Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ
Вид РИД
Изобретение
Изобретение относится к области электромеханики и пьезотехники, может быть использовано для привода различных устройств в прецизионном приборостроении, в оптических системах, в системах нанотехнологий.
Известен пьезоэлектрический двигатель [1]. Он состоит из пьезопакета с осевым отверстием, с которым сопряжены опорные элементы со сферическими внешними поверхностями. Один опорный элемент связан с упругим корпусом, а второй опорный элемент с винтом, обеспечивающим зажатие пьезопакета между двумя опорными элементами. Когда на пьезопакет подается управляющее напряжение, он удлиняется по оси и сжимается по диаметру. Уменьшение диаметра отверстия в пьезопакете приводит при этом к выжиманию опорных элементов из отверстия благодаря сферической форме их поверхностей. При изменении знака управляющего напряжения пьезопакет уменьшается в длину и расширяется по диаметру. Увеличение при этом диаметра отверстия приводит к тому, что опорные элементы входят в него под действием упругого корпуса. Недостатки устройства: отсутствует компенсация нелинейности перемещения, которая обусловлена гистерезисом; наличие механической компенсации температурной погрешности приводит к износу трущихся поверхностей между опорными элементами со сферическими внешними поверхностями и пьезопакетом, из-за чего снижается точность позиционирования, уменьшается нагрузочное усилие и уменьшается срок службы.
Наиболее близким по технической сущности к предлагаемому решению является устройство для управления пьезоэлектрическим двигателем [2] (прототип), содержащее пьезоэлектрический двигатель и датчик обратной связи. Выходной сигнал с датчика обратной связи, пропорциональный текущему значению измеряемого параметра (скорости), поступает на один из входов элемента сравнения, другой вход которого подключен к выходу блока задания параметра движения (скорости вращения). Выходной сигнал элемента сравнения - сигнал ошибки ε(t) - через блок регулирования управляемого параметра поступает на управляющий вход управляемого фазовращателя. Сигнал со свободных электродов пьезорезонатора пьезоэлектрического двигателя через переключатель поступает на вход избирательного усилителя. Выход избирательного усилителя подключен к сигнальному входу управляемого фазовращателя, выход которого соединен со входом усилителя. Выходной сигнал с этого усилителя через переключатель поступает на рабочие электроды пьезорезонатора пьезодвигателя.
Принцип его работы основан на управлении параметра движения пьезоэлектрического двигателя путем регулирования угла сдвига фаз напряжения на свободных электродах в функции сигнала рассогласования по управляемому параметру (скорости) с помощью управляемого фазовращателя. Управляемый фазовращатель и избирательный усилитель позволяют реализовать отслеживание управляемого параметра (рабочей частоты в районе резонансного значения) путем организации автогенераторного процесса, используя напряжение на свободных электродах в качестве сигнала обратной связи и осуществляя сдвиг фазы этого напряжения на величину, необходимую для выполнения условий самовозбуждения на заданной частоте. Это обеспечивает работоспособность предлагаемого устройства в условиях реверса и при изменениях момента нагрузки в рабочем диапазоне.
Недостатком прототипа является наличие компонентов, усложняющих конструкцию устройства. К ним относятся: датчик частоты вращения - датчик обратной связи, закрепленный на пьезодвигателе, управляемый фазовращатель, избирательный усилитель, требующие прецизионной настройки. Необходим контроль дополнительных параметров (максимального угла фаз и полосы пропускания), при этом полоса пропускания должна быть шире области частот, внутри которой группируются резонансные частоты пьезодвигателя и одновременно достаточно узкой, чтобы надежно подавлять сигналы паразитных частот.
Таким образом, прототипу свойственно избыточное усложнение конструкции, которое приводит к увеличению габаритных размеров, трудоемкости изготовления и уменьшению его надежности.
Задачей предлагаемого изобретения является создание устройства управления самочувствительным линейным пьезоэлектрическим актюатором (пьезоактюатором), которое имеет относительно простую конструкцию, уменьшенные габаритные размеры, высокую точность позиционирования, слабозависящую от нестабильности источника питания, повышенную надежность и технологичность изготовления.
Техническим результатом изобретения является упрощение конструкции устройства управления линейным пьезоэлектрическим актюатором, повышение надежности, уменьшение габаритных размеров, обеспечение высокой точности управления перемещением, расширение функциональных возможностей пьезоэлектрического актюатора, уменьшение влияния нестабильности источника питания.
Это достигается тем, что в устройстве управления самочувствительным линейным пьезоэлектрическим актюатором (самочувствительным пьезоактюатором), содержащем пьезоактюатор в виде пьезоэлемента с электродами, установленными на его одних противоположных гранях, усилитель напряжения, блок задания частоты, соединенный с первым входом элемента сравнения, выход которого подключен к входу блока регулирования управляющего напряжения, в соответствии с предлагаемым изобретением введена мостовая измерительная цепь из двух (первого и второго) резисторов, образующих два противоположных ее плеча, четырех (первого - четвертого) конденсаторов, два из которых (второй и третий) образуют два других противоположных плеча, а первый и четвертый конденсаторы подключены параллельно первому и второму резисторам соответственно, также введены интегратор, компаратор, усилитель тока и оптопара, при этом электроды (обкладки) первого и четвертого конденсаторов имеют гребенчатую форму и сформированы на других противоположных гранях пьезоэлемента, параллельных направлению перемещения, первый вывод измерительной диагонали мостовой измерительной цепи соединен с первым входом (входным выводом) интегратора, а второй вывод измерительной диагонали мостовой измерительной цепи соединен со вторым входом (входным выводом) интегратора и вторым входом (входным выводом) компаратора, выход интегратора подключен к первому входу (входному выводу) компаратора, при этом его выход соединен со входом усилителя тока, с третьим входом (входным выводом) интегратора и первым выводом питающей диагонали мостовой измерительной цепи, второй вывод которой соединен с общей шиной питания, выход усилителя тока подключен к входу оптопары, а ее выход соединен со вторым входом (входным выводом) элемента сравнения и с первым входом (входным выводом) блока задания частоты, имеющего второй вход (входной вывод) для подачи сигнала управления, при этом выход блока задания частоты соединен со вторым входом (входным выводом) блока регулирования управляющего напряжения, выход последнего через блок формирования управляющего напряжения соединен со входом усилителя напряжения, выходные выводы которого подключены к выводам (обкладкам) пьезоэлемента.
