Результат интеллектуальной деятельности: ГИРОКОМПАС
Вид РИД
Изобретение
Изобретение относится к области приборостроения и используется при определении азимутов.
Известен гирокомпас, описанный в патенте US 2902772 [1], в котором использован чувствительный элемент - поплавковый интегрирующий гироскоп и карданов подвес чувствительного элемента. Гироскоп установлен на платформе, которая лежит в плоскости внутренней рамы карданова подвеса и имеет возможность разворота для установки оси чувствительности гироскопа в плоскости меридиана, а азимут определяют по сигналам датчика угла, установленного на оси карданова подвеса, с помощью которого определяют угловое положение платформы относительно внутренней рамы подвеса, определяя тем самым азимут.
Недостатком этого гирокомпаса является сложность конструкции и низкая точность измерений.
Наиболее близким устройством по сущности и достигаемому эффекту является гирокомпас, описанный в патенте RU 2339910 [2], в котором в качестве чувствительных элементов гирокомпаса выбраны: датчик угловой скорости (ДУС) для измерения азимутальной ошибки, возникающей в результате неточной выставки оси вращения ротора (вектора кинетического момента ротора) ДУС на север, и два наклономера для контроля положения оси чувствительности ДУС относительно горизонтальной плоскости. Указанные чувствительные элементы расположены в термостате, который установлен в двухосном кардановом подвесе. Датчик угла установлен на внутренней оси подвеса с возможностью измерения углового положения термостата относительно рамы подвеса. ДУС установлен в термостате таким образом, что указанный датчик угла позволяет определять угол между наружной осью подвеса и осью вращения ротора гиромотора ДУС (главной осью ДУС) и может измерять углы между измерительными положениями ДУС в азимуте. Для повышения точности гирокомпас производит измерения в нескольких положениях и компенсирует уходы гироскопа. Оптический отражатель (ОО) предназначен для обеспечения возможности передачи измеренного прибором азимута на объекты, азимут которых требуется определить. Он представляет собой набор призм с взаимно перпендикулярными гранями. ОО закрепляется на свободном торце наружной оси так, чтобы ребра призм были перпендикулярны внутренней оси карданова подвеса.
Данный гирокомпас состоит из блока чувствительных элементов (БЧЭ), установленного на поворотном столе, блока электронных приборов, персонального компьютера и пульта управления (ПУ), при этом БЧЭ, компьютер и ПУ связаны с блоком электронных приборов посредством соединительных электрических кабелей.
Основным недостатком конструкции является то, что измерения включают все погрешности изготовления оптического отражателя, погрешности теодолита, а также погрешности снятия отчетов оператора, т.е. недостаточная точность измерений.
Задачей изобретения является повышение точности измерений, расширение функциональных возможностей (вектор азимута на контрольный элемент внешнего отражателя передается напрямую без дополнительных приборов).
Технический результат достигается тем, что в гирокомпасе содержатся БЧЭ, блок электронных приборов, персональный компьютер (ПК) и ПУ, которые связаны между собой посредством электрических кабелей. При этом ПУ используется для подачи питания на гирокомпас и может отсутствовать в схеме, если питание подается напрямую с блоком питания (БП).
Согласно изобретению на торце наружной оси карданова подвеса БЧЭ установлен автоколлиматор либо установлены автоколлиматор и оптический отражатель таким образом, что оптические оси автоколлиматора и оптического отражателя совпадают с наружной осью карданова подвеса; в блок электронных приборов введен блок автоколлиматора, выполненный с возможностью приема сигнала с автоколлиматора и передачи цифрового сигнала в компьютер.
