Результат интеллектуальной деятельности: СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения навигационных гидроакустических комплексов освещения ближней обстановки.
Методы обработки гидролокационной информации известны из литературы, в которой приведены гидролокаторы, предназначенные для обнаружения целей различного класса. (А.Н.Яковлев, Г.П.Каблов. «Гидролокаторы ближнего действия». Судостроение. 1983 г., Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев «Корабельная гидроакустическая техника», Спб., «Наука», 2004 г.), где рассмотрены их структурные схемы и способы обработки гидролокационной информации.
Способы обработки гидролокационной информации состоят в том, что антенна гидролокатора в режиме обзора излучает акустические зондирующие сигналы в горизонтальной плоскости. В режиме приема осуществляется электронное сканирование диаграммы направленности в горизонтальной плоскости, прием сигнала, обработка сигнала и вывод информации на индикатор для принятия решения оператором.
Недостатком этих способов является то, что классификация осуществляется оператором по информации, выводимой на индикатор. Задача классификации начинает решаться только после того, как обнаружена цель оператором, после чего излучаются дополнительные сигналы для измерения классификационных признаков.
Известна система автоматической классификации гидролокатора ближнего действия по патенту РФ №2465618, который содержит антенну, коммутатор приема-передачи и задающий генератор, индикатор, процессор цифровой многоканальной обработки и обнаружения сигналов, блок управления задачами классификации, процессор классификации, блок формирования табло результатов, блок формирования индикаторных картин по объекту классификации. Автоматический классификатор начинает работать после обнаружения цели оператором и выдаче команды блоком управления на решение задачи классификации по выбранной цели и по информации, полученной при последующих зондирующих сигналов.
Недостатком такого способа обработки гидролокационной информации является то, что для задач обнаружения используются свои критерии при обработке гидролокационной информации, которые должны обеспечивать обнаружения эхосигнала с заданными вероятностями правильного обнаружения и вероятностями ложной тревоги. Для задач классификации нужно обнаруживать необходимые классификационные признаки в своей системе обработки. Как правило, при решении задач обнаружения эти классификационные признаки нельзя выделить, поскольку сама процедура обработки гидролокационной информации при обнаружении цели отличается от процедуры обработки гидролокационной информации при классификации цели, и совместная классификационная информация часто бывает несопоставимой и неоднозначной.
Известна навигационная гидроакустическая станция освещения ближней обстановки по патенту РФ №2225991. Станция содержит: приемо-передающую антенну, генератор, блок управления, коммутатор приема передачи с трактом предварительной обработки, первую цифровую вычислительную машину, соединенную с выходом тракта предварительной обработки интерфейсами, последовательно соединенную с первой вторую цифровую вычислительную машину совместно с монитором, тракт измерения скорости звука, цифроаналоговый тракт прослушивания и систему классификации целей. Классификация при работе этой станции осуществляется оператором по отображаемой на индикаторе информации. Наиболее подробно способ обработки гидролокационной информации при обнаружении эхосигнала по патенту РФ №2225991 также представлен в Трудах 8 международной конференции «Прикладные технологии гидроакустики и гидрофизики». СПб, «Наука», 2006 г., стр.460-465 в статье А.А.Войтова, Б.М.Казакова, Ю.А.Корнеева «Реализация алгоритмов автоматической обработки информации в гидролокаторах освещения ближней обстановки». Этот способ является наиболее близким к предлагаемому способу по количеству общих признаков и выбран в качестве прототипа.
Способ-прототип содержит излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности, многоканальную цифровую обработку, последовательную по времени когерентную обработку, последовательное прореживание временных отсчетов с выбором максимумов, оценку среднего значения набора цифровых отсчетов, оценку дисперсии, центрирование набранного массива отсчетов и нормирование набранного массива отсчетов, адаптивное формирование порогов, обнаружение эхосигналов и отображение гидролокационной информации, классификацию выбранной цели по последующим посылкам, управление и предоставление информации на индикатор.
