Результат интеллектуальной деятельности: Способ определения географических координат подводного объекта
Вид РИД
Изобретение
Изобретение относится к области подводной навигации и предназначено для определения географических координат местоположения подводного объекта (ПО).
Известен способ навигации подводного объекта [1] посредством гидроакустической навигационной системы, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками.
Согласно способу [1] гидроакустические приемоответчики размещают на дрейфующих станциях по водной поверхности (дрейфующих навигационных маяках), навигационные параметры подводного объекта относительно дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной и/или ультракороткой базой, и/или в комбинированном режиме (длинная + ультракороткая база), и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы X направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо. Отличительной особенностью данного способа является определение координат ПО в прямоугольной системе координат с началом в точке с известными координатами с использованием навигационной базы из М гидроакустических приемоответчиков, а не географические широта и долгота ПО, что требует дополнительных вычислений. Точность способа существенно зависит от знания координат начала прямоугольной системы.
Наиболее близким к предлагаемому способу по количеству общих признаков и решаемой задаче является способ [2]. Этот способ основан на определении координат ПО посредством гидроакустической навигационной системы, включающей размещение навигационной базы из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на подводном объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом навигации и гидроакустическими приемоответчиками, размещение гидроакустических приемоответчиков на дрейфующих станциях (дрейфующих навигационных маяках) по водной поверхности и донных станциях на морском дне, определение навигационных параметров подводного объекта навигации относительно донных или/и дрейфующей станции или базы из дрейфующих станций, которые определяют в режиме с длинной и/или ультракороткой базой, и/или в комбинированном режиме (длинная + ультракороткая база), и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром баз, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы X направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо, обработку результатов измерений по пространственно-временным массивам наблюдений, определение координат подводного объекта навигации путем вычислений, при вычислении координат выполняют минимизацию погрешности по распределению измеренных координат, причем в вычислительное устройство вводят локальные декартовые координаты для рассматриваемой пространственно-временной области, в которой размещены дрейфующая станция, донные маяки ответчики и подводный объект, определяют временной ход гидроакустической характеристики для полученных временных рядов, при этом определяют экстремальные значения гидроакустической характеристики в каждом полученном ряду измерений методом статистики Герста, а оценку среднего арифметического значения гидроакустической характеристики по пространственно-временным массивам наблюдений выполняют путем вычислений по многомерным квадратурным формулам и функциям Хаара.
Суть данного способа заключается в повышении точности определения координат ПО за счет добавления количества измеряемых параметров и использования статистических методов оценивания. Акустические приемоответчики размещают на дрейфующих станциях по водной поверхности и донных станциях на морском дне. Технический результат: повышение надежности при обеспечении навигации подводных объектов
В приведенных патентах можно выделить два признака, а именно определение координат ПО осуществляется с использованием навигационной базы из М гидроакустических приемоответчиков (навигационных маяков) и координаты ПО определяются в прямоугольной системе координат с центром в определенной точке земного шара, координаты которой необходимо заранее определять.
Недостатком способа прототипа, как и упомянутого ранее аналога [1] является то, что использование навигационной базы из М гидроакустических приемоответчиков определяет существенные экономические затраты по изготовлению не менее трех необходимых комплектов навигационных приемоответчиков (навигационных маяков), их обслуживание и эксплуатацию.