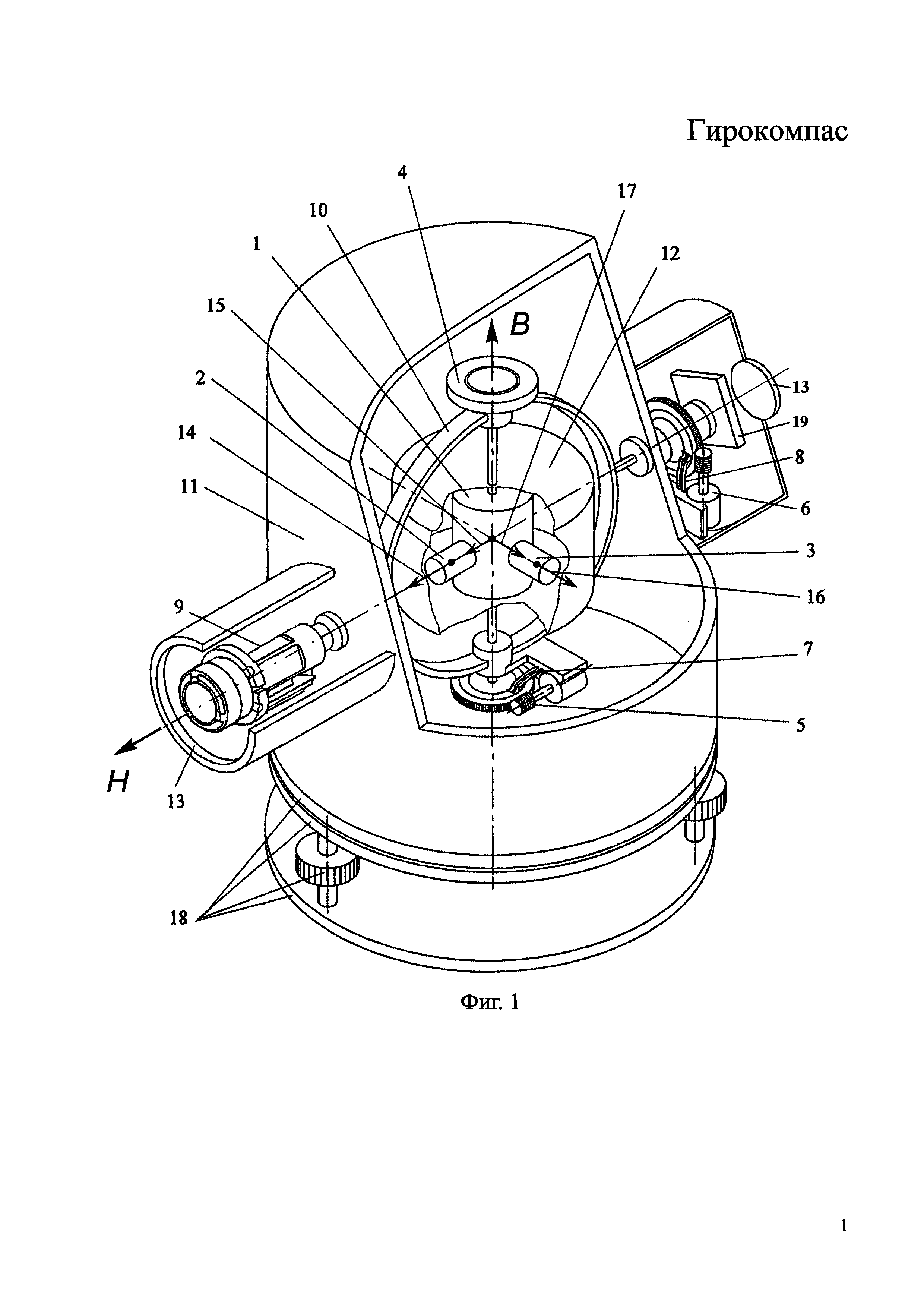
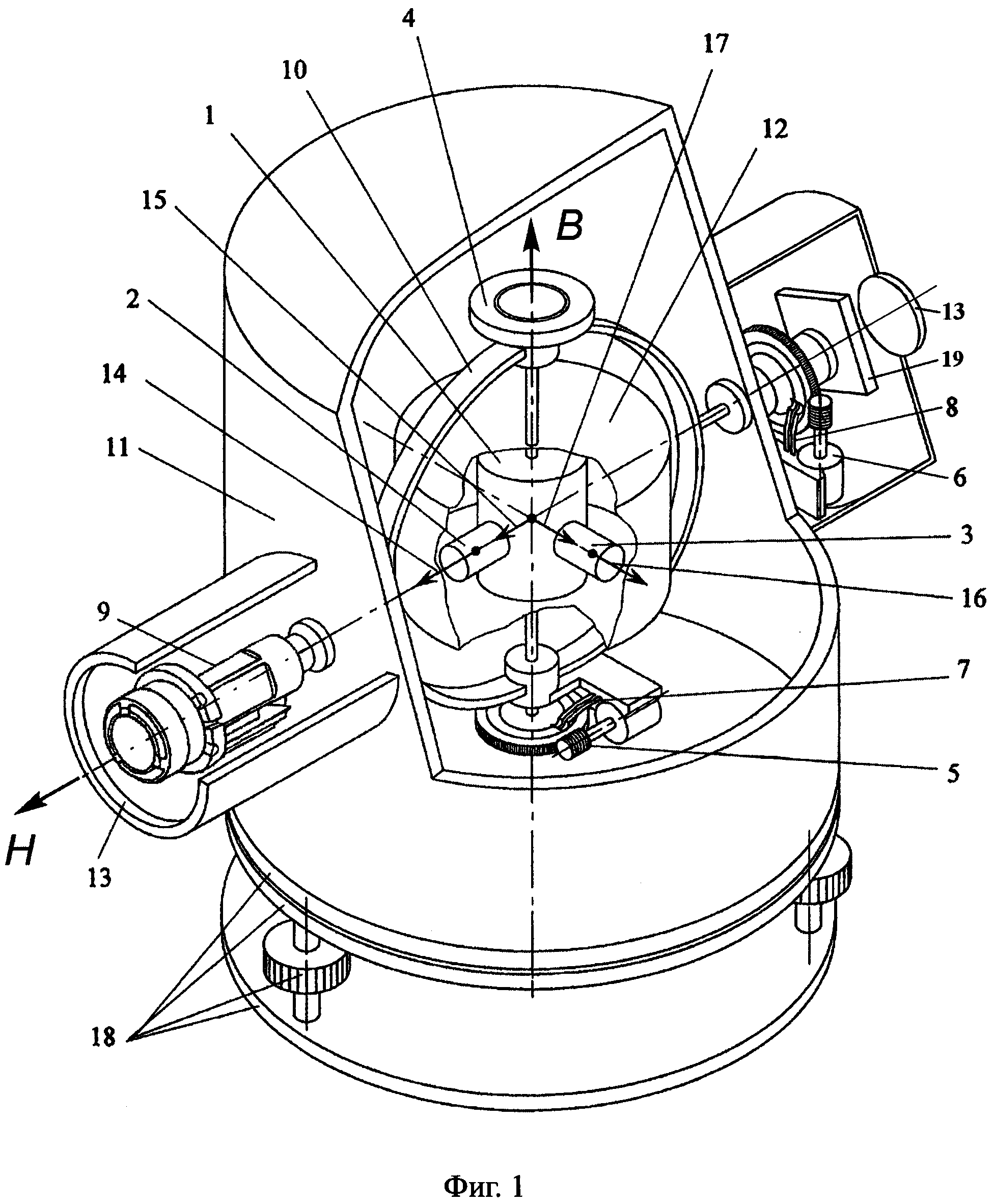
На фиг. 1 представлен блок чувствительных элементов на поворотном столе.
БЧЭ содержит: датчик угловой скорости (1) и два наклономера H1 (2) и Н2 (3), датчик угла (4), приводы П1 (5) и П2 (6) соответственно внутренней и наружной осей подвеса, контактные механизмы КМ1 (7) и КМ2 (8) соответственно внутренней и наружной осей подвеса, автоколлиматор (9), двухосный карданов подвес (10), жесткий несущий корпус (11), термостат (12), иллюминатор (13), а также на фиг. 1 показаны: ось чувствительности H1 (14), главная ось ДУС (15), ось чувствительности Н2 (16), ось чувствительности ДУС (17), поворотный стол (18), оптический отражатель (19).
