Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОБРАБОТКИ РЫБОПРОМЫСЛОВОЙ ИНФОРМАЦИИ
Вид РИД
Изобретение
Настоящее изобретение относится к сфере морского рыболовного промысла, основанного на использовании гидроакустики для обнаружения и вылова рыбной продукции с использованием траловых орудий лова. Основными техническими средствами в мировой практике, которые обеспечивают получение наиболее полной и всесторонней информации об объектах промысла, являются рыбопоисковые приборы и комплексы, основанные на использовании акустических принципов и метода гидролокации. Значительное число вариантов построения гидролокаторов иностранного и отечественного производства, используемых для обнаружения рыбных скоплений, отличающихся методами технической реализации, обработки гидроакустической информации, способами локации, методами обзора, типами решаемых задач, рассмотрено в монографии Ю.С. Кобяков, Н.Н. Кудрявцев, В.И. Тимошенко. «Конструирование гидроакустической рыбопоисковой аппаратуры». Л.: Судостроение, 1986, стр. 5-50. После обнаружения рыбного скопления осуществляется лов рыбы, который производится различными орудиями лова. Одним из основных и наиболее эффективных орудий лова являются тралы, которые могут выставляться на глубине до 2000 м и на удалении до 4000 м (там же, стр. 27-30). Таким образом, гидролокатор, как источник информации о наличии рыбного скопления, и орудие лова разнесены на большое расстояние и работают они независимо друг от друга, что требует определенных действий для обеспечения точного наведения трала на рыбное скопление. Для этого разработаны методы комплексирования аппаратуры, которая обеспечивает наведение трала на рыбное скопление (там же, стр. 30-36). Аппаратура обеспечивает обработку информации от гидроакустических и навигационных приборов и представление результатов обработки на экран дисплея с отображением взаимного положения судна, орудий лова и обнаруженных скоплений рыбы. Этот способ последовательного комплексирования информации содержит получение и отображения на общем индикаторе информации от гидролокатора, получение информации от эхолота, получение информации от параметров контроля положения трала, от доплеровского гидроакустического лага, гирокомпаса, определение параметров отклонения положения трала по курсовому углу, изменение положения трала в соответствии с выработанными ошибками (А.И. Тикунов. «Рыбопоисковые приборы и комплексы». Л.: Судостроение, 1989, стр. 156-164). Аппаратура предназначена для отображения промысловой ситуации на экране общего дисплея, поступающей от гидролокатора, эхолота, лага, гирокомпаса, и управления работой гидролокатора и тралом. Задачей использования комплекта аппаратуры является управление работой гидролокатора и тралом. Этот способ последовательных действий может быть взят нами за прототип.
Гидроакустический способ обработки рыбопромысловой информации содержит излучение сигнала гидролокатором, прием эхосигнала однолепестковой характеристикой направленности (там же, стр. 111), сканирование ХН в горизонтальной и вертикальной плоскостях, отображение на самописце или индикаторе гидролокатора эхосигналов и визуальное обнаружение рыбного скопления, определение координат положения обнаруженного рыбного скопления и дистанции до него по положению эхосигналов на самописце и передача данных на аппаратуру отображения промысловой ситуации, прием автономной антенной данных датчиков акустической связи, которые установлены на трале и определяют положение трала по глубине, и отображение положения трала на дисплее аппаратуры рыбопромысловой ситуации, при достижении местоположения рыбного скопления измерение эхолотом глубины рыбного скопления и наведение трала по глубине на рыбное скопление.
Информация, поступающая от гидролокатора прототипа, да и большинства используемых гидролокаторов (там же, стр. 110-140, а также Долгов А.Н., Раскита М.А. «Разработка структуры ГАК и требований к алгоритмам для обнаружения и подсчета рыб». Труды 10 Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики» СПб.: Наука, 2010, стр. 134-136), отображает положение рыбного скопления непосредственно в момент обнаружения и регистрирует его на дисплее или самописце, который и хранит изображение относительно положения направления движения рыболовного судна. Это обеспечивается наведением антенны на рыбное скопление. После достижения рыбного скопления судном эхолотом, антенна которого направлена вертикально вниз, измеряется глубина нахождения рыбного скопления. Глубина положения трала определяется по датчикам, установленным на трале и величине вытравленного тралового троса, что фиксируется в системе расчетов, где происходит сопоставление положения судна и положение трала. В прототипе все эти данные выводятся на единый дисплей отображения рыбопромысловой информации, обрабатываются и вычисляются прогнозные оценки положения рыболовецкого судна, положение трала и смещение положения рыбного скопления относительно рыболовецкого судна и трала. Таким образом, оценивается прошлое положение трала и прошлое положение рыболовецкого судна и вырабатывается ошибка отклонения относительно прогнозируемых положений. За время сбора рыбопромысловой информации может измениться положение рыбного скопления и сместиться положение рыболовецкого судна и положение трала, что приведет к ошибкам в наведении трала на рыбное скопление.