Недостатком такой процедуры является то, что классификация проводится только после того, как цель будет обнаружена оператором, для чего используется дополнительное излучение зондирующих сигналов. Это обусловлено несопоставимостью результатов измерений при обнаружении эхосигналов от цели и результатов измерений при классификации эхосигналов от цели за счет разной процедуры обработки.
Задачей настоящего изобретения является совмещение процедур обнаружения и классификации путем введения единой последовательности обработки входной информации гидролокатора, которая позволит одновременно обнаруживать цель и классифицировать обнаруженную цель.
Технический результат изобретения заключается в повышении эффективности навигационной гидроакустической станции освещения ближней обстановки путем сокращения времени на автоматическое обнаружение цели и автоматическую классификацию автоматически обнаруженной цели по первой посылке.
Для обеспечения указанного технического результата в способ, содержащий излучение зондирующего сигнала, прием отраженного эхосигнала, формирования статического веера характеристик направленности, формирование цифрового массива данных с выхода тракта когерентной обработки по каждому пространственному каналу, последовательный вывод цифровых отсчетов на индикатор, определение порога автоматического обнаружения; введены новые признаки, а именно: вывод цифровых отсчетов на индикатор осуществляют по правилу А=Аотсч/(Г-К), где А - амплитуда отсчета, выводимая на индикатор, Аотсч - амплитуда измеренного исходного цифрового отсчета, Г - параметр, определяемый операторам как глубина регулировки усиления, К - номер цикла обработки, выбирают порог автоматического обнаружения из условия минимума пропуска эхосигнала от цели, формируют общий цифровой массив данных с выхода тракта когерентной обработки по всем пространственным каналам от момента излучения до момента достижения зондирующим сигналом установленной шкалы дистанции, определяют отсчеты, превысившие порог и временные положения отсчета Т, первым превысившего порог, определяют номер пространственного канала М, формируют строб из общего цифрового массива по И пространственным каналам, средний канал из которых есть измеренный канал М, и во временном окне, равном Н циклам набора временной реализации по каждому выбранному пространственному каналу, автоматически определяют классификационные признаки и автоматически принимают решение о классе цели в выбранном стробе, выводят результат классификации на индикатор с указанием номера цели, измеренных координат по М и Т, классификационных признаков и класса обнаруженной цели, при очередном обнаружении превышения порога процедуру повторяют в стробе по вновь выбранным координатам до окончания шкалы дистанции и по совокупности всех обнаруженных целей формируют банк классификации, где по координате М, автоматически определяют пеленг на цель, а по координате Т автоматически определяют дистанцию до цели, а размеры строба во временном окне Н и в пространственном окне И устанавливаются оператором в зависимости от шкалы дистанции и числа обнаруженных целей.
Сущность предлагаемого способа заключается в следующем.