Заявленное устройство для определения азимута содержит инерциальные чувствительные элементы, установленные в термостате, который помещают в кардановом подвесе с датчиком угла на его внутренней оси, с возможностью проведения измерений сигналов чувствительных элементов и датчика угла в определенном количестве измерительных положений относительно плоскости меридиана и горизонтальной плоскости. Особенность заявленного устройства заключается в том, что ДУС и два наклономера H1 и Н2 помещены в термостат, жестко связаны друг с другом и с ротором датчика угла внутренней оси карданова подвеса, образованного рамой, внутренней и наружной осями, посредством которого закреплены в жестком корпусе установленного на поворотном столе БЧЭ гирокомпаса. При этом оси чувствительности (измерительные оси) наклономеров перпендикулярны выходной оси ДУС, так что ось чувствительности H1 направлена параллельно главной оси ДУС, а ось чувствительности Н2 параллельна оси чувствительности (измерительной оси) ДУС.
ДУС представляет собой двухстепенный гироскоп с поплавковым подвесом.
Карданов подвес (КП) образован рамой, цапфами рамы и цапфами термостата, которые образуют соответственно взаимно перпендикулярные наружную (ось Н) и внутреннюю (ось В) оси. Направления этих осей определены соответствующими векторами Н и В. В опорных подшипниковых узлах жесткого несущего корпуса установлены цапфы рамы КП (установлена наружная ось КП), при этом указанные опорные узлы жестко связывают направление Н наружной оси КП с несущим корпусом.
В КП установлены: термостат с ДУС и наклономерами так, что выходная ось ДУС и внутренняя ось КП расположены параллельно, контактный механизм КМ1, определяющий положение совпадения направлений кинетического момента h ротора гиромотора ДУС и наружной оси КП Н, привод внутренней оси П1, с возможностью обеспечения поворота термостата с ДУС и наклономерами вокруг внутренней оси и удержания термостата с ДУС и наклономерами относительно рамы КП, датчик угла (ДУ), с возможностью измерения углов поворота ДУС относительно рамы (углов Ф между векторами направлений Н и h); контактный механизм КМ2, с возможностью определения вертикальных положений внутренней оси КП (при расположении наружной оси КП в плоскости горизонта); привод наружной оси П2, с возможностью обеспечения поворота наружной оси КП относительно своей продольной оси. На торце наружной оси установлен автоколлиматор либо на противоположных торцах наружной оси установлены автоколлиматор и оптический отражатель. Направления В и Н задаются следующим образом (фиг. 1): для В (в частности) - П1→датчик угла; для Н - П2→автоколлиматор (или оптический отражатель).
Автоколлиматор (АК) (9) и оптический отражатель (19) устанавливают на противоположных торцах наружной оси карданова подвеса таким образом, что их оптические оси совпадают с наружной осью карданова подвеса. Возможно исполнение гирокомпаса только с АК.
Поворотный стол (18) состоит из нижнего опорного кольца, трех подъемных винтов, основания с зажимами крепления корпуса. Основание имеет неподвижную и поворотную части и привод поворотной части. В отверстия нижнего кольца вставлены винты крепления стола к поверхности, на которую устанавливается стол. С помощью трех подъемных винтов, соединяющих нижнее кольцо и неподвижную часть основания, горизонтируется верхняя поверхность поворотной части основания, на которую устанавливается БЧЭ и, т.о., горизонтируется наружная ось КП.
ОО (19) предназначен для обеспечения возможности передачи измеренного прибором азимута на объекты, азимут которых требуется определить.
На фиг. 2 представлены блок электронных приборов (БЭП) (20) и его связи с блоком чувствительных элементов (21), автоколлиматором (9), компьютером (ПК) (22), пультом управления (23) и блоком питания (24).
Пульт управления (23) представляет собой устройство для включения системы термостатирования и питания БЭП без использования ПК. ПУ является необязательным элементом и может отсутствовать в схеме, где управление осуществляется полностью через ПК.