Таким образом, недостатком этого способа обработки рыбопромысловой информации является необходимость использования большого числа источников информации, разнесенных по пространству и по времени, что не всегда может обеспечить надежное наведение трала на рыбное скопление.
Задачей изобретения является повышение эффективности работы гидролокатора рыболовного судна.
Техническим результатом использования предлагаемого изобретения является повышение точности наведения рыболовного трала на обнаруженное рыбное скопление и сокращение времени наведения трала.
Для достижении указанного технического результата в гидроакустический способ обработки рыбопромысловой информации, содержащий обнаружение рыбного скопления гидролокатором, прием и отображение данных автономных датчиков акустической связи, установленных на трале и наведение трала на рыбное скопление, введены новые признаки, а именно в качестве антенны гидролокатора используют сферическую антенну, на основе которой формируют сферическую совокупность характеристик направленности (ХН), обеспечивающую одновременное всестороннее освещение водного пространства относительно положения корпуса рыболовного судна, обнаружение рыбного скопления осуществляют носовыми ХН сферической антенны с упреждением по ходу движения рыболовного судна, автоматически измеряют дистанцию до рыбного скопления, измеряют пространственное положение рыбного скопления относительно направления движения гидролокатора, дистанционно измеряют глубину погружения рыбного скопления, определяют кормовыми ХН сферической антенны пространственное положение трала и отображают одновременно положение гидролокатора и рыбного скопления, сравнивают измеренную глубину погружения рыбного скопления с глубиной погружения трала и устанавливают глубину погружения трала равной глубине погружения рыбного скопления, и направление движения трала совмещают с направлением движения гидролокатора на пространственное положение рыбного скопления
Поясним достижение положительного результата.
Использование сферической антенны и формирование на ее основе картины освещения окружающего пространства существенно меняет процедуру обнаружения рыбных скоплений и процедуру обработки рыбопромысловой ситуации. Рыбные скопления могут быть обнаружены задолго до подхода рыболовного судна к ним по информации, полученной при обработке характеристик направленности, ориентированных в сторону направления движения. Одновременно с этим кормовыми характеристиками направленности можно обнаруживать эхосигналы от трала и наблюдать положение и движение трала и сравнивать с реальным положением рыбного скопления. Эти положения можно наблюдать в реальном масштабе времени и своевременно проводить корректировку положения трала относительно рыбного скопления. Особой задачей стоит необходимость измерения глубины погружения рыбного скопления, обнаруженного носовыми характеристиками направленности впереди по курсу движения. Обычно измеряют глубину погружения рыбного скопления расположенного непосредственно под рыболовным судном по эхосигналам, отраженным от дна и от рыбного скопления с использованием отдельного гидролокатора - эхолота. В предлагаемом техническом решении для этой задачи можно использовать патент РФ №2350983, который позволяет определять глубину погружения малоподвижного объекта с упреждением впереди движения гидролокатора по нескольким циклам излучения - прием. Для реализации этого способа достаточно измерения дистанции и измерения собственной скорости с использованием стандартной аппаратуры. Гидроакустическая антенна сферической формы для гидролокатора является известным устройством, которое может быть выполнено на основании патента РФ №2460092. Сферическая антенна может обеспечить сканирование трехмерного подводного пространства в максимально широком диапазоне телесных углов, что позволит отслеживать положение рыбного скопления и положение трала в течение длительного времени и обеспечивать необходимую точность наведения трала на рыбное скопление. Кроме того, можно наблюдать сам процесс захвата рыбного скопления тралом и оценивать качество наведения.
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый гидроакустический способ обработки рыбопромысловой информации
На фиг. 1 гидролокатор 1, содержащий сферическую антенну 2, через блок 7 излучения и коммутации соединенную с системой 3 формирования характеристик направленности, блоком 4 обнаружения и пороговой обработки, первый выход которого соединен через блок 5 обработки сигналов рыбного скопления с первым входом спецпроцессора 8 управления положением трала, а второй выход через блок 6 измерения положения трала по кормовым характеристикам направленности со вторым входом блока 8, выход которого соединен со входом спецпроцессора 12 отображения общей обстановки и выдачи команд управления, выход которого соединен со вторым входом блока 7 излучения и коммутации. Блок 9 автономных датчиков определения положения трала по глубине и направлению соединен с третьим входом спецпроцессора 8, четвертый вход спецпроцессора 8 соединен с блоком 10 измерения собственной скорости, а пятый вход спецпроцессора 8 соединен блоком 11 определения глубины дна.