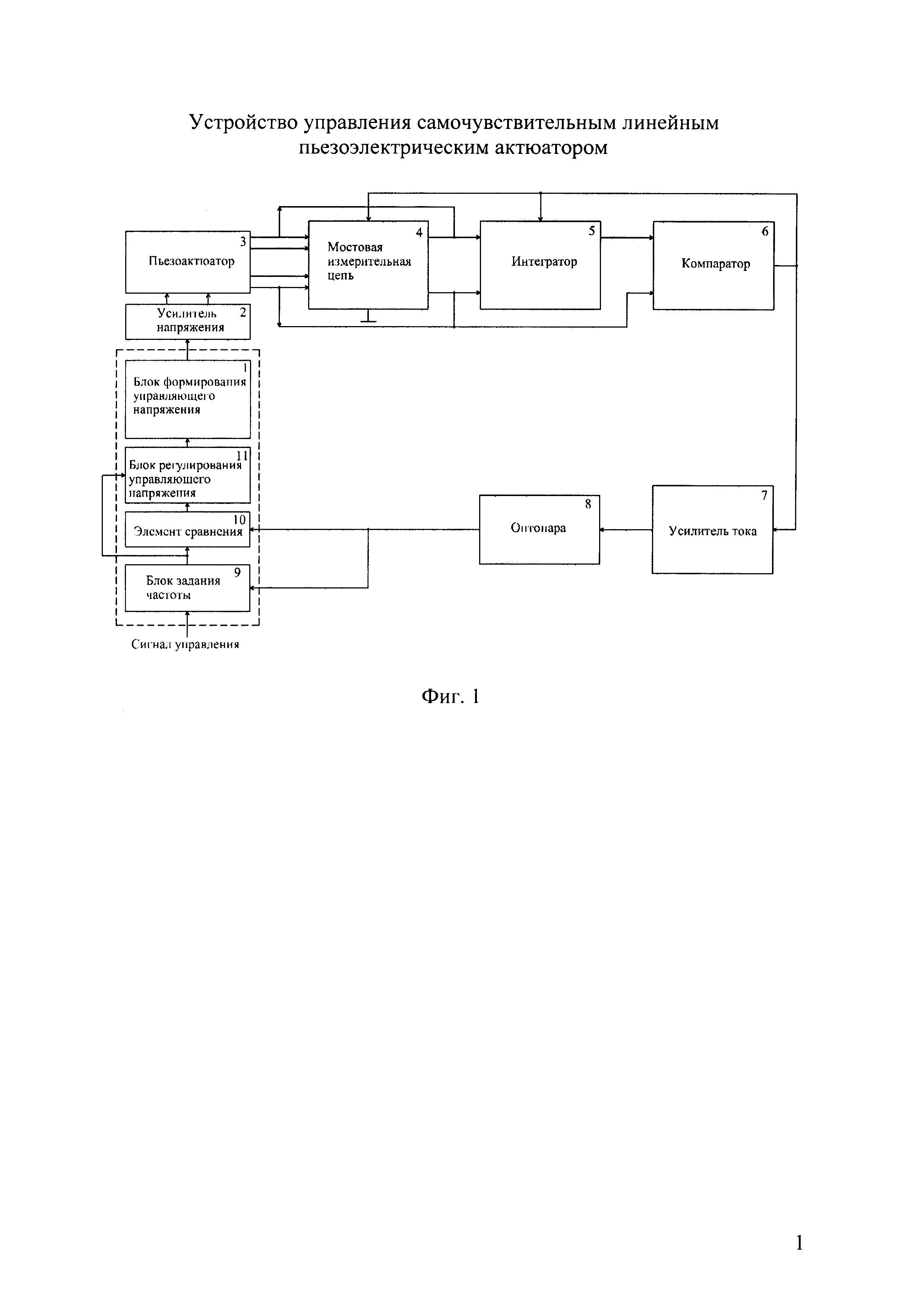
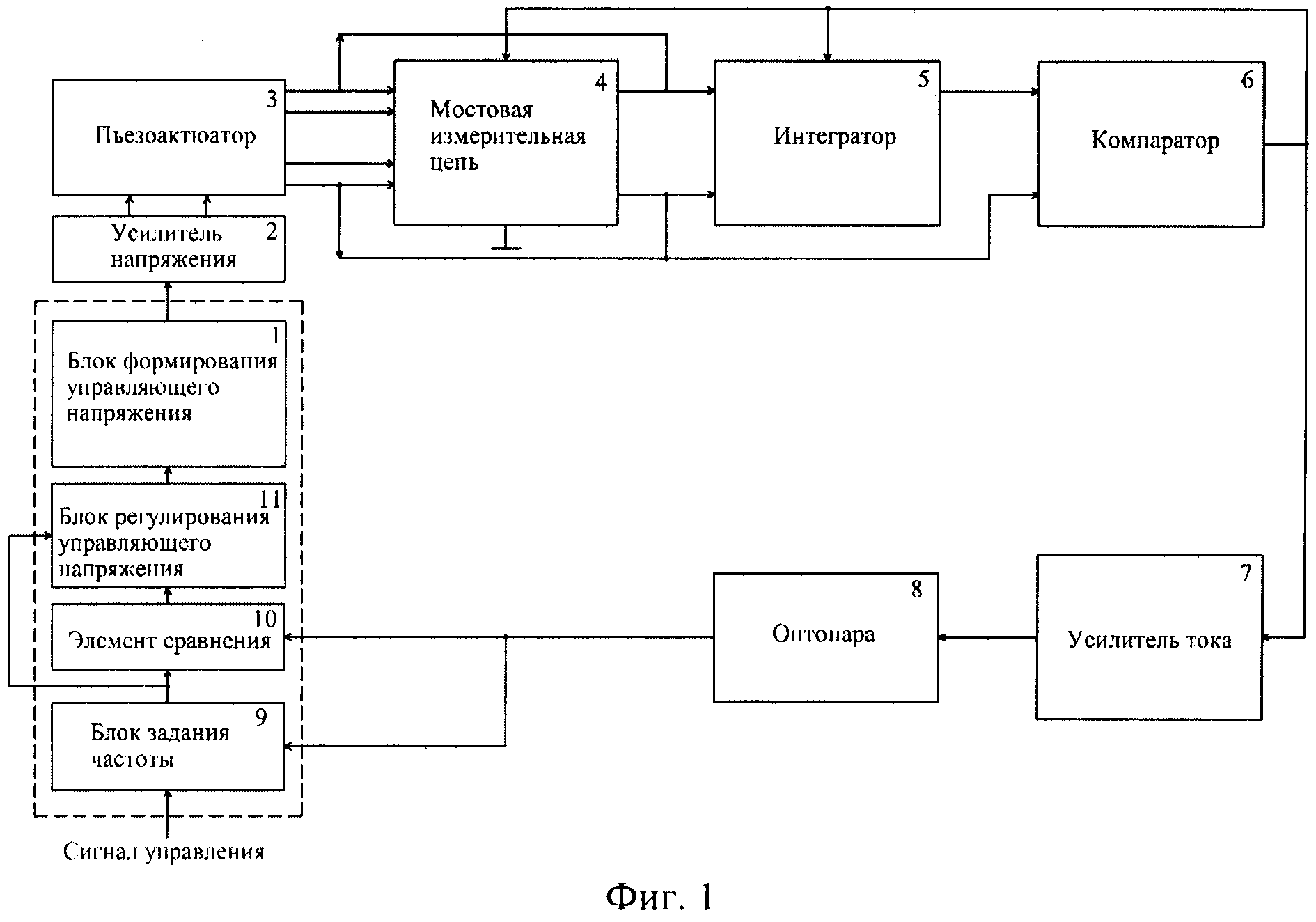
На фиг. 1 показана блок-схема устройства. Устройство содержит блок формирования управляющего напряжения 1, усилитель напряжения 2, самочувствительный линейный пьезоэлектрический актюатор - пьезоактюатор 3, мостовую измерительную цепь 4, интегратор 5, компаратор 6, усилитель тока 7, оптопару 8, блок задания частоты 9, элемент сравнения 10 и блок регулирования управляющего напряжения 11.
Первый выходной вывод мостовой измерительной цепи 4 соединен с первым входным выводом интегратора 5, а второй ее выход соединен со вторым входным выводом интегратора 5 и вторым входным выводом компаратора 6. Выход интегратора 5 подключен к первому входному выводу компаратора 6, а выход компаратора соединен с первым выводом питающей диагонали мостовой измерительной цепи 4, второй входной вывод которой соединен с общей шиной питания. Кроме того, выход компаратора 6 соединен с третьим входным выводом интегратора 5 и со входом усилителя тока 7, выход которого подключен к входу оптопары 8, а ее выход соединен с первым входным выводом блока задания частоты 9 и со вторым входным выводом элемента сравнения 10, выход которого подключен к первому входному выводу блока регулирования управляющего напряжения 11. Выход последнего соединен со входом усилителя напряжения 2 (усилителя постоянного напряжения) через блок регулирования управляющего напряжения 11. Выходные выводы усилителя напряжения 2 подключены к рабочим выводам (электродам) пьезоактюатора 3. Выводы первого измерительного конденсатора 14 (C1) (фиг. 2) на поверхности пьезоэлемента (пьезоактюатора) подключены к выводам первого резистора 12 (R1) мостовой измерительной цепи 4, а выводы второго измерительного конденсатора 17 (С4) на противоположной поверхности пьезоэлемента (пьезоактюатора) подключены к выводам второго резистора 13 (R2) мостовой измерительной цепи 4. На второй вход блока задания частоты 9 (фиг. 1, фиг. 2) подается внешний сигнал управления, а его выход соединен с первым входным выводом элемента сравнения 10 и со вторым входным выводом блока регулирования управляющего напряжения 11.
