Результат интеллектуальной деятельности: СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ
Вид РИД
Изобретение
Изобретение относится к области подводной навигации и, в частности, может быть использовано для определения собственных координат на борту автономного необитаемого подводного аппарата (АНПА) при его перемещении подо льдом в высоких арктических широтах.
Задача определения собственных координат АНПА важна для обеспечения в реальном масштабе времени корректировки траектории движения аппарата, а также пространственной привязки результатов обследования на этапе постобработки. Предложенное изобретение позволяет определить выходные навигационные параметры АНПА (координаты) в локальной системе координат (ЛСК) в условиях подледного использования.
Существующие традиционные методы навигации АНПА строятся на базе бортовой системы счисления пути. Для уменьшения накапливающейся со временем ошибки необходимо периодически выполнять процедуру коррекции счисленных координат на основе данных, полученных от других навигационных систем. Среди последних наиболее широкое распространение получили гидроакустические навигационные системы (ГАНС).
Известен способ подледной навигации АНПА, в котором определяют координаты аппарата на его борту путем измерения дальности до гидроакустического маяка (ГМ), географические координаты которого известны, и направления на него, т.е. пеленга и угла места (Арктические подводные операции / Под ред. Л. Рея: Пер с англ. - Л.: Судостроение, 1989. - С.263-264). Способ реализуется в системах, называемых ГАНС с ультракороткой базой (ГАНС-УКБ). Для подледной навигации АНПА ультракороткобазисную систему можно использовать несколькими способами: подвешивать ГМ через прорубь во льду, закреплять на дне, буксировать или размещать на выдвижном устройстве обеспечивающего судна (ОС).
Известен способ подледной навигации, основанный на обработке данных о дальностях АНПА относительно сети из трех или более ГМ с известными географическими и взаимными координатами (Арктические подводные операции / Под ред. Л. Рея: Пер с англ. - Л.: Судостроение, 1989. - С.264-266). Способ реализуется в системах, называемых ГАНС с длинной базой (ГАНС-ДБ), при этом ГМ подвешивают через проруби под кромкой льда или располагают на морском дне.
Применение ультракороткобазисных и дальнобазисных систем ограничивается рядом обстоятельств:
- типовая ошибка определения местоположения большинства современных ГАНС-УКБ составляет 0.2-0.5% от наклонной дальности, т.е. 2-5 м при дистанции в 1 км (IMCA S 017. Guidance on Vessel USBL Systems for Use in Offshore Survey and Positioning Operations. April 2011); при дистанциях более 1 км ГАНС-УКБ не могут обеспечить приемлемую точность;
- для определения пеленга ГАНС-УКБ оснащается магнитным датчиком курса, к показаниям которого в высоких арктических широтах следует относиться критически;
- приемо-передающая антенна ГАНС-ДБ обладает широкой характеристикой направленности (ХН), что необходимо для того, чтобы «накрыть» сигналом все ГМ одновременно; использование антенны с широкой ХН делает систему чувствительной к отраженным ото льда и различных неоднородностей воды эхосигналам;
- постановка в районе работ ГМ может оказаться неэффективной из-за значительного дрейфа ледового поля;
- при обследовании больших площадей возникает необходимость в многократной переустановке системы, что существенно увеличивает время и стоимость выполнения работ.
Известен способ, основанный на использовании спутниковой навигации и модемной гидроакустической связи, которая позволяет синхронно обмениваться пакетами навигационных данных между АНПА и единственным ГМ и одновременно измерять время распространения акустического сигнала между ними (М.В. Larsen. ″Synthetic Long Baseline Navigation of Underwater Vehicles″, presented at Oceans 2000 MTS/IEEE Conference and Exhibition, vol.3, 11-14 September 2000, pages 2043-2050, XP002901743 ISBN: 0-7803-6551-8; патент № EP 1275012 B1 от 15.01.2003, международная публикация № WO 2001/065274 от 07.09.2001).
