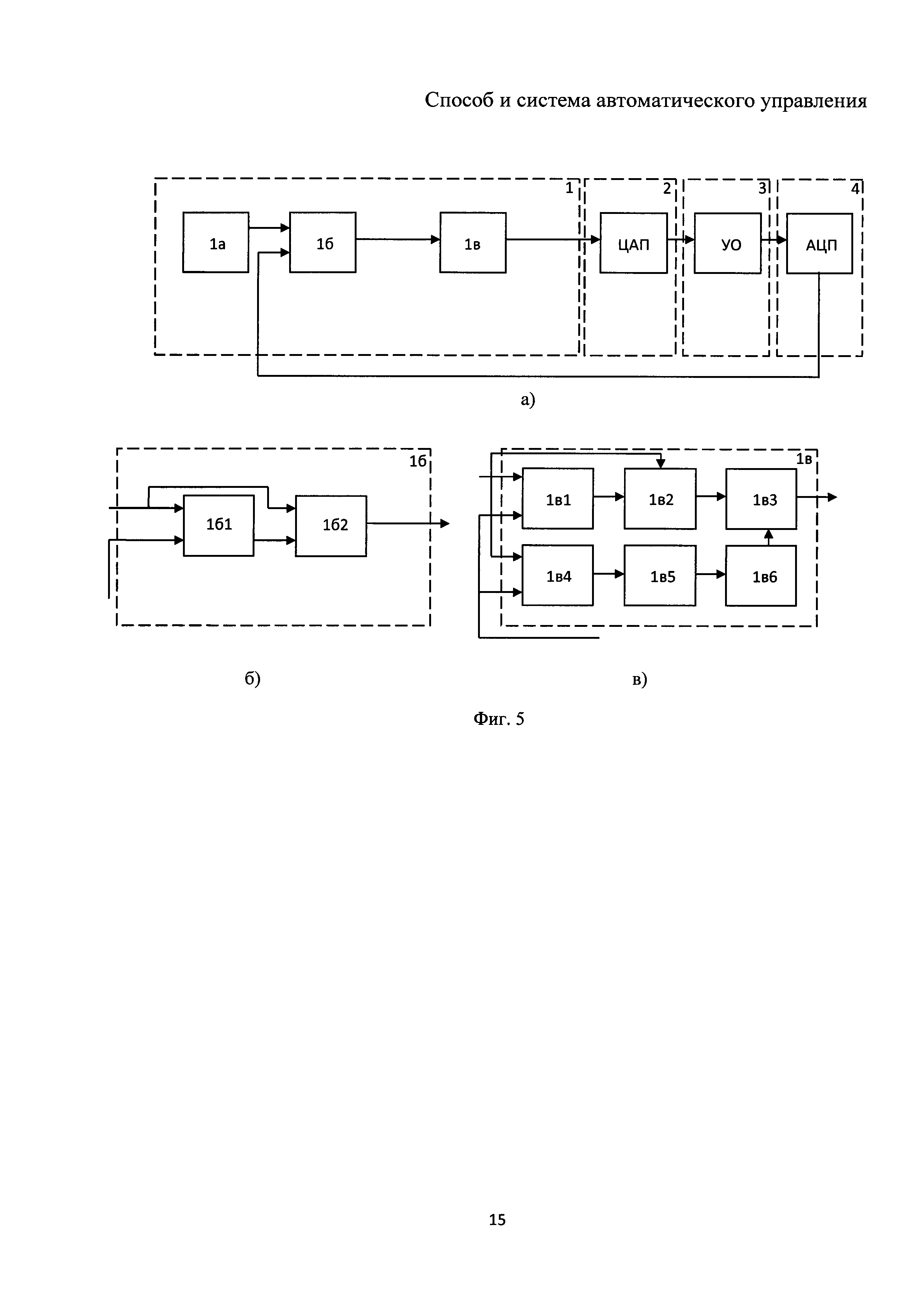
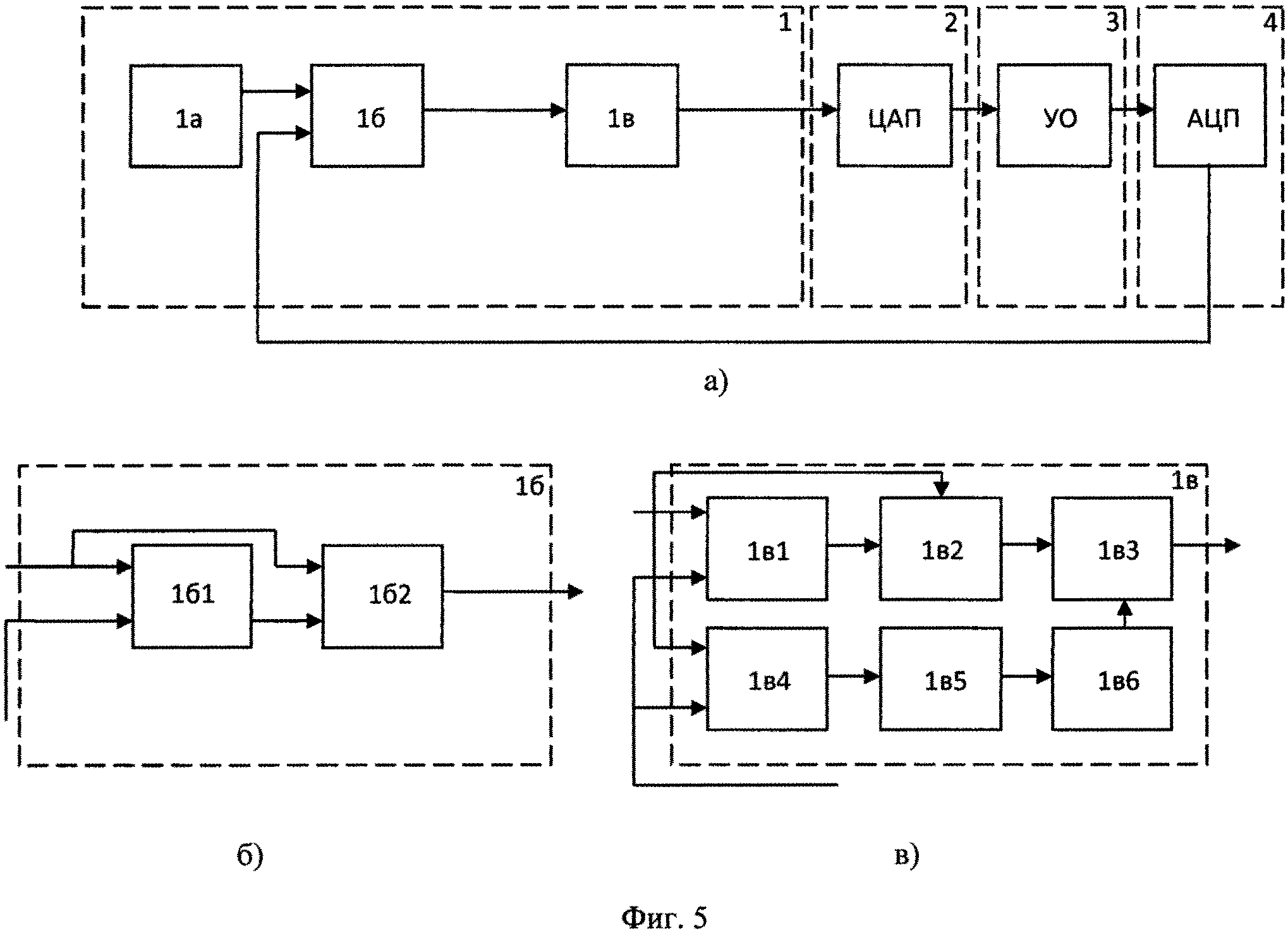
Способ поясняют фиг. 5, на которых представлены структуры устройства на уровне структурной и функциональной схем. Зависимости амплитудно-временных динамических характеристик U и погрешности ε от вида управляющего воздействия показаны на фиг. 1-2.
В предлагаемом способе автоматического управления системами выходную переменную ε(E, U)=ε исполнительного механизма находят по формуле:

где k - коэффициент регулирования.
Для выявления закономерностей коэффициента k введем соотношение U=E/m, которое сокращает число переменных П-регулирования, при этом погрешность (1) будет равна:

Нормированный эквивалент представляет собой симметричный критерий регулирования, позволяющий проводить регулирование с автоматическим поиском коэффициента в адаптивном диапазоне контроля.
