Результат интеллектуальной деятельности: СПОСОБ РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для уборки зерновых культур, и может быть использовано для автоматического регулирования загрузки и стабилизации режимов рабочих органов зерноуборочных комбайнов.
Известен способ автоматического регулирования загрузки зерноуборочного комбайна, заключающийся в измерении частоты вращения молотильного барабана, при котором с целью повышения точности регулирования путем исключения влияния нагрузки на ходовую часть, в ручном режиме работы измеряют частоту вращения вала двигателя, определяют отношение частоты вращения молотильного барабана к частоте вращения вала двигателя и запоминают его, при этом в автоматическом режиме работы непрерывно измеряют частоту вращения молотильного барабана и вала двигателя, определяют отношение измеренных величин, сравнивают его с запомненным в ручном режиме работы, принимают это отношение за сигнал рассогласования и в зависимости от значения этого сигнала регулируют поступательную скорость комбайна /Патент №2009632. Способ автоматического регулирования загрузки зерноуборочного комбайна/.
Недостатком данного решения является отслеживание загрузки зерноуборочного комбайна по снижению частоты вращения молотильного барабана без учета качественных показателей обмолота.
Известен способ регулирования подачи хлебной массы в зерноуборочный комбайн, включающий контроль потерь зерна за зерноуборочным комбайном, регулирование скорости движения зерноуборочного комбайна и определение оптимальной подачи хлебной массы, при котором определяют мощность, подводимую к валу битера, расположенного на входе в наклонную камеру, при различных значениях частоты его вращения и находят ее наименьшее значение, а скорость движения комбайна, соответствующую оптимальной подаче хлебной массы, устанавливают по наименьшему значению мощности, подводимой к валу битера. Устройство для регулирования подачи хлебной массы в зерноуборочный комбайн, содержит битер, расположенный на входе в наклонную камеру, регулятор скорости, устройство для контроля потерь зерна за зерноуборочным комбайном, причем вал битера снабжен датчиком частоты вращения и соединен с валом гидромотора, подключенного гидролинией с установленным в ней датчиком давления к насосу, оснащенному регулятором рабочего объема, причем датчики частоты вращения и давления подключены к первому и второму входам блока управления, а регулятор рабочего объема насоса соединен с первым выходом блока управления /Патент №2229208. Способ регулирования подачи хлебной массы в зерноуборочный комбайн и устройство для его осуществления, принят за прототип/.
Недостатками способа и устройства являются достаточная сложность и настройка системы, а также необъективный контроль потерь из-за установки датчиков в конце соломотряса и решет, что не дает полной информации о процессе выделения зерна по длине соломотряса и решет. При этом регистрируются конечные значения потерь зерна, которые нередко могут быть ошибочными за счет продольных наклонов и поперечных кренов самоходной сельхозмашины в процессе уборки. Например, при работе комбайна под уклон в продольном направлении фракции вороха могут осыпаться мимо датчика и естественно при этом не фиксируются, одновременно с этим происходит «затормаживание» прохода вороха по соломотрясу и решетам, что нарушает наилучшие условия сепарации зерна из соломы и половы. Это ведет к искажению объективной информации о выделении и потерях зерна.
Дополнительно искажается точность измерения фактических потерь в конце соломотряса и решет из-за влияния последующих рабочих органов: измельчитель, копнитель, которые создают переменные условия работы соломотряса и решет - заполнение и опорожнение копнителя, переменный воздушный поток от измельчителя и т.п. Поэтому установка датчиков для контроля потерь в конце соломотряса и решет не эффективна.
В связи с этим, целесообразно отслеживать сепарацию по всей длине соломотряса и решет, что дает объективную информацию о выделении и снижении удельной массы зерна в ворохе до оптимального уровня в соответствии с расчетной кривой сепарации зерна.