Блок электронных приборов (20) представляет из себя набор электронных блоков в герметичном корпусе с термостатированием. БЭП содержит электронные приборы, обеспечивающие функционирование чувствительных элементов, находящихся в БЧЭ. Также БЭП содержит электронное устройство для обмена информацией между ПК и чувствительными элементами и исполнительными органами в БЧЭ.
В БЭП введен блок автоколлиматора (БАК) (25), выполненный с возможностью приема сигнала с АК и преобразования его в цифровой сигнал для передачи в компьютер.
Блок чувствительных элементов (21) представляет из себя электромеханическое устройство в виде карданова подвеса, в котором установлен термостат с чувствительными элементами ДУС и наклономерами. На внутренней оси подвеса установлен датчик угла. БЧЭ предназначен для изменения ориентации чувствительного элемента относительно корпуса прибора и их фиксации в измерительных положениях.
Персональный компьютер (22) предназначен для управления работой прибора путем подачи команд и управления приводами на осях карданова подвеса, опроса и накопления информации с чувствительного элемента с последующей ее обработкой и вычислением выходной величины в виде азимута наружной оси КП и нормали внешнего отражателя.
Автоколлиматор (9) позволяет измерить угол между собственной оптической осью и нормалью от внешнего отражателя, от которого он получает отраженный сигнал.
Заявляемое устройство, представленное на фиг. 2, работает следующим образом.
Запитывается БЭП (20) от блока питания (24). По командам с пульта (23) обеспечивается подача внешнего питания на БЧЭ (21) и БЭП, далее БЭП начинает работать в режиме ожидания команд от компьютера по интерфейсу и приему цифровой информации.
Затем производится горизонтирование стола, при котором наружная ось КП устанавливается в плоскость горизонта. Наружная ось КП устанавливается в горизонтальное положение по сигналам наклономера H1, информация с которого выведена на экран компьютера. Поворотная часть стола вместе с закрепленным на ней БЧЭ (21) разворачивается в требуемое схемой измерений азимутальное положение, например положение, в котором АК (9) получает возможность визировать внешний отражатель, азимут нормали которого нужно определить.
Компьютер (22) последовательно подает команды на проведение операций выставки в вертикальное положение оси В карданова подвеса по сигналам наклономера Н2 (3) и установки ДУС (1) с помощью КМ 1(7) и датчика угла оси В в измерительное положение (ИП1), при котором вектор кинетического момента h ротора гиромотора ДУС установлен в направлении оси Н, а ось В вертикальна и направлена вверх. По сигналам с БЭП (20) приводы П1 (5) и П2 (6) устанавливают карданов подвес в это положение. При этом установка внутренней оси вертикально вверх контролируется контактным механизмом КМ2 (8) и наклономерами, а установка вектора h в направлении Н контролируется контактным механизмом КМ 1(7) и датчиком угла оси В (4).
Далее производятся измерения сигналов ДУС (1) и датчика угла (4) оси В. Информация о сигнале ДУ (4) поступает в компьютер (22) и запоминается. Затем компьютер (22) подает команды на разворот ДУС (1) из ИП1 на 90° вокруг оси В и производит измерение сигнала ДУС F2, снимает отсчет ДУ оси В. По результатам измерений сигналов в двух положениях компьютер рассчитывает приблизительное значение азимута вектора кинетического момента ДУС в ИП1 по формуле:
Ah=arctgF1/F2,
где Ah - азимут вектора кинетического момента;
F1, F2 - сигналы ДУС.
Квадрант, в котором находится Ah, определяется по знакам F1 и F2. Таким образом, происходит привязка отсчетов датчика угла оси В к азимуту вектора кинетического момента, которая позволяет произвести измерение азимута с высокой точностью не только вектора кинетического момента ДУС, но и направлений наружной оси Н карданова подвеса и АК.
Особенность работы гирокомпаса с автоколлиматором:
Гирокомпас устанавливается перед внешним отражателем, азимут которого необходимо определить таким образом, чтобы визирная ось АК совпадала с нормалью к внешнему отражателю с допуском не более половины зоны захвата АК (9) в азимутальной плоскости и линейным рассогласованием ±2 мм по горизонту и высоте.