Процедуры обработки гидролокационной информации в существующих системах обнаружения определяют наличие эхосигнала от объекта по величине превышения выбранного порога амплитудой эхосигнала от объекта, который выбирается исходя из отношения сигнал/помеха. Таким образом, критерием является превышение измеренного уровня эхосигнала над измеренным уровнем помехи. Задача классификации решается путем выделения всех классификационных признаков, которые характеризуют цель своим наличием или отсутствием. В цифровых системах обработки необходимо прореживание входной информации, чтобы ограничить объемы передаваемых массивов для отображения, и применяется специальная обработка, связанная с нормированием и центрированием для обеспечения единообразных форматов представления цифровой информации. Как правило, нормирование и центрирование, проводимое последовательно по каждому набору цифровых отсчетов, пагубно сказывается на сохранении исходного соотношения между минимальными и максимальными амплитудами эхосигналов от отдельных отражателей на всей длительности эхосигнала от цели, искажается исходная входная информация, что ухудшает достоверность классификации при выборе порогов. Поэтому нельзя использовать центрирование и нормирование в последовательных наборах цифровых отсчетов в задачах одновременного обнаружения и классификации. Необходимо сохранить исходное соотношения между отдельными составляющими сигнала во всем динамическом диапазоне за время всего цикла излучения-приема по всей шкале дистанции. Однако после излучения имеет место большой уровень объемной реверберации, амплитуда сигнала которой будет воздействовать на индикатор и создавать яркую засветку экрана, что затрудняет работу оператора и не несет дополнительной информации. Для устранения этого вводится цифровая регулировка усиления, которая уменьшает амплитуду входных отсчетов сразу после излучения. Глубину регулировки усиления выбирают в зависимости от мощности излучения, длительности зондирующего сигнала, что связано с требуемой дальностью обнаружения и особенностями района работы, в частности глубиной и строением грунта. Поэтому вводится правило вывода цифровых отсчетов на индикатор после начала приема входной информация. Амплитуда выводимого отсчета А=Аотсч/(Г-К), где А амплитуда отсчета, выводимая на индикатор, Аотсч - амплитуда измеренного исходного цифрового отсчета, Г - параметр, определяемый оператором как глубина регулировки усиления, К - номер цикла обработки. Таким образом, с каждым циклом обработки, т.е. с увеличением дистанции, глубина регулировки усиления уменьшается. Максимальное уменьшение амплитуды сигнала происходит сразу после излучения. Как правило, это не оказывает существенного влияния на дальнейшую процедуру обработки. Величины Г и К можно сделать регулируемыми параметрами и устанавливать в зависимости от условий работы. Величину порога выбирают из условия обеспечения минимального значения вероятности пропуска эхосигнала (А.Н.Яковлев, Г.П.Каблов «Гидролокаторы ближнего действия». Судостроение, Л., 1983 г., стр.100-120). Это повышает вероятность ложной тревоги, которая в дальнейшем снижается за счет решения задачи классификации. По выбранному превышению определяют пространственный канал М, в котором произошло превышение амплитуды над порогом, амплитуду отсчета и время отсчета Т, по которым и формируется строб по времени И и по пространству Н для решения задачи классификации отсчета, превысившего порог. Для классификации выбирают из имеющегося всего массива тот массив, который заключен в выбранном стробе по конкретному измеренному значению М и Т. Выбранный массив в стробе передают для решения задачи классификации. После решения задачи классификации по выбранному массиву подключают решение задачи классификации по следующему превышению порога в другом выделенном стробе во всем динамическом диапазоне возможного существовании сигнала. Размеры строба оператор может изменить в зависимости от числа обнаруженных целей. Если число эхосигналов большое, а возможности для обработки ограничены, то размеры строба И и Н могут быть уменьшены. Если обнаруженная цель представляет особый интерес, то размер строба может быть увеличен для длительного слежения за целью и получения информации в процессе длительного слежения. По результатам классификации каждой цели измеряют классификационные признаки, которые заносят в табло результатов и формируют пространственное и временное отображение классифицируемой цели. Все это передается в банк классификации, а оператору отображают наиболее опасные цели.
Известно, что низкий порог обнаружения снижает вероятность пропуска цели, но увеличивает вероятность ложной тревоги, а система классификации своей работой снижает вероятность ложной тревоги, выделяет необходимые классификационные признаки, которые характеризуют и объект и помеху и принимает решение по обнаруженному превышению порога.
Таким образом, обеспечивается задача автоматического обнаружения эхосигнала от цели, которая минимизирует вероятность пропуска эхосигнала, и задача автоматической классификации автоматически обнаруженных эхосигналов практически по одной посылке для определенной группы классов.
Сущность изобретения поясняется фиг.1, на которой приведена блок-схема устройства, реализующая рассматриваемый способ.