Наиболее близким к заявленному техническому решению аналогом (прототипом) является способ одномаяковой навигации, реализуемый на основе информации от датчиков бортовой автономной навигационной системы АНПА и дальностей до мобильного ГМ, буксируемого ОС или автономным необитаемым водным (поверхностным) аппаратом (АНВА) (Щербатюк А.Ф., Дубровин Ф.С. Алгоритмы определения местоположения АНПА на основе информации о дальности до одного мобильного гидроакустического маяка // Информационно-измерительные и управляющие системы. - 2012. - №9. - С.26-39). Способ выполняется посредством системы, содержащей АНПА и ГМ, который буксируют за судном по траектории, обеспечивающей минимизацию ошибки оценивания местоположения аппарата, при этом ГМ снабжен первой гидроакустической аппаратурой передачи информации (ГАПИ) с помощью приемоизлучающей антенны которой в объем воды излучают пакет навигационных данных о горизонтальных координатах и глубине движения ГМ в ЛСК, а также метке времени излучения пакета, при этом АНПА снабжен второй ГАПИ, с помощью которой принимают и выделяют навигационный пакет, измеряют временной интервал распространения навигационного пакета между ГМ и АНПА и определяют расстояние между ними, при этом АНПА снабжен датчиком глубины, датчиком курса и доплеровским гидроакустическим лагом (ДГАЛ), с помощью которых измеряют глубину движения аппарата, курс аппарата в ЛСК, а также модуль вектора скорости его движения, при этом АНПА снабжен системой счисления пути, которая на основе данных о скорости движения и курсе АНПА определяет фактическое перемещение аппарата в ЛСК, при этом АНПА снабжен системой коррекции координат, с помощью которой на основе фильтра Калмана по результатам измерения дальностей от АНПА до ГМ, глубинам движения ГМ и АНПА, счисленным перемещениям подводного аппарата оценивают его координаты в ЛСК.
Существенными недостатками данного способа-прототипа являются:
- для определения фактического перемещения АНПА в ЛСК требуется использовать данные от датчика курса, которые в высоких арктических широтах не обеспечивают требуемую точность;
- в условиях ледового покрытия маневренные возможности ОС и буксируемого ГМ существенно ограничены, что снижает точность координирования, не позволяя ГМ находиться в такой позиции, при которой обеспечивается минимизация ошибки оценивания местоположения аппарата.
Отсутствие учета указанных недостатков приводит к появлению значительных ошибок при определении местоположения АНПА в условиях подледного плавания.
Задачей предложенного изобретения является обеспечение проведения подледных исследований в высоких арктических широтах с помощью АНПА путем привязки его местоположения к локальным координатам.
Технический результат заключается в повышении точности позиционирования АНПА за счет исключения из системы датчика курса АНПА, т.е. исключения влияния ошибок его измерений на общую оценку горизонтальных координат аппарата. Предложенное техническое решение позволяет также исключить ограничивающие условия оценки координат аппарата из-за неблагоприятного геометрического (пространственного) расположения ГМ и АНПА.
Для достижения указанного технического результата в известный способ координирования подводного комплекса, выполняемый посредством системы, содержащей АНПА и ГМ, который перемещают за ОС, при этом ГМ снабжен первой ГАПИ с помощью приемоизлучающей антенны, которой в объем воды излучают пакет навигационных данных о горизонтальных координатах и глубине нахождения ГМ в ЛСК 0XYZ, а также метке времени излучения пакета, при этом АНПА снабжен второй ГАПИ, с помощью которой принимают и выделяют навигационный пакет, измеряют временной интервал ΔTk распространения k-го навигационного пакета (k=1, …, N) между ГМ и АНПА и определяют расстояние между ними RАНПА(tk) к моменту времени tk, при этом АНПА снабжен датчиком глубины и ДГАЛ, с помощью которых измеряют глубину движения аппарата ZАНПА(tk) в ЛСК и модуль вектора скорости его движения VАНПА(tk) к моменту времени tk, при этом АНПА снабжен системой коррекции координат, с помощью которой оценивают горизонтальные координаты аппарата (XАНПА(tk); YАНПА(tk)) в ЛСК, введены новые признаки, а именно:
- по завершении процесса заглубления (аппарат достиг требуемой глубины или высоты над дном) с помощью первой ГАПИ на АНПА передают пакет навигационных данных с начальными горизонтальными координатами (XАНПА(t0); YАНПА(t0)) аппарата в ЛСК, где t0 - время начала работы системы коррекции координат,
- к моменту времени излучения k-го навигационного пакета (tk-ΔTk) определяют горизонтальные координаты (XГМ(tk-ΔTk); YГМ(tk-ΔTk)) ГМ в ЛСК, при этом в качестве ГМ используют телеуправляемый необитаемый подводный аппарат (ТНПА), для этого на ТНПА дополнительно размещают гидроакустический маяк-ответчик (ГМО), с помощью которого с заданным периодом зондирования в объем воды излучают акустические импульсы, при этом ОС снабжают аппаратурой ГАНС-УКБ, с помощью которой последовательно принимают акустические импульсы и определяют дистанцию RГМ(tk-ΔTk) от ГМО до фазового центра пеленгационной антенны ГАНС-УКБ и курсовой угол KU(tk-ΔTk) между носовой частью строительной оси судна и направлением на ГМО, при этом ОС снабжают первым и вторым радионавигационным приемником GPS/ГЛОНАСС, приемные антенны которых размещают вдоль строительной оси судна в носовой и кормой части соответственно, при этом многократно определяют географические координаты антенн, которые с помощью вычислительного устройства (ВУ), размещенного на ОС, пересчитывают по каждой паре измерений в локальные координаты с последующим вычислением угла между осью 0X и носовой частью строительной оси судна (курс судна), а затем по группе полученных парциальных оценок курса формируют методом наименьших квадратов сглаженную оценку курса ОС KOC(tk-ΔTk) в ЛСК, далее с учетом линейных смещений фазового центра пеленгационной антенны ГАНС-УКБ относительно второй антенны радионавигационного приемника GPS/ГЛОНАСС в ВУ определяют горизонтальные координаты ОС (XOC(tk-ΔTk); YOC(tk-ΔTk)) в ЛСК и затем горизонтальные координаты ТНПА (XГМ(tk-ΔTk); YГМ(tk-ΔTk)) в ЛСК по формулам
DГМ(tk-ΔTk)=(RГМ(tk-ΔTk)2-ZГМ(tk-ΔTk)2)0.5,
XГМ(tk-ΔTk)=XOC(tk-ΔTk)+DГМ(tk-ΔTk)×cosβ,
YГМ(tk-ΔTk)=YOC(tk-ΔTk)+DГМ(tk-ΔTk)×sinβ,
где DГМ(tk-ΔTk) - расстояние между ГМО и фазовым центром пеленгационной антенны ГАНС-УКБ в плоскости X0Y, ZГМ(tk-ΔTk) - глубина нахождения ТНПА в ЛСК, β=KU(tk-ΔTk)-360+KOC(tk-ΔTk), если
(KOC(tk-ΔTk)+KU(tk-ΔTk))≥360 град, или β=KU(tk-ΔTk)+KOC(tk-ΔTk), если 0 град ≤(KOC(tk-ΔTk)+KU(tk-ΔTk))<360 град,
- а горизонтальные координаты АНПА в ЛСК к моменту времени tk оценивают по результатам решения системы уравнений

где DАНПА(tk)2=RАНПА(tk)2-ZАНПА(tk)2, DАНПА(tk) - расстояние между первой и второй ГАПИ в плоскости X0Y, и выборе окончательного решения на основе сравнения путевых углов K1(tk) и K2(tk) с K(tk-1), при этом первое решение системы является истинным, если выполняется условие
 , в остальных случаях истинным является второе решение, где K1(tk) - путевой угол АНПА, рассчитанный по двум смежным оценкам местоположения аппарата (в моменты времени tk и tk-1 соответственно), в предположении, что первое решение системы уравнений является истинным, K2(tk) - путевой угол АНПА в предположении, что второе решение системы уравнений является истинным, K(tk-1) - путевой угол АНПА в момент времени tk-1 получения k-1-го навигационного пакета.
, в остальных случаях истинным является второе решение, где K1(tk) - путевой угол АНПА, рассчитанный по двум смежным оценкам местоположения аппарата (в моменты времени tk и tk-1 соответственно), в предположении, что первое решение системы уравнений является истинным, K2(tk) - путевой угол АНПА в предположении, что второе решение системы уравнений является истинным, K(tk-1) - путевой угол АНПА в момент времени tk-1 получения k-1-го навигационного пакета.
Покажем возможность достижения указанного технического результата.
Сущность изобретения отображена на чертежах, иллюстрирующих способ координирования АНПА в условиях подледного плавания.