На основе анализа расчетной и фактической кривых сепарации зерна на соломотрясе установлено, что в начале соломотряса процесс сепарации неустойчивый, вследствие действия отбойного битера и неравномерной загрузки. Устойчивость процесса сепарации наступает после прохождения ворохом не менее 1/3 длины соломотряса, что подтверждается полной согласованностью данных фактической и расчетной сепарации зерна /А.Д. Логин, Е.А. Горбачев, В.М. Медведчиков. Теоретические предпосылки определения потерь зерна в соломе/. Поэтому точность измерения потерь зерна будет достигнута путем отслеживания сепарации зерна в средней части соломотряса и решет, где имеет место устойчивый режим выделения зерна.
Техническая задача - повышение качественных показателей молотильно-сепарирующего устройства зерноуборочного комбайна за счет регулирования загрузки на основе контроля выделения зерна в устойчивом режиме сепарации на средней части соломотряса и решет.
Это достигается тем, что в процессе работы зерноуборочного комбайна производят замер выделенного зерна на соломотрясе и верхних решетах в местах, расположенных в средней их части, ограниченной 1/3 их длины от начала и конца указанных рабочих органов, полученные данные соотносят с расчетной кривой сепарации зерна для данного типа комбайна в оптимальных условиях, тем самым оценивают общую тенденцию снижения зерна в зерновом ворохе, принимают отклонения фактических значений от расчетных за сигнал для управления загрузкой и в зависимости от значения этого сигнала регулируют поступательную скорость комбайна.