Антенна 1 через коммутатор 2 приема-передачи, систему 5 формирования характеристик направленности (СФХН) и систему 6 многоканальной обработки соединена со спецпроцессором 7. Спецпроцессор 7 содержит последовательно соединенные: блок 8 формирования временной регулировки усиления по входным отсчетам и вывод на индикатор, блок 9 формирования всего массива отсчетов, блок 10 выбора порога и обнаружения по превышению порога, блок 11 формирования строба классификации по всем обнаруженным объектам, систему 12 классификации, принятия решения и определения координат, блок 13 формирования банка классификации, отображения и управления. Блок 13 соединен с первым входом индикатора 14, на второй вход которого поступает сигнал от оператора из блока 15 принятия решения оператором. Второй выход блока 8 соединен с третьим входом индикатора 14. Второй выход блока 13 соединен через задающий генератор 4, усилитель мощности 3 со вторым входом коммутатора приема-передачи 2.
Предложенный способ с помощью устройства фиг.1 реализуется следующим образом.
С выхода блока 13 формирования банка классификации, принятия решения и управления поступает сигнал на задающий генератор 4. Сформированный зондирующий сигнала от задающего генератора 4 через усилитель мощности 3 поступает на коммутатор приема-передачи 2, передается на антенну 1 и излучается в водную среду. Задающий генератор, усилитель мощности и коммутатор приема-передачи являются известными устройствами, которые используются в патенте РФ №2225991 от 24.12.2001 г. и могут быть выполнены, например, по схеме, стр.39-41, Колчеданцев А.С. «Гидроакустические станции», Л., Судостроение, 1982 г.
Отраженный эхосигнал принимается антенной 1 через коммутатор 2 и через систему 5 формирования характеристики направленности (СФХН) поступает на вход системы 6 многоканальной обработки. Антенна и система формирования характеристик направленности являются известными устройствами, рассмотренными, например, в Л.В.Орлов, А.А.Шабров. «Гидроакустическая аппаратура рыбопромыслового флота», Л., Судостроение, 1987 г., стр.116 или Смарышев М.Д. Добровольский Ю.Ю. «Гидроакустические антенны», Л., Судостроение, 1984 г. и используются в патенте РФ №2225991 от 24.12.2001 г.
С выхода каждого канала СФХН сигнал поступает на вход системы 6 многоканальной обработки, где происходит оптимальная обработка принятых эхосигналов. Система многоканальной обработки является известным устройством, приведенным, например, в В.С.Бурдик. «Анализ гидроакустических систем», Л., Судостроение, 1988 г., стр.365.
В современных гидроакустических комплексах СФХН и системы многоканальной обработки реализуются с использованием цифровой вычислительной техники на спецпроцессорах, как это реализовано в патенте РФ №2225991 от 24.12.2001 г.
С выхода системы 6 многоканальной обработки цифровые отсчеты последовательно по каждому каналу поступают в спецпроцессор 7, основной задачей которого является обнаружение объектов, отображение, измерение параметров и классификацию. Сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов (см. Ю.А.Корякин С.А.Смирнов Г.В.Яковлев. «Корабельная гидроакустическая техника», СПб., Наука, 2004 г., стр.164-176, стр.278-295). В процессоре реализуются все блоки предлагаемого устройства.
В блоке 8 формируется временная регулировка усиления по входным отсчетам и осуществляется вывод на индикатор последовательного входного цифрового массива. Весь массив отсчетов с выхода многоканальной системы обработки последовательно через блок 8 передается в блок 9, где запоминается от начала излучения до окончания приема. По цифровым отсчетам первого цикла по всем пространственным каналам определяется порог в блоке 10 и сравнивается последовательно со всеми цифровыми отсчетами массива блока 9. Определяются отсчеты, превысившие порог, определяется их амплитуда, время и номер пространственного канала, где произошло превышение порога, которые передаются в блок 11, где формируется строб по всем обнаруженным объектам. Из блока 9 выбираются массивы, принадлежащие обнаруженному объекту в выделенном стробе, и последовательно передаются в блок 12 на классификацию. В системе 12 происходит выделение классификационных признаков и принятие решения о классе обнаруженного объекта в выбранном стробе. В этой же системе происходит определение координат объекта. Со всеми измеренными признаками и выработанным решением полученные данные передаются в блок 13 формирования банка классификации, где присваиваются номера целям и формируется массив отображения результатов классификации на индикаторе.
