Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ГИДРОЛОКАТОРОМ ПАРАМЕТРОВ ВЫТЕКАЮЩЕГО ГАЗА ИЗ ТРУБЫ ПОДВОДНОГО ГАЗОПРОВОДА
Вид РИД
Изобретение
Настоящее изобретение относится к области гидролокации и предназначено для измерения объема вытекающего газа из газопровода гидролокатором.
В настоящее время большое распространение получили газопроводы, которые прокладываются на больших расстояниях под водой. Они могут располагаться как по дну морей, так и в подводном положении в плавучем состоянии на некоторой глубине. В процессе эксплуатации возникают ситуации, которые могут нарушить уплотнение между трубами, что приведет к образованию отверстия, из которого будет происходить утечка газа. Обнаружить утечку газа можно по снижению давления в магистрали. Однако это не всегда возможно, поскольку давление в системе зависит от потребления, которое практически всегда является случайным и зависит от случайности включения и отключения источников потребления. Обнаружить утечку газа с поверхности воды затруднительно, поскольку на поверхности моря будут наблюдаться газовые пузыри, характер которых будет маскироваться волнующейся водной массой. Обнаружить утечку газа можно и с использованием многолучевых эхолотов, которые работают непосредственно по дну и по известному местоположению газового трубопровода. (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-исследовательские средства», СПб., 2009 г. Изд. «ЛЭТИ», стр. 89-113), однако это требует точного знания положения трубопровода на дне, что связано с большими предварительными работами. Можно использовать гидролокаторы бокового обзора типа «Гидра» (Скнаря А.В., Трусилов В.Т., Седов М.В. Применение гидролокаторов бокового обзора для решения задач безопасности судоходства и экологического мониторинга. Специальная техника, №2, 2003 г.). Как правило, эти гидролокаторы являются буксируемыми и имеют дистанцию обнаружения порядка сотен метров, что также ограничивает возможности мониторинга состояния трубопроводов.
Наиболее близким аналогом, к предложенному техническому решению, является патент РФ №2527136 на «Способ измерения глубины погружения объекта гидролокатором», который определяет местоположение источника газовой течи. Способ содержит излучение зондирующего сигнала, прием эхо-сигнала статическим веером характеристик направленности, многоканальную обработку по всем каналам, в которых обнаружен эхо-сигнал, превысивший порог в каждом канале, определение момента времени начала эхо-сигнала Тмин и момент времени окончания эхо-сигнала  , определение дистанции начала эхо-сигнала
, определение дистанции начала эхо-сигнала  определение дистанции до окончания эхо-сигнала
определение дистанции до окончания эхо-сигнала  , и определение глубины местоположения начала эхо-сигнала по формуле
, и определение глубины местоположения начала эхо-сигнала по формуле  , где Н - глубина местоположения начала газовой пелены, С - скорость распространения звука в районе работы.
, где Н - глубина местоположения начала газовой пелены, С - скорость распространения звука в районе работы.
Недостатком этого способа является невозможность определения объема вытекающего газа. Это связано с тем, что газовое облако, поднимаясь вверх, расширяется и образует в пространстве конус, верхняя граница которого определяется глубиной погружения источника газовой течи и скоростью истекания газа.
Задачей изобретения является получение полной информации о параметрах газовой течи.
Технический результат предлагаемого способа заключается в определении объема выходящего газа и определения параметров вертикально распределенной пелены пузырей.
Для обеспечения указанного технического результата в известный способ измерения глубины погружения объекта, содержащий излучение зондирующего сигнала, прием эхо-сигнала от газовой течи в трубопроводе многоканальной антенной со статическим веером характеристик направленности и измерение дистанции до газовой течи, обнаружении эхо-сигналов, превысивших порог в каждом канале, определение минимального момента времени начала эхо-сигнала от пелены пузырей Тмин и момента времени конечного положения эхо-сигнала  , эхо-сигнала в каждом канале, выбор канала с максимальным временем задержки Тмакс, выбор канала с минимальным временем задержки Тмин, вычисление дистанции по началу эхо-сигнала от пелены пузырей
, эхо-сигнала в каждом канале, выбор канала с максимальным временем задержки Тмакс, выбор канала с минимальным временем задержки Тмин, вычисление дистанции по началу эхо-сигнала от пелены пузырей  , вычисление дистанции по окончанию эхо-сигнала от пелены пузырей
, вычисление дистанции по окончанию эхо-сигнала от пелены пузырей  , введены новые признаки, а именно определяют дистанцию до начала отражения от дна (донной реверберации) Древ в пространственном канале с максимальным временем задержки Тмакс, определяют глубину дна с помощью эхолота Ндна, определяют угловое положение источника газовой течи
, введены новые признаки, а именно определяют дистанцию до начала отражения от дна (донной реверберации) Древ в пространственном канале с максимальным временем задержки Тмакс, определяют глубину дна с помощью эхолота Ндна, определяют угловое положение источника газовой течи  , определяют глубину погружения источника газовой течи как Нист=ДконcosQ°, определяют горизонтальное расстояния до источника газовой течи Дгор=ДконsinQ°, определяют радиус каверны газовой течи на поверхности Rкав=Дгор-Дмин, а объем вытекающего газа из источника определяем по формуле:
, определяют глубину погружения источника газовой течи как Нист=ДконcosQ°, определяют горизонтальное расстояния до источника газовой течи Дгор=ДконsinQ°, определяют радиус каверны газовой течи на поверхности Rкав=Дгор-Дмин, а объем вытекающего газа из источника определяем по формуле:

Поясним достижение указанного технического результата и существо предлагаемого технического решения.