Предложенный способ с помощью представленного выше устройства реализуется следующим образом. Сигнал о начале работы поступает из блока12 спецпроцессора отображения общей обстановки и выдачи команд управления на блок 7 излучения и коммутации, который формирует зондирующий сигнал и через сферическую антенну 2 и систему 3 формирования характеристик направленности излучается в промысловую водную среду. Отраженные эхосигналы через сферическую антенну 2 поступают на систему 3 формирования характеристик направленности, где происходит пространственная селекция принятых сигналов. Временная информация по каждому пространственному каналу передается в блок 4 обнаружения и пороговой обработки. В блоке 4 производится выбор порога и обнаружение превышения амплитуды сигнала выбранного порога в каждом пространственном канале. Эти операции являются известными, и они используются во всех современных гидролокаторах (Ю.С. Кобяков, Н.Н. Кудрявцев, В.И. Тимошенко. «Конструирование гидроакустической рыбопоисковой аппаратуры». Л.: Судостроение, 1986). Наибольший интерес для работы представляют носовые пространственные каналы, которые обрабатывают в блоке 5 обработки сигналы рыбного скопления. По кормовым характеристикам направленности, которые обрабатываются в блоке 6, можно определить положение трала и измерить до него дистанцию. Полученная информация в виде амплитудных и временных отсчетов поступает через спецпроцессор 8 управления положением трала на спецпроцессор 12 отображения общей обстановки и выдачи команд управления. Кроме того, в блок 8 поступают текущие измеренные координаты рыбного скопления и текущие измеренные координаты положения трала из блока 9. В спецпроцессоре 8 управления положением трала по измеренным текущим координатам отслеживается положение трала относительно рыбного скопления. Для точного расчета команд управления движением трала используется дополнительная информация, которая поступает от блока 9 автономных датчиков определения положения трала по глубине и по направлению от блока 10 измерения собственной скорости и от блока 11 определения глубины дна под тралом. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала. Вопросы реализации спецпроцессоров достаточно подробно рассмотрены в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург: «Наука», 2004, стр. 281. Гидроакустические измерители скорости движения являются известными устройствами, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский, Д.Б. Островский. Гидроакустические навигационные и поисково-обследовательские средства. Санкт Петербург, 2009. Изд. ЛЭТИ, стр. 40-81). Определение глубины дна производится с использованием известных навигационных и многолучевых эхолотов, которые выпускаются серийно во всех развитых странах (Д.Е Левашев. «Современные суда и судовое оборудование для промысловых исследований». М.: Изд. ВНИРО, 2010, стр. 84-90). Там же приведены конкретные приборы дистанционного контроля орудий лова на стр 80-84, которые имеют цифровой выход и могут сопрягаться практически со всеми цифровыми спецпроцессорами обработки информации. Таким образом, в блоке 12 отображается вся текущая информация по положению рыбного скопления и положению трала, все измеренные координаты по рыбному скоплению и тралу и прогнозируемое положение трала относительно рыбного скопления и соответствующие команды управления из блока 8. Для решения наших задач будут использоваться текущие измерения по каждой посылке по упрежденным измерениям рыбного скопления, упрежденному измерению положения рыбного скопления по глубине и по направлению и реальному положению трала. По этим данным могут вырабатываться ошибки положения трала по глубине и по направлению и вырабатываться команды на изменение положения трала для точного совмещения с положением рыбного скопления.
Таким образом, на общем экране отображается промысловая ситуация с одновременным отображением положения рыбного скопления, промыслового судна и трала и их взаимное перемещение в реальном масштабе времени, что позволяет обеспечить решение поставленной задачи.