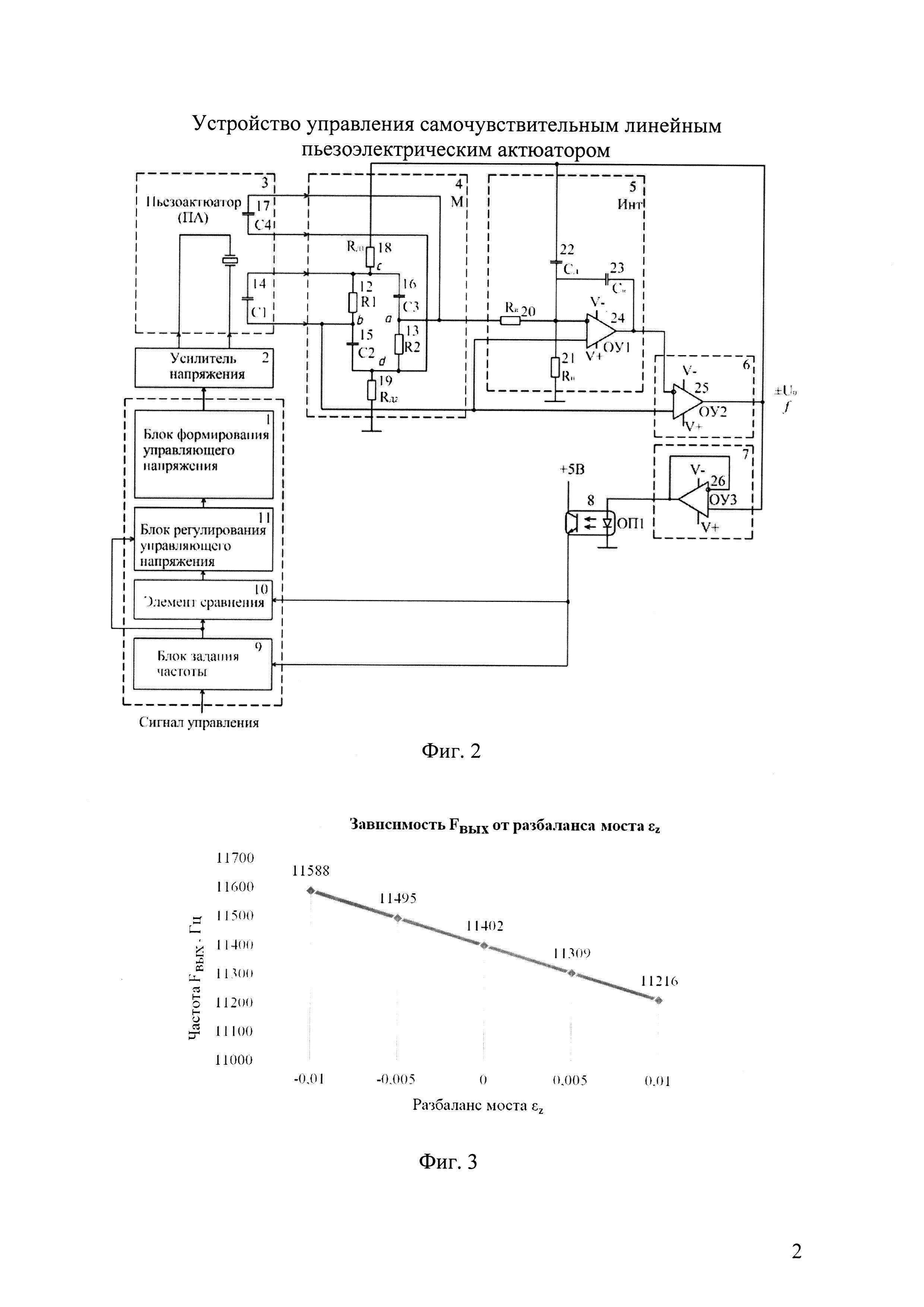
На фиг. 2 показана функциональная электрическая схема устройства. На ней вместе с функциональными блоками 1, 2, 9, 10, 11 (см. фиг. 1) подробно показаны электрические схемы блоков 4, 5, 6, 7, 8 и структурная схема пьезоактюатора 3.
Пьезоактюатор 3 имеет два рабочих электрода (обкладки) и по два измерительных электрода в форме гребенки, сформированных на смежных поверхностях пьезоактюатора, параллельных направлению перемещения, и образующих два конденсатора 14 (C1) и 17 (С4), емкость которых изменяется при деформации пьезоактюатора. Рабочие электроды (обкладки) пьезоактюатора 3 подключены к выходу усилителя напряжения 2, а измерительные электроды подключены к мостовой измерительной цепи 4. Мостовая измерительная цепь 4 состоит из двух резисторов 12 (R1) и 13 (R2), образующих два противоположных ее плеча, четырех конденсаторов 14 (С1), 15 (С2), 16 (С3) и 17 (С4), два из которых 15 (С2), 16 (С3) образуют два других противоположных плеча, а два других 14 (С1) и 17 (С4) подключены параллельно резисторам 12 (R1) и 13 (R2). К одной вершине мостовой измерительной цепи 4 (между резистором 12 (R1) и конденсатором 16 (С3)) подключен дополнительный резистор 18 (Rд1), а к противоположной вершине - дополнительный резистор 19 (Rд2).
Интегратор 5 состоит из резистора интегратора 20 (Rи), второго резистора интегратора 21 (R0), дозирующего конденсатора 22 (Сд), конденсатора интегратора 23 (Си), операционного усилителя 24 (ОУ1). Компаратор 6 выполнен на операционном усилителе 25 (ОУ2).
Усилитель тока 7 выполнен на операционном усилителе 26 (ОУЗ), включенном по схеме повторителя напряжения. Входная цепь оптопары 8 (светодиод) подключена к выходу операционного усилителя 26 и к общей шине питания, а выходная цепь (фототранзистор) - к плюсу питания (+5 В), первому входному выводу элемента сравнения 10 и к второму входному выводу блока задания частоты 9. Блок задания частоты 9, элемент сравнения 10, блок регулирования управляющего напряжения 11 и блок формирования управляющего напряжения 1 могут быть выполнены в виде микроконтроллера.
Устройство управления самочувствительным линейным пьезоэлектрическим актюатором работает следующим образом (см. фиг. 1). Пьезоактюатор 3 выполняет две функции: исполнительного механизма и датчика обратной связи (датчика деформации), то есть является самочувствительным. Сигнал управления пьезоактюатором 3 поступает на него от блока задания частоты 9 через элемент сравнения 10, блок регулирования управляющего напряжения 11, блок формирования управляющего напряжения 1, усилитель напряжения 2. При пошаговом изменении постоянного электрического напряжения на обкладках пьезоактюатора 3 (пьезоэлемента) происходит его удлинение или сжатие (изменение линейных размеров) соответственно, осуществляется в ту или другую сторону перемещение подсоединенной к нему механической нагрузки. С изменением линейных размеров пьезоактюатора 3 пропорционально изменяется электрическая емкость между электродами измерительных конденсаторов 14 (C1) и 17 (С4), которые имеют форму гребенки и сформированы на соседних поверхностях с рабочими электродами. Изменение емкостей измерительных конденсаторов 14 (C1) и 17 (С4) пьезоактюатора 3 приводит к разбалансу мостовой измерительной цепи 4, в которую они включены. Включение в мостовую измерительную цепь двух конденсаторов компенсирует погрешности внешних воздействующих факторов и повышает точность измерения емкости.