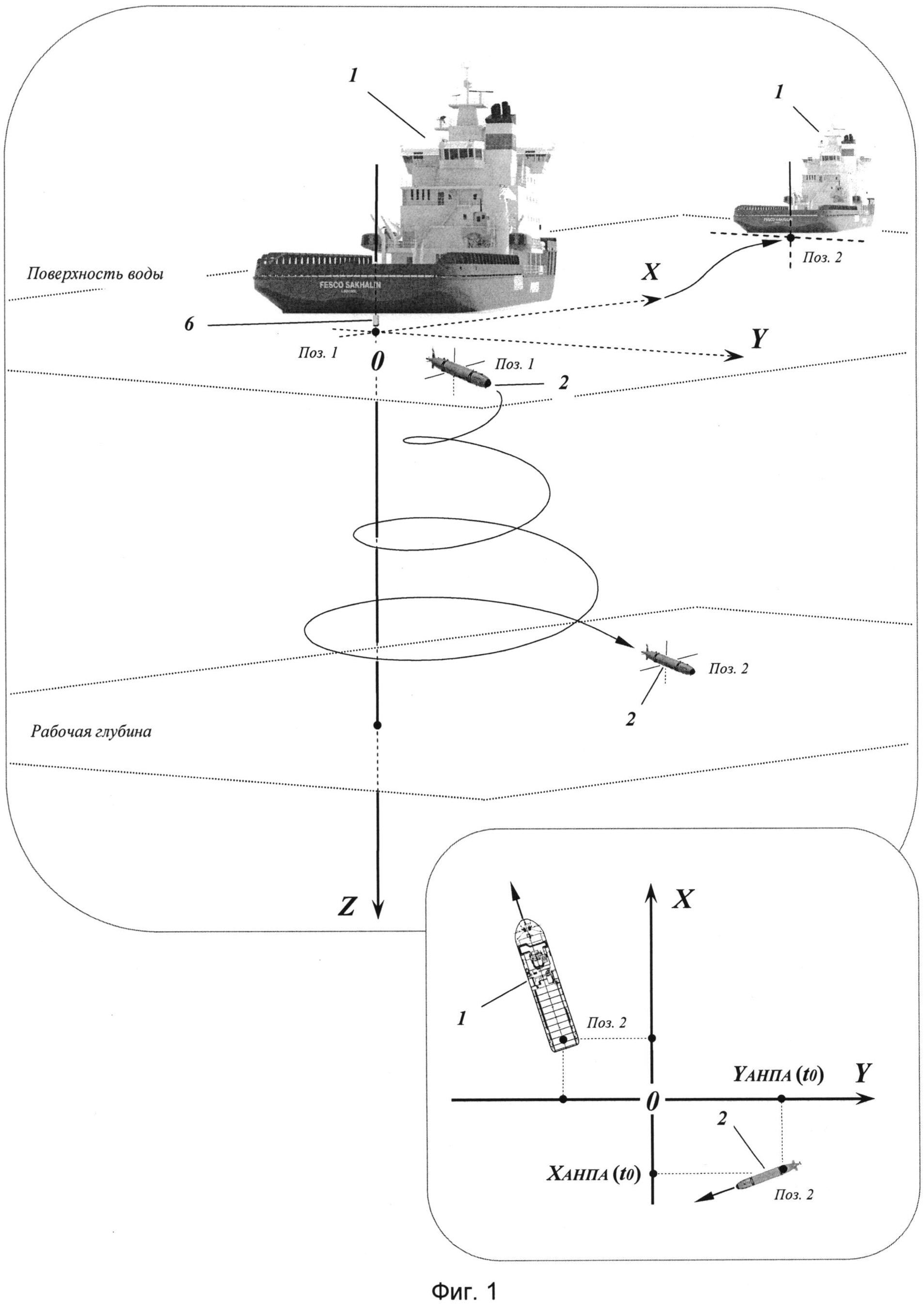
На фиг.1 изображена ЛСК 0XYZ, в которой осуществляется координирование АНПА, а также проекции положений ОС и АНПА на плоскость X0Y по достижении аппаратом требуемой глубины или высоты над дном.