Кроме того, поскольку морская навигация для определения положения кораблей, подводных лодок, и т.п. с большой дальностью плавания использует географическую систему координат с началом координат в центре Земли, для современных ПО с большой дальностью плавания использование прямоугольной системы координат нецелесообразно.
Отсутствие оперативного определения своих координат на борту объекта навигации в процессе решения им поставленных задач может ухудшить точность получаемых результатов.
Задачей изобретения является повышения оперативности получения ПО его географических координат и сокращение экономических затрат при решении ПО поставленных задач.
Технический результат заключается в разработке способа получения географических координат ПО по одному дрейфующему навигационному маяку, вместо трех и более при повышении оперативности и точности.
Для решения поставленной задачи в способ определения координат подводного объекта (ПО) основанный на излучении запросного сигнала гидроакустическим приемопередатчиком, размещенном на ПО, приема его и переизлучении приемоответчиком, размещенном на дрейфующем навигационном маяке (ДНМ), посредством которого измеряют временные интервалы распространения излученного ПО сигнала на ДНМ и обратно с последующим преобразованием его в дистанцию между ПО и приемоответчиком ДНМ, передаче географических координат ДНМ, определенных с помощью глобальной навигационной спутниковой системе (ГНСС), на ПО, определение координат ПО в прямоугольной системе координат, введены новые признаки, а именно: приемоответчик и приемопередатчик выполняют одноканальными, с приемопередатчика ПО, на котором установлена система с ультракороткой базой или короткой базой посылают запрос географических координат ДНМ широты ВД и долготы LД и одновременно производят определение дистанции D и пеленга α на ДНМ, затем с помощью спецвычислителя не менее чем с 32 разрядной сеткой, установленного на ПО, осуществляют пересчет географических координат широты ВД и долготы LД ДНМ в прямоугольные пространственные координаты X, Y, Z с началом