Питание мостовой измерительной цепи осуществляется двухполярным напряжением питания типа «меандр» с выхода компаратора 6.
Для задания начальной частоты при нулевом разбалансе моста из резисторов 12, 13, конденсаторов 14, 15, 16 и пьезоактюатора 3 (фиг. 2) в диагональ питания моста включены дополнительные резисторы 18 (Rд1) и 19 (Rд2), а к инвертирующему входу операционного усилителя 24 (ОУ1) интегратора подключен резистор 21 (R0).
Разбаланс мостовой измерительной цепи 4 с включенными в нее измерительными конденсаторами 14 (C1) и 17 (С4) пьезоактюатора 3 вызывает изменение частоты сигнала на выходе компаратора 6, который далее поступает на усилитель тока 7 и затем на оптопару 8 (служит для гальванической развязки). С выхода оптопары 8 частотный сигнал поступает на блок задания частоты 9 и элемент сравнения 10, который сравнивает этот сигнал с частотой сигнала, поступающего с блока задания частоты 9.
Блок задания частоты 9 имеет два входа. На первый вход подается внешний сигнал управления (аналоговый или кодовый). На второй вход поступает частотный сигнал с выхода оптопары 8, который используется для установки начальной частоты выходного частотного сигнала блока задания частоты 9. Такая установка производится при включении питания, а также может быть осуществлена при каждом возврате пьезоактюатора в исходное состояние (нулевую точку или точку начала отсчета). То есть по сигналу с выхода оптопары 8 производится коррекция управляющего сигнала на выходе блока задания частоты 9 (подстройка частоты начального управляющего сигнала с выхода блока задания частоты 9 под начальную частоту сигнала с выхода интегратора 5).
При последующем изменении управляющего сигнала на блоке задания частоты 9 сигнал с выхода оптопары 8 не используется. Элемент сравнения 10 выделяет разностный сигнал между управляющим сигналом от блока задания частоты 9 и сигналом обратной связи, поступающей от оптопары 8.
Далее разностный сигнал с элемента сравнения 10 подается на блок регулирования управляющего напряжения 11, на этот же блок подается сигнал с блока задания частоты 9. В блоке регулирования управляющего напряжения 11 корректируется сигнал управления на величину, пропорциональную сигналу от элемента сравнения 10. Далее, с блока регулирования управляющего напряжения 11 скорректированный сигнал поступает на блок формирования управляющего напряжения 1, который формирует аналоговый сигнал, поступающий на пьезоактюатор 3 через усилитель напряжения 2.
Таким образом, в предлагаемом устройстве управления самочувствительным линейным пьезоэлектрическим актюатором нелинейность зависимости его перемещения от управляющего напряжения, возникающая из-за гистерезиса, ползучести и последействия, устраняется путем коррекции частотного сигнала, поступающего на блок регулирования управляющего напряжения 11, на величину фактического отклонения частоты сигнала с выхода интегратора 5 от частоты сигнала управления с блока задания частоты 9.
Работоспособность предлагаемого устройства подтверждена проведенными теоретическими и экспериментальными исследованиями.
В качестве пьезоактюатора, для примера, был взят монолитный пьезоэлемент 6×50×4 мм из НЦТС-1 (фиг. 7), с интегрированными на двух его боковых поверхностях свободных от рабочих электродов (4×25 мм) толстопленочными конденсаторами с электрической емкостью 971,7 пкФ. Электроды образуют гребенчатую структуру с длиной проводников 3 мм, высотой 0,015 мм, шириной 0,2 мм и расстоянием между ними 0,2 мм (фиг. 7) и выполнены в соответствующих углублениях на поверхности пьезоэлемента.
Была получена функция преобразования относительного изменения частоты на выходе компаратора 6 от относительного изменения двух измерительных емкостей на поверхности пьезоактюатора (пьезоэлемента) 3 (см. фиг. 2) исходя из следующих соображений.
При подаче к обкладкам пьезоактюатора управляющего напряжения он деформируется (сжимается-расширяется). В результате расстояние между обкладками изменяется, соответственно изменяется его емкость:

где ε0 - диэлектрическая постоянная в вакууме; εr - относительная диэлектрическая постоянная диэлектрика, А - площадь области между поверхностями и h - расстояние между поверхностями.
С помощью мостовой измерительной цепи 4 изменение емкости пьезоактюатора преобразуется в напряжение, подаваемое на вход интегратора 5. На выходе компаратора 6 генерируется сигнал прямоугольной формы типа «меандр» с частотой, пропорциональной перемещению пьезоактюатора 3. Питание устройства осуществляется от двухполярного источника постоянного электрического напряжения, не требующего особой стабилизации, так как электрическое питание мостовой измерительной цепи 4 осуществляется напряжением с выхода компаратора 6, амплитуда которого не влияет на частоту выходного сигнала устройства.
В установившемся режиме работы устройства с выхода компаратора 6 следуют разнополярные импульсы амплитудой ±U0. Пусть в момент времени t0 произошла смена полярности выходного напряжения с -U0 на +U0. При этом напряжение на выходе интегратора 5 обусловлено положительным «скачком» напряжения с одной из вершин измерительной диагонали мостовой измерительной цепи 4, равным

где εz=ΔZ/Z - относительное изменение комплексного сопротивления Z мостовой измерительной цепи 4 при деформации пьезоэлементов пьезоактюатора, m=Rд1/Z и n=Rд2/Z - коэффициенты, равные отношению сопротивлений Rд1 и Rд2 к комплексному сопротивлению Z мостовой измерительной цепи;
и отрицательным "скачком" через конденсатор Сд, равным

Напряжение питания Ucd при введенных дополнительных резисторах Rд1 и Rд2 будет определяться выражением:

где k = 1 + m + n.