Система классификации, принятия решения, определения координат может быть выполнена, например, по патенту РФ 2465618. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, где производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также классификацию и принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п/р Оппенгейма, М., Мир, 1980 г. и см. Ю.А.Корякин С.А.Смирнов Г.В.Яковлев. «Корабельная гидроакустическая техника», СПб., Наука, 2004 г., стр.164-176, стр.278-295.
Таким образом, используя последовательную процедуру обработки поступающих цифровых отсчетов можно обнаруживать эхосигналы, превысившие порог, который обеспечивает минимальную вероятность пропуска эхосигнала от цели и по первой же посылке автоматическую классификацию обнаруженных целей и автоматическое измерение координат, и предоставлять все эти данные на индикатор по мере обнаружения превышения порога.
Способ обработки гидролокационной информации, содержащий излучение зондирующего сигнала, прием отраженного эхосигнала, формирование статического веера характеристик направленности, формирование цифрового массива данных с выхода тракта многоканальной обработки по каждому пространственному каналу, последовательный вывод цифровых отсчетов на индикатор, определение порога автоматического обнаружения, отличающийся тем, что вывод цифровых отсчетов на индикатор осуществляют по правилу А=А/(Г-К), где А - амплитуда отсчета, выводимая на индикатор, А - амплитуда измеренного исходного цифрового отсчета, Г - параметр, определяемый оператором как глубина регулировки усиления, К - номер цикла обработки, выбирают порог автоматического обнаружения из условия минимума пропуска эхосигнала от цели, формируют общий цифровой массив данных с выхода тракта когерентной обработки по всем пространственным каналам от момента излучения до момента достижения зондирующим сигналом установленной шкалы дистанции, определяют отсчеты, превысившие порог, и временные положения отсчета Т, первым превысившего порог, определяют