Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть применено для определения планово-высотного положения подводного трубопровода, находящегося на дне над слоем грунта или на грунте.
Задача определения точного положения подводного трубопровода важна для обеспечения его безопасной эксплуатации и продления срока службы.
Известно устройство, а также способ определения положения подводного трубопровода, состоящий в излучении акустических сигналов панорамным эхолокатором, приеме эхосигналов обратного рассеяния от отражателей, установленных на трубопроводе друг от друга на расстояниях, на которых прогиб трубопровода не должен превышать заданной величины, и расчете координат озвученных отражателей (патент РФ №27670 U1, МПК F17D 1/00, 2002 г.). Недостатком данного решения-аналога является необходимое требование установки на подводный трубопровод отражателей, расположенных относительно друг друга на заданных расстояниях, что требует проведения дополнительных работ, непосредственно предшествующих определению положения подводного трубопровода.
Также известны способ и устройство определения трассы прокладки подводного трубопровода, основанные на измерении параметров вторичных электромагнитных полей, которые создаются токами, наведенными в трубопроводе дипольным источником излучения (патент РФ №2211464 С1, МПК G01V 3/08, G01V 3/165, 2002 г.). Данное решение-аналог обладает существенным недостатком: он пригоден лишь в частном случае, а именно только для моментов прохождения подводного носителя непосредственно над трубопроводом.
Наиболее близким аналогом по технической сущности к предлагаемому способу является способ вычисления высотного положения подводного трубопровода относительно линии дна и его планового положения в мировой геодезической системе координат с использованием гидролокатора бокового обзора (Фирсов Ю.Г. Основы гидроакустики и использования гидрографических сонаров. - СПб.: Нестор-История, 2010. - с.293). Способ основан на том, что с помощью приемопередающей антенны гидролокатора бокового обзора (ГБО), установленного на подводном носителе, в объем воды излучают акустические импульсы с заданным периодом зондирования, и последовательно принимают эхосигналы обратного рассеяния от элементарных участков дна и оголенного участка трубопровода, измеряют времена распространения эхосигналов и вычисляют наклонные дальности до каждого озвученного участка, определяют границы зоны акустической тени от оголенного участка трубопровода, по данным промерного эхолота с учетом предварительно измеренного линейного смещения начал «приборной» и «судовой» систем координат определяют отстояние антенны ГБО от дна, и затем определяют высотное положение трубопровода относительно линии дна путем деления произведения длины акустической тени от трубопровода на отстояние антенны ГБО от дна на величину наклонной дальности до конца тени, затем, проектируя наклонную дальность до точки трубопровода, определяющего высотное положение трубопровода на плоскость дна, определяют горизонтальную дальность до трубопровода в «приборной» системе координат, а затем с учетом линейного смещения начал «приборной» и «судовой» систем координат, координат подводного носителя и его курса в мировой геодезической системе, измеренных навигационными средствами подводного носителя, определяют плановое положение озвученного участка подводного трубопровода в мировой геодезической системе координат.
Существенными недостатками данного способа-прототипа являются:
- допущение, что начало зоны акустической тени от оголенного участка трубопровода совпадает с вершиной трубопровода, что на самом деле не соответствует действительности;
- отсутствует учет положения трубопровода относительно линии дна.
Так при обследовании оголенного участка трубопровода акустический луч, определяющий границы зоны акустической тени, проходит по касательной к сечению трубопровода. Начало зоны акустической тени не совпадает с вершиной трубопровода, а лежит в точке касания акустического луча с сечением трубопровода. При обследовании провисающего участка трубопровода начало зоны акустической тени лежит не в точке касания акустического луча с сечением трубопровода, а в точке падения луча на линию дна.
К недостаткам данного способа-прототипа также относятся:
- отсутствует корректировка наклонных дальностей до каждого озвученного участка и границы зоны акустической тени от оголенного участка трубопровода по предварительно построенному вертикальному профилю скорости звука в воде;
- при определении горизонтальной дальности до трубопровода в «приборной» системе координат используют высотное положение трубопровода относительно линии дна, определение которого обладает недостатками, описанными выше;
- при определении планового положения трубопровода в мировой геодезической системе координат отсутствует учет углового рассогласования «приборной» и «судовой» систем координат и задержки между выдачей навигационных данных и приемом отраженных от дна сигналов;
- при определении планового положения трубопровода в мировой геодезической системе координат отсутствует учет ориентации подводного носителя, определяемой углами крена и дифферента.
Отсутствие учета данных явлений дает большую погрешность при определении высотного положения трубопровода относительно линии дна и планового положения трубопровода в мировой геодезической системе координат.
Наиболее близким аналогом к предлагаемому устройству является ГБО «Tritech SeaKing ROV/AUV DST» (адрес сайта в Интернете http://www.tritech.co.uk/). Указанный ГБО размещен на подводном носителе, содержит две приемоизлучающие антенны и приемопередающий блок, включающий генераторное устройство (ГУ), аппаратуру предварительной обработки (АПО) эхосигналов, модуль цифровой обработки сигнала (ЦОС), блок питания (БП), при этом выводы от антенн соединены с АПО эхосигналов, при этом БП имеет разъем для получения напряжения питания с борта подводного носителя, а модуль ЦОС разъем для двустороннего обмена данными с вычислительным комплексом (ВК) подводного носителя, по которому в модуль ЦОС передаются начальные параметры работы аппаратуры ГБО, а обратно в ВК подводного носителя передаются гидроакустические данные и диагностическая информация о текущем состоянии ГБО для последующей их обработки, при этом первый, второй и третий выходы БП соединены с входами АПО эхосигналов, ГУ и модуля ЦОС соответственно, выход ГУ соединен с входом АПО эхосигналов, при этом ГУ имеет двустороннюю связь с модулем ЦОС, который в свою очередь имеет двустороннюю связь с АПО эхосигналов, при этом выход модуля ЦОС соединен с входом БП.
Устройство-прототип обладает следующими недостатками:
- отсутствует устройство накопления и хранения первичной гидроакустической информации и диагностической информации о текущем состоянии аппаратуры ГБО, а также данных, поступающих от навигационных устройств подводного носителя, необходимых для определения высотного положения трубопровода относительно линии дна, и планового положения трубопровода в мировой геодезической системе координат.
Задачей изобретения является повышение точности определения высотного и планового положения подводного трубопровода. Технический результат заключается в учете геометрии сечения озвученного участка трубопровода, положения трубопровода относительно линии дна, корректировке наклонных дальностей и границ зоны акустической тени по предварительно построенному профилю скорости звука в воде, учете систематических ошибок по углам дифферента, рыскания, крена и ошибки задержки между выдачей навигационных данных и приемом отраженных от дна эхосигналов, ориентации подводного носителя, определяемой углами крена и дифферента, что обеспечивает точное измерение высотного положения трубопровода относительно линии дна и положения трубопровода в мировой геодезической системе координат.
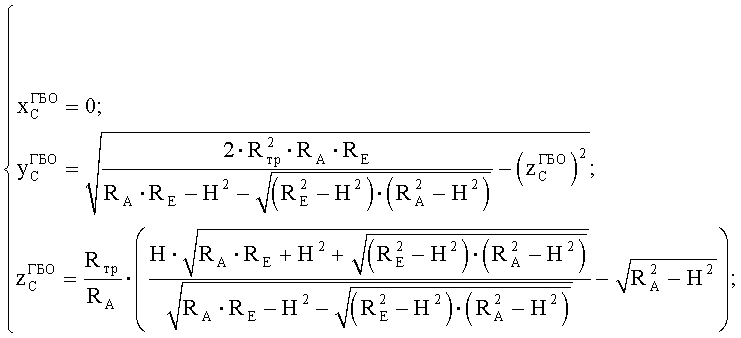
Для обеспечения указанного технического результата в способ определения положения подводного трубопровода, при котором с помощью приемопередающей антенны ГБО, установленного на подводном носителе, в объем воды излучают акустические импульсы с заданным периодом зондирования, и последовательно принимают эхосигналы обратного рассеяния от элементарных участков дна и оголенного участка трубопровода, измеряют времена распространения эхосигналов и вычисляют наклонные дальности до каждого озвученного участка, определяют границы зоны акустической тени от оголенного участка трубопровода, по данным промерного эхолота с учетом предварительно измеренного линейного смещения начал «приборной» и «судовой» систем координат определяют отстояние антенны ГБО от дна. В известный способ введены новые признаки, а именно: предварительно на специально оборудованном полигоне производят калибровку ГБО, определяя постоянные систематические ошибки по углу дифферента α, углу рыскания γ, углу крена θ и ошибки задержки между выдачей навигационных данных и приемом отраженных от дна эхосигналов, выйдя в рабочий район акватории, производят замер распределения скорости звука в воде, по которому корректируют наклонные дальности до каждого озвученного участка и границы зоны акустической тени от оголенного участка трубопровода, а во время съемки осуществляют запись координат положения и углов ориентации подводного носителя (угла дифферента β, угла курса φ, угла крена η) в мировой геодезической системе координат WGS-84, а координаты  ,
,  ,
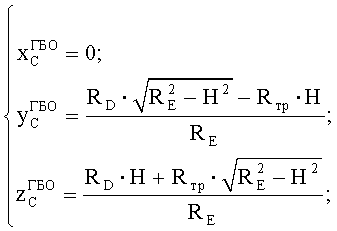
,  оси озвученного участка оголенного трубопровода в «приборной» системе координат и его высотное положение den относительно линии дна рассчитывают по формулам
оси озвученного участка оголенного трубопровода в «приборной» системе координат и его высотное положение den относительно линии дна рассчитывают по формулам
 где RE, RD - наклонные дальности до точек конца и начала зоны акустической тени соответственно, Rтр - внешний радиус трубы, H - отстояние антенны ГБО от дна, а координаты , , оси озвученного участка провисающего трубопровода в «приборной» системе координат и его высотное положение sag относительно линии дна рассчитывают по формулам
где RE, RD - наклонные дальности до точек конца и начала зоны акустической тени соответственно, Rтр - внешний радиус трубы, H - отстояние антенны ГБО от дна, а координаты , , оси озвученного участка провисающего трубопровода в «приборной» системе координат и его высотное положение sag относительно линии дна рассчитывают по формулам
 где RE, RA - наклонные дальности до точек конца и начала зоны акустической тени соответственно, а координаты озвученного участка подводного трубопровода в «судовой» системе координат с учетом линейного смещения начал «приборной» и «судовой» систем координат и с учетом постоянных систематических ошибок по углу дифферента α, углу рыскания γ, углу крена θ и ошибок задержки между выдачей навигационных данных и приемом отраженных от дна эхосигналов определяют на основе пространственных преобразований составляющих векторов, а затем с учетом координат положения и углов ориентации подводного носителя (угла дифферента β, угла курса φ, угла крена η) в системе координат WGS-84, а также положения оси озвученного участка подводного трубопровода в «судовой» системе координат на основе пространственных преобразований составляющих векторов определяют положение оси подводного трубопровода в мировой геодезической системе координат WGS-84.
где RE, RA - наклонные дальности до точек конца и начала зоны акустической тени соответственно, а координаты озвученного участка подводного трубопровода в «судовой» системе координат с учетом линейного смещения начал «приборной» и «судовой» систем координат и с учетом постоянных систематических ошибок по углу дифферента α, углу рыскания γ, углу крена θ и ошибок задержки между выдачей навигационных данных и приемом отраженных от дна эхосигналов определяют на основе пространственных преобразований составляющих векторов, а затем с учетом координат положения и углов ориентации подводного носителя (угла дифферента β, угла курса φ, угла крена η) в системе координат WGS-84, а также положения оси озвученного участка подводного трубопровода в «судовой» системе координат на основе пространственных преобразований составляющих векторов определяют положение оси подводного трубопровода в мировой геодезической системе координат WGS-84.
Для достижения указанного технического результата в устройство определения положения подводного трубопровода, размещенное на подводном носителе, содержащее две приемоизлучающие антенны и приемопередающий блок, включающий ГУ, АПО эхосигналов, модуль ЦОС, БП, при этом выводы от антенн соединены с АПО эхосигналов, при этом БП имеет разъем для получения напряжения питания с борта подводного носителя, а модуль ЦОС разъем для двустороннего обмена данными с ВК подводного носителя, по которому в модуль ЦОС передаются начальные параметры работы аппаратуры ГБО, а обратно в ВК подводного носителя передаются гидроакустические данные и диагностическая информация о текущем состоянии ГБО для последующей их обработки, при этом первый, второй и третий выходы БП соединены с входами АПО эхосигналов, ГУ и модуля ЦОС соответственно, выход ГУ соединен с входом АПО эхосигналов, при этом ГУ имеет двустороннюю связь с модулем ЦОС, который в свою очередь имеет двустороннюю связь с АПО эхосигналов, при этом выход модуля ЦОС соединен с входом БП. В устройство введены следующие новые признаки: в приемопередающий блок включено устройство накопления и хранения первичной гидроакустической информации и диагностической информации о текущем состоянии аппаратуры ГБО, а также данных, поступающих от навигационных устройств подводного носителя, выход которого соединен с модулем ЦОС.
Покажем возможность достижения указанного технического результата.
В качестве подводного носителя используется автономный необитаемый подводный аппарат (АНПА). При движении АНПА - носителя ГБО - вдоль трубопровода происходит последовательное озвучивание участков поверхности дна и оголенного трубопровода акустическими импульсами малой длительности и прием отраженных от них сигналов.
Если размеры озвученного участка поверхности трубы превышают разрешение ГБО по наклонной дальности, то за ним образуется зона акустической тени. В результате на гидролокационном изображении вслед за «яркой» отметкой от трубопровода получается изображение его тени в виде зоны с пониженной интенсивностью.
Анализируя изображение акустической тени можно определить координаты озвученного участка трубы и оценить величину оголения и провисания (высотное положение трубопровода относительно линии дна). Рассмотрим две возможные ситуации:
- гидролокационная съемка оголенного участка трубопровода;
- гидролокационная съемка провисающего участка трубопровода.
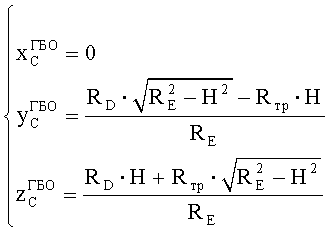
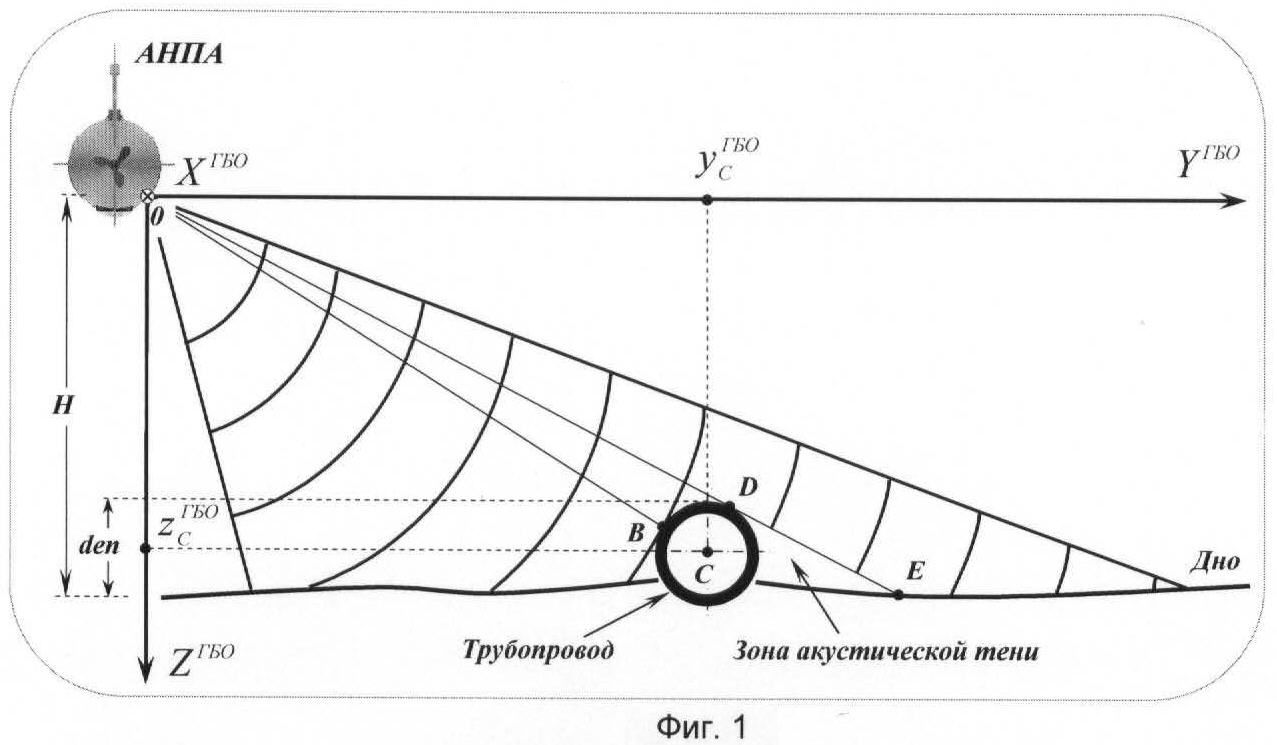
Графическое изображение первой ситуации представлено на фиг.1. Начало правосторонней «приборной» системы координат (системы координат антенны ГБО) XГБОYГБОZГБО расположено в фазовом центре антенны (точка 0). Ось XГБО лежит в активной плоскости приемоизлучающей поверхности антенны. Плоскость YГБО0ZГБО проходит через сечение характеристики направленности (ХН) в вертикальной плоскости по направлению главного максимума. Вследствие того, что ширина ХН ГБО в горизонтальной плоскости составляет 0.5-2 град, будем рассматривать двумерную задачу оценки размеров зоны акустической тени. Зафиксируем координату  и примем ее равной нулю.
и примем ее равной нулю.
Наибольший интерес представляют точки: В - точка первого касания трубопровода фронтом волны; D и E - границы зоны акустической тени. При условии ровного дна, выделив указанные точки, например, с помощью методов пороговой обработки, можно определить координаты трубопровода в системе координат антенны ГБО

где RE, RD - наклонные дальности до точек Е и D соответственно, м;
Rтp - внешний радиус трубы, м;
Н - отстояние антенны ГБО от дна, м.
Величина оголения (высотное положение оголенного участка трубы относительно линии дна) определяется по формуле

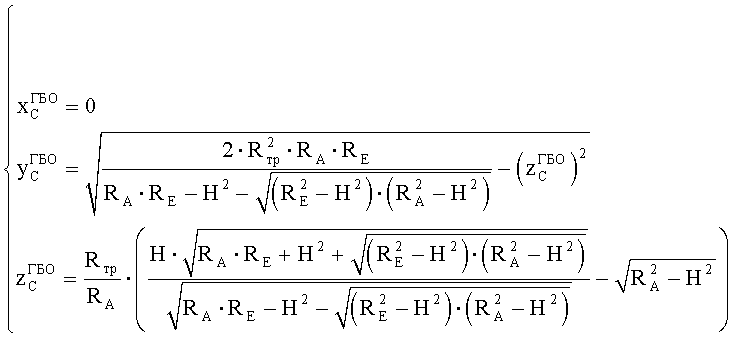
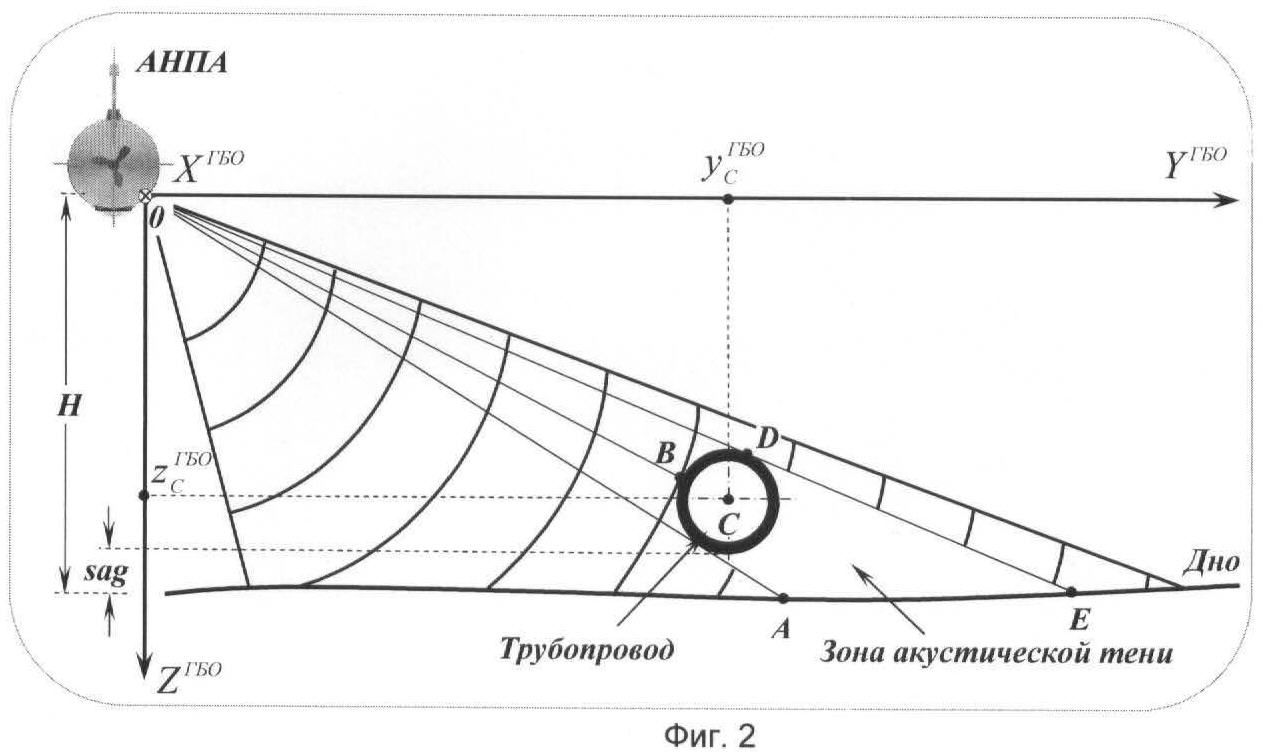
Графическое изображение второй ситуации представлено на фиг.2. При этом должно выполняться условие 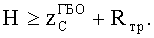 Теперь точка А характеризует начало зоны акустической тени.
Теперь точка А характеризует начало зоны акустической тени.
Тогда при условии ровного дна координаты трубопровода в системе координат антенны ГБО определяются из выражений
где RA - наклонная дальность до точки А, м.
Величина провисания (высотное положение провисающего участка трубы относительно линии дна) определяется по формуле

Выражения (1)-(4) позволяют автоматически вычислять координаты озвученного участка трубопровода в «приборной» системе координат, а также величину оголения и провисания.
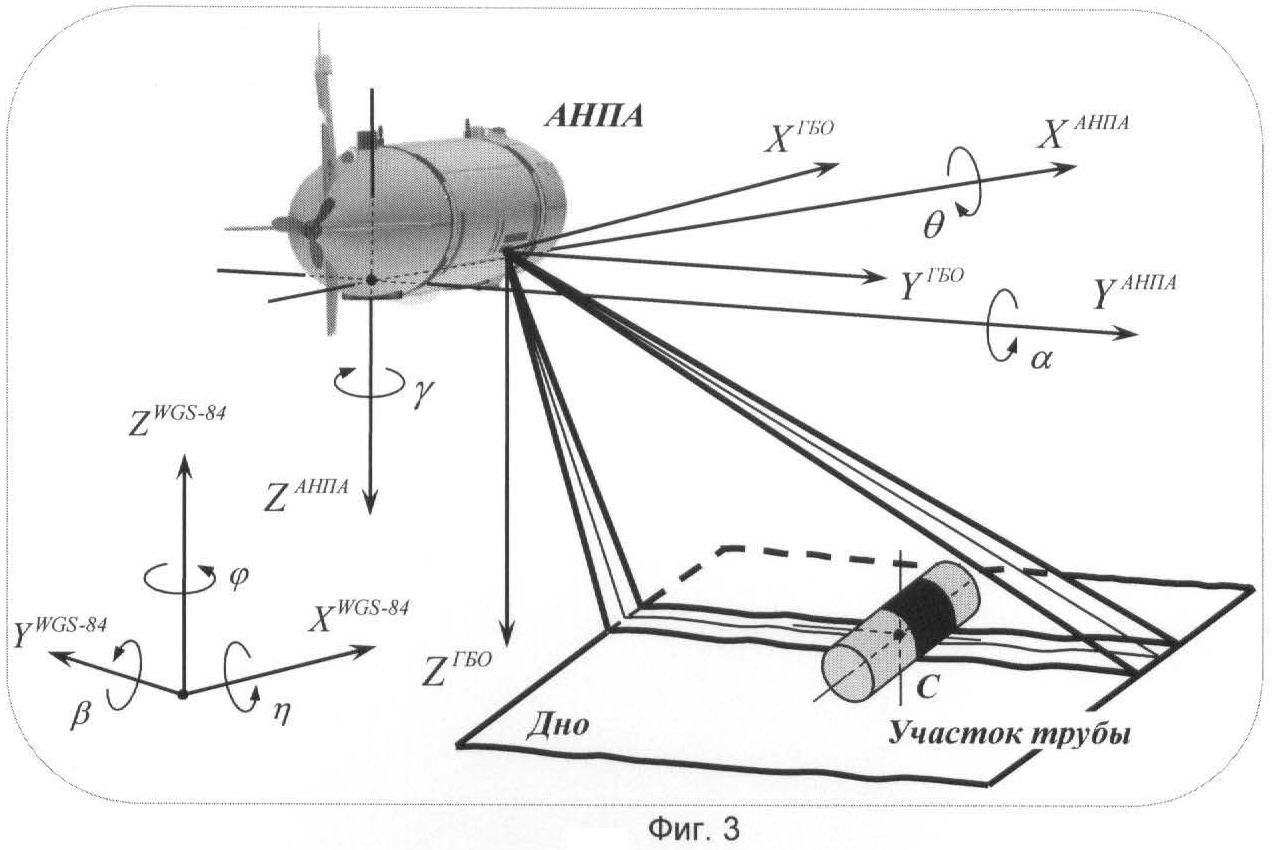
Для определения координат озвученного участка трубы в мировой геодезической системе координат WGS-84 XWGS-84YWGS-84ZWGS-84 необходимо знать положение и ориентацию аппарата в этой системе, а также рассогласование (линейное и угловое) «приборной» и «судовой» систем координат (фиг.3). Центр правосторонней «судовой» системы координат (системы координат аппарата) XАНПАYАНПАZАНПА поместим в точку установки инерциальной навигационной системы (ИНС). Ось ХАНПА лежит в плоскости батокса (с положительным направлением в нос), ось YАНПА - в плоскости теоретической ватерлинии (с положительным направлением на правый борт).
До проведения съемки определяют координаты начала «приборной» системы координат в системе координат аппарата. Затем проводят калибровку, целью которой является определение постоянных систематических ошибок по четырем параметрам: угловое рассогласование «приборной» и «судовой» систем координат (ошибки угла дифферента α, рыскания γ и крена θ) и запаздывание (задержка между выдачей навигационных данных и приемом отраженных от дна сигналов). Калибровка ГБО представляет собой выполнение специальной съемки на подготовленном полигоне в особых наиболее благоприятных внешних условиях.
После определения линейного смещения начал «приборной» и «судовой» систем координат и расчета поправок, координаты озвученного участка трубы в системе координат АНПА определяются с помощью пространственных преобразований

где  - координаты трубопровода в системе координат антенны ГБО, определяемые из выражений (1), (3);
- координаты трубопровода в системе координат антенны ГБО, определяемые из выражений (1), (3);
[T] - обобщенная матрица пространственных преобразований.
Матрицу преобразований [T] можно представить в виде последовательности переносов и поворотов

где [Ti] являются комбинацией матриц линейного перемещения (учет линейного смещения начал «приборной» и «судовой» систем координат), переноса (коррекция запаздывания), вращения вокруг оси YАНПА (поправка на угол α), вращения вокруг оси zАНПА (поправка на угол γ), вращения вокруг оси XАНПА (поправка на угол θ).
Матрица линейного перемещения имеет вид (Д.Роджерс, Дж.Адамс. Математические основы машинной графики. Москва, «Мир» 2001. - c.128.)
где элементы l, m и n являются координатами центра «приборной» системы координат в системе координат аппарата в направлениях ХАНПА, YАНПА, ZАНПА соответственно.
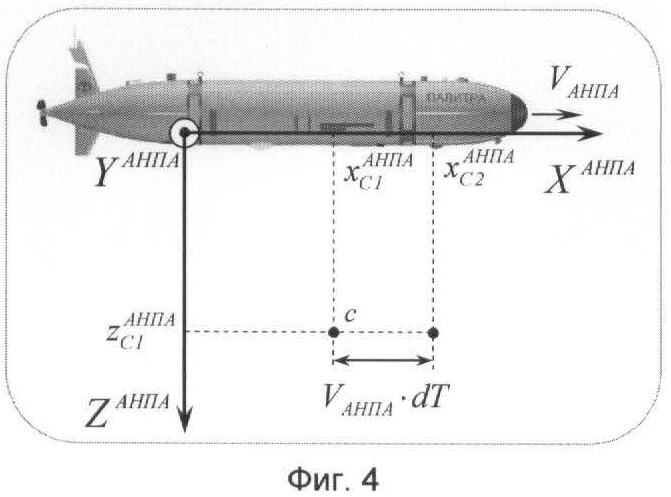
Матрица преобразования, учитывающая коррекцию координат трубопровода по запаздыванию, описывается выражением (фиг.4)
где VАНПА - скорость движения АНПА при калибровке, м/с;
dT - поправка на запаздывание, с;
 - координаты точки С после учета линейного смещения;
- координаты точки С после учета линейного смещения;
 - координаты точки С после учета поправки на запаздывания.
- координаты точки С после учета поправки на запаздывания.
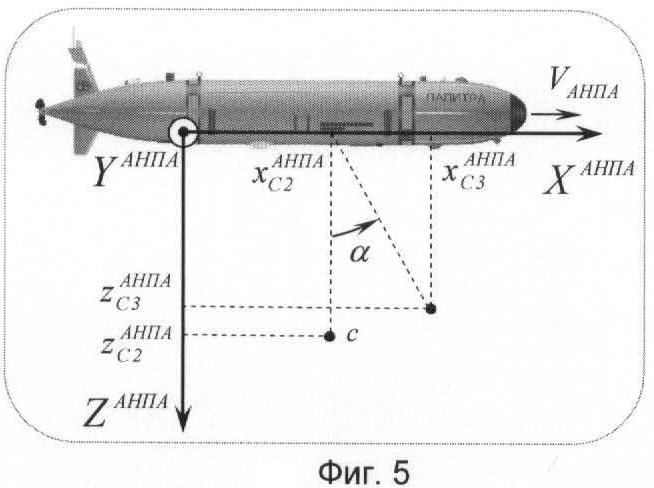
Матрица преобразования, учитывающая ошибку угла дифферента, описывается выражением (фиг.5)
где α - ошибка угла дифферента, град;
 - координаты точки С после учета ошибки угла дифферента.
- координаты точки С после учета ошибки угла дифферента.
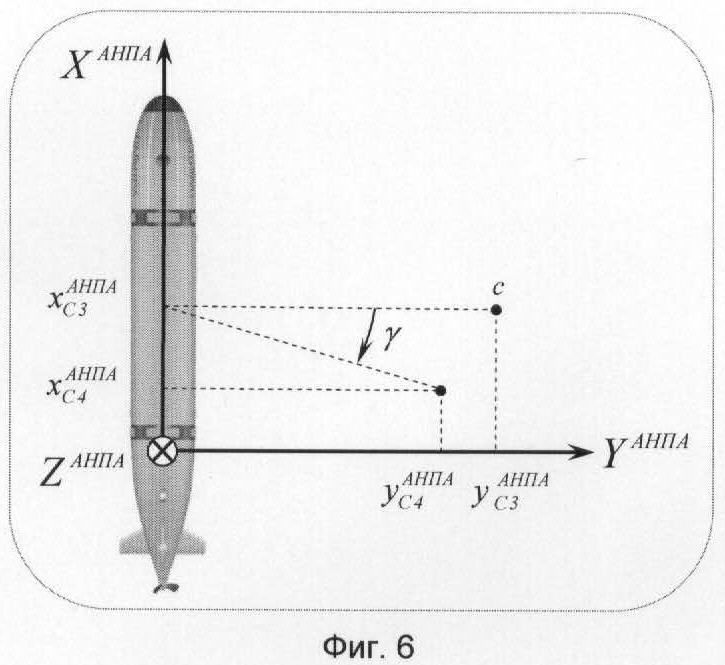
Матрица преобразования, учитывающая ошибку угла рыскания, описывается выражением (фиг.6)
где γ - ошибка угла рыскания, град;
 - координаты точки С после учета ошибки угла рыскания.
- координаты точки С после учета ошибки угла рыскания.
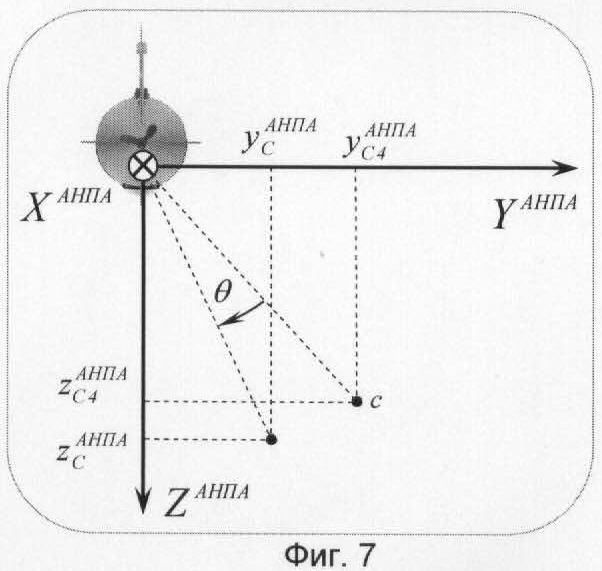
Матрица преобразования, учитывающая ошибку угла крена (фиг.7)
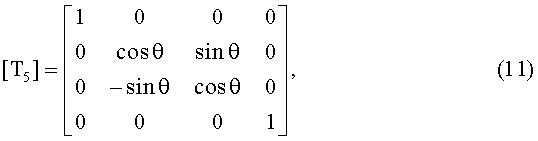
где γ - ошибка угла крена, град;
 - координаты точки С после учета ошибки угла крена.
- координаты точки С после учета ошибки угла крена.
Координаты озвученного участка трубопровода в системе координат WGS-84 определяются из следующего выражения:

где [P] - обобщенная матрица пространственных преобразований.
При отслеживании трубопровода траектория движения аппарата и его ориентация, определяемая углами курса, крена и дифферента, меняются в зависимости от внешних условий (течения, волновые нагрузки, препятствия по курсу движения АНПА). Тогда матрицу преобразований [P] можно представить в виде последовательности переносов и поворотов

где [Pi] являются комбинацией матриц пространственного переноса (координаты АНПА в системе координат WGS-84), вращения вокруг оси YППМТ (поправка на дифферент АНПА), вращения вокруг оси ZППМТ (поправка на курс АНПА), вращения вокруг оси ХППМТ (поправка на крен АНПА).
Матрица пространственного переноса описывается выражением (7), где элементы l, m и n уже являются координатами аппарата в системе координат WGS-84 в направлениях XWGS-84, YWGS-84, ZWGS-84 соответственно.
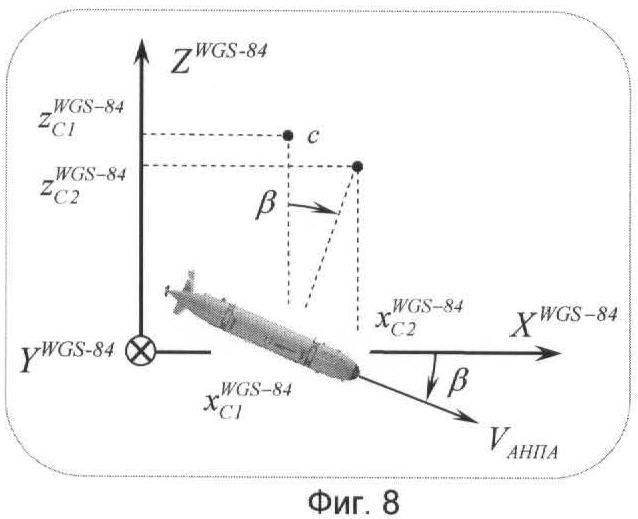
Матрица преобразования, учитывающая дифферент АНПА, описывается выражением (фиг.8)
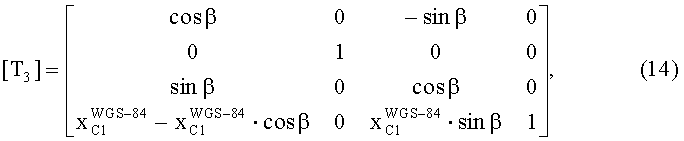
где β - дифферент АНПА, град;
 - координаты точки С после учета линейного смещения начал «судовой» и мировой геодезической систем координат;
- координаты точки С после учета линейного смещения начал «судовой» и мировой геодезической систем координат;
 - координаты точки С после учета дифферента АНПА.
- координаты точки С после учета дифферента АНПА.
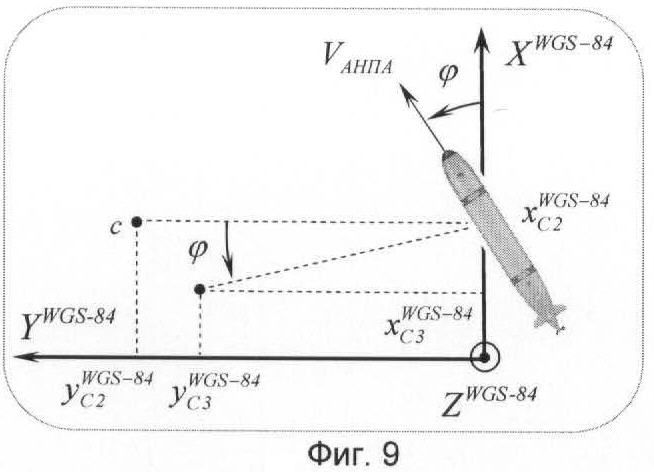
Матрица преобразования, учитывающая поправку на курс АНПА, описывается выражением (фиг.9)
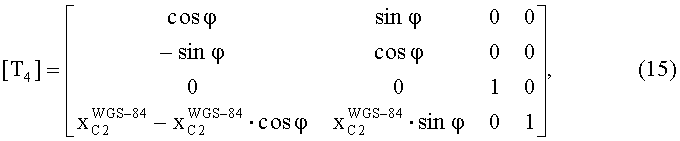
где φ - курс АНПА, град;
 - координаты точки С после поправки на курс АНПА.
- координаты точки С после поправки на курс АНПА.
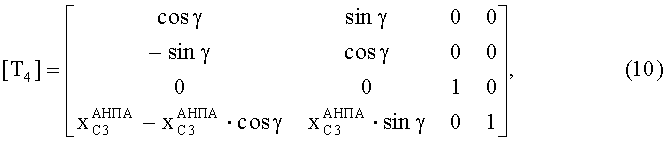
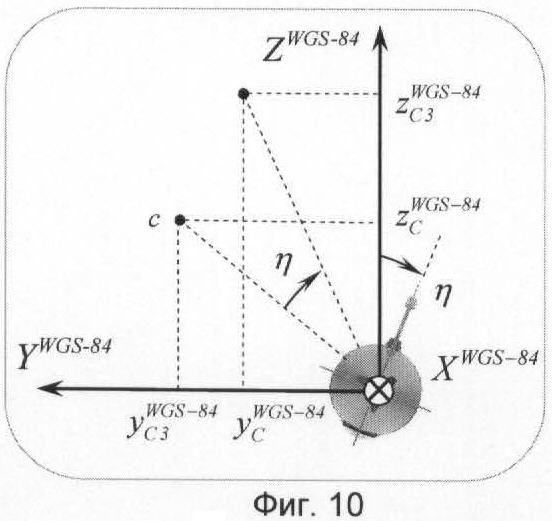
Матрица преобразования, учитывающая крен АНПА (фиг.10)
где η - крен АНПА, град;
 - координаты точки С после поправки на крен АНПА.
- координаты точки С после поправки на крен АНПА.
Таким образом, зная диаметр обследуемого участка трубопровода, отстояние антенны ГБО от дна, расположение антенны ГБО на борту аппарата, местоположение и ориентацию АНПА в системе координат WGS-84 можно по длине отбрасываемой тени определить высотное (величина оголения и провисания) и плановое положение озвученного участка трубопровода в системе координат WGS-84.
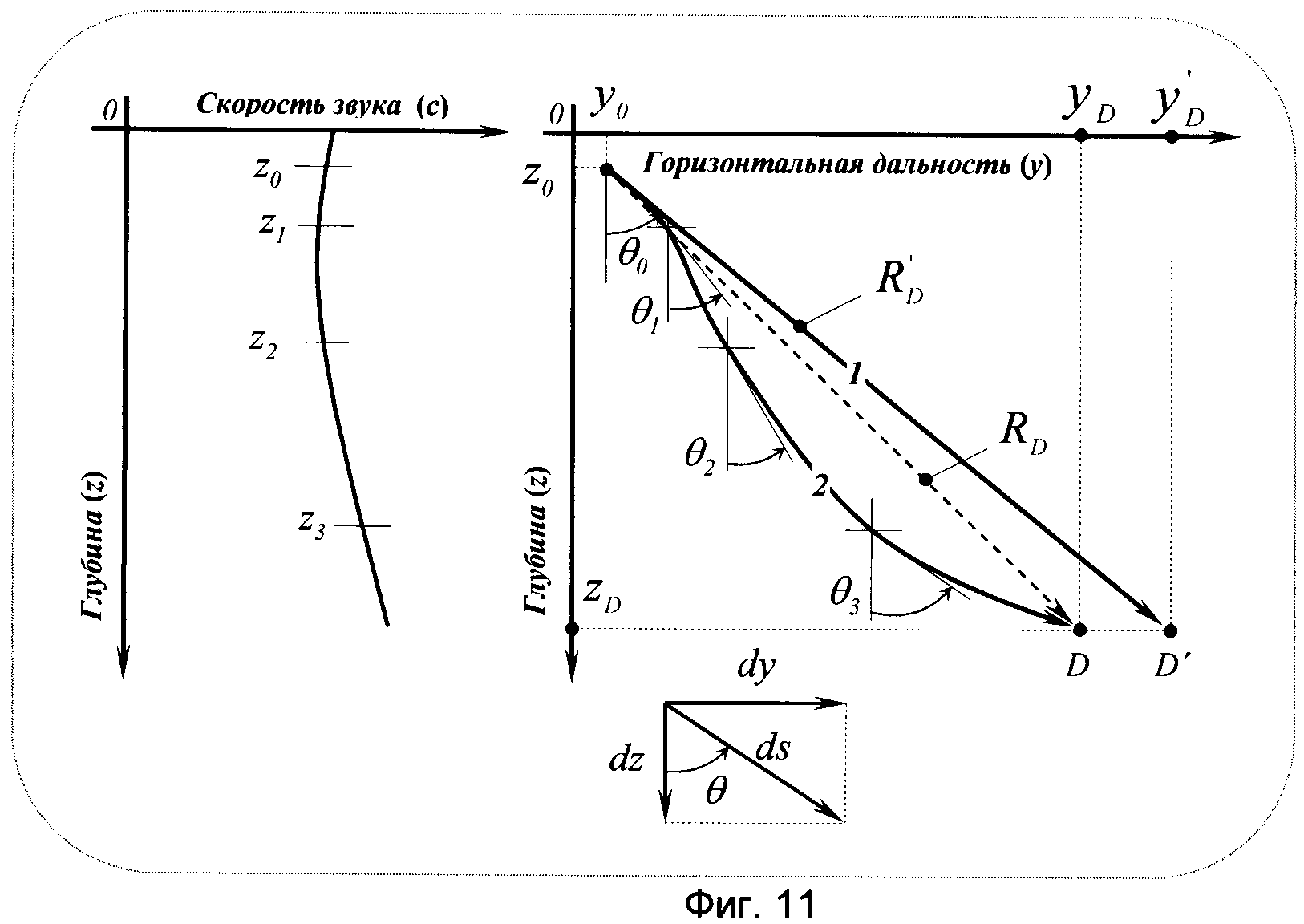
При определении наклонных дальностей необходимо корректировать выходные данные с учетом искривления траектории акустических лучей в водной среде.
Для расчета траектории лучей в неоднородной среде применяется закон Снеллиуса, в соответствии с которым угол падения θ на глубине z находится по известному углу падения θi на глубине zi (К.Клей, Г.Медвин. Акустическая океанография. - М.: МИР, 1980. - с.95)

где c(zi) - скорость звука на глубине zi;
а - лучевой параметр.
Последовательное применение закона Снеллиуса к непрерывному распределению c(z) иллюстрируется на фиг.11, где 1 - траектория акустического луча до коррекции, 2 - траектория акустического луча после коррекции,  - наклонная дальность до трубопровода (точка D') до коррекции, RD - наклонная дальность до трубопровода (точка D) после коррекции.
- наклонная дальность до трубопровода (точка D') до коррекции, RD - наклонная дальность до трубопровода (точка D) после коррекции.
Горизонтальная дальность до озвученного участка трубопровода (точка D) является интегралом от dy при интегрировании вдоль траектории акустического луча в пределах от начальной глубины z0 до конечной zC (К.Клей, Г.Медвин. Акустическая океанография. - М.: МИР, 1980. - с.96)

Это уравнение может быть решено для определенного профиля c(z), если заданы начальные значения z0 и θ0.
Наклонная дальность до участка трубопровода (точка D') до коррекции определяется соотношением

где c0 - скорость звука у антенны ГБО, м/с;
Δt - время задержки эхо-сигнала относительно момента излучения, с.
Угол падения θ0 определяется соотношением

Наклонная дальность до озвученного участка трубопровода (точка D) после коррекции определяется выражением

Для вычисления интеграла (18) используются аппроксимации действительного профиля c(z). Применяется либо кусочно-линейная аппроксимация, либо ступенчатая аппроксимация профиля скорости звука.
При кусочно-линейной аппроксимации сложный профиль скорости звука заменяется несколькими участками, в каждом из которых градиент скорости звука по глубине остается постоянным.
При ступенчатой аппроксимации профиля скорости звука горизонты, на которых производится ее измерение, считаются границами слоев, скорость звука в каждом слое считается постоянной и равной среднему значению результатов измерений, полученных на верхней и нижней границе слоя.
Сущность изобретения поясняется фиг.1-12, где на фиг.1 изображено обследование оголенного участка трубы с помощью ГБО, на фиг.2 - обследование провисающего участка трубы с помощью ГБО, на фиг.3 - определение координат трубопровода в системе WGS-84, на фиг.4 - поправка на запаздывание, на фиг.5 - ошибка угла дифферента, на фиг.6 - ошибка угла рыскания, на фиг.7 - ошибка угла крена, на фиг.8 - учет дифферента АНПА, на фиг.9 - учет угла курса АНПА, на фиг.10 - учет крена АНПА, на фиг.11 - профиль скорости звука (слева) и траектория акустического луча справа, векторная диаграмма (снизу): элемент расстояния ds вдоль траектории, выраженный через горизонтальное и вертикальное смещения dy и dz, на фиг.12 - устройство, реализующее способ.
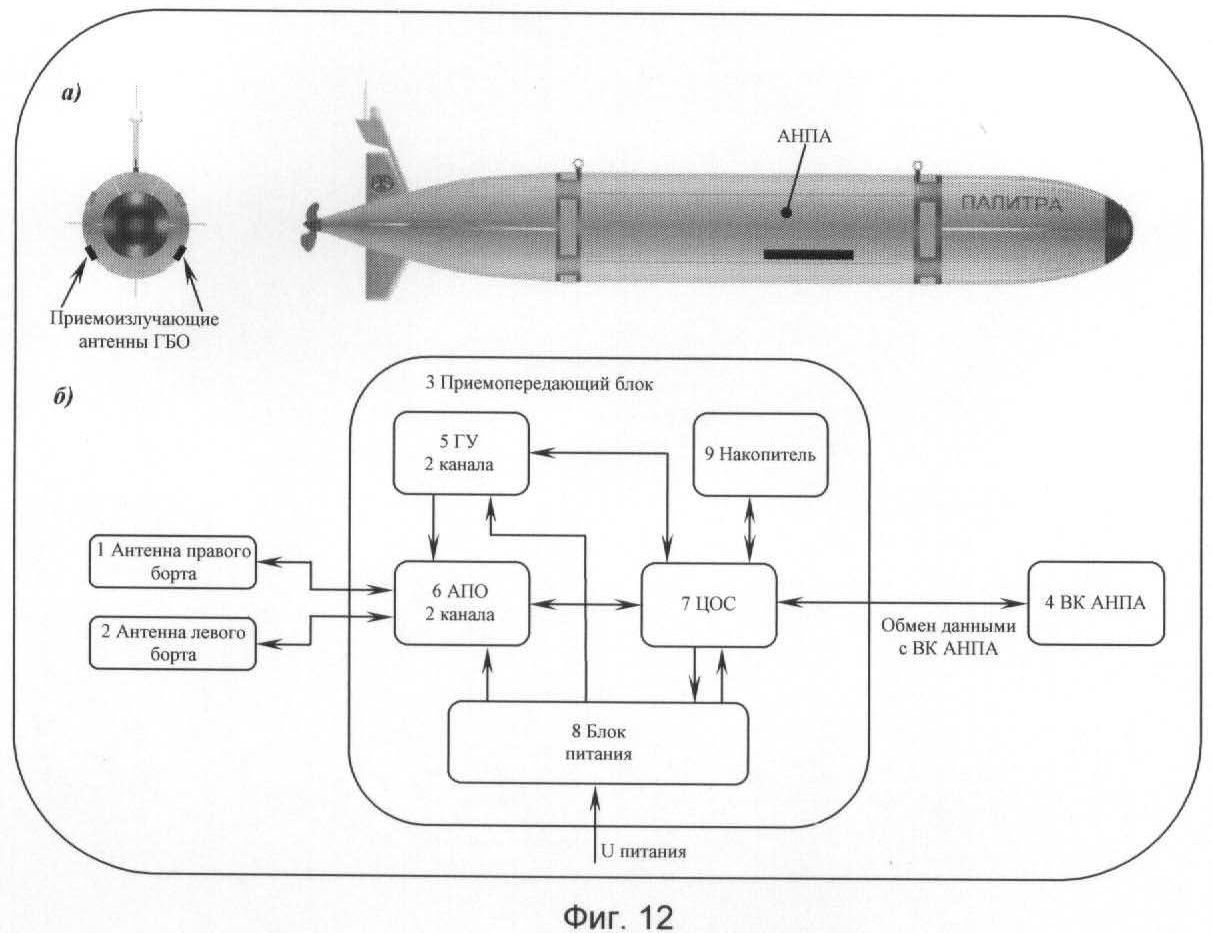
Устройство, реализующее способ (фиг.12,б)), содержит две гидроакустические приемоизлучающие антенны 1, 2, приемопередающий блок 3 и вычислительный комплекс 4. Антенны устанавливаются с двух бортов АНПА (фиг.12,а)), при этом оси диаграмм направленностей антенн направлены вбок перпендикулярно вектору перемещения и несколько наклонены в сторону дна на угол 10-20 градусов относительно горизонта. Выводы от антенн соединяются с аппаратурой приемопередающего блока, размещенного в герметичном корпусе. Приемопередающий блок имеет также разъем для получения напряжения питания с борта аппарата и разъем для двустороннего обмена данными с ВК АНПА.
В состав приемопередающего блока ГБО входят: генераторное устройство 5; аппаратура 6 предварительной обработки эхосигналов; модуль 7 цифровой обработки сигналов; блок 8 питания; накопитель 9.
ГУ обеспечивает формирование зондирующего импульса одновременно для антенн левого и правого бортов. АПО усиливает эхосигналы антенн левого и правого бортов с полосовой фильтрацией в диапазоне рабочих частот ГБО, выполняет аналого-цифровое преобразование. Модуль ЦОС обеспечивает обмен данными с ВК АНПА, управление работой аппаратуры ГБО, формирования зондирующих сигналов, цифровую обработку сигналов, архивирование данных во время миссии, выкачку данных на внешний носитель, диагностику неисправности приемопередающего блока и входящих в его состав узлов. Блок питания обеспечивает прием питания с борта АНПА, преобразование бортового напряжения в напряжения питания электронных узлов блока и выдачу их потребителям при поступлении внешней команды на включение гидролокатора. Накопитель на flash-диске обеспечивает хранение первичной гидроакустической информации и диагностической информации о текущем состоянии аппаратуры ГБО, а также навигационных данных, поступающих с ВК АНПА. В ВК АНПА осуществляется определение высотного и планового положения трубопровода согласно способу.
Описание способа целесообразно совместить с описанием работы устройства.
До определения положения подводного трубопровода определяют линейное смещение начал «приборной» и «судовой» систем координат, затем на специально оборудованном полигоне производят калибровку ГБО, определяя постоянные систематические ошибки по углу дифферента α, углу рыскания γ, углу крена θ и ошибки задержки между выдачей навигационных данных и приемом отраженных от дна эхосигналов (фиг.4, фиг.5, фиг.6, фиг.7). При подаче питания на ГБО питание подается на все электронные узлы приемопередающего блока. Настройка параметров (тип сигнала, мощность излучаемого сигнала, шкала, длительность импульса излучения) осуществляется как в автоматическом режиме, так и по командам, поступающим с ВК АНПА. При подаче внешнего сигнала начала работы ГБО и поступлении данных с ВК АНПА подается команда на запуск ГУ 5. После чего антенны 1 или 2 излучают зондирующие импульсы в водную среду (фиг.1, фиг.2). Одновременно с запуском ГУ поступает команда на АПО 6. Принятые антенной 1 или 2 эхосигналы усиливаются, выполняется полосовая фильтрация и далее сигналы поступают на аналого-цифровые преобразователи и, после преобразования, поступают в модуль ЦОС 7. В модуле ЦОС 7 сигналы фильтруют, формируют комплексные огибающие принятых сигналов. Сигналы, сформированные в модуле ЦОС 7, записывают в накопитель 9, а также передают в ВК АНПА для совместной обработки сигналов за несколько циклов «излучение-прием». В ВК АНПА поступают также данные от промерного эхолота и датчика скорости звука. В ВК АНПА вычисляют наклонные дальности до каждого озвученного участка, определяют границы зоны акустической тени от оголенного участка трубопровода, корректируют наклонные дальности до каждого озвученного участка и границы зоны акустической тени от оголенного участка трубопровода, по построенному распределению скорости звука в воде (фиг.11), производят автоматический расчет координат трубопровода в «приборной» системе и оценку его высотного положения относительно линии дна в режиме реального времени. Обработанные данные и принятые решения также записываются в накопитель 9, наряду с отстоянием АНПА от дна, скоростью движения АНПА, координатами и ориентацией АНПА в мировой геодезической системе координат, вертикальным распределением скорости звука в воде. Координаты трубопровода в мировой геодезической системе координат можно определять в режиме реального времени в ВК АНПА, либо в процессе камеральной обработки, подняв аппарат на борт судна обеспечения (СО). Во время нахождения АНПА на борту СО осуществляется съем записанных на накопитель данных с последующей их обработкой для расчета координат трубопровода в мировой геодезической системе координат WGS-84 по формулам (5)-(16) с учетом ориентации АНПА в системе координат WGS-84 (фиг.8, фиг.9, фиг.10) и построения гидролокационного изображения обследуемого участка трубопровода. Способ и устройство позволяют выявить аварийные участки трубопровода, выявить и идентифицировать опасные или неблагоприятные придонные объекты рядом с трубопроводом, обнаружить места истечения газа из микросвищей, определить геоморфологические особенности рельефа дна в районе прокладки трубопровода.
Таким образом, предложены способ и устройство определения координат обследуемого участка трубопровода, уложенного на ровное дно, в мировой геодезической системе WGS-84 с учетом вертикального распределения скорости звука в водной среде, поправок на расположение антенны ГБО на борту аппарата, задержку между выдачей навигационных данных и приемом отраженных от дна эхосигналов, местоположение и ориентацию АНПА в системе WGS-84. Разработан математический аппарат для расчета высотного положения трубопровода относительно линии дна и положения трубопровода в мировой геодезической системе координат.
Интерпретация данных ГБО в режиме реального времени для определения высотного положения трубопровода относительно линии дна позволяет автоматически обнаружить наличие аварийной ситуации (провисающий участок) и передать координаты этого участка по гидроакустическому каналу связи на СО без подъема АНПА. Погрешность определения оголений и провисаний обследуемого участка трубопровода предложенным способом не превышает нескольких сантиметров, что позволяет оперативно провести дообследование аварийного участка и заблаговременно спланировать работы по устранению неисправности прежде, чем трубопроводная система будет повреждена.
Включение разработанного метода определения положения трубопровода в мировой геодезической системе в состав программного обеспечения камеральной обработки данных комплекса поисково-обследовательских средств АНПА позволяет повысить производительность работ по инспекции технического состояния оголенного трубопровода, уложенного на ровное дно.
Таким образом, технический результат изобретения достигнут.




Способ высокоточного координирования подводного комплекса в условиях подледного плавания
Способ и устройство определения начальных координат автономного необитаемого подводного аппарата
Способ высокоточного координирования подводного комплекса в условиях подледного плавания
Способ и устройство определения начальных координат автономного необитаемого подводного аппарата
Система определения координат буксируемого комплекса
Датчик погружения антенны гидроакустического средства