Выходную переменную ε(E, U)=ε подают на вход управляемого объекта, измеряют фактическую величину U выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной Е управляемого объекта используют для формирования управляющего сигнала ε(U2, E)=ε. Для двух сигналов i=1,2 нормированной уставки U1=Е и измеряемого U2=U выражение приводится к квадратичной оценке: 
Суть симметричного мультипликативного критерия (СМК) заключается в нормировании произведения случайных сигналов  тождественно максимальному эквиваленту
тождественно максимальному эквиваленту  . С изменением адаптивного диапазона случайным образом по тому же правилу изменяется произведение случайных переменных Ui и их тождественность нормируемому эквиваленту, оптимально отражающему гибкость адаптации диапазона автоматического контроля.
. С изменением адаптивного диапазона случайным образом по тому же правилу изменяется произведение случайных переменных Ui и их тождественность нормируемому эквиваленту, оптимально отражающему гибкость адаптации диапазона автоматического контроля.
СМК Q позиционного регулирования представлен отношением произведений  случайных i-тых сигналов Ui к нормированному максимуму
случайных i-тых сигналов Ui к нормированному максимуму
реализуемому средним арифметическим XCA в степени n по числу i=1, n сигналов управления.
Относительная погрешность εn СМК-регулирования соответствует соотношению
Управляющий сигнал подают на вход исполнительного механизма, причем используют отрицательную обратную связь по выходной переменной U управляемого объекта. Для автоматизации регулирования автоматически управляют в адаптивном диапазоне коэффициентом k=ε2/ε1 регулирования за счет тождественности исследуемой погрешности ε1 нормируемому эквиваленту ε2 желаемой погрешности:

Коэффициент регулирования находится из системы уравнений погрешности при стандартном критерии ε1 и гибком МСК ε2:
Уравнение для коэффициента k находится из отношений погрешностей:

Погрешность адаптируют по диапазону при сравнении в каждый момент времени произведения величин входной Е и выходной U переменных с нормированным эквивалентом их максимальных величин, соответствующим степенному полиному средней арифметической величины командной входной и выходной переменных управляемого объекта.
1. Выходную переменную ε исполнительного механизма 2 (фиг. 5а) подают на вход управляемого объекта 3, измеряют фактическую величину U выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной Е управляемого объекта в коде U2 используют для формирования управляющего сигнала ε(E, U2)=ε2. Его подают на вход исполнительного механизма 2, причем используют отрицательную обратную связь по выходной переменной U управляемого объекта 3. Для автоматизации регулирования в адаптивном диапазоне выходную переменную U управляемого объекта, преобразуют в код U2, подают на вход блока контроллера 1, управляющий сигнал ε которого соответствует желаемым свойствам выходной переменной U управляемого объекта. Управляющий сигнал ε реализуют мультипликативно-симметричным критерием (МСК) погрешности (4), соответствующему квадрату отношения разности (E-U) и суммы (E+U) командной входной Е и выходной U переменных управляемого объекта 3 и выполняющим роль автоматического регулятора. адаптируется по диапазону за счет оценки фактических величин входной Е и выходной U переменной к нормированному эквиваленту их максимальных max (Е, U) величин (3) в каждый момент времени. Автоматически управляют в адаптивном диапазоне коэффициентом k=ε2/ε1 регулирования за счет тождественности исследуемой погрешности ε1 нормируемому эквиваленту ε2 желаемой погрешности, которую адаптируют по диапазону при сравнении в каждый момент времени произведения величин входной Е и выходной U переменных с нормированным эквивалентом их максимальных величин, соответствующим степенному полиному средней арифметической величины командной входной и выходной переменных управляемого объекта.
адаптируется по диапазону за счет оценки фактических величин входной Е и выходной U переменной к нормированному эквиваленту их максимальных max (Е, U) величин (3) в каждый момент времени. Автоматически управляют в адаптивном диапазоне коэффициентом k=ε2/ε1 регулирования за счет тождественности исследуемой погрешности ε1 нормируемому эквиваленту ε2 желаемой погрешности, которую адаптируют по диапазону при сравнении в каждый момент времени произведения величин входной Е и выходной U переменных с нормированным эквивалентом их максимальных величин, соответствующим степенному полиному средней арифметической величины командной входной и выходной переменных управляемого объекта.
