Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ДОСТОВЕРНОГО ДВУМЕРНОГО ВЕКТОРА УГЛОВОЙ СКОРОСТИ ОТНОСИТЕЛЬНО ПОПЕРЕЧНЫХ ОСЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА И ИДЕНТИФИКАЦИИ ОТКАЗОВ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ
Вид РИД
Изобретение
Изобретение относится к области создания систем управления (СУ) летательных аппаратов (ЛА) с избыточным числом датчиков угловой скорости (ДУС), измеряющих угловые скорости ЛА относительно его поперечных осей.
Указанная информация используется в системах угловой стабилизации ЛА для демпфирования упругих колебаний корпуса относительно его поперечных осей.
Известен способ определения информации тракта акселерометров в составе трех каналов по три грани в каждом из каналов с коллинеарными осями чувствительности акселерометров каждого канала [1]. Аналогичное построение структурной схемы измерительного тракта применяется и при получении информации поперечных угловых скоростей с той разницей, что для стабилизации упругости достаточно двух проекций угловой скорости и соответственно измеряемый вектор должен быть двумерным.
Применительно к тракту ДУС известный способ отбора достоверной информации имеет те же недостатки, как в тракте акселерометров:
1. Увеличение веса, габаритов и стоимости аппаратуры вследствие применения конфигурации, состоящей из шести ДУС;
2. Невысокий уровень защищенности от отказов. Тракт из шести ДУС сохраняет работоспособность при двух отказах измерителей разных каналов, в случае отказа двух ДУС одного канала работоспособность измерительного тракта нарушается.
3. Недостаток традиционной структуры также состоит в снижении точности вычисления значений угловых скоростей методом поиска среднего по уровню вследствие неиспользования избыточной информации исправных датчиков. Известный способ определения достоверной информации взятием среднего по уровню из трех для отбора достоверной информации в конфигурации с четырьмя ДУС неприменим.
Задачей изобретения является определение достоверного двумерного вектора угловой скорости относительно поперечных осей летательного аппарата, ближайшего к измеряемому исправными датчиками, что позволяет обеспечить безотказную работу измерительного тракта ДУС и идентифицировать отказы с определением номера неисправного ДУС.
Технический результат достигается тем, что в способе определения достоверного двумерного вектора угловой скорости относительно поперечных осей ЛА, основанном на показаниях, полученных в результате циклического синхронного опроса четырех ДУС, измерительные оси которых лежат в плоскости, ортогональной продольной оси ЛА, и неколлинеарны между собой, и вычислении достоверного вектора с использованием значений направляющих косинусов измерительных осей ДУС, согласно изобретению двумерные векторы вычисляют при всех возможных комбинациях пар ДУС. Полученные векторы распределяют по группам, которые состоят из трёх двумерных векторов, вычисленных по показаниям трех ДУС. По векторам групп рассчитывают средние векторы и показатели разброса относительно среднего вектора. Находят минимальный из показателей разброса всех групп в текущем цикле и средний вектор группы с минимальным показателем разброса принимают за достоверный вектор, ближайший к измеряемому в текущем цикле. Отказы ДУС идентифицируют, исходя из исправности измерителей, по показаниям которых вычислен достоверный вектор, и результата сравнения с допуском модуля разности фактического показателя измерителя, которое не использовано в расчете достоверного вектора и его расчетного показания. При этом расчетное показание определяют как проекцию достоверного вектора на измерительную ось проверяемого ДУС. Упомянутый допуск устанавливают исходя из погрешности измерений ДУС.
Поставленная техническая задача решается следующим образом.
Осуществляется циклический синхронный опрос датчиков угловой скорости. Синхронность опроса датчиков тракта обеспечивает идентичность векторов, вычисляемых по показаниям исправных датчиков.
По показаниям ДУС в текущем цикле опроса вычисляются компоненты измеряемого вектора. Для всех возможных комбинаций ДУС решаются системы из двух линейных уравнений, составленных как скалярные произведения матрицы направляющих косинусов осей ДУС на искомый измеряемый двумерный вектор, компонентами которого являются угловые скорости ЛА относительно поперечных осей:
где
 - матрица направляющих косинусов
- матрица направляющих косинусов
 - искомый вектор, определенный по показателям измерителей i, j.
- искомый вектор, определенный по показателям измерителей i, j.
Минимальное количество измерителей, обеспечивающее безотказную работу тракта поперечных угловых скоростей до одного отказа, равно четырем.
Число возможных двумерных векторов, рассчитанных по парам измерителей, равно числу сочетаний из четырех по два, т.е.  .
.
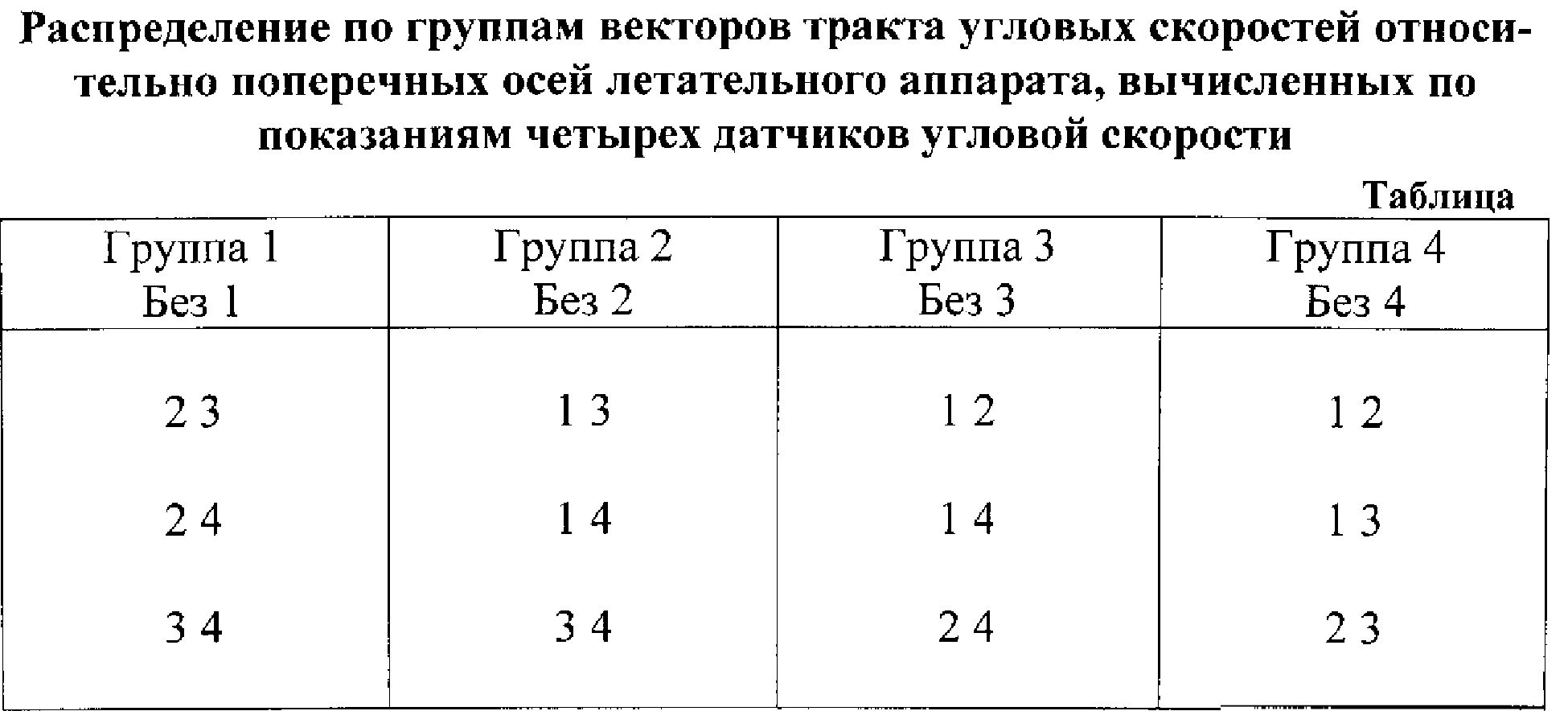
Полученные шесть векторов распределяют по группам, каждая группа состоит из трех векторов, рассчитанных по показаниям трех измерителей. Так, первая группа включает векторы, вычисленные по показаниям измерителей с номерами 2, 3, 4, обозначенные как 23, 24, 34. Показания измерителя с номером 1 в расчете векторов первой группы не используются.
Число групп по три вектора равно числу сочетаний из четырех по три, т.е.  . Состав групп с указанием номеров неиспользуемых измерителей представлен в приложении табл. 1.
. Состав групп с указанием номеров неиспользуемых измерителей представлен в приложении табл. 1.
В каждой группе определяют средний вектор и показатель разброса векторов группы относительно среднего.
Так, средний вектор первой группы определяется как:

Показатель разброса первой группы записывается следующим образом:

При четырех измерителях тракта и работе до одного отказа достоверный двумерный вектор тракта поперечных угловых скоростей, ближайший к измеряемому, определяется как средний вектор группы с минимальным показателем разброса из всех (четырех) групп тракта. Достоверный вектор определяется по показаниям всех исправных измерителей с учетом возможной избыточности информации. Если все измерители тракта исправны, отбор достоверного вектора осуществляется по шести векторам, размещенным в четырех группах, в случае отказа - по трем векторам одной группы. При этом три измерителя, показания которых используются при вычислении достоверного вектора, исправны.