Включив гирокомпас, проводят операцию определения азимута наружной оси КП (АT). Результат через интерфейс записывается в ПК (22).
Включаем АК (9), который находится в состоянии «0» разворота вокруг тангажной оси КП. Определяем угол рассогласования (ϕ1) между визирной осью АК и нормалью к внешнему отражателю, азимут которого необходимого определить. С АК (9) на БАК(25), который находится в БЭП (20), подается информация на ПК (22). Измерение углов с помощью АК (9) описано в литературе [3]. Результат записываем в ПК (22).
Разворачиваем АК (9) вокруг оси тангажа на 180° и определяем угол рассогласования (ϕ2) между визирной осью АК и нормалью к внешнему отражателю, азимут которого необходимо определить. Рассчитываем угол между наружной осью КП и нормалью внешнего отражателя ϕH-00=0,5(ϕ1-ϕ2).
Рассчитываем азимут входящей нормали внешнего отражателя по формуле:
А00=АТ+ϕH-00,
где ϕH-00 - угол между наружной осью КП и нормалью внешнего отражателя;
ϕ1,2 _ угол рассогласования между визирной осью АК и нормалью к внешнему отражателю;
AT - азимут наружной оси КП.
В компьютере (22) сравниваются два показания значений углов отклонения положений наружной оси карданова подвеса от азимута и наружной оси карданова подвеса от перпендикуляра к внешнему отражателю, в результате чего вычисляется значение азимута вектора перпендикуляра, на который направлена ось АК.
Заявляемый гирокомпас содержит блок чувствительных элементов, блок электронных приборов, персональный компьютер, связанные между собой посредством соединительных электрических кабелей, отличающийся тем, что на торце наружной оси карданова подвеса блока чувствительных элементов установлен автоколлиматор либо установлены автоколлиматор и оптический отражатель таким образом, что оптические оси автоколлиматора и оптического отражателя совпадают с наружной осью карданова подвеса; в блок электронных приборов введен блок автоколлиматора, выполненный с возможностью приема сигнала с автоколлиматора и передачи цифрового сигнала в компьютер.
Техническим результатом от использования предложенного устройства является то, что значительно уменьшается суммарная погрешность измерений. В результате использования нового технического решения эта погрешность составляет менее 1 угл. сек. Также обеспечивается более высокая технологичность, расширение функциональных возможностей (направления вектора азимута на другой внешний отражатель передается напрямую без дополнительных приборов).
Источники информации
1. Патент US №2902772, опубл. 1959 г. (аналог)
2. Патент RU №2339910, опубл.2008 г., МПК G01С 19/38, (прототип).
3. Буюкян С.П. Видиоизмерение и видеоизмерительные системы. Принципиальные схемы и краткое описание. Изд. Московский государственный университет геодезии и картографии. Федеральное агентство по образованию. Москва. 2010 г.