2. На фиг. 5а представлена структурная схема системы, отличающаяся тем, что исполнительным механизмом служит цифро-аналоговый преобразователь (2) и дополнительно введен аналого-цифровой преобразователь (4), включенный между выходом управляемого объекта (3) и информационным входом контроллера (1), который состоит из задатчика командной величины (1а), последовательно соединенных с ним по управляющему входу и информационному входу контроллера блоков задания исследуемой погрешности (16) и программно-управляемого коэффициента регулирования К* (1в), информационный выход которого служит выходом контроллера.
3. На фиг. 5в показана функциональная схема системы автоматического управления, отличающаяся тем, что блок программно-управляемого коэффициента регулирования контроллера состоит из сумматоров(1в1, 1в4), выходы которых соответственно соединены через первый (1в2) и второй (1в5) делители с блоком возведения в степень (1в6) и третьим делителем (1в3), связанным по второму входу с выходом блока возведения в степень, а по выходу - с информационным выходом блока программного управления коэффициента регулирования, управляющий вход которого объединен с одноименными входами второго делителя и сумматоров, информационные входы последних служат одноименным входом блока программно-управляемого коэффициента регулирования.
4. На фиг. 5б показана функциональная схема системы автоматического управления, отличающаяся тем, что блок задания исследуемой погрешности включает последовательное соединение алгебраического сумматора (1б1) и делителя (1б2), управляющий вход которого объединен с соответствующими входами сумматора и блока задания исследуемой погрешности ε1, информационным входом которого служит соответствующий вход сумматора, а выходом - выход делителя.
На схеме блока задания системы ε2 (фиг. 5в) выходную переменную Е блока задатчика командной величины подают на вход сумматоров 1в1. Измеряют фактическую величину выходной переменной U (тождественной цифровому эквиваленту U2), которую вместе с величиной входной переменной Е подают на сумматоров 1в4. Сигналы E-U и E+U подают на делители 1в2 и 1в5, а затем - на блок возведения в степень 1в6, которые используют для формирования управляющего сигнала ε (4). Параллельно сигнал E-U вместе с переменной Е подают на блок делителя 1в3, формируя сигнал ε1(U1, Е), которым делят управляющий сигнал ε2(U2, Е) с блока 1в6.
Блок 1 на фиг. 5а автоматическому регулятору, где автоматически управляют в адаптивном диапазоне коэффициентом k=ε2/ε1 регулирования за счет тождественности исследуемой погрешности ε1 нормируемому эквиваленту ε2 желаемой погрешности, которую адаптируют по диапазону при сравнении в каждый момент времени произведения величин входной Е и выходной U переменных с нормированным эквивалентом их максимальных величин, соответствующим степенному полиному средней арифметической величины командной входной и выходной переменных управляемого объекта 3. Сигнал U с управляемого объекта 3 преобразуют АЦП 4 в цифровой эквивалент (сигнал U2) и подают на вход сумматоров 1б.
Конкретное исполнение блоков может иметь следующие признаки (фиг. 5а): блок 1 является контроллером, необходим для задания сигнала Е и формирования управляющего сигнала ε(U2, E)=ε2. Блок 2 представляет собой исполняющий механизм (в виде ЦАП) для преобразования ε2 в аналоговый сигнал ε (4). Блок 3 является управляемым объектом. Сигнал U с выхода управляемого объекта 3 управления подается на вход АЦП 4, с которого сигнал в цифровом эквиваленте U2 поступает на блок контроллера (1).
Найдем оптимальную погрешность , для чего возьмем производную
, для чего возьмем производную выражения (2) и приравняем ее к нулю:
выражения (2) и приравняем ее к нулю:
Дифференцирование погрешности приводит к тождеству
из которого следует с учетом (2) оптимальная погрешность
Решение доказывает закономерность, что оптимальная  погрешность П-регулирования стремится к фиксируемому, вручную настраиваемому коэффициенту k:
погрешность П-регулирования стремится к фиксируемому, вручную настраиваемому коэффициенту k:

Следовательно, оптимальная погрешность  П-регулирования пропорциональна фиксированному k=Const коэффициенту, исключающему автоматическое регулирование из-за слепого поиска неизвестного алгоритма тождественности изменяющемуся диапазону рационального коэффициента в диалоговом режиме с оператором итерационным методом проб и ошибок.