С учетом начальных условий имеем:

Под действием напряжения разбаланса мостовой измерительной цепи 4, равного

и напряжения с резистора R0, равного

напряжение на выходе интегратора на интервале от t0 до t1, который равен половине периода (Тк/2=t1-t0) колебаний выходного сигнала частотного преобразователя, будет увеличиваться до положительного порогового уровня компаратора 6, равного

В момент (t1) равенства порога срабатывания и напряжения на выходе интегратора 5 вновь произойдет смена полярности выходного напряжения. При этом напряжение на выходе интегратора будет равно

где Rи и R0 - соответственно сопротивления первого и второго резисторов интегратора 5, Си - емкость конденсатора в цепи отрицательной обратной связи интегратора, Тк - период колебаний выходного сигнала.
Для момента равенства напряжений на выходе интегратора и порогового уровня компаратора справедливо выражение:

Решая выражение (10) относительно периода следования импульсов выходного сигнала Тк, получим выражение для частоты сигнала на выходе компаратора 6:

Из выражения (11) видно, что при нулевом разбалансе мостовой измерительной цепи 4 (εZ=0) и равенстве сопротивлений дополнительных резисторов Rд1 и Rд2 (n=m) начальная частота  выходного сигнала преобразователя может задаваться с помощью величин емкости Сд и сопротивления R0 второго резистора интегратора и равна
выходного сигнала преобразователя может задаваться с помощью величин емкости Сд и сопротивления R0 второго резистора интегратора и равна

При разбалансе мостовой измерительной цепи 4 в ту или другую сторону величина относительного изменения комплексного сопротивления ее плеч будет изменяться в зависимости от относительной деформации пьезоактюатора в диапазоне от -0,01 до +0,01 (εz=0÷ ±0,01), и учитывая то, что эта величина значительно меньше единицы, можно определить девиацию частоты  сигнала на выходе компаратора 6, соответственно на выходе оптопары 8:
сигнала на выходе компаратора 6, соответственно на выходе оптопары 8:

которая может задаваться и устанавливаться более точно с помощью величин емкости Сд и сопротивления Rи первого резистора интегратора 5.
Математическое моделирование устройства с учетом реально возможных значений параметров схемы и заданных диапазонов разбаланса мостовой измерительной цепи (моста) позволило получить графическую зависимость выходного сигнала от изменения разбаланса моста. На фиг. 3 показана зависимость частоты выходного сигнала от разбаланса моста εZ согласно выражению (11) в диапазоне от -0,01 до +0,01 (относительных единиц) при следующих параметрах схемы:
- емкость измерительных и постоянных конденсаторов равна 971,7 пкФ,
- сопротивление двух резисторов в противоположных плечах моста R=1 МОм,
- сопротивления интегратора Rи=50 кОм и R0=500 кОм,
- емкость конденсатора Сд=40 пФ,
- емкость конденсатора Си=200 пФ,
- сопротивление дополнительных резисторов Rд1=Rд2=2 кОм.
При подаче напряжения ±300 В удлинение составляет ±2,06 мкм, емкость пьезоактюатора при этом изменяется от 969,8 пкФ до 973,7 пкФ. Первому значению емкости соответствует частота 11216 Гц, а второму - 11588 Гц. Если измерять целые значения частоты, то диапазон измерения в этом случае можно разбить на 372 части, тогда дискрет (шаг) измерения получается 5,5 нм (2,06 мкм: 372).