Гирокомпас, содержащий блок чувствительных элементов, блок электронных приборов, персональный компьютер, связанные между собой посредством соединительных электрических кабелей, отличающийся тем, что на торце наружной оси карданова подвеса блока чувствительных элементов установлен автоколлиматор либо установлены автоколлиматор и оптический отражатель таким образом, что оптические оси автоколлиматора и оптического отражателя совпадают с наружной осью карданова подвеса; в блок электронных приборов введен блок автоколлиматора, выполненный с возможностью приема сигнала с автоколлиматора и передачи цифрового сигнала в компьютер.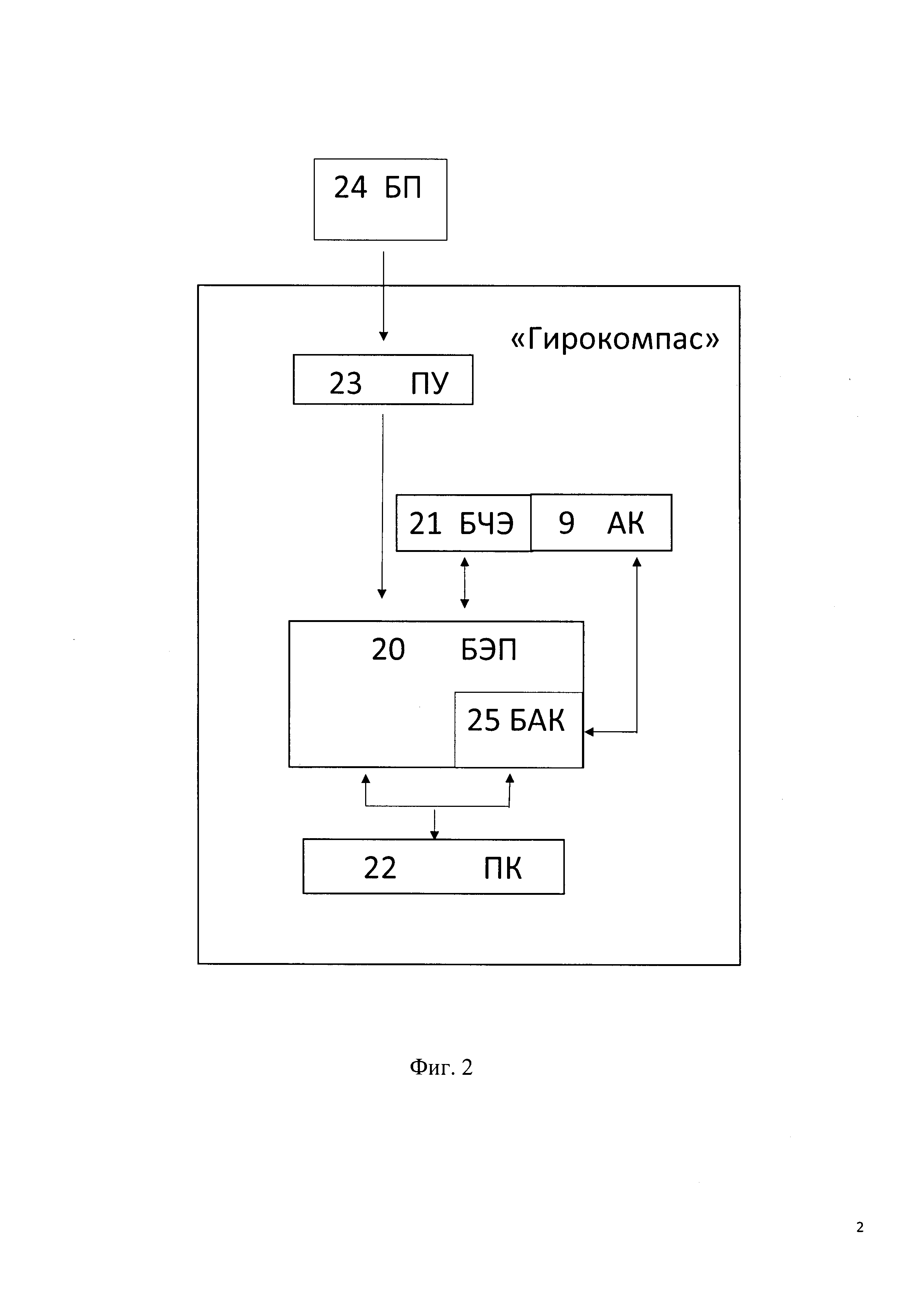
Электромеханический привод
Планетарно-цевочный электропривод
Контактирующее устройство
Способ стабилизации структурно неустойчивого осциллятора жидкости разгонных блоков и верхних ступеней ракет-носителей
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ компенсации потери тяги двигателями ориентации разгонного блока
Перестраиваемое мажоритарное устройство
Устройство для формирования установочного импульса
Способ и устройство асинхронного последовательного интерфейса обмена информацией и его модификации
Устройство формирования приоритетов при обращении к общей памяти нескольких устройств
Устройство преобразования информации
Электромеханический привод
Планетарно-цевочный электропривод
Способ управления программным разворотом разгонного блока
Перестраиваемое мажоритарное устройство