координат в центре Земли, затем рассчитывают сферические широту ϕД и долготу λД ДНМ, на земной сфере, касающейся общеземного эллипсоида в точке нахождения ДНМ, по значению давления Р на глубине нахождения ПО, полученного с помощью датчика давления, установленного на ПО, в спецвычислителе производят пересчет давления Р в глубину Н нахождения ПО и дистанции D в центральный угол ϕ земной сферы, затем по сферическим координатам ДНМ ϕД и λД, центральному углу ϕ производят расчет сферических координат ПО широты ϕПО и долготы λПО и оценку точности полученного решения, затем по сферическим координатам ϕПО и λПО рассчитывают прямоугольные пространственные координаты ПО ХПО, YПО, ZПО и производят их пересчет в прямоугольные пространственные координат ПО ХПО, YПО, ZПО с началом координат в центре Земли по которым определяют в географические координаты широты ВПО и долготы LПО ПО.
Способ определения географических координат подводного объекта заключается в том, что на ПО с гидроакустической навигационной системой с короткой базой (ГАНС-КБ (SBL системы) или гидроакустической навигационной системой с ультра короткой базой (ГАНС-УКБ (USBL, иногда SSBL системы), определяющую пеленг на ДНМ и дистанцию до него дополнительно устанавливается датчик давления и спецвычислитель с не менее чем с 32 разрядной сеткой для расчета координат ПО и совместно с введением остальных новых признаков: предложенного способа расчета географических координат ПО с использованием глубины ПО, пеленга на ДНМ и координат ДНМ позволяет сократить количество ДНМ до одного и оперативно получать на борту ПО свои координаты.
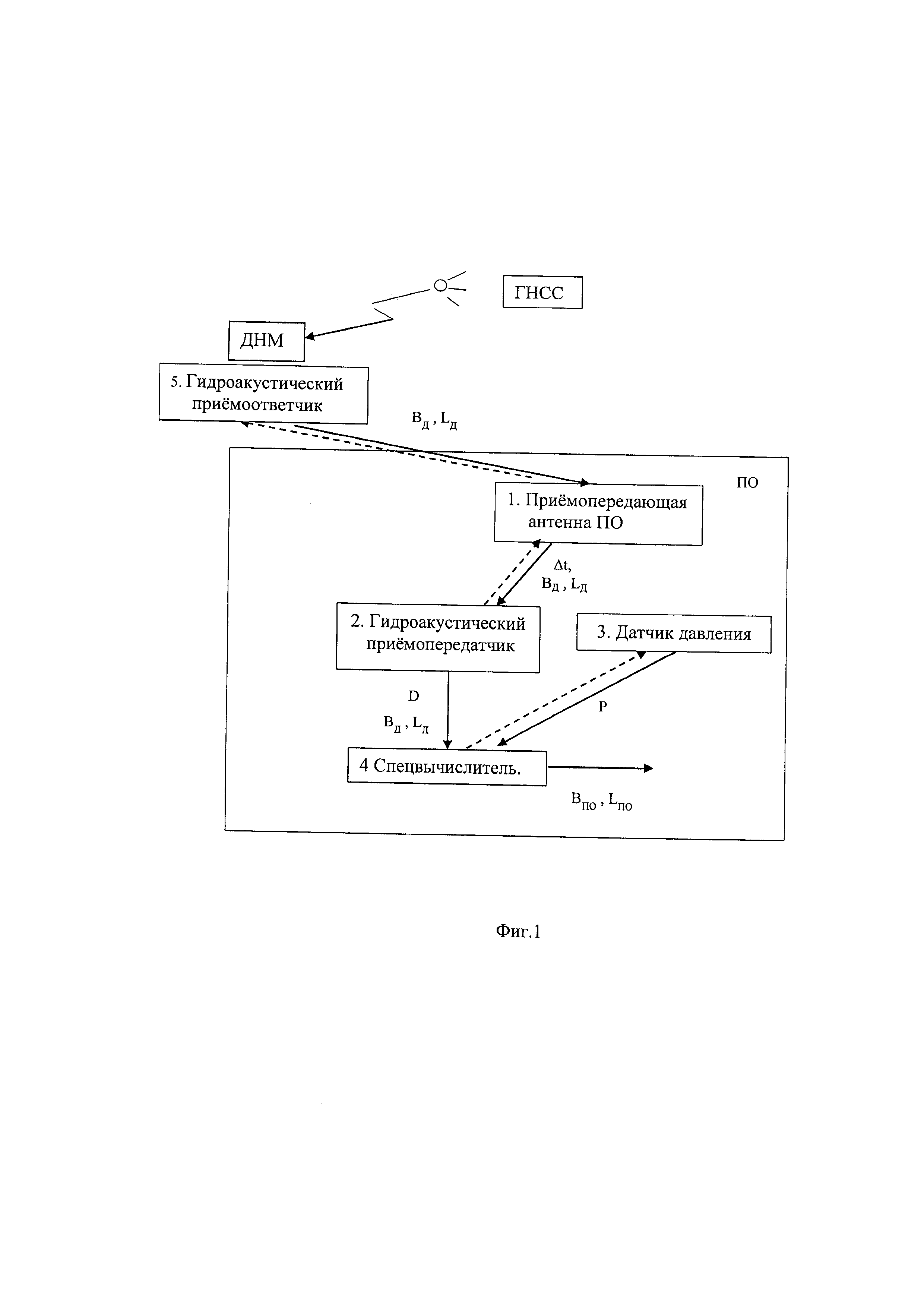
Сущность изобретения поясняется фиг. 1-6, при этом на фиг. 1 схематически изображена функциональная схема, реализующая способ. На фиг. 1 обозначены: сплошная линия представляет запросный сигнал; пунктирная линия - ответный сигнал; ГНСС - глобальная навигационная спутниковая система; ДНМ - дрейфующий навигационный маяк;. Δt - временной интервал; ВД, LД - географическая широта и долгота ДНМ соответственно; D - дистанция между ПО и ДНМ; α - пеленг на ДНМ; Р - давление на глубине нахождения ПО; ВПО, LПО - географическая широта и долгота ПО соответственно.