Из графика на фиг. 3 видно, что частота  выходного сигнала от разбаланса моста изменяется от 11588 Гц при εZ=-0,01 до 11216 Гц при εZ=+0,01 и равна 11402 Гц при εZ=0, носит линейный характер во всем диапазоне разбаланса (как в отрицательной, так и в положительной области), что может быть использовано в актюаторах наноперемещений и работает при двухстороннем разбалансе моста (позволяет измерять сжатие и удлинение).
выходного сигнала от разбаланса моста изменяется от 11588 Гц при εZ=-0,01 до 11216 Гц при εZ=+0,01 и равна 11402 Гц при εZ=0, носит линейный характер во всем диапазоне разбаланса (как в отрицательной, так и в положительной области), что может быть использовано в актюаторах наноперемещений и работает при двухстороннем разбалансе моста (позволяет измерять сжатие и удлинение).
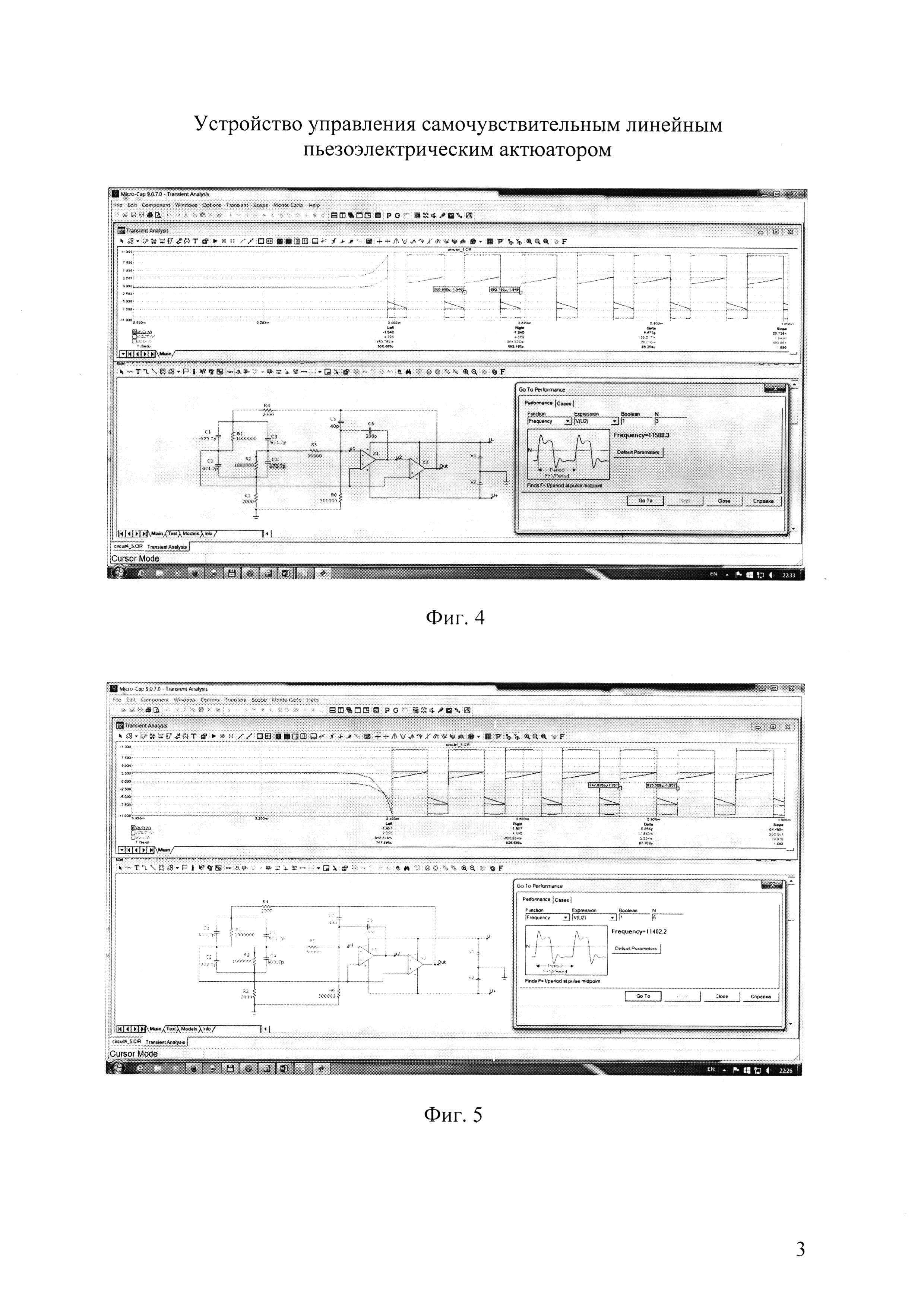
Схема принципиальная электрическая устройства от пьезоактюатора 4 до компаратора 6 (фиг. 2) была смоделирована с помощью компьютерной программы «Micro-Cap». На фиг. 4, фиг. 5 и фиг. 6 приведены окна программы со схемой и диаграммами сигналов на выходе компаратора 6 и интегратора 5, с частотами выходного сигнала, равными 11588 Гц, 11402 Гц и 11588 Гц, при значениях измерительных емкостей пьезоактюатора 973,7 пкФ, 971,7 пкФ, 969,8 пкФ соответственно. Результаты схемотехнического компьютерного моделирования подтвердили справедливость результатов математического моделирования.
На фиг. 7 приведена 3D-модель пьезоактюатора 3 с изображением рабочих электродов (обкладок) 27, электродов (обкладок) 28 первого измерительного конденсатора и электродов (обкладок) 29 второго измерительного конденсатора.
На фиг. 8 приведен фрагмент топологии гребенчатой структуры первого измерительного конденсатора, состоящей из двух электродов (обкладок) 28, выполненных в углублениях на поверхности (30) пьезоэлемента.
Предлагаемое устройство по сравнению с прототипом имеет упрощенную конструкцию, повышенную надежность, уменьшенные габаритные размеры благодаря тому, что не требуется отдельный датчик перемещения, а для контроля перемещения (деформации) пьезоэлектрического актюатора используется сам пьезоэлектрический актюатор (самочувствительный пьезоактюатор). При этом обеспечивается высокая точность позиционирования, повышенная надежность и технологичность изготовления.
Таким образом, благодаря отличительным признакам изобретения упрощается конструкция устройства управления линейным пьезоэлектрическим актюатором, повышается его надежность, уменьшаются габаритные размеры, обеспечивается высокая точность позиционирования.
Предлагаемое устройство выгодно отличается от известных ранее и может найти широкое применение в приводах различных устройств в прецизионном приборостроении, в оптических системах, в системах микро- и нанопозиционирования.
Источники информации
1. Бойков В.И., Быстров С.В., Смирнов А.В., Чежин М.С. Патент RU №2030087. Пьезоэлектрический двигатель. Опубл. 27.02.1995.
2. Ерофеев А.А., Кирсяев А.Н., Кузнецов О.Л., Гринфельд М.Л. Патент RU №2025882. Устройство для управления пьезоэлектрическим двигателем. Опубл. 30.12.1994.