Предлагаемый способ дополнен решением, направленным на повышение живучести тракта измерения поперечных угловых скоростей за счет возможности продолжения функционирования при возникновении нештатной ситуации с одновременным отказом двух измерителей тракта из четырех. Данная задача решается выделением из шести векторов тракта единственного вектора, полученного обработкой показаний двух исправных измерителей.
С этой целью выполняются следующие действия. Вычисленный достоверный вектор текущего цикла сравнивается с достоверным вектором предыдущего цикла. Достоверный вектор предыдущего цикла представляет собой достоверный вектор, вычисленный по показаниям измерителей в текущем цикле и записанный в память вычислителя, предназначенную для размещения информации, необходимой для расчета достоверного вектора по показаниям в следующем цикле.
Если модуль разности достоверных векторов текущего и предыдущего циклов превышает допуск, определяемый угловыми ускорениями ЛА относительно поперечных осей на траектории полета, то число отказов измерителей больше одного.
Если в этом случае из векторов тракта (шести) может быть выявлен вектор, модуль разности которого с достоверным вектором предыдущего цикла меньше допуска, то выявленный вектор является единственным из векторов тракта, соответствующим измеряемому вектору.
Выявленный вектор тракта при двух отказах принимают за достоверный в текущем цикле, заменяя им средний вектор группы с минимальным показателем разброса, модуль разности которого с достоверным вектором предыдущего цикла оказался больше допуска.
Неисправными при двух отказах являются два измерителя, показания которых не использованы в расчете вектора тракта, принятого за достоверный.
Технические результаты предлагаемого изобретения состоят в следующем:
1. Обеспечение безотказной работы до одного отказа тракта датчиков угловых скоростей относительно поперечных осей ЛА при минимальном количестве датчиков, равном четырем.
2. Идентификация отказа с указанием номера неисправного измерителя.
3. Формирование в результате отбора достоверного двумерного вектора поперечных угловых скоростей, ближайшего к измеряемым. Этому способствуют оптимальный бездопусковый отбор показаний всех исправных датчиков с повышением точности за счет избыточной информации возможных комбинаций пар измерителей.
4. Предотвращение аварии ЛА при отказе двух ДУС.
Работоспособность предлагаемого решения подтверждена результатами моделирования полета ЛА.
Таким образом, заявлен способ определения достоверного двумерного вектора угловой скорости относительно поперечных осей летательного аппарата и идентификации отказов датчиков угловой скорости, основанный на показаниях, полученных в результате циклического синхронного опроса четырех ДУС, измерительные оси которых лежат в плоскости, ортогональной продольный оси ЛА, и неколлинеарны между собой, и вычислении достоверного вектора с использованием значений направляющих косинусов измерительных осей ДУС.
Отличительной особенностью способа является то, что двумерные векторы угловых скоростей вычисляют при всех возможных комбинациях пар ДУС.
Полученные векторы распределяют по группам, которые состоят из трех двумерных векторов, вычисленных по показаниям трех ДУС. По векторам в каждой группе рассчитывают средний вектор и показатель разброса относительно среднего вектора. Находят минимальный показатель разброса всех групп в текущем цикле и средний вектор группы с минимальным показателем разброса принимают за достоверный вектор, ближайший к измеряемому в текущем цикле. Отказы ДУСов идентифицируют, исходя из исправности измерителей, по показаниям которых вычислен достоверный вектор, и результата сравнения с допуском модуля разности фактического показания измерителя, которое не использовано в расчете достоверного вектора и его расчетного показания. При этом расчетное показание определяют как проекцию достоверного вектора на измерительную ось проверяемого ДУС (см. таблицу).
Литература
1. «Системы наведения» под ред. Л.А. Майбороды и В.М. Миронова, МО СССР, 1986 г., стр. 294-295.
Устройство преобразования информации
Электромеханический привод
Планетарно-цевочный электропривод
Контактирующее устройство
Способ стабилизации структурно неустойчивого осциллятора жидкости разгонных блоков и верхних ступеней ракет-носителей
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ компенсации потери тяги двигателями ориентации разгонного блока
Перестраиваемое мажоритарное устройство
Устройство для формирования установочного импульса
Способ управления программным разворотом разгонного блока
Волновой твердотельный гироскоп
Перестраиваемое мажоритарное устройство
Устройство для формирования установочного импульса