П-регулирования пропорциональна фиксированному k=Const коэффициенту, исключающему автоматическое регулирование из-за слепого поиска неизвестного алгоритма тождественности изменяющемуся диапазону рационального коэффициента в диалоговом режиме с оператором итерационным методом проб и ошибок.
Автоматическое регулирование без участия оператора диктует гибкость коэффициента k, т.е. способность подстраиваться под адаптивный диапазон по целенаправленному алгоритму оптимизации.
Следовательно, алгоритм СМК-регулирования произведения амплитуд случайных сигналов, нормированных оптимальным эквивалентом для двух переменных, соответствует квадрату отношения их разницы к их сумме.
Заменим сигнал U соотношением U=E/m для сокращения переменных, тогда
после сокращения на норму Е, получаем

Докажем эффективность предлагаемого способа относительно прототипа по гибкости регулирования в адаптивном диапазоне, по повышению точности автоматического регулирования за счет снижения методической и динамической погрешности автоматического управления.
Для проведения качественного анализа алгоритма (5) оптимизации коэффициента k (m) систематизируем результаты в таблицу 1.

По табл. 1 построим график зависимости k от m.(фиг. 3), качественный анализ которого показывает, что экстремум функции k (m) достигает в точке m≈0,33, при этом k≈-0,125, а минимальные - в точках m≈0 и m=1, при этом k=0.
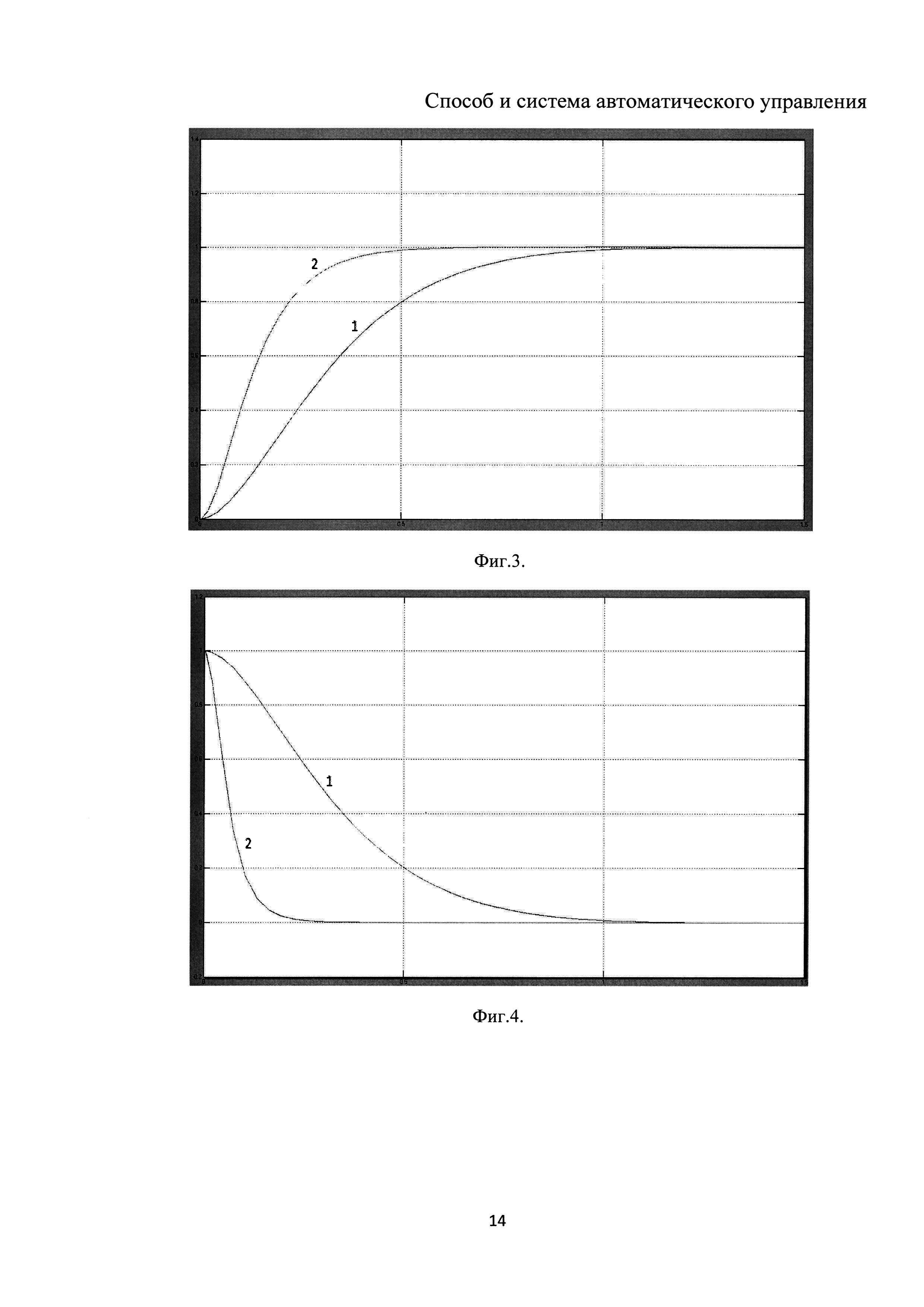
Для сравнения стандартного критерия εП с эквивалентом ε2 сведем в табл. 2 результаты зависимости k (m) и построим графики функций ε1 и ε2 (фиг. 4).