Гидроакустический способ обработки рыбопромысловой информации, содержащий обнаружение рыбного скопления гидролокатором, прием и отображение данных автономных датчиков акустической связи, установленных на трале, и наведение трала на рыбное скопление, отличающийся тем, что в качестве антенны гидролокатора используют сферическую антенну, на основе которой формируют сферическую совокупность характеристик направленности (ХН), обеспечивающую одновременное всестороннее освещение водного пространства относительно положения корпуса рыболовного судна, обнаружение рыбного скопления осуществляют носовыми ХН сферической антенны с упреждением по ходу движения рыболовного судна, автоматически измеряют дистанцию до рыбного скопления, измеряют пространственное положение рыбного скопления относительно направления движения гидролокатора, дистанционно измеряют глубину погружения рыбного скопления, определяют кормовыми ХН сферической антенны пространственное положение трала и отображают одновременно положение гидролокатора и рыбного скопления, сравнивают измеренную глубину погружения рыбного скопления с глубиной погружения трала и устанавливают глубину погружения трала равной глубине погружения рыбного скопления, и направление движения трала совмещают с направлением движения гидролокатора на пространственное положение рыбного скопления.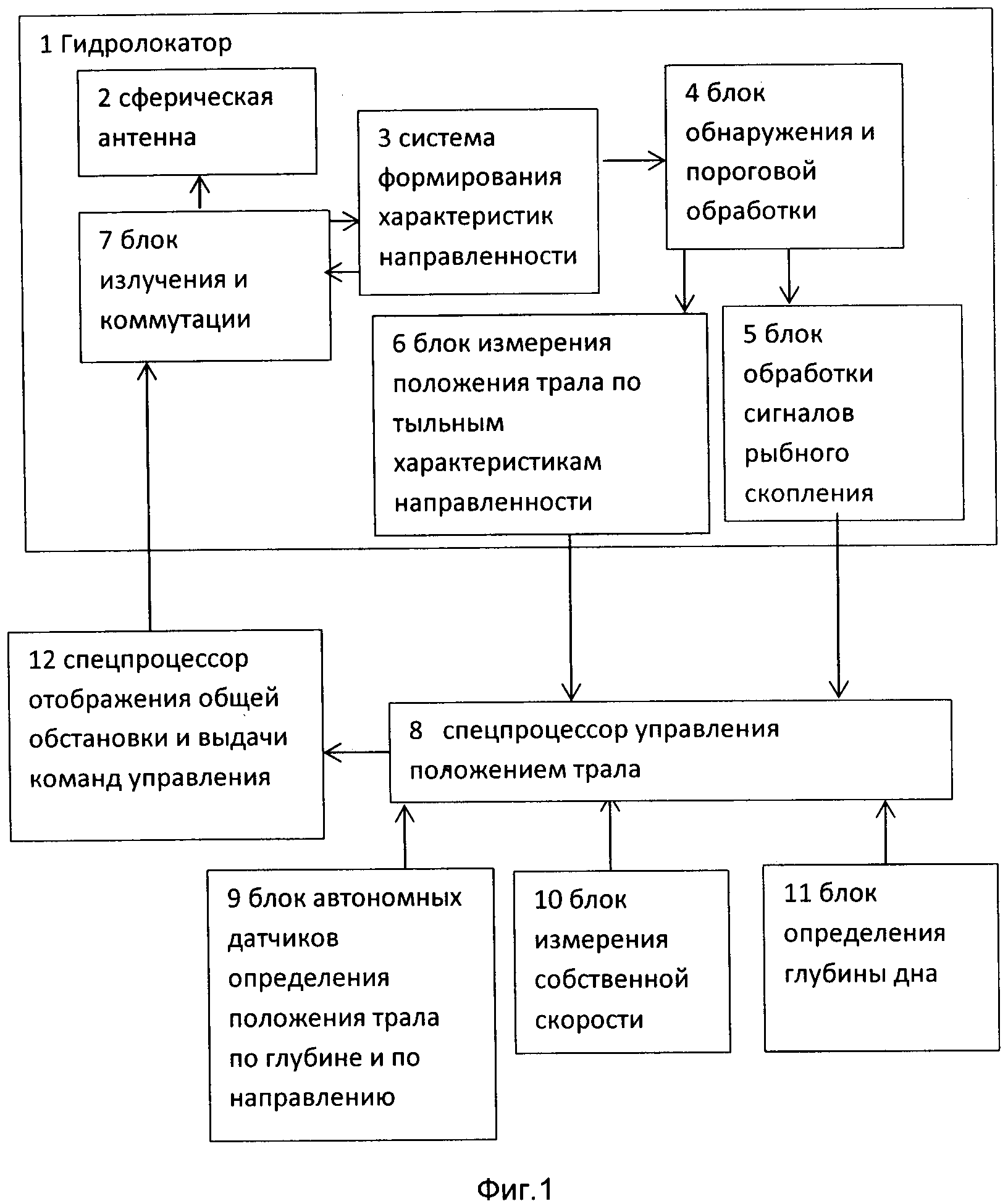
Способ определения текущих координат цели в бистатическом режиме гидролокации
Активный гидролокатор
Устройство получения информации о шумящем в море объекте
Способ обработки гидролокационной информации
Система и способ измерения акустических характеристик антенн с помощью подводного аппарата
Способ измерения скорости движения цели гидролокатором
Способ определения координат движущихся источников излучения пассивным гидролокатором
Способ обработки гидролокационной информации
Способ определения глубины погружения объекта
Способ классификации эхо-сигнала гидролокатора
Способ автоматической классификации
Способ классификации эхо-сигнала гидролокатора
Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи
Способ обработки гидролокационной информации
Способ обнаружения и определения дистанции с помощью взрывного сигнала в гидроакустической локальной сетевой системе связи
Гидролокационный способ обнаружения объекта и измерения его параметров
Способ классификации гидроакустических сигналов шумоизлучения морских объектов
Способ отображения гидролокационной информации
Способ обработки и классификации гидролокационной информации
Способ отображения гидролокационной информации