Устройство управления самочувствительным линейным пьезоэлектрическим актюатором (самочувствительным пьезоактюатором), содержащее пьезоактюатор в виде пьезоэлемента с электродами, установленными на его одних противоположных гранях, усилитель напряжения, блок задания частоты, соединенный с первым входом элемента сравнения, выход которого подключен к входу блока регулирования управляющего напряжения, отличающееся тем, что введена мостовая измерительная цепь из двух (первого и второго) резисторов, образующих два противоположных ее плеча, четырех (первого - четвертого) конденсаторов, два из которых (второй и третий) образуют два других противоположных плеча, а первый и четвертый конденсаторы подключены параллельно первому и второму резисторам соответственно, также введены интегратор, компаратор, усилитель тока и оптопара, при этом электроды (обкладки) первого и четвертого конденсаторов имеют гребенчатую форму и сформированы на других противоположных гранях пьезоэлемента, параллельных направлению перемещения, первый вывод измерительной диагонали мостовой измерительной цепи соединен с первым входом (входным выводом) интегратора, а второй вывод измерительной диагонали мостовой измерительной цепи соединен со вторым входом (входным выводом) интегратора и вторым входом (входным выводом) компаратора, выход интегратора подключен к первому входу (входному выводу) компаратора, при этом его выход соединен со входом усилителя тока, с третьим входом (входным выводом) интегратора и первым выводом питающей диагонали мостовой измерительной цепи, второй вывод которой соединен с общей шиной питания, выход усилителя тока подключен к входу оптопары, а ее выход соединен со вторым входом (входным выводом) элемента сравнения и с первым входом (входным выводом) блока задания частоты, имеющего второй вход (входной вывод) для подачи сигнала управления, при этом выход блока задания частоты соединен со вторым входом (входным выводом) блока регулирования управляющего напряжения, выход последнего через блок формирования управляющего напряжения соединен со входом усилителя напряжения, выходные выводы которого подключены к выводам (обкладкам) пьезоэлемента.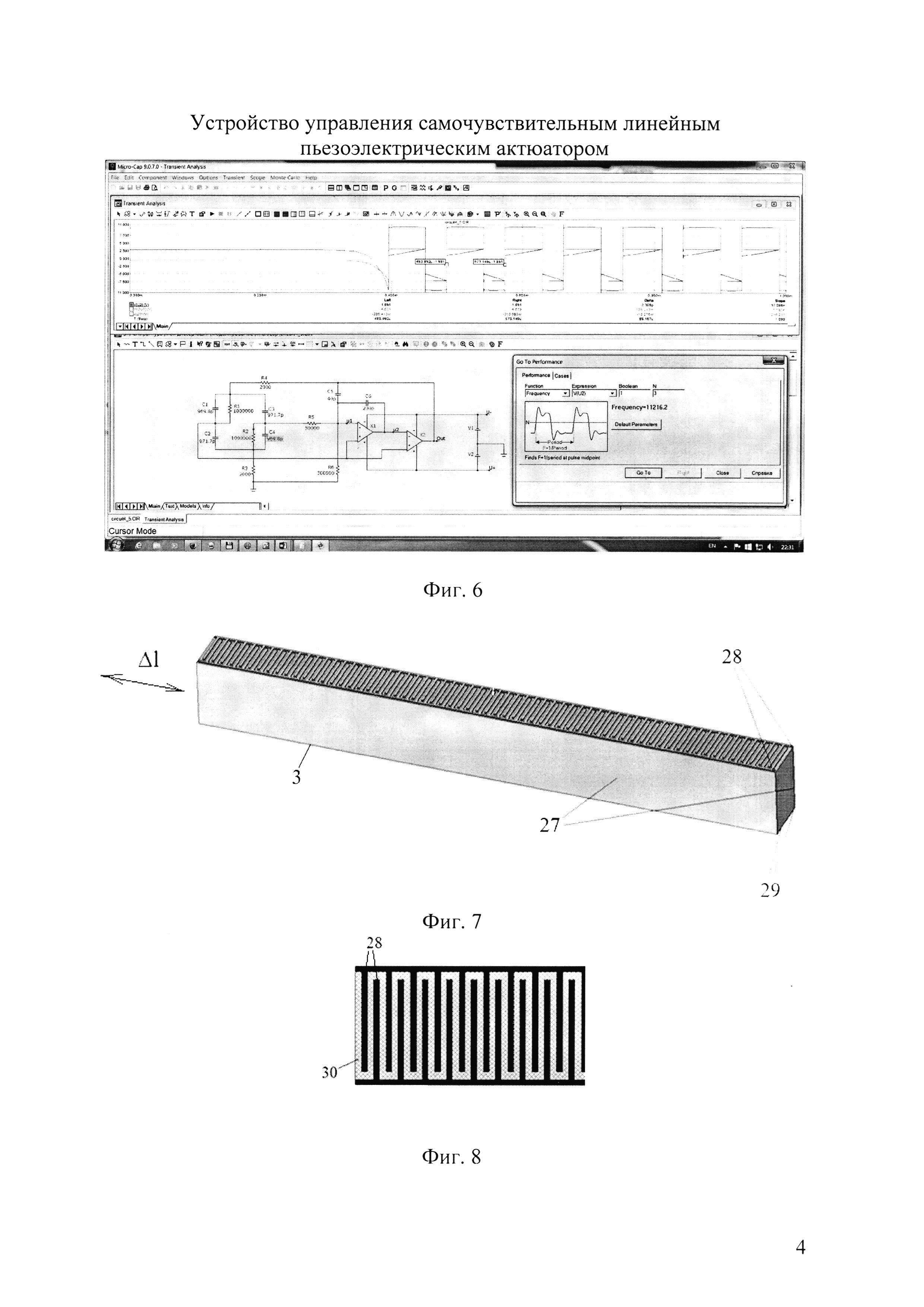
Способ стабилизации тонкопленочной нано- и микроэлектромеханической системы тензорезисторного датчика давления
Способ охраны периметра объекта
Датчик давления на основе нано- и микроэлектромеханической системы повышенной точности и надежности
Способ измерения давления, способ калибровки и датчик давления на основе нано- и микроэлектромеханической системы
Способ изготовления датчика вакуума с наноструктурой и датчик вакуума на его основе
Способ изготовления высокостабильного датчика давления на основе тонкопленочной нано- и микроэлектромеханической системы
Способ изготовления датчика давления на основе тонкопленочной нано- и микроэлектромеханической системы
Электропривод шаговый
Способ измерения давления, калибровки и датчик давления на основе нано- и микроэлектромеханической системы
Способ изготовления датчика вакуума с наноструктурой заданной чувствительности и датчик вакуума на его основе
Способ получения покрытий на поверхностях глухих отверстий деталей из алюминиевых сплавов
Способ стабилизации тонкопленочной нано- и микроэлектромеханической системы тензорезисторного датчика давления
Способ прогнозирования риска отторжения трансплантата при ксенопластике
Способ охраны периметра объекта
Датчик давления на основе нано- и микроэлектромеханической системы повышенной точности и надежности
Способ измерения давления, способ калибровки и датчик давления на основе нано- и микроэлектромеханической системы
Способ изготовления датчика вакуума с наноструктурой и датчик вакуума на его основе
Способ изготовления высокостабильного датчика давления на основе тонкопленочной нано- и микроэлектромеханической системы
Щавелевокислый электролит для осаждения сплава медь-олово
Способ изготовления датчика давления на основе тонкопленочной нано- и микроэлектромеханической системы