Для этого решета и соломотряс зерноуборочного дополнительно снабжены датчиками, установленными в средней части этих рабочих органов, где имеет место устойчивый процесс выделения зерна. Указанные датчики соединены с блоком управления, который в свою очередь сравнивает поступающие значения с данными расчетной кривой сепарации зерна при оптимальной загрузке молотилки зерноуборочного комбайна, исчисляет разницу между значениями и вырабатывает сигнал для управления поступательной скоростью комбайна.
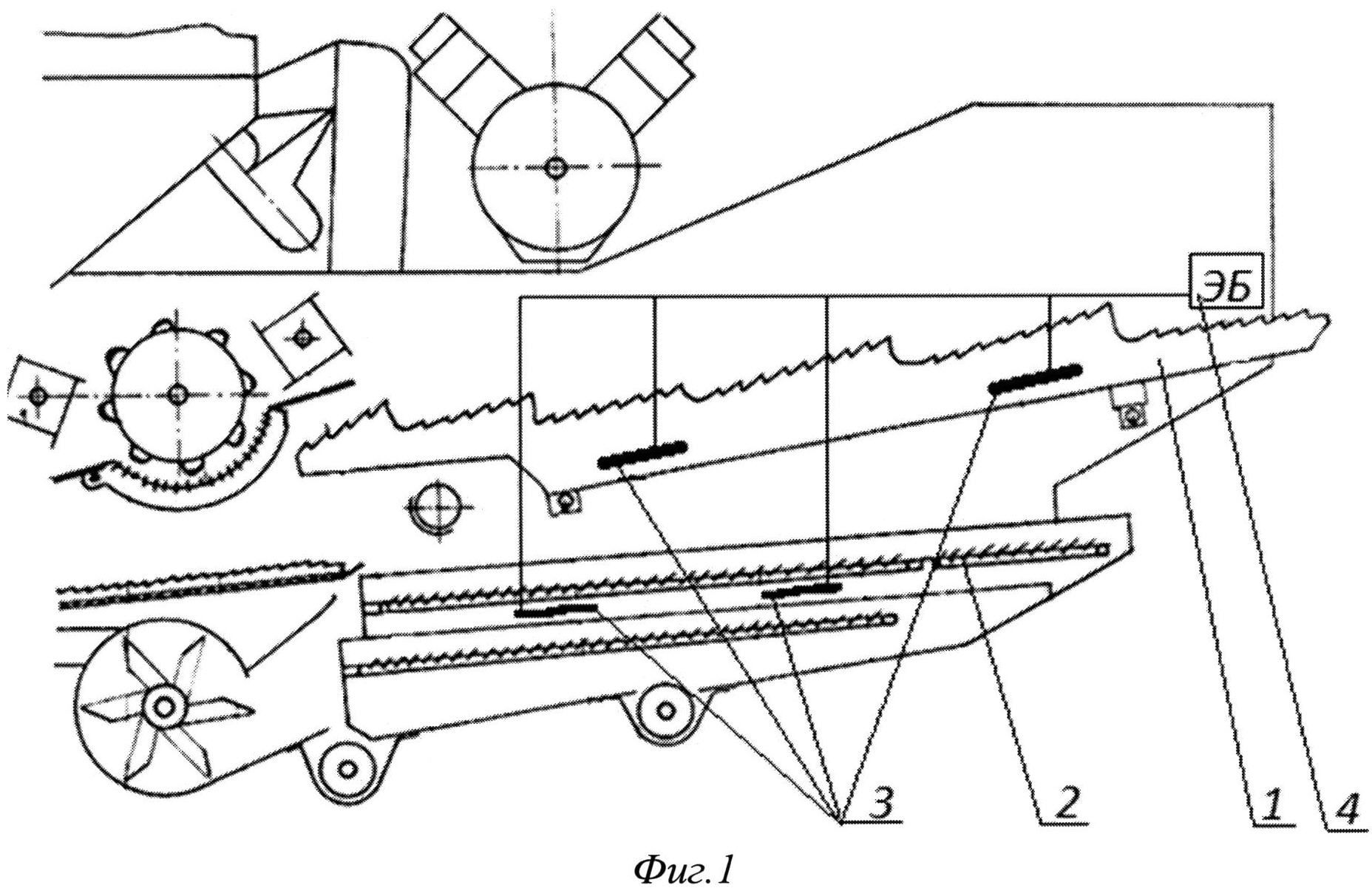
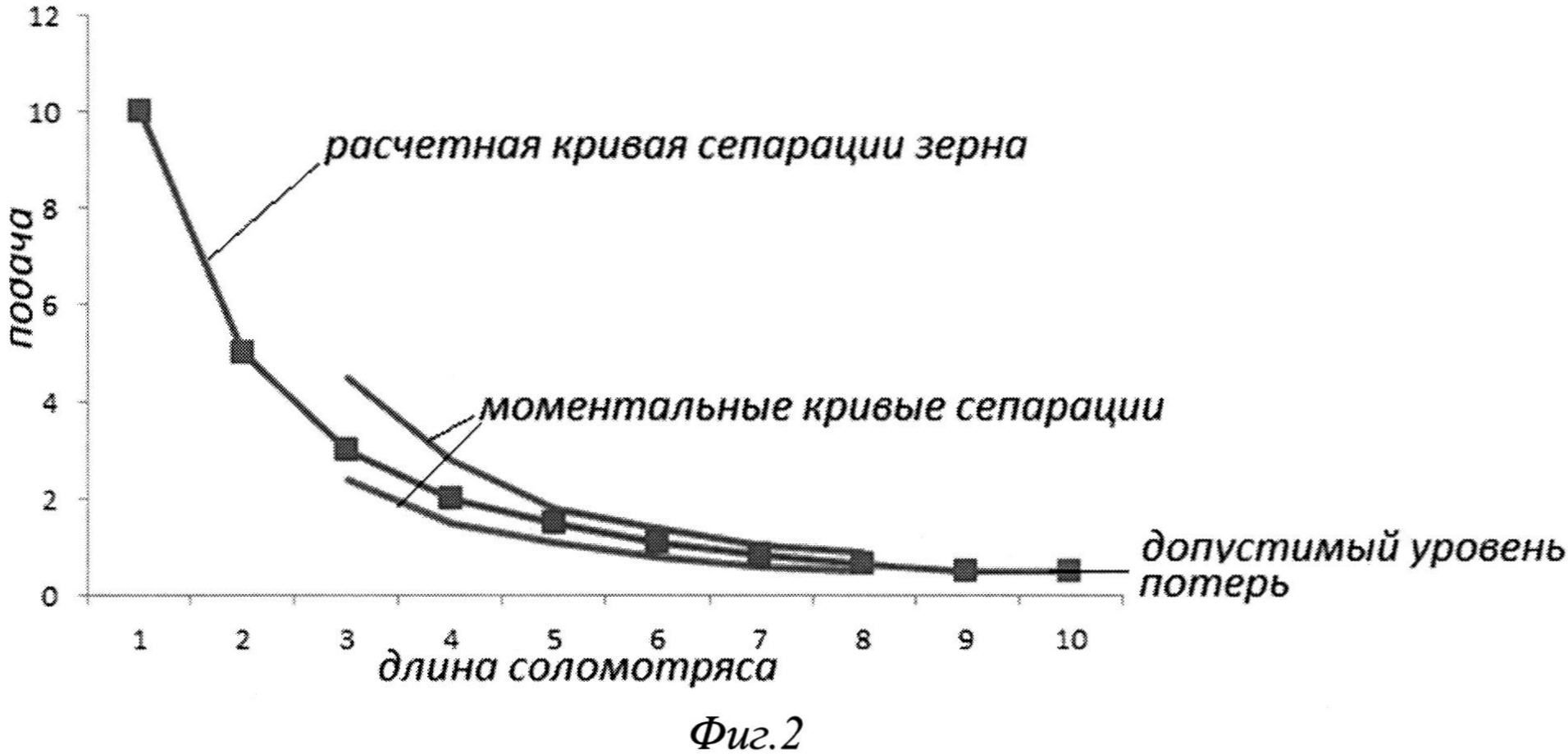
На фиг. 1 схематически изображена молотильно-сепарирующая система зерноуборочного комбайна, на фиг. 2 представлены кривые сепарации зерна на соломотрясе.
На клавишах соломотряса 1 и под верхним решетом 2, в местах удаленных на 1/3 их длины от начала и конца указанных рабочих органов посредством кронштейнов закреплены датчики контроля зерна 3, которые электрически связаны с блоком управления 4.
Устройство для осуществления способа работает следующим образом.
Зерновой ворох, выходящий из молотильного аппарата, попадает на соломотряс 1 и решета 2. В начале этих рабочих органов происходит наибольшее выделение зерен из вороха, на последующих участках процесс выделения зерна затухает. Зерна, выделенные на соломотрясе и решетах в средней части, падают на датчики 3, которые передают информацию в блок управления 4. По совокупности данных от датчиков блок управления строит моментальную кривую фактического процесса выделения зерна, что является исходной объективной информацией об уровне потерь. Тем самым рассчитываются конечные потери за соломотрясом и решетами без искажений результатов от кренов остова комбайна и влияния