При нарушении герметичности трубопровода происходит выход газа, который образует пелену пузырей. При работе гидролокатора можно будет получить эхо-сигнал от пелены пузырей, образующейся при движении пузырей с глубины на поверхность. Такой отражатель имеет хорошо развитую вертикальную структуру, поскольку пузыри поднимаются вертикально вверх и увеличиваются в объеме, что приводит к расширению газового облака у поверхности. Поскольку этот объект имеет большую протяженность в вертикальной и горизонтальной плоскости, то имеется возможность оценить объем вытекающего газа из газопровода с использованием гидролокатора на значительном расстоянии.
В монографии «Физические основы подводной акустики» под ред. Мясищева В.И., изд. Сов. радио, М., 1955 г., стр. 604, рассмотрены вопросы отражения акустической энергии от отдельных пузырей и от пелены пузырей. Размеры пузырей зависят от глубины их нахождения, поскольку давление в месте установки газопровода большое, то и диаметр пузыря будет маленьким, так как он будет сжат гидростатическим давлением и пространственная протяженность пелены пузырей будет мала. По мере всплытия диаметр пузыря будет увеличиваться, и размеры пузырькового облака также будут увеличиваться по пространству.
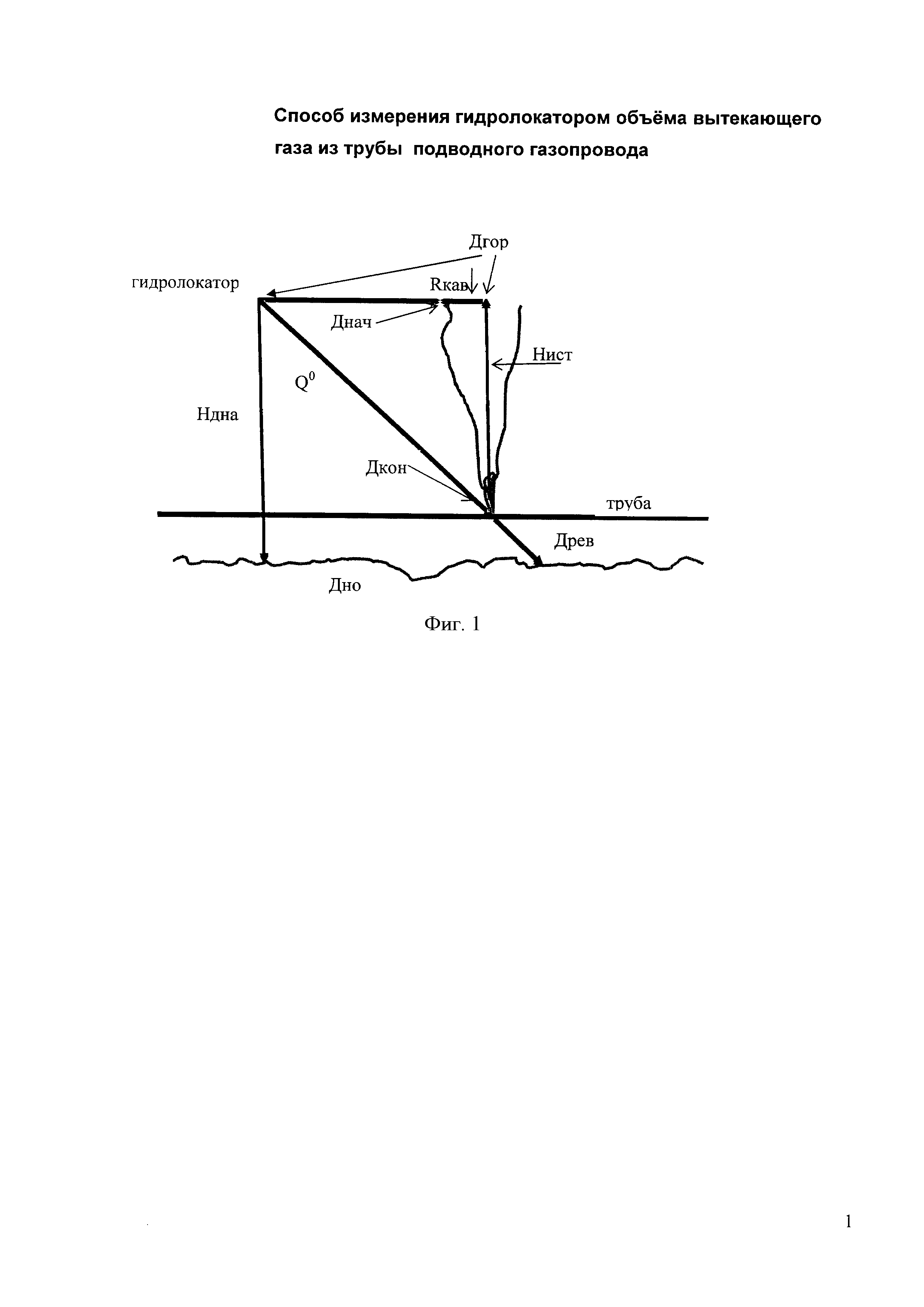
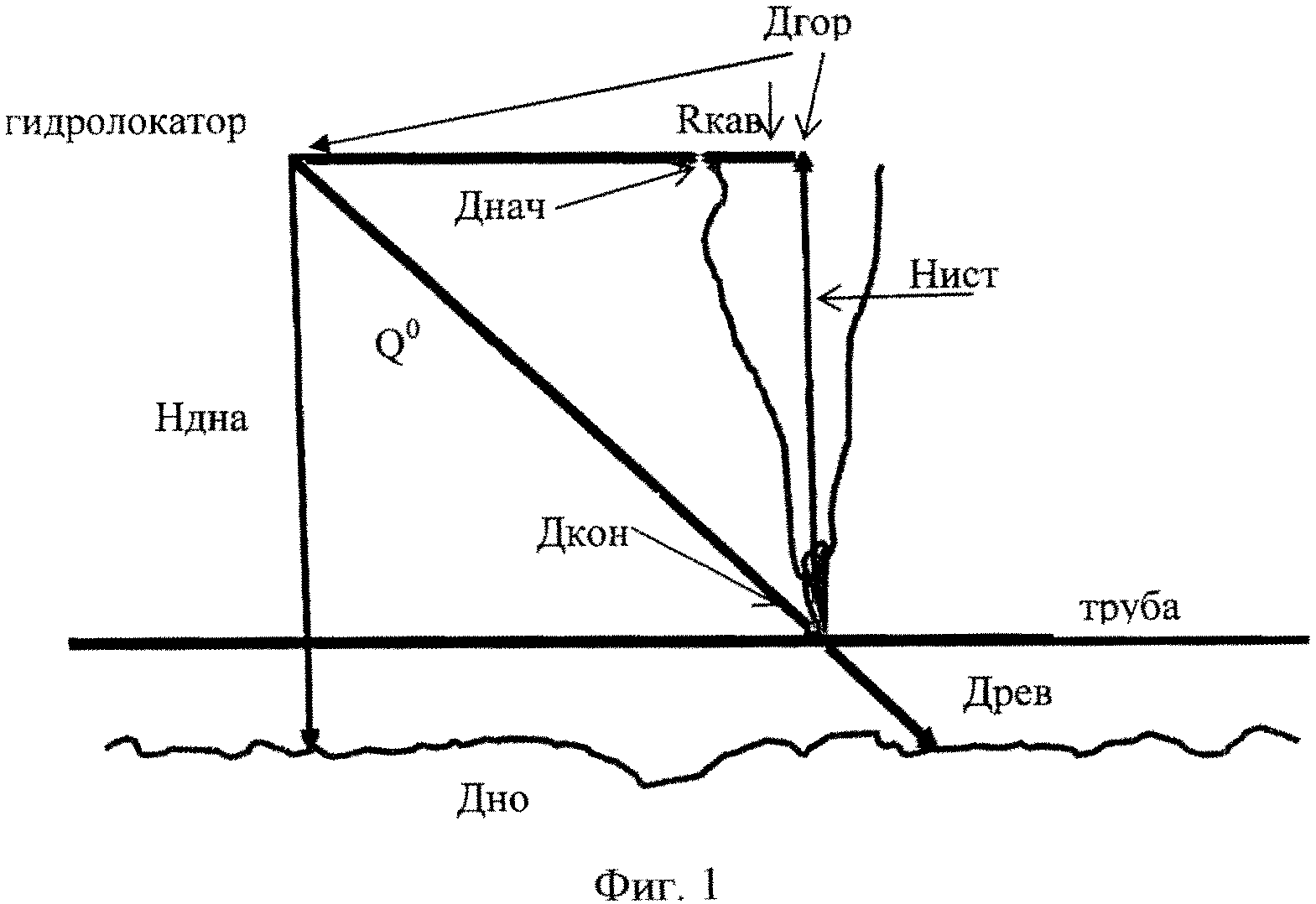
В нашем случае следует исходить из нескольких очевидных предпосылок: источник выхода газа находится на трубе, газ поднимается только вверх и объем его увеличивается вследствие расширения вплоть до поверхности, поэтому газовая пелена расположена вертикально, при подъеме пузырей их размер увеличивается. Для обнаружения и классификации пелены пузырей необходимо использовать обычный гидролокатор, содержащий приемную и излучающую антенну, коммутатор, генератор зондирующего сигнала и антенну со статическим веером характеