Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА
Вид РИД
Изобретение
Настоящее изобретение относится к области подводной навигации и может быть использовано для определения начальных координат автономного необитаемого подводного аппарата (АНПА) после отправки его с обеспечивающего судна (ОС) для выполнения заданной миссии подо льдами в высоких арктических широтах.
После погружения на заданную глубину АНПА необходимо выйти в заданную точку пространства и приступить к выполнению миссии, для этого требуется определить начальные координаты АНПА (начальное местоположение АНПА в водной среде после погружения).
Определение начальных координат АНПА является важным аспектом выполнения миссии, поскольку в последующем координирование АНПА осуществляется бортовой системой счисления пути, требующей периодической коррекции вычисляемых координат.
Для выполнения коррекции используют данные от гидроакустических навигационных систем (ГАНС), однако выполнение процедуры коррекции позволяет устранить лишь часть ошибки, что приводит к ее накоплению.
В случае большой погрешности определения начальных координат АНПА, с учетом накапливающейся ошибки, обусловленной работой бортовой системы счисления, АНПА отклоняется от намеченного маршрута движения, в результате возникают трудности с возвращением АНПА на ОС, а также возможны пропуски при обследовании донной поверхности.
Известен способ подледной навигации АНПА, в котором координаты АНПА (в том числе и начальные) определяют с помощью размещенной на его борту ГАНС с ультракороткой базой (ГАНС-УКБ) путем измерения дальности и пеленга до гидроакустического маяка (ГМ), географические координаты которого известны (Арктические подводные операции / Под ред. Л. Рея: Пер с англ. - Л.: Судостроение, 1989. - С. 263-264). ГМ размещают стационарно на дне или подвешивают через прорубь во льду.
К недостаткам данного способа-аналога относят зависимость ошибки определения местоположения ГАНС-УКБ от дальности, в результате при дальности более 1 км точность определения местоположения становится недостаточной для решения задачи координирования АНПА. Кроме того, для определения пеленга ГАНС-УКБ оснащается магнитным датчиком курса, имеющего значительную погрешность в высоких арктических широтах.
Кроме того, необходимость учета дрейфа ледового поля, на которое устанавливают ГМ, а также отсутствие возможности оперативно менять положение ГМ при обследовании больших акваторий, ограничивают использование указанного способа.
Известен способ подводной навигации АНПА (Щербатюк А.Ф., Дубровин Ф.С. Алгоритмы определения местоположения АНПА на основе информации о дальности до одного мобильного гидроакустического маяка // Информационно-измерительные и управляющие системы. - 2012. - №9. - С. 26-39), в котором координаты АНПА (в том числе и начальные) определяют с помощью ГАНС-УКБ путем измерения дальности и пеленга до ГМ, который перемещают за ОС, по траектории, обеспечивающей минимизацию ошибки оценивания местоположения АНПА.
К недостаткам данного способа следует отнести использование магнитного датчика курса, а также ограниченные маневренные возможности ОС и буксируемого ГМ, что снижает точность определения координат АНПА.
Наиболее близким аналогом к предлагаемому способу является способ подводной навигации АНПА (патент на изобретение РФ №2555479 «Способ высокоточного координирования подводного комплекса в условиях подледного плавания»), в котором: в качестве гидроакустического маяка ГМ используют телеуправляемый необитаемый подводный аппарат (ТНПА), снабженный гидроакустическим маяком-ответчиком (ГМО) и управляемый с обеспечивающего судна (ОС) по кабелю, в водную среду излучают пакет навигационных данных о горизонтальных координатах и глубине нахождения ГМ в локальной системе координат (ЛСК) 0XYZ первой гидроакустической аппаратурой передачи информации (ГАПИ), размещенной на ТНПА, прием данных от ГМ осуществляют второй ГАПИ, размещенной на АНПА, измеряют глубину движения аппарата ZАНПА(tk) в ЛСК с помощью датчика глубины и модуль вектора скорости его движения VАНПА(tk) к моменту времени с помощью доплеровского гидроакустического лага, последовательно принимают акустические импульсы гидроакустической навигационной системой с ультракороткой базой (ГАНС-УКБ), размещенной на ОС, и определяют наклонную дальность от ГМО до фазового центра антенны ГАНС-УКБ и курсовой угол между носовой частью строительной оси ОС и направлением на ГМО, определяют географические координаты ОС первым и вторым радионавигационными приемниками GPS/ГЛОНАСС, которым снабжено ОС, приемные антенны которых размещены вдоль строительной оси ОС в носовой и кормовой части, соответственно, пересчитывают географические координаты ОС в ЛСК, рассчитывают координаты ГМ в ЛСК, после чего производят коррекцию координат АНПА системой коррекции координат, размещенной на АНПА, с помощью которой оценивают горизонтальные координаты АНПА в ЛСК.
Из описания способа-прототипа следует, что этот способ реализован системой, включающей в себя обеспечивающее судно (ОС), на котором установлены первая радиоприемная антенна, первый радионавигационный приемник, вторая радиоприемная антенна, второй радионавигационный приемник, гидроакустическая антенна ГАНС-УКБ, аппаратура ГАНС-УКБ, первый бортовой вычислитель, система управления, также содержащей телеуправляемый необитаемый подводный аппарат (ТНПА), включающий второй бортовой вычислитель, первую ГАПИ, гидроакустическую антенну первой ГАПИ, гидроакустический маяк-ответчик, также содержащей автономный необитаемый подводный аппарат (АНПА), включающий вторую ГАПИ, гидроакустическую антенну второй ГАПИ, датчик глубины, доплеровский гидроакустический лаг, систему коррекции и управления.
Существенным недостатком способа-прототипа и реализующей его системы является использование слабонаправленных гидроакустических приемоизлучающих антенн в первой и второй ГАПИ для определения наклонной дальности между АНПА и ТИПА за счет измерения времени распространения навигационного пакета. В результате при работе АНПА и ТНПА вблизи границ раздела сред («лед-вода», «воздух-вода», «вода-дно») возникают переотражения, приводящие к аномальным ошибкам при оценке координат АНПА в ЛСК, также снижается дальность действия канала ГАПИ, поскольку передаваемый сигнал излучается слабонаправленной антенной в значительную часть окружающего ТИПА пространство.
Кроме того, неучет рефракции акустических волн в воде приводит возрастанию погрешности при оценке наклонной дальности от АНПА до ГМ.
К недостаткам также можно отнести отсутствие учета расположения зон акустической освещенности в водной среде при координировании АНПА, что может привести к невозможности координирования из-за отсутствия акустического контакта между первой и второй ГАПИ.
Задача изобретения состоит в обеспечении проведения эффективных подледных исследований в высоких арктических широтах с помощью АНПА.
Технический результат заключается в уменьшении погрешности оценки начальных координат АНПА.
Для обеспечения указанного технического результата в способ подводной навигации АНПА, в котором в качестве гидроакустического маяка ГМ используют телеуправляемый необитаемый подводный аппарат (ТНПА), снабженный гидроакустическим маяком-ответчиком (ГМО) и управляемый с обеспечивающего судна (ОС) по кабелю, в водную среду излучают пакет навигационных данных о горизонтальных координатах и глубине нахождения ГМ в локальной системе координат (ЛСК) 0XYZ первой гидроакустической аппаратурой передачи информации (ГАПИ), размещенной на ТНПА, прием данных от ГМ осуществляют второй ГАПИ, размещенной на АНПА, измеряют глубину движения аппарата ZАНПА(tk) в ЛСК с помощью датчика глубины и модуль вектора скорости его движения VАНПА(tk) к моменту времени tk с помощью доплеровского гидроакустического лага, последовательно принимают акустические импульсы гидроакустической навигационной системой с ультракороткой базой (ГАНС-УКБ), размещенной на ОС, и определяют наклонную дальность от ГМО до фазового центра антенны ГАНС-УКБ и курсовой угол между носовой частью строительной оси ОС и направлением на ГМО, определяют географические координаты ОС первым и вторым радионавигационными приемниками GPS/ГЛОНАСС, которым снабжено ОС, приемные антенны которых размещены вдоль строительной оси ОС в носовой и кормовой части, соответственно, пересчитывают географические координаты ОС в ЛСК, рассчитывают координаты ГМ в ЛСК, после чего производят коррекцию координат АНПА системой коррекции координат, размещенной на АНПА, с помощью которой оценивают горизонтальные координаты АНПА в ЛСК, введены новые признаки, а именно: сканируют пространство в вертикальной плоскости посредством размещенного на носовой части АНПА гидролокатора секторного обзора (ГСО), антенны которого обеспечивают направленное излучение и прием сигналов в пределах сектора обзора, до момента погружения АНПА рассчитывают зоны акустической освещенности исходя из отстояний ГМ и АНПА от поверхности дна, после погружения на заданную глубину оценивают с помощью ГСО наклонную дальность RАНПА(tk) и направление на ГМ αАНПА(tk) в горизонтальной плоскости, сравнивают значение наклонной дальности RАНПА(tk) с порогом R0, если RАНПА(tk)≤R0, то производят расчет начальных координат АНПА в ЛСК по формулам:



где XГМ(tk), YГМ(tk), ZГМ(tk) - координаты ГМ в ЛСК в момент времени tk,
если RАНПА(tk)>R0, то выдают команду движителям АНПА пройти расстояние (RАНПА(tk)-R0) в направлении αАНПА(tk) на ТНПА, после прохождения АНПА заданного расстояния с помощью ГСО оценивают наклонную дальность RАНПА(tk+Δt) и направление на ТНПА αАНПА(tk+Δt) в горизонтальной плоскости, где Δt - временной интервал прохождения расстояния (RАНПА(tk)-R0) повторяют процедуру расчета координат ГМ в ЛСК для момента времени tk+Δt, для чего рассчитывают начальные координаты АНПА в ЛСК по формулам:



где XГМ(tk+Δt), YГМ(tk+Δt), ZГМ(tk+Δt) - координаты ГМ в ЛСК в момент времени tk+Δt.
Технический результат достигается также с помощью устройства, содержащего обеспечивающее судно (ОС), телеуправляемый необитаемый подводный аппарат (ТНПА), автономный необитаемый подводный аппарат (АНПА), первую радиоприемную антенну, первый радионавигационный приемник, вторую радиоприемную антенну, второй радионавигационный приемник, гидроакустическую антенну ГАНС-УКБ, аппаратуру ГАНС-УКБ, первый бортовой вычислитель, систему управления, второй бортовой вычислитель, гидроакустическую антенну первой гидроакустической аппаратуры передачи информации (ГАПИ), первую ГАПИ, гидроакустический маяк-ответчик, гидроакустическую антенну второй ГАПИ, вторую ГАПИ, гидролокатор секторного обзора (ГСО), датчик глубины, доплеровский гидроакустический лаг, систему коррекции и управления, при этом обеспечивающее судно содержит первую радиоприемную антенну, первый радионавигационный приемник, вторую радиоприемную антенну, второй радионавигационный приемник, гидроакустическую антенну гидроакустической навигационной системы с ультракороткой базой (ГАНС-УКБ), аппаратуру ГАНС-УКБ, первый бортовой вычислитель, систему управления, ТНПА содержит второй бортовой вычислитель, гидроакустическую антенну первой ГАПИ, первую ГАПИ, гидроакустический маяк-ответчик, АНПА содержит гидроакустическую антенну второй ГАПИ, вторую ГАПИ, гидролокатор секторного обзора, датчик глубины, доплеровский гидроакустический лаг, систему коррекции и управления, выход первой радиоприемной антенны соединен с входом первого радионавигационного приемника, выход второй радиоприемной антенны соединен с входом второго радионавигационного приемника, выход гидроакустической антенны ГАНС-УКБ соединен с входом аппаратуры ГАНС-УКБ, выходы первого и второго радионавигационных приемников соединены с первым и вторым входами первого бортового вычислителя соответственно, выход аппаратуры ГАНС-УКБ соединен с третьим входом первого бортового вычислителя, выход первого бортового вычислителя соединен с входом системы управления, система управления имеет двухстороннюю связь вторым бортовым вычислителем через его первый вход, выход гидроакустической антенны первой ГАПИ соединен с входом первой ГАПИ, первая ГАПИ имеет двухстороннюю связь со вторым бортовым вычислителем через его второй вход, гидроакустический маяк-ответчик имеет двухстороннюю связь с вторым вычислителем через его третий вход, выход гидроакустической антенны второй ГАПИ соединен с входом второй ГАПИ, выход которой соединен с первым входом системы коррекции и управления, выходы гидролокатора секторного обзора, датчика глубины и доплеровского гидроакустического лага соответственно соединены со вторым, третьим и четверым входами системы коррекции и управления.
Новыми существенными признаками в заявленном устройстве являются гидролокатор секторного обзора, размещенный в носовой части АНПА и его связь со вторым входом системы управления и коррекции.
Таким образом, использование ГСО, антенны которого обеспечивают направленное излучение и прием сигналов в пределах сектора обзора, для оценки дальности от АНПА до ГМ и направления на ГМ позволяет производить селекцию переотражений от границ раздела, а также сближаться АНПА с ГМ, при необходимости, что в совокупности с учетом зон акустической освещенности для обеспечения работы ГМ и АНПА позволяет минимизировать погрешность оценки координат АНПА в ЛСК.
Поясним достижение технического результата.
Погрешность оценки координат (в том числе и начальных) АНПА в ЛСК складывается из погрешности оценки координат ГМ в ЛСК и погрешности оценки наклонной дальности RАНПА(tk) от АНПА до ГМ и углового направления αАНПА(tk) от АНПА на ГМ в горизонтальной плоскости.
Погрешность оценки наклонной дальности от АНПА до ГМ складывается из инструментальной и методической погрешностей.
Использование слабонаправленных гидроакустических антенн в системах ГАНС-УКБ обуславливает многолучевое распространение акустических сигналов в водной среде, выражающееся в переотражениях от границ раздела сред («лед-вода», «воздух-вода», «вода-дно»), в результате возникают дополнительные флуктуации огибающей принимаемых сигналов, что приводит к увеличению случайной составляющей методической погрешности оценки наклонной дальности от АНПА до ГМ.
В настоящее время современные ГСО, устанавливаемые на АНПА, обеспечивают относительно высокое разрешение по угловым координатам (0.5°-5° - в вертикальной плоскости и 0.5°-2° - в горизонтальной плоскости) за счет применения направленных антенн, что позволяет выполнять фильтрацию переотражений от границ раздела сред в аппаратуре ГСО, реализующей указанную фильтрацию. В результате уменьшается случайная составляющая методической погрешности оценки наклонной дальности от АНПА до ГМ.
Кроме того, использование направленных антенн в ГСО обеспечивает большее отношение «сигнал/шум» в точке приема за счет возможности излучения акустических сигналов с большей мощностью, по сравнению с ГАНС-УКБ.
Из теории гидролокации (Яковлев. А.Н, Каблов Г.П. Гидролокаторы ближнего действия. Л.: Судостроение, 1983. С. 76) известно, что случайная составляющая инструментальной погрешности оценки дальности и оценки угловой координаты для гидролокатора обратно пропорциональны отношению «сигнал/шум», таким образом, в результате использования ГСО также снижается случайная составляющая инструментальной погрешности оценки наклонной дальности от АНПА до ГМ RАНПА(tk) и углового направления αАНПА(tk) от АНПА на ГМ в горизонтальной плоскости.
Суммарная погрешность оценки наклонной дальности в ГСО пропорциональна величине наклонной дальности (Яковлев. А.Н, Каблов Г.П. Гидролокаторы ближнего действия. Л.: Судостроение, 1983. С.74.), поэтому сближение АНПА с ГМ при выполнении условия RАНПА(tk)>R0 (порог) позволяет уменьшить наклонную дальность RАНПА(tk) между ними, тем самым уменьшается и погрешность оценки наклонной дальности между АНПА и ГМ. Значение порога по наклонной дальности R0, определяется исходя из требуемой точности оценки наклонной дальности и фактической зависимости суммарной погрешности оценки наклонной дальности от наклонной дальности.
Предварительный расчет координат зон акустической освещенности позволяет определить положения АНПА и ГМ (ТНПА) по глубине для которых отношение «сигнал/шум» будет обеспечивать заданную погрешность оценки наклонной дальности между АНПА и ГМ, а также углового направления на ГМ для последующего расчета координат АНПА в ЛСК.
Нахождение в зоне акустической освещенности АНПА и ГМ также будет обеспечивать передачу информации о расположении ГМ в ЛСК по гидроакустическому каналу связи (первая и вторая ГАПИ и их гидроакустические антенны), в противном случае работа системы координирования АНПА станет невозможной.
Расчет координат зон акустической освещенности выполняется по известной методике (Матвиенко В.Н, Тарасюк Ю.Ф. Дальность действия гидроакустических средств. - Л.: Судостроение, 1976. С. 174), с учетом предполагаемых отстояний ГМ и АНПА от поверхности дна, а также вертикального распределения скорости звука по глубине в районе выполнения работ.
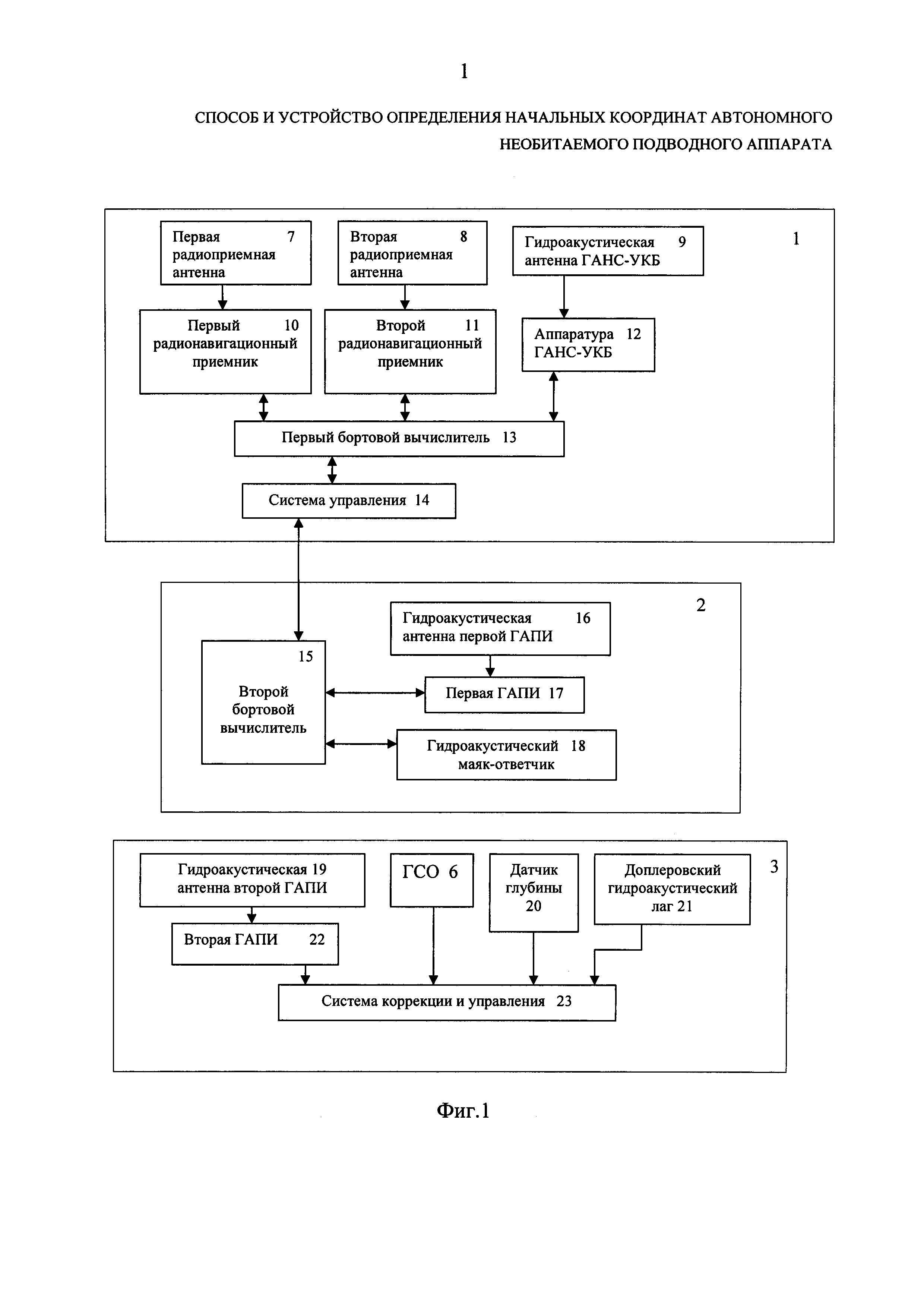
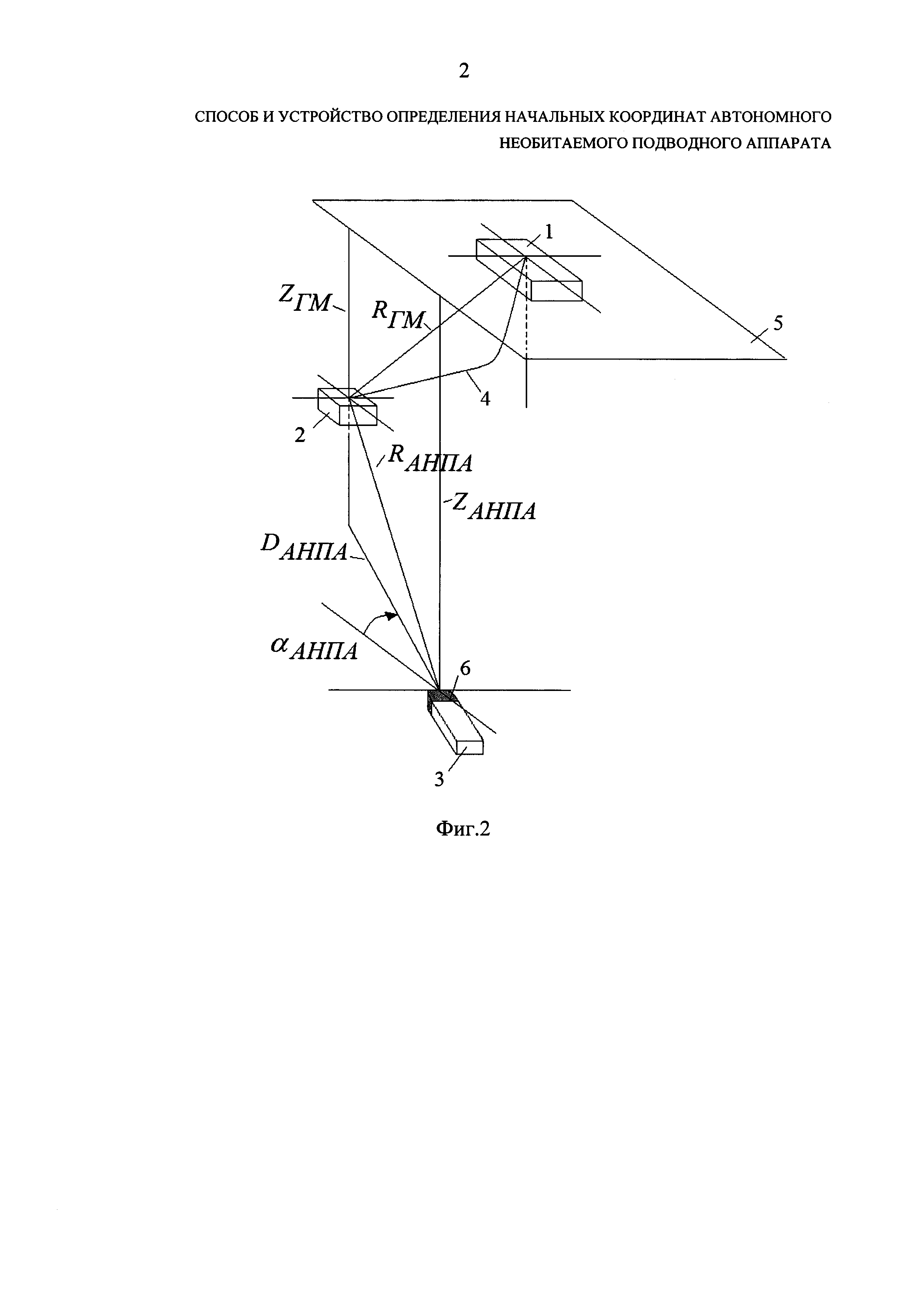
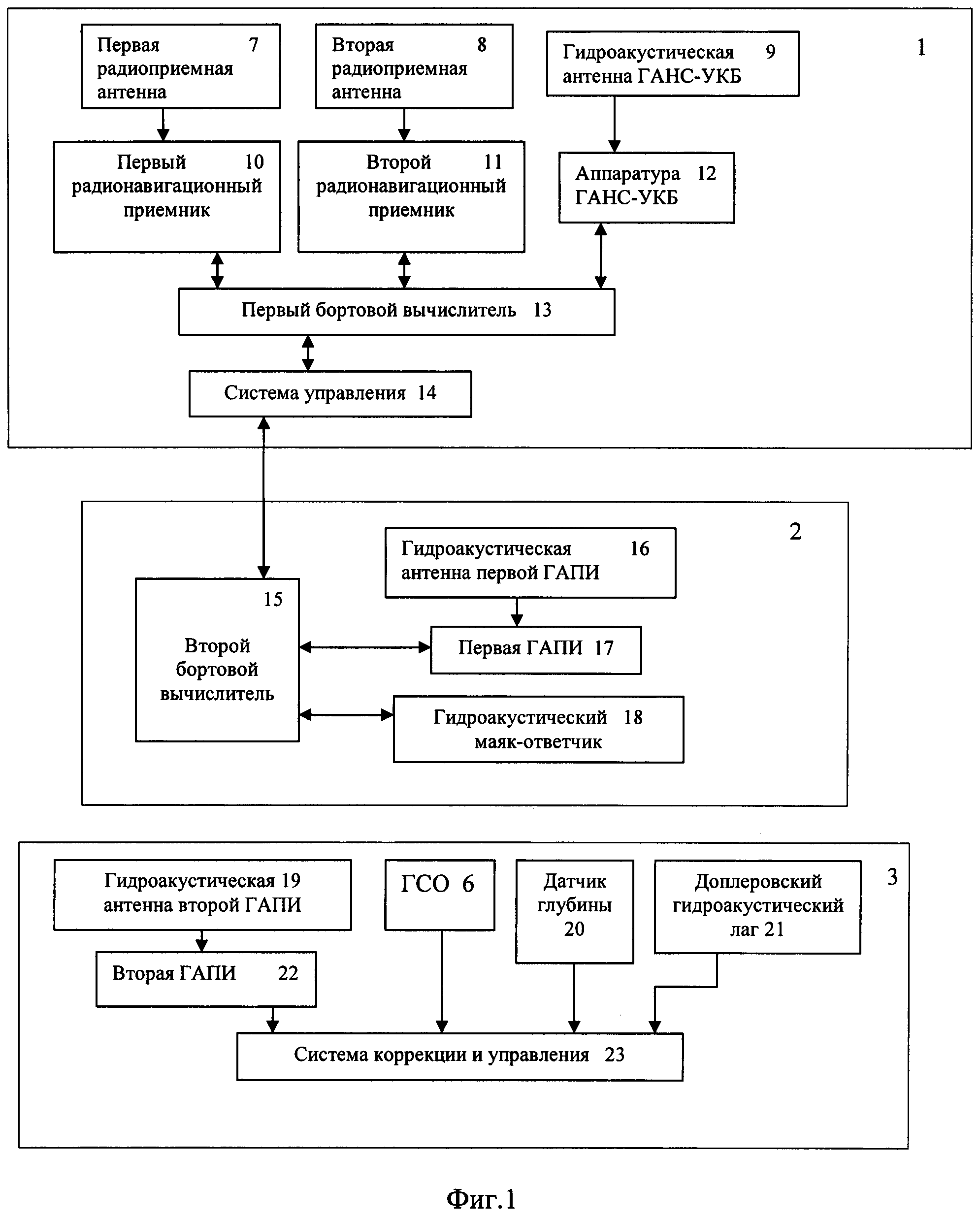
Сущность изобретения поясняются фиг. 1 и 2, где на фиг. 1 приведена структурная блок-схема устройства, реализующего предлагаемый способ, а на фиг. 2 показана геометрия задачи оценки координат АНПА, на которой - кабель 4, граница 5 раздела «воздух-вода».
Устройство (фиг. 1) состоит из обеспечивающего судна 1 (ОС), телеуправляемого необитаемого подводного аппарата 2 (ТНПА), автономного необитаемого подводного аппарата 3 (АНПА), первой радиоприемной антенны 7, первого радионавигационного приемника 10, второй радиоприемной антенны 8, второго радионавигационного приемника 11, гидроакустической антенны 9 ГАНС-УКБ, аппаратуры 12 ГАНС-УКБ, первого бортового вычислителя 13, системы 14 управления, второго бортового вычислителя 15, гидроакустической антенны 16 первой ГАПИ, первой ГАПИ 17, гидроакустического маяка-ответчика 18, гидроакустической антенны 19 второй ГАПИ, второй ГАПИ 22, гидролокатора 6 секторного обзора, датчика 20 глубины, доплеровского гидроакустического лага 21, системы 23 коррекции и управления.