Анализ фиг. 4 показывает, что функция имеет минимумы в точках m=0 и m=1, а также экстремум функции k (m), настраиваемый автоматически и раскрывающий оптимальное значение коэффициента k. Из сравнения гибкого (2) и стандартного (не зависящего от m) критерия (3) следует, что стандартный критерий не позволяет находить значение k, оптимального для заданного диапазона, в отличие от эквивалентного критерия, адаптирующегося под диапазон регулирования. График коэффициента МСК имеет минимум в m=1, что подтверждает условие U=E/m, из чего следует, что при m=1 U=E. Значение функции ε2=1 в точке m=0 объясняется нулевым значением измеряемого сигнала U2=U=Q в начальный момент регулирования.
Результаты компьютерного моделирования зависимости амплитудно-временных динамических характеристик 1 и 2, соответствующих адаптивному и стандартному критериям, систематизированы на фиг. 1. Качественный анализ фиг. 6 показывает повышение эффективности выхода на режим характеристик от стандартного 1 до адаптивного 2 критерия. Для проведения количественного анализа на фиг. 7 зафиксируем значение t=0.2 и оценим значение погрешности при фиксированном времени (табл. 2).


Количественный анализ табл. 2 показывает снижение погрешности регулирования с 65% для стандартного 1 до 5% адаптивного 2 критерия. Погрешность адаптивного 2 в 13 раз лучше стандарта 1.
На фиг. 2 показаны графики погрешностей адаптивного критерия 2 и наиболее оптимально отрегулированного для k=0,3 стандартного 1 критерия. Для анализа оперативности зафиксируем уровень 0,2 погрешности и оценим текущее значение времени по оперативности (см. табл. 3).

Эффективность по оперативности рассчитаем из отношения интервалов регулирования стандартного 1 t2 и адаптивного 2 t1 критериев, что позволяет сравнить, во сколько один критерий эффективнее другого:
Как видно из фиг. 2, адаптивный 2 критерий эффективнее стандартного 1 в 5 раз, т.е. практически на порядок выше.
Неинвазивный способ определения концентрации глюкозы в крови
Гидродинамический смеситель
Устройство для исследования прочностных свойств корнеклубнеплодов
Способ получения дисперсий углеродных наноматериалов
Гидродинамический смеситель
Гидродинамический смеситель
Устройство для исследования прочностных свойств сочных кормов
Способ определения составляющих импеданса биообъекта
Ригель для производства сборно-монолитного каркаса здания
Усреднитель партий сыпучих материалов
Гидродинамический смеситель
Гидродинамический смеситель
Устройство для исследования прочностных свойств сочных кормов
Способ определения составляющих импеданса биообъекта
Ригель для производства сборно-монолитного каркаса здания
Усреднитель партий сыпучих материалов
Сушилка для пастообразных материалов на полидисперсном инертном носителе
Способ получения композиционного сорбционно-активного материала
Способ определения динамики изменения скорости оседания эритроцитов
Способ определения ударного объема сердца