номер пространственного канала М, формируют строб из общего цифрового массива по И пространственным каналам, средний канал из которых есть измеренный канал М, и во временном окне, равном Н циклам набора временной реализации по каждому выбранному пространственному каналу, автоматически определяют классификационные признаки и автоматически принимают решение о классе цели в выбранном стробе, выводят результат классификации на индикатор с указанием номера цели, измеренных координат по М и Т, классификационных признаков и класса обнаруженной цели, при очередном обнаружении превышения порога процедуру повторяют в стробе по вновь выбранным координатам до окончания шкалы дистанции и по совокупности всех обнаруженных целей формируют банк классификации, где по координате М автоматически определяют пеленг на цель, а по координате Т автоматически определяют дистанцию до цели, а размеры строба во временном окне Н и в пространственном окне И устанавливаются оператором в зависимости от шкалы дистанции и числа обнаруженных целей.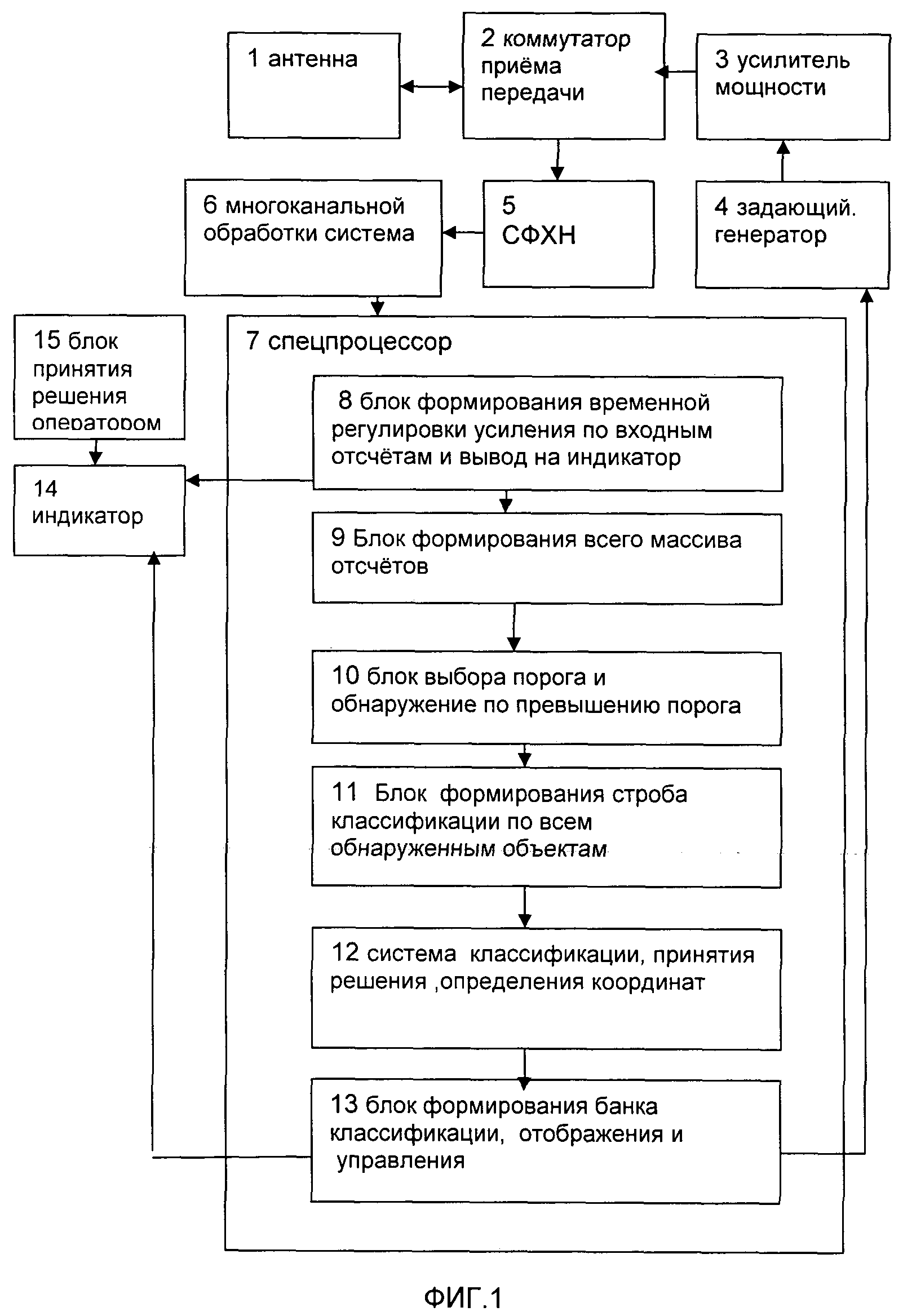
Способ классификации целей, адаптированный к гидроакустическим условиям
Способ определения глубины погружения объекта
Способ измерения скорости звука по трассе
Система автоматического обнаружения и классификации гидролокатора ближнего действия
Способ обнаружения объекта и измерения его параметров
Способ определения скорости звука
Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Способ классификации эхо-сигнала гидролокатора
Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели
Активный гидролокатор
Способ обработки гидролокационной информации
Способ измерения скорости движения цели гидролокатором
Способ обработки гидролокационной информации
Способ определения глубины погружения объекта
Способ классификации эхо-сигнала гидролокатора
Гидролокационный способ обнаружения объекта и измерения его параметров
Способ обнаружения шумящих в море объектов
Способ обнаружения шумящих в море объектов