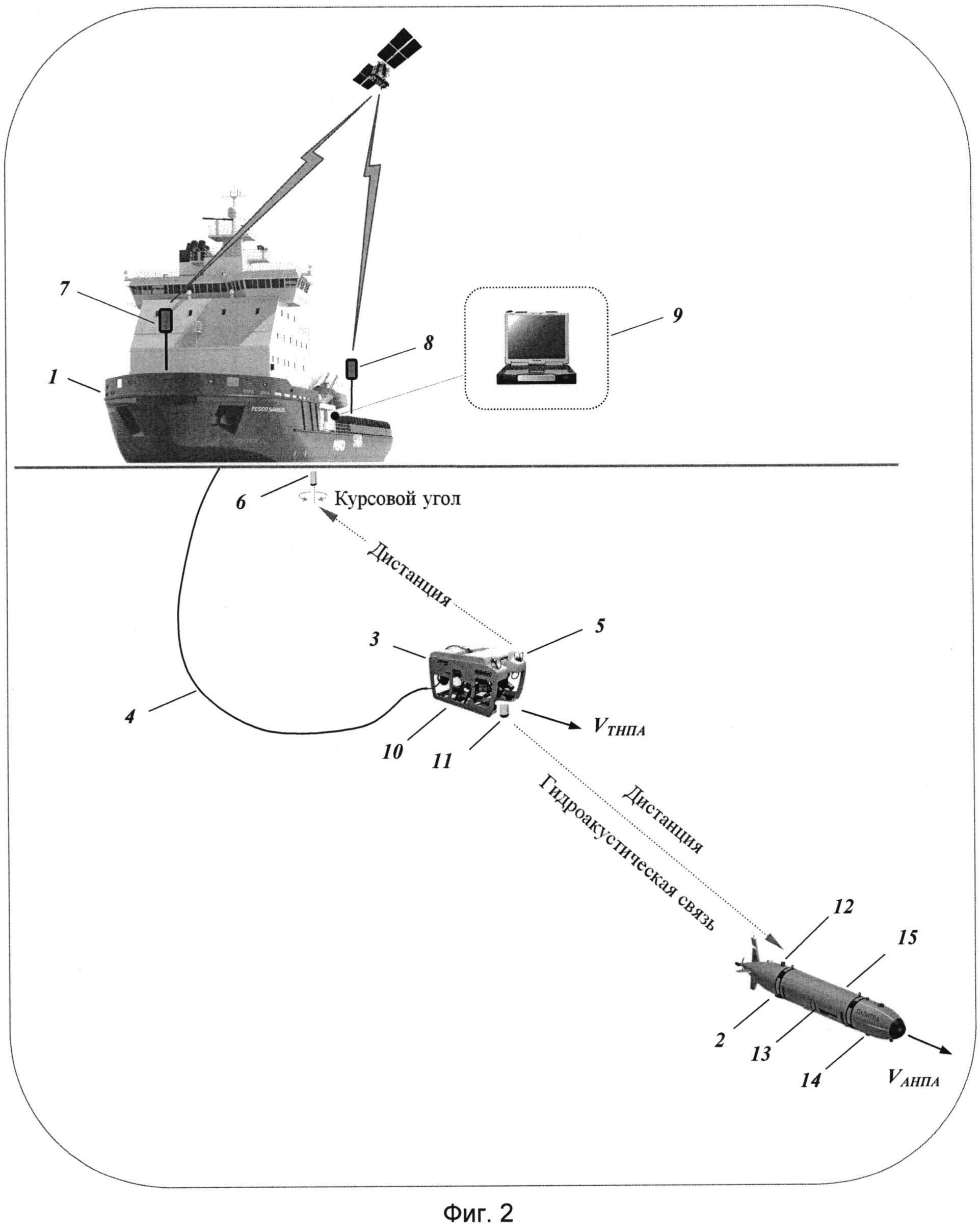
На фиг.2 изображена общая схема способа координирования АНПА в условиях подледного плавания.
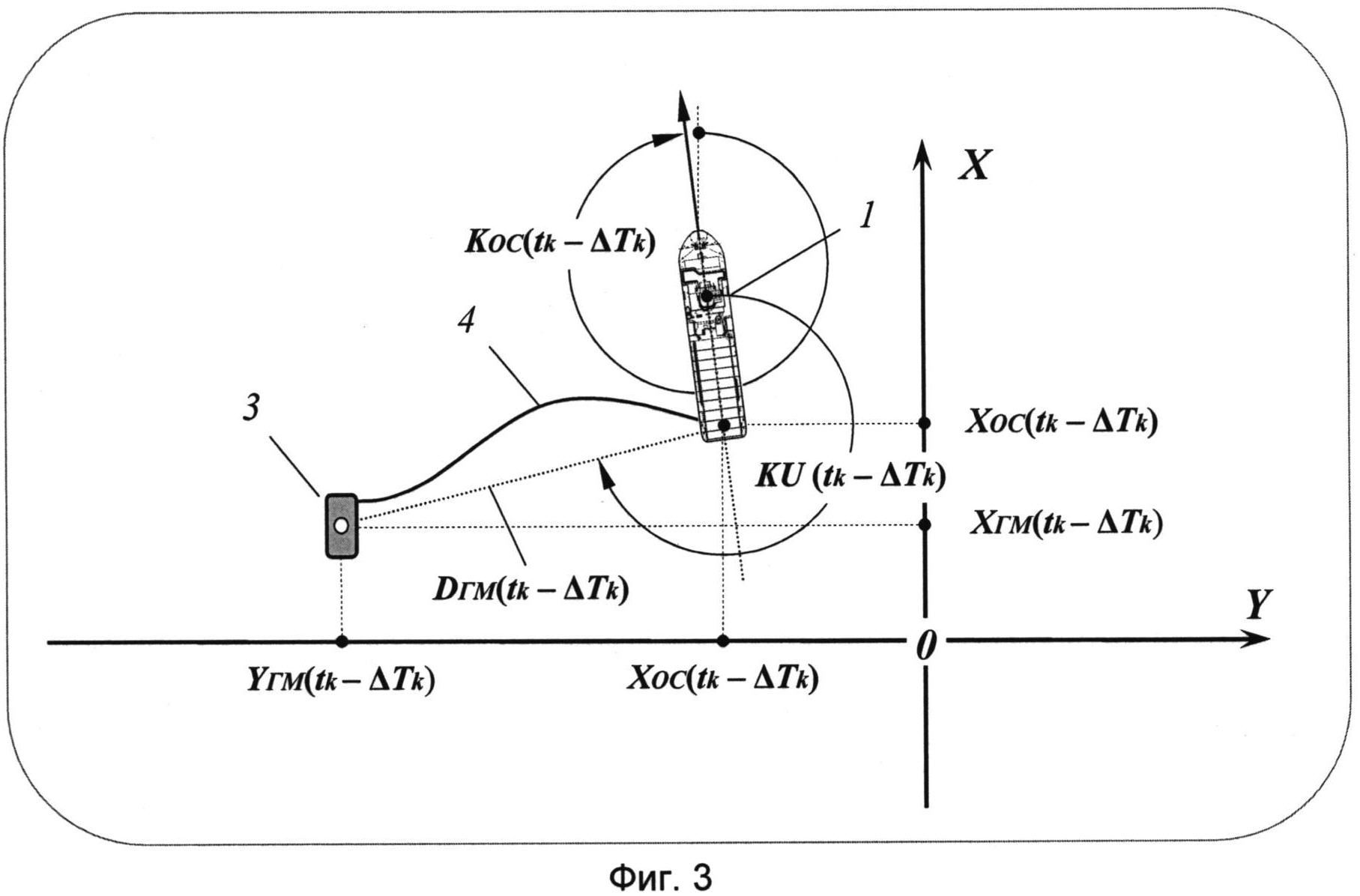
На фиг.3 изображены проекции положений ОС и ТНПА на плоскость X0Y для пояснения формул определения горизонтальных координат ТНПА в момент времени (tk-ΔTk).
Рассмотрим пример реализации способа.
При подходе ОС 1 (фиг.1) в заданный район подледных исследований формируется неподвижная правосторонняя ЛСК 0XYZ, помещенная в фазовый центр пеленгационной антенны ГАНС-УКБ 6 (позиция 1) и ориентированная осью 0X по линии истинного курса ОС 1 на момент начала процесса спиралеобразного заглубления АНПА 2 (позиция 1).
Предполагается, что по окончании процесса заглубления (аппарат достиг требуемой глубины или высоты над дном), координаты (XАНПА(t0); YАНПА(t0)) АНПА 2 (позиция 2) в плоскости X0Y определены с высокой точностью (фиг.1).
ГМО 5 (фиг.2) на ТНПА 3 с заданным периодом зондирования по электрическому сигналу активации, поступающему по кабель-тросу 4 с ОС 1, в объем воды излучает акустический импульс. Этот импульс принимается судовой