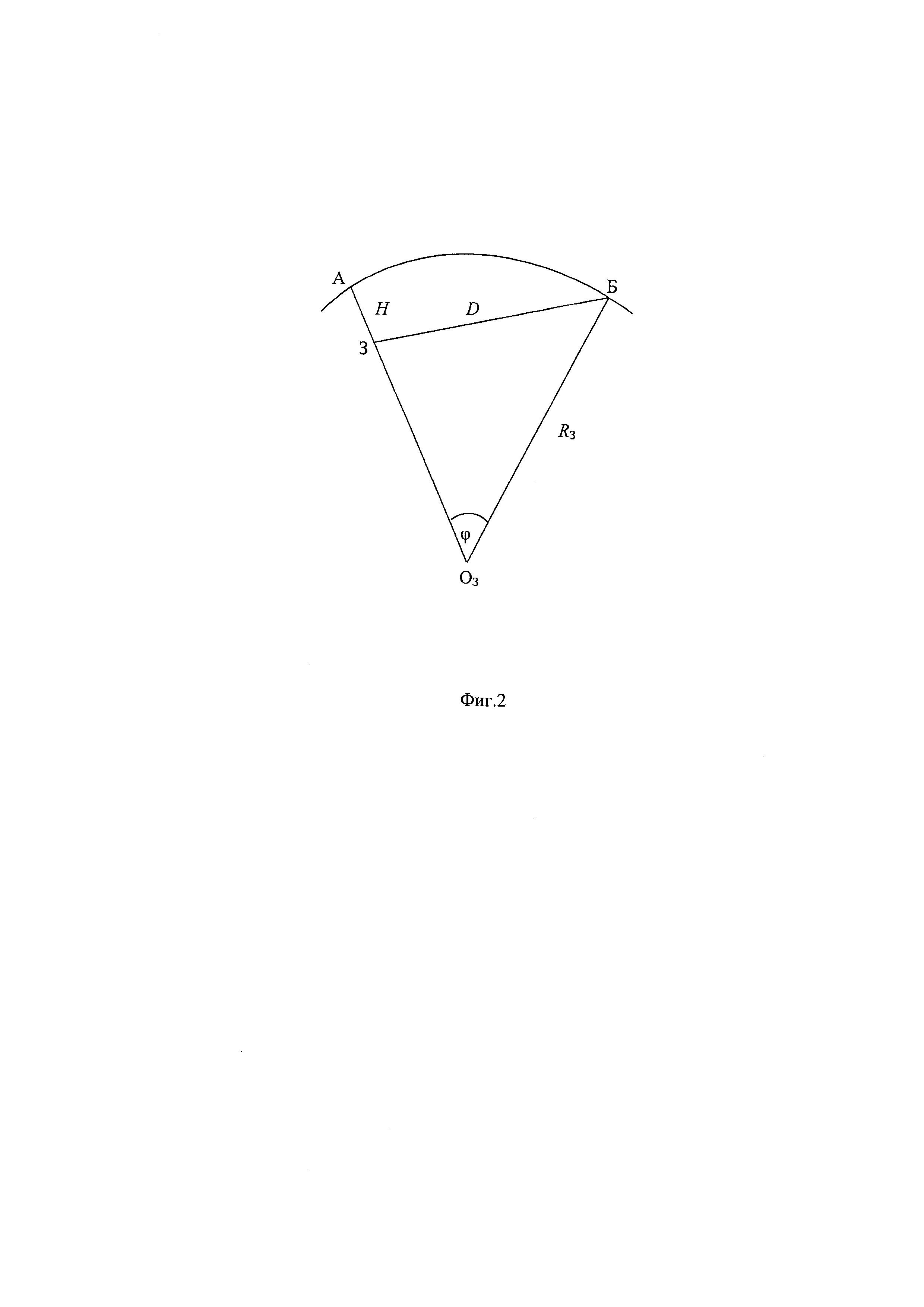
Фиг. 2 поясняет расчет центрального угла земной сферы ϕ между ПО и ДНМ, на фиг. 2 обозначены: ОЗ - центр земной сферы; Б - положение ДНМ; З - положение ПО; Н - глубина, на которой находится ПО; А - проекция положения ПО на земную сферу; Rз - радиус земной сферы.
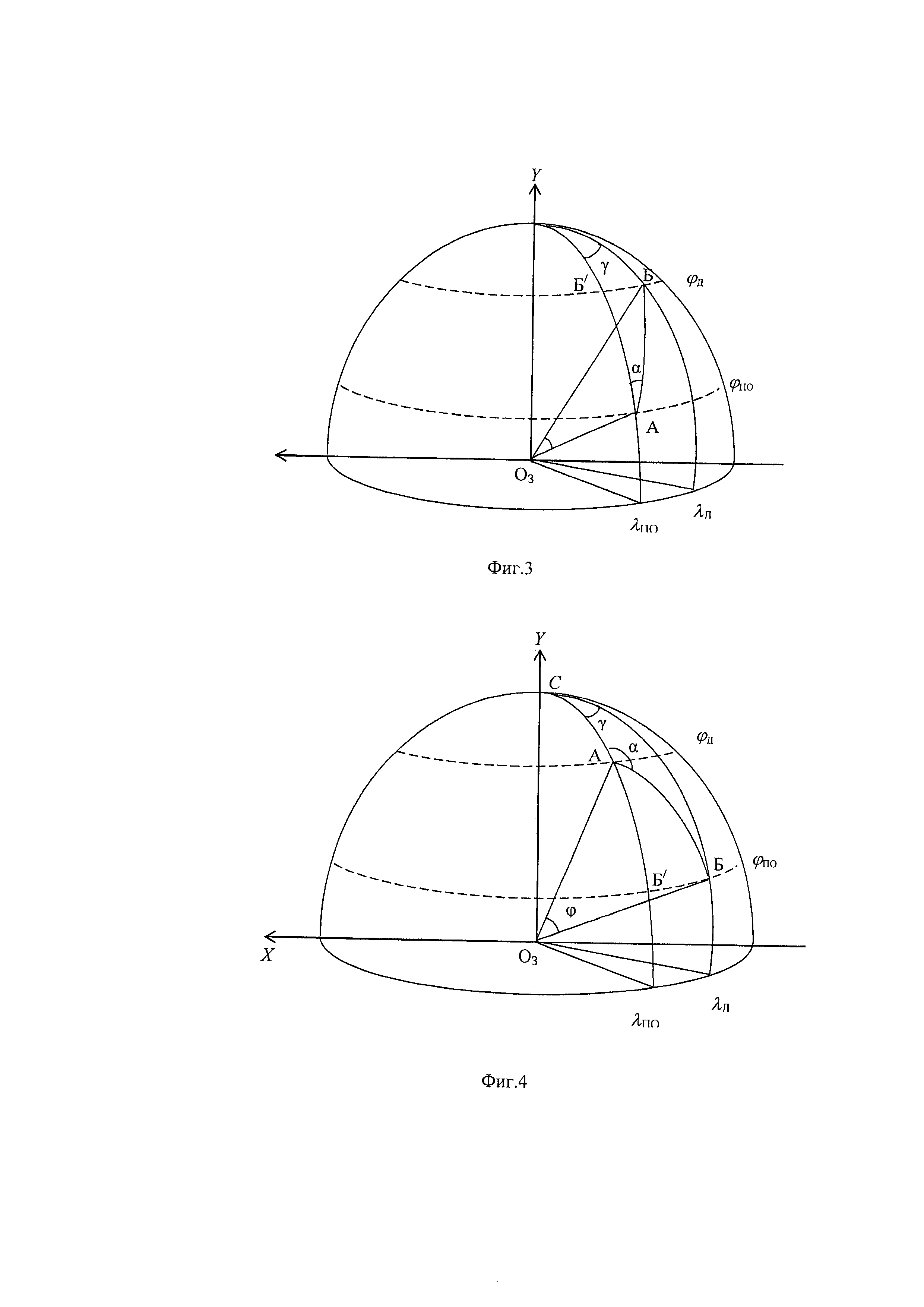
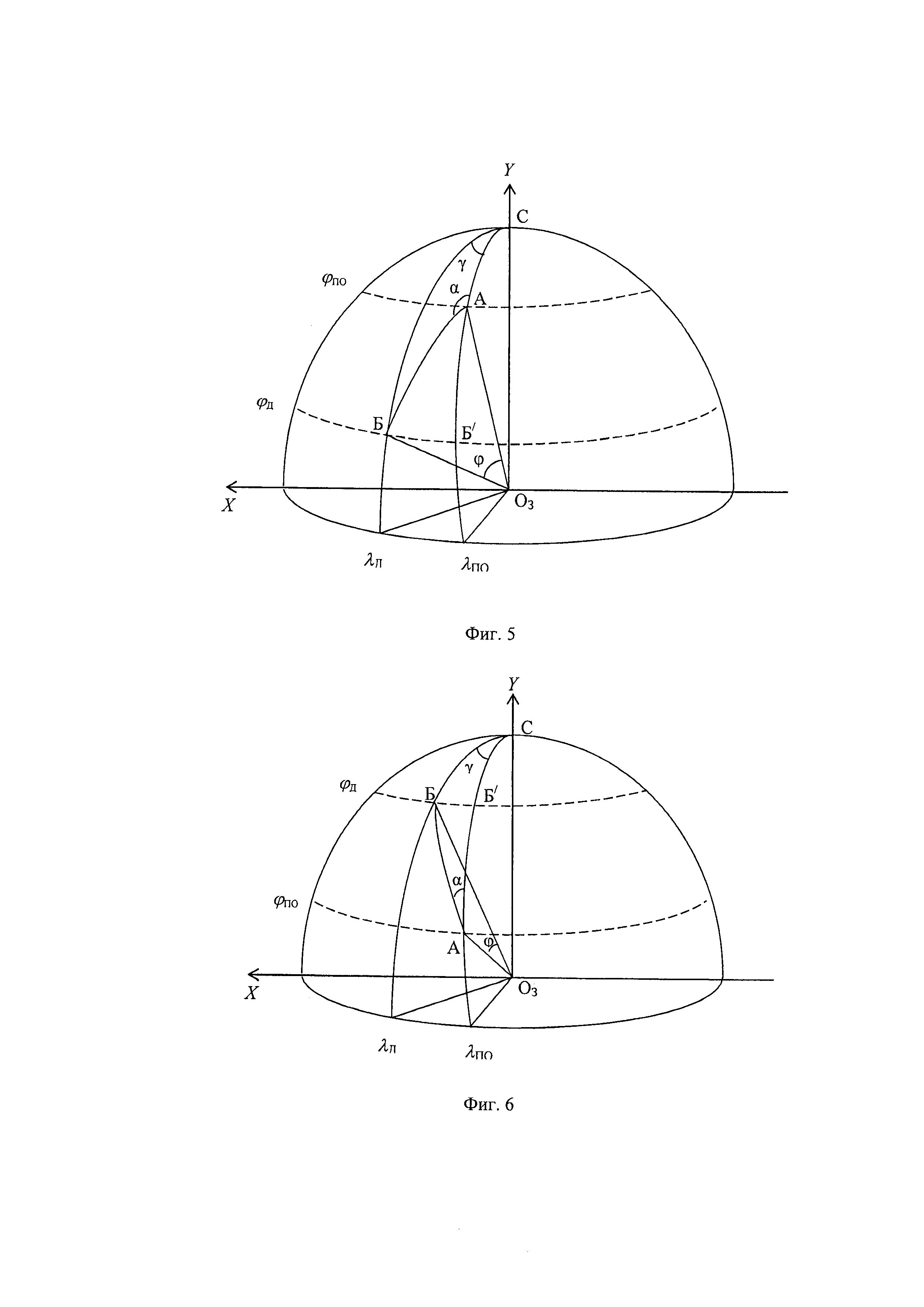
Фиг. 4-6 поясняют расчет сферических координат широты ϕПО и долготы λПО ПО по сферическим координатам широте ϕД и долготе λД ДНМ, центральному углу земной сферы ϕ и пеленга на ДНБ, на фиг. 4 приведено взаимное положение ПО и ДНМ в интервале углов 0≤αб≤90°, на фиг. 5 приведено взаимное положение ПО и ДНМ в интервале углов 90°<αб≤180°, на фиг. 5 приведено взаимное положение ПО и ДНМ в интервале углов 180°<αб≤270°, на фиг. 6 приведено взаимное положение ПО и ДНМ в интервале углов. 270°<αб<360°. На фиг. 4-6 обозначены: ϕД - географическая широта ДНМ; λД - географическая долгота ДНМ; ϕПО - географическая широта ПО; λПО - географическая долгота ПО; БС=90°-ϕД; АБ=ϕ; α - угол между меридианом и направлением на ДНМ.
В предлагаемом способе (фиг. 1) гидроакустический приемопередатчик 2 ПО через приемопередающую антенну 1 излучает акустический сигнал запроса, который принимает гидроакустический приемоответчик 5 ДНМ. Приемоответчик 5 ДНМ при приеме запросного сигнала излучает ответный сигнал, который принимает приемопередатчик 2 ПО и определяет временной интервал Δt между моментами времени излучения сигнала запроса и прихода ответного сигнала с географическими координатами ВД, LД ДНМ.
По временному интервалу Δt в приемопередатчике 2 рассчитывается дистанция D между ПО и ДНМ, которая вместе с координатами ВД, LД ДНМ передается в спецвычислитель 4.
В спецвычислителе 4 по алгоритму приведенному в ГОСТ Р 51794-2008 [3] осуществляется пересчет географических координат (широты ВД и долготы LД) ДНМ в прямоугольные пространственные координаты (X, Y, Z). Затем по прямоугольным координатам X, Y, Z рассчитываются сферические координаты ДНМ ϕД и λД по следующим формулам:

 λД∈[0°;360°],
λД∈[0°;360°],
 ϕД∈[-90°;90°], sign(ϕД)=sign(z)
ϕД∈[-90°;90°], sign(ϕД)=sign(z)
Спецвычислитель 4 опрашивает датчик давления 3 и по полученному давлению Р рассчитывается глубина Н нахождения ПО.

где ρ - плотность воды в районе нахождения ПО;
g - ускорение свободного падения.
На начальном этапе производится пересчет дистанции D в центральный угол ϕ земной сферы (фиг. 2).
В треугольнике ОЗБЗ по теореме косинусов [4]

Из (3) формула для расчета угла ϕ будет иметь вид (см. фиг. 2)

Для нахождения сферических координат ПО (широты ϕПО и долготы λПО) необходимо рассмотреть треугольники АБС и АББ/ на фиг. 3-6.
α - угол между меридианом и направлением на ДНМ, который равен:
α=αд при 0≤αД≤180°;
α=360°-αД при 180°<αД≤360°,
где αД - измеряемый пеленг на ДНМ.
По теореме синусов в треугольнике АБС [1]
Учитывая, что БС=Б'С=90°-ϕД и АБ=ϕ

Треугольник АББ' - сферический прямоугольный, в котором ББ'=γ.
По теореме Пифагора [1]
Если 0≤αД≤90° (фиг. 3), то


Если 90°<αД≤180° (фиг. 4), то


Если 180°<αД≤270° (фиг. 5), то


Если 270°<αД<360° (фиг. 6), то


При необходимости в спецвычислителе 4 может быть проведена оценка точности полученных сферических координат ПО. В соответствии с [5] ошибки определения координат ПО определяются следующими выражениями:


где
δλПО - ошибка определения долготы ПО; δϕПО - ошибка определения широты ПО; δD - ошибка определения наклонной дальности; δН - ошибка определения глубины; δα - ошибка определения пеленга; δλД - ошибка определения долготы ДНМ; δϕД - ошибка определения широты ДНМ.
Частные производные, входящие в выражения (15) и (16) находятся дифференцирование выражений (2)-(14).
Для ошибки по долготе ПО δλПО частные производные определяются следующими выражениями:





Для ошибки по долготе ПО δϕПО частные производные определяются следующими выражениями:




Знак в выражении (23) определяется значением угла αб.

Частные производные  и
и  определяются выражениями
определяются выражениями


После расчета сферических координат ПО широты ϕПО и долготы λПО и оценки ошибок определения долготы δλПО и широты δϕПО в спецвычислителе 4 по сферическим координатам ПО ϕПО, λПО, RЗ рассчитываются прямоугольные координаты

По алгоритму, изложенному в ГОСТ Р 51794-2008 [3], в спецвычислителе 4 по прямоугольным координатам X, Y, Z рассчитываются географические координаты ВПО, LПО ПО.
Таки образом географические координаты ПО получены автоматически, с использованием только одного ДНМ, что существенно сокращает время решения задачи, так как не требует развертывания прямоугольной системы координат и привязки ее к географической системе, при этом точность определения координат ПО повышается, так как исключаются ошибки привязки начала прямоугольной системы координат. Это позволяет считать, что заявленный технический результат достигнут.
Источники информации
1 Патент РФ №2365939, G01S 15/08, Способ навигации подводного объекта, дата публикации патента 27.08.2009.
2 Патент РФ №2444759, G01S, Способ навигации подводного объекта посредством гидроакустической навигационной системы, дата публикации патента 10.03.2012.
3. ГОСТ Р 51794-2008 «Системы координат. Методы преобразований координат определяемых точек»
4. А.А. Рывкин, А.З. Рывкин, Л.С. Хренов. Справочник по математике для учащихся-заочников средних специальных учебных заведений. М.: Высшая школа, 1964 г.
5. Дж. Тейлор. Введение в теорию ошибок. Пер. с англ. - М.: Мир, 1985 г. С. 272, ил.
Способ определения координат подводного объекта (ПО), основанный на излучении запросного сигнала гидроакустическим приемопередатчиком, размещенным на ПО, приеме его и переизлучении приемоответчиком, размещенным на дрейфующем навигационном маяке (ДНМ), посредством которого измеряют временные интервалы распространения излученного ПО сигнала на ДНМ и обратно с последующим преобразованием его в дистанцию между ПО и приемоответчиком ДНМ, передаче географических координат ДНМ, определенных с помощью глобальной навигационной спутниковой системы (ГНСС), на ПО, определение координат ПО в прямоугольной системе координат, отличающийся тем, что приемоответчик и приемопередатчик выполняют одноканальными, с приемопередатчика ПО, на котором установлена система с ультракороткой базой или короткой базой, посылают запрос географических координат ДНМ широты В и долготы L и одновременно производят определение дистанции D и пеленга α на ДНМ, затем с помощью спецвычислителя не менее чем с 32-разрядной сеткой, установленного на ПО, осуществляют пересчет географических координат широты В и долготы L ДНМ в прямоугольные пространственные координаты X, Y, Z с началом координат в центре Земли, затем рассчитывают сферические широту ϕ и долготу λ ДНМ, на земной сфере, касающейся общеземного эллипсоида в точке нахождения ДНМ, по значению давления Р на глубине нахождения ПО, полученного с помощью датчика давления, установленного на ПО, в спецвычислителе производят пересчет давления Р в глубину Н нахождения ПО и дистанции D в центральный угол ϕ земной сферы, затем по сферическим координатам ДНМ ϕ и λ, центральному углу ϕ производят расчет сферических координат ПО широты ϕ и долготы λ и оценку точности полученного решения, затем по сферическим координатам ϕ и λ рассчитывают прямоугольные пространственные координаты ПО Х, Y, Z и производят их пересчет в прямоугольные пространственные координаты ПО Х, Y, Z с началом координат в центре Земли, по которым определяют в географические координаты широты B и долготы L ПО.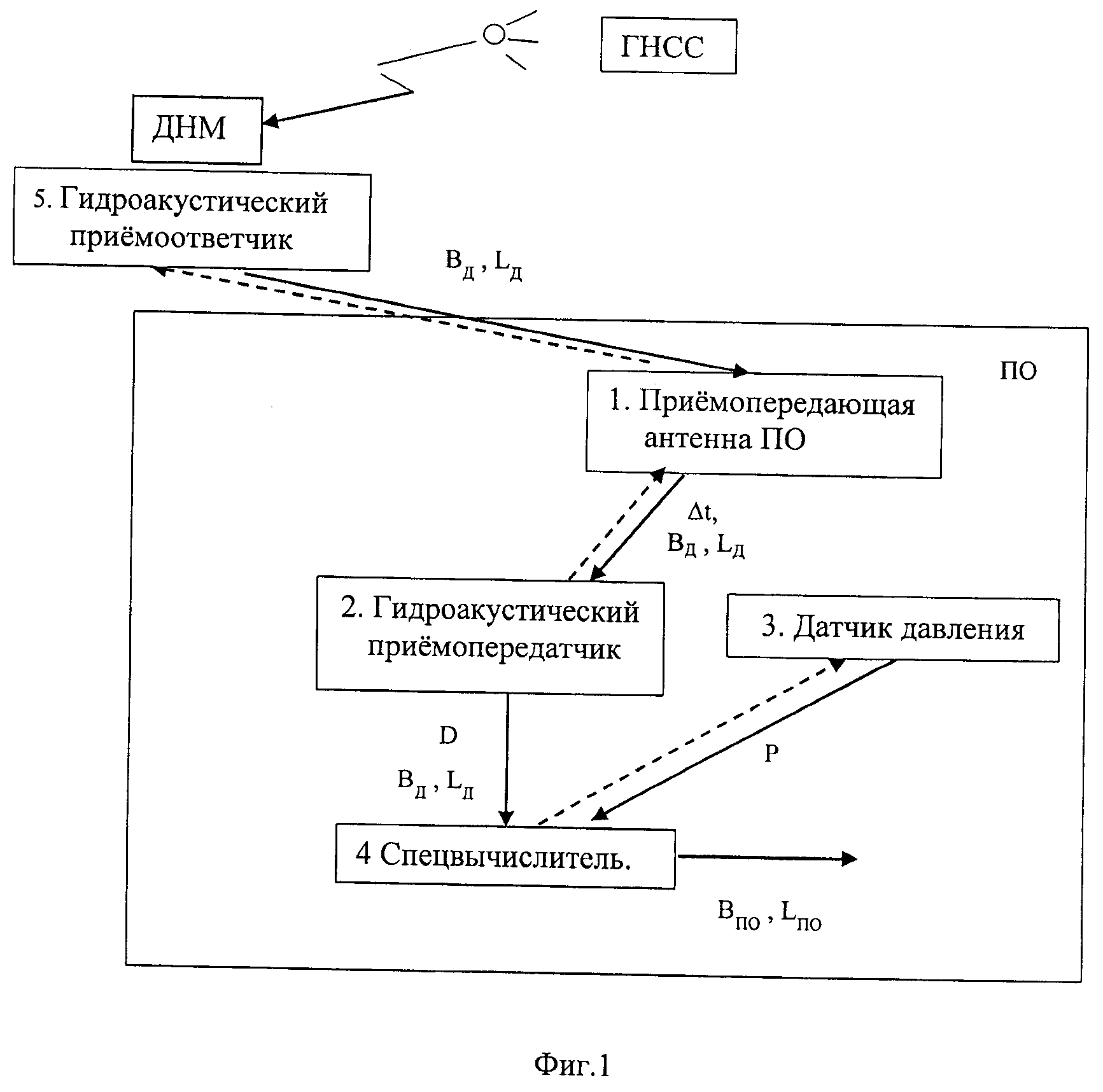
Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Активный гидролокатор
Мощный полупроводниковый резистор и способ его изготовления
Способ высокоточного координирования подводного комплекса в условиях подледного плавания
Способ послеоперационного прогнозирования пострезекционной печеночной недостаточности
Способ предоперационного прогнозирования пострезекционной печеночной недостаточности
Способ прогнозирования пострезекционной печеночной недостаточности в раннем послеоперационном периоде
Гидроакустическая система подводной навигации
Способ прогнозирования общей выживаемости у больных опухолью клатскина после хирургического лечения
Способ дооперационного определения вероятности наличия карциноматоза брюшины у больных воротной холангиокарциномой
Способ определения координат подводного объекта гидроакустической системой подводной навигации с юстировочным маяком
Способ определения выживаемости у больных воротной холангиокарциномой после хирургического лечения