Обеспечивающее судно 1 содержит первую радиоприемную антенну 7, первый радионавигационный приемник 10, вторую радиоприемную антенну 8, второй радионавигационный приемник 11, гидроакустическую антенну 9 ГАНС-УКБ, аппаратуру 12 ГАНС-УКБ, первый бортовой вычислитель 13, систему 14 управления, ТНПА 2 содержит второй бортовой вычислитель 15, гидроакустическую антенну 16 первой ГАПИ, первую ГАПИ 17, гидроакустический маяк-ответчик 18, АНПА 3 содержит гидроакустическую антенну 19 второй ГАПИ, вторую ГАПИ 22, гидролокатор 6 секторного обзора, датчик 20 глубины, доплеровский гидроакустический лаг 21, систему 23 коррекции и управления, при этом выход первой радиоприемной антенны 7 соединен с входом первого радионавигационного приемника 10, выход второй радиоприемной антенны 8 соединен с входом второго радионавигационного приемника 11, выход гидроакустической антенны 9 ГАНС-УКБ соединен с входом 12 аппаратуры ГАНС-УКБ, выходы первого и второго радионавигационных приемников 10 и 11 соединены с первым и вторым входами первого бортового вычислителя 13 соответственно, выход аппаратуры 12 ГАНС-УКБ соединен с третьим входом первого бортового вычислителя 13, выход первого бортового вычислителя 13 соединен с входом системы 14 управления, система 14 управления имеет двухстороннюю связь вторым бортовым вычислителем 15 через его первый вход, выход гидроакустической антенны 16 первой ГАПИ соединен с входом первой ГАПИ 17, первая ГАПИ 17 имеет двухстороннюю связь со вторым бортовым вычислителем 15 через его второй вход, гидроакустический маяк-ответчик 18 имеет двухстороннюю связь со вторым вычислителем 15 через его третий вход, выход гидроакустической антенны 19 второй ГАПИ соединен с входом второй ГАПИ 22, выход которой соединен с первым входом системы 23 коррекции и управления, выходы гидролокатора 6 секторного обзора, датчика 20 глубины и доплеровского гидроакустического лага 21 соответственно соединены со вторым, третьим и четверым входами системы 23 коррекции и управления.
В качестве обеспечивающего судна 1 может быть использовано судно ледового класса.
Вдоль строительной оси ОС 1 в носовой и кормой части размещены первая и вторая радиоприемные антенны 7 и 8, соответственно. На ОС 1 также размещены первый и второй радионавигационные приемники 10 и 11, гидроакустическая антенна 9 ГАНС-УКБ, аппаратура 12 ГАНС-УКБ, бортовой вычислитель 13 и система управления 14.
В качестве ТНПА 2 может быть использован ТНПА среднего класса Cougar XT фирмы «SeaEye». На ТНПА 2 размещены: гидроакустическая антенна 16 первой ГАПИ, первой ГАПИ 17, гидроакустический маяк-ответчик 18. ТНПА 2 используют в качестве подвижного гидроакустического маяка, управляемого по кабелю 4 с ОС 1.
В качестве АНПА 3 может быть использован аппарат Remus 600 фирмы «Hybroid Kongsberg». В носовой части АНПА 3 размещены гидролокатор 6 секторного обзора (ГСО) с возможностью сканирования пространства в вертикальной плоскости, гидроакустическая антенна 19 второй ГАПИ, датчик 20 глубины, доплеровский гидроакустический лаг 21, вторую ГАПИ 22, систему 23 коррекции и управления.
В качестве ГСО 6 можно использовать ГСО See-Echo 3264 фирмы «Marine Electronics».
В качестве первой радиоприемной антенны 7 и второй радиоприемной антенны 8 можно использовать антенну АСНП-5 фирмы «НИИП КП».
Первый радионавигационный приемник 10 и второй радионавигационный приемник 11 являются известными устройствами (например, аппаратура 1К-181 фирмы АО «РИРВ»).
Гидроакустическая антенна 9 ГАНС-УКБ и аппаратура 12 ГАНС-УКБ могут быть реализованы с помощью устройства S2CR 42/65 фирмы «Evologic.GmbH».
Первый бортовой вычислитель 13 и система 14 управления, а также второй бортовой вычислитель 15 и система 23 коррекции и управления реализуются на базе процессорного модуля СРС-308 фирмы «Fastwel».
Гидроакустическая антенна 16 первой ГАПИ, первая ГАПИ 17, гидроакустический маяк-ответчика 18 реализуются на базе устройства S2CR 42/65 фирмы «Evologic.GmbH».
Гидроакустическая антенна 19 второй ГАПИ, вторая ГАПИ 22 также реализуются на базе устройства S2CR 42/65 фирмы «Evologic.GmbH».
В качестве датчика 20 глубины используют датчик ПДТК-Р-МС-22 фирмы СКТБ «ЭЛПА». В качестве доплеровского гидроакустического лага 21 используют лаг WHN 1200 фирмы «Teledyne RD Instruments».
Описание способа целесообразно совместить с описанием работы устройства.
До момента погружения ТНПА 2 и АНПА 3 в первом бортовом вычислителе 13 рассчитывают зоны акустической освещенности, исходя из предполагаемых отстояний ТНПА и АНПА от поверхности дна по известной методике (Матвиенко В.Н, Тарасюк Ю.Ф. Дальность действия гидроакустических средств. - Л.: Судостроение, 1976. С. 174). По кабелю 4 передают координаты зон акустической освещенности во второй бортовой вычислитель 15, размещаемый на ТНПА 2.
Система 14 управления передает командные импульсы, которые через первый бортовой вычислитель 13 запускают работу первого радионавигационного приемника 10, второго навигационного приемника 11, аппаратуры 12 ГАНС-УКБ.
Также командные импульсы от системы 14 управления по кабелю 4 (фиг. 2) запускают работу первой ГАПИ 17 и гидроакустического маяка-ответчика 18 через второй бортовой вычислитель 15. Далее гидроакустический маяк-ответчик 18 излучает в водную среду акустические сигналы, которые принимаются гидроакустической антенной 9 ГАНС-УКБ и поступают в первый бортовой вычислитель 13 для оценки координат ТНПА 2 в локальной системе координат (ЛСК) 0XYZ.
Первая радиоприемная 7 антенна и вторая радиоприемная 8 антенна принимают сигналы от спутников для оценки географических координат ОС 1. Далее обработанные первым и вторым радионавигационными приемниками 10 и 11 сигналы поступают в первый бортовой вычислитель 13 для оценки географических координат ОС, учитываемых при расчете координат ТНПА 2 в ЛСК, который также выполняется в первом бортовом вычислителе 13.
Далее с помощью первой ГАПИ 17 и гидроакустической антенны 16 первой ГАПИ в водную среду излучают пакет навигационных данных о горизонтальных координатах и глубине нахождения ТНПА 2 в ЛСК.
На АНПА 3 принимают пакет навигационных данных с помощью гидроакустической антенны 19 второй ГАПИ и второй ГАПИ 22. Датчиком 20 глубины измеряют глубину в момент времени - tk - ZАНПА(tk), а доплеровским гидроакустическим лагом 21 измеряют скорость движения АНПА3 -VАНПА(tk).
После погружения на заданную глубину ZАНПА(tk) с помощью ГСО 6 последовательно сканируют пространство в вертикальной плоскости с целью обнаружения ГМ (ТНПА). С помощью аппаратуры ГСО 6 обнаруживают сигнал, отраженный от ГМ, по которому оценивают наклонную дальность RАНПА(tk) и направление на ТНПА 2 αАНПА(tk) в горизонтальной плоскости. При этом для снижения погрешности оценки наклонной дальности и углового направления на ТНПА 2 αАНПА(tk) в горизонтальной плоскости отфильтровывают переотражения от границ раздела сред, а также регулируют мощность излучаемого сигнала для обеспечения приемлемого отношения «сигнал/шум».
В системе 23 коррекции и управления сравнивают значение наклонной дальности RАНПА(tk) с порогом R0.
Если RАНПА(tk)≤R0, тогда производят расчет начальных координат АНПА 3 в ЛСК по формулам:



где ХГМ(tk), YГМ(tk), ZГМ(tk) - координаты ГМ в ЛСК в момент времени tk.
Если RAHПA(tk)>R0, тогда система 23 коррекции и управления выдает команду движителям АНПА 3 пройти расстояние (RAHПA(tk)-R0) в направлении αАНПА(tk) на ТНПА 2 для уменьшения погрешности оценки наклонной дальности.
После прохождения АНПА 3 заданного расстояния снова оценивают наклонную дальность RАНПА(tk+Δt) и направление на ТНПА 2 αАНПА(tk+Δt) в горизонтальной плоскости с помощью ГСО 6, где Δt - временной интервал прохождения расстояния (RАНПА(tk)-R0.
Повторяют процедуру расчета координат ГМ в ЛСК для момента времени tk+Δt, для чего рассчитывают начальные координаты АНПА 3 в ЛСК по формулам:



где ХГМ(tk+Δt), YГМ(tk+Δt), ZГМ(tk+Δt) - координаты ГМ в ЛСК в момент времени tk+Δt.
Предложены способ и устройство определения начальных координат АНПА, позволяют уменьшить погрешность определения начальных координат АНПА в ЛСК.
Таким образом, технический результат изобретения достигнут.


Способ и устройство для определения положения подводного трубопровода
Способ обнаружения нефтяных пленок на водной поверхности
Способ высокоточного координирования подводного комплекса в условиях подледного плавания
Способ оценки состояния ледового поля
Способ калибровки параметрического тракта и устройство для его осуществления
Медицинская дренажная игла троакарного типа для ультразвуковой визуализации
Способ и устройство для определения положения подводного трубопровода
Способ обнаружения нефтяных пленок на водной поверхности
Способ высокоточного координирования подводного комплекса в условиях подледного плавания
Способ оценки состояния ледового поля
Способ калибровки параметрического тракта и устройство для его осуществления
Медицинская дренажная игла троакарного типа для ультразвуковой визуализации
Параметрический эхоледомер
Система определения координат буксируемого комплекса
Устройство для съемки рельефа дна акватории
Датчик погружения антенны гидроакустического средства