аппаратурой ГАНС-УКБ 6, где осуществляется определение дистанции от ГМО 5 до фазового центра пеленгационной антенны ГАНС-УКБ 6 и курсового угла между носовой частью строительной оси ОС 1 и направлением на ГМО 5.
С помощью первого 7 и второго 8 радионавигационного приемника GPS/ГЛОНАСС, антенны которых размещены вдоль строительной оси судна в носовой и кормой части соответственно, определяются географические координаты приемных антенн. Полученные координаты поступают в ВУ 9, где осуществляется пересчет каждой пары измерений в локальные координаты с последующим вычислением угла между осью 0X и носовой частью строительной оси судна (курс судна) по формулам:

где a=X2(tm)-X1(tm).

где b=Y2(tm)-Y1(tm);





где (X1(tm); Y1(tm)) и (X2(tm); Y2(tm)) - горизонтальные координаты антенн первого 7 и второго 8 радионавигационного приемника GPS/ГЛОНАСС в ЛСК; m=1, …, M - номер пары координат приемных антенн; KOC(tm) - парциальная оценка курса ОС 1.
Затем по группе полученных парциальных оценок курса в ВУ 9 формируется методом наименьших квадратов сглаженная оценка курса ОС 1 KOC(tk-ΔTk) в момент времени (tk-ΔTk).