смежных рабочих органов. Эта информация служит критерием загрузки зерноуборочного комбайна, если кривая фактических значений сепарации зерна «опустилась» ниже расчетной кривой (Фиг. 2), то блок управления вырабатывает команду на увеличение скорости движения комбайна и наоборот.
Устройство для регулирования давления наддува двигателя внутреннего сгорания
Устройство для непрерывного определения твердости почвы
Способ создания нагрузки для испытания и приработки автотракторных агрегатов
Способ работы дизельного двигателя в пусковой и послепусковой периоды
Способ определения технического состояния двигателей внутреннего сгорания и устройство для его осуществления
Способ предубойного содержания птицы
Способ повышения качества меха и продукции кролиководства
Способ газотермического напыления полимерных покрытий на металлические изделия и конструкции
Способ оценки кадмия в печени и легких крупного рогатого скота
Способ определения содержания меди в мышечной ткани рыбы
Поилка для искусственного кормления козлят
Способ оценки технического состояния двигателя внутреннего сгорания
Способ производства зернокормовых смесей для животноводства
Установка для поения телят молочного периода
Способ нанесения износостойких покрытий на стальные изделия
Система автоматического поддержания оптимальных температур рабочих жидкостей и масел в агрегатах и узлах самоходных машин
Способ оценки биологической ценности молочных продуктов
Газожидкостный кожухотрубный теплообменник с автоматической системой управления процессом теплообмена
Жидкий корм для телят
Устройство для регулирования давления наддува двигателя внутреннего сгорания