Затем с учетом линейных смещений фазового центра пеленгационной антенны ГАНС-УКБ 6 относительно второй антенны радионавигационного приемника GPS/ГЛОНАСС 8 в ВУ 9 определяются горизонтальные координаты ОС 1 (ХOC(tk-ΔTk); YOC(tk-ΔTk)) в ЛСК.
С помощью датчика давления 10, размещенного на ТИПА 3, определяется глубина погружения ТНПА 3 ZГМ(tk-ΔTk) в ЛСК.
Курсовой угол и дистанция от ГМО 5 до пеленгационной антенны ГАНС-УКБ 6, а также глубина погружения ТНПА 3 поступают в ВУ 9, где с учетом горизонтальных координат и сглаженной оценки курса ОС 1 осуществляется определение горизонтальных координат ТНПА 3 в ЛСК к моменту времени (tk-ΔTk) по следующим формулам (фиг.3):



где β=KU(tk-ΔTk)-360+KOC(tk-ΔTk), если
(KOC(tk-ΔTk)+KU(tk-ΔTk))≥360 град, или β=KU(tk-ΔTk)+KOC(tk-ΔTk), если 0 град ≤(KOC(tk-ΔTk)+KU(tk-ΔTk}}<360 град.
В момент времени (tk-ΔTk) первая ГАПИ 11 с помощью приемоизлучающей антенны в объем воды излучает пакет навигационных данных о горизонтальных координатах и глубине нахождения ТНПА 3 в ЛСК, а также метке времени излучения пакета. В момент времени tk вторая ГАПИ 12 принимает навигационный пакет и определяет расстояние между ТНПА 3 и АНПА 2. С помощью датчика глубины 13 и ДГАЛ 14 измеряются глубина движения аппарата в ЛСК и модуль вектора скорости его движения к моменту времени tk.
Глубина движения аппарата, модуль вектора скорости его движения, координаты ТНПА в ЛСК, а также измеренная дальность между ТНПА и АНПА поступают в систему коррекции координат 15, где осуществляется оценка горизонтальных координат аппарата (XАНПА(tk); YАНПА(tk)} в ЛСК по результатам решения системы уравнений:

где DАНПА(tk)2=RАНПА(tk)2-ZАНПА(tk),
и выборе окончательного решения на основе сравнения путевых углов K1(tk) и K2(tk) с K(tk-1), при этом первое решение системы является истинным, если выполняется условие
, в остальных случаях истинным является второе решение, где K1(tk) - путевой угол АНПА, рассчитанный по двум смежным оценкам местоположения аппарата (в моменты времени tk и tk-1 соответственно), в предположении, что первое решение системы уравнений является истинным, K2(tk) - путевой угол АНПА в предположении, что второе решение системы уравнений является истинным, K(tk-1) - путевой угол АНПА в момент времени tk-1 получения k-1-го навигационного пакета.
Разработанный способ координирования подводного комплекса, которым является АНПА, за счет исключения измерений курса аппарата и ОС прямым путем, что является источником некорректных данных в высоких арктических широтах, а также повышение маневренности ГМ, в качестве которого используется ТНПА, позволяет повысить точность позиционирования в условиях подледного плавания.
Таким образом, технический результат изобретения достигнут.
Способ координирования подводного комплекса в условиях подледного плавания, выполняемый посредством системы, содержащей автономный необитаемый подводный аппарат (АНПА) и гидроакустический маяк (ГМ), который перемещают за обеспечивающим судном (ОС), при этом ГМ снабжен первой гидроакустической аппаратурой передачи информации (ГАПИ) с помощью приемоизлучающей антенны которой в объем воды излучают пакет навигационных данных о горизонтальных координатах и глубине нахождения ГМ в локальной системе координат (ЛСК) 0XYZ, а также метке времени излучения пакета, при этом АНПА снабжен второй ГАПИ, с помощью которой принимают и выделяют навигационный пакет, измеряют временной интервал ΔT распространения k-го навигационного пакета (k=1, …, N) между ГМ и АНПА и определяют расстояние между ними R(t) к моменту времени t, при этом АНПА снабжен датчиком глубины и доплеровским гидроакустическим лагом, с помощью которых измеряют глубину движения аппарата Z(t) в ЛСК и модуль вектора скорости его движения V(t) к моменту времени t, при этом АНПА снабжен системой коррекции координат, с помощью которой оценивают горизонтальные координаты аппарата (X(t); Y(t)) в ЛСК, отличающийся тем, что по завершении процесса заглубления (аппарат достиг требуемой глубины или высоты над дном) с помощью первой ГАПИ на АНПА передают пакет навигационных данных с начальными горизонтальными координатами (X(t); Y(t)) аппарата в ЛСК, где t - время начала работы системы коррекции координат, к моменту времени излучения k-го навигационного пакета (t-ΔT) определяют горизонтальные координаты (X(t-ΔT); Y(t-ΔT)) ГМ в ЛСК, при этом в качестве ГМ используют телеуправляемый необитаемый подводный аппарат (ТНПА), для этого на ТНПА дополнительно размещают гидроакустический маяк-ответчик (ГМО), с помощью которого с заданным периодом зондирования в объем воды излучают акустические импульсы, при этом ОС снабжают аппаратурой гидроакустической навигационной системой с ультракороткой базой (ГАНС-УКБ), с помощью которой последовательно принимают акустические импульсы и определяют дистанцию R(t-ΔT) от ГМО до фазового центра пеленгационной антенны ГАНС-УКБ и курсовой угол KU(t-ΔT) между носовой частью строительной оси судна и направлением на ГМО, при этом ОС снабжают первым и вторым радионавигационным приемником GPS/ГЛОНАСС, приемные антенны которых размещают вдоль строительной оси судна в носовой и кормой части соответственно, при этом многократно определяют географические координаты антенн, которые с помощью вычислительного устройства (ВУ), размещенного на ОС, пересчитывают по каждой паре измерений в локальные координаты с последующим вычислением угла между осью 0X и носовой частью строительной оси судна (курс судна), а затем по группе полученных парциальных оценок курса формируют методом наименьших квадратов сглаженную оценку курса ОС K(t-ΔT) в ЛСК, далее с учетом линейных смещений фазового центра пеленгационной антенны ГАНС-УКБ относительно второй антенны радионавигационного приемника GPS/ГЛОНАСС в ВУ определяют горизонтальные координаты ОС (X(t-ΔT); Y(t-ΔT)) в ЛСК и затем горизонтальные координаты ТНПА (X(t-ΔT); Y(t-ΔT)) в ЛСК по формулам D(t-ΔT)=(R(t-ΔT)-Z(t-ΔT)), X(t-ΔT)=X(t-ΔT)+D(t-ΔT)×cosβ, Y(t-ΔT)=Y(t-ΔT)+D(t-ΔT)×sinβ,где D(t-ΔT) - дальность между ГМО и фазовым центром пеленгационной антенны ГАНС-УКБ в плоскости X0Y, Z(t-ΔT) - глубина нахождения ТНПА в ЛСК, β=KU(t-ΔT)-360+K(t-ΔT), если(K(t-ΔT)+KU(t-ΔT))≥360 град, или β=KU(t-ΔT)+K(t-ΔT), если 0 град ≤(K(t-ΔT)+KU(t-ΔT))<360 град, а горизонтальные координаты АНПА в ЛСК к моменту времени t оценивают по результатам решения системы уравнений гдегде D(t)=R(t)-Z(t), D(t) - расстояние между первой и второй ГАПИ в плоскости X0Y, и выборе окончательного решения на основе сравнения путевых углов K(t) и K(t) с K(t), при этом первое решение системы является истинным, если выполняется условие , в остальных случаях истинным является второе решение, где K(t) - путевой угол АНПА, рассчитанный по двум смежным оценкам местоположения аппарата (в моменты времени t и t соответственно), в предположении, что первое решение системы уравнений является истинным, K(t) - путевой угол АНПА в предположении, что второе решение системы уравнений является истинным, K(t) - путевой угол АНПА в момент времени t получения k-1-го навигационного пакета.

Способ и устройство для определения положения подводного трубопровода
Способ послеоперационного прогнозирования пострезекционной печеночной недостаточности
Способ предоперационного прогнозирования пострезекционной печеночной недостаточности
Способ прогнозирования пострезекционной печеночной недостаточности в раннем послеоперационном периоде
Гидроакустическая система подводной навигации
Способ прогнозирования общей выживаемости у больных опухолью клатскина после хирургического лечения
Способ дооперационного определения вероятности наличия карциноматоза брюшины у больных воротной холангиокарциномой
Способ и устройство определения начальных координат автономного необитаемого подводного аппарата
Способ паренхимосохраняющей правосторонней расширенной гемигепатэктомии
Способ определения выживаемости у больных воротной холангиокарциномой
Способ определения выживаемости у больных опухолями проксимальных желчных протоков в предоперационном периоде
Ускоритель плазмы
Система определения координат буксируемого комплекса
Способ определения географических координат подводного объекта
Способ паренхимосохраняющей левосторонней гемигепатэктомии
Датчик погружения антенны гидроакустического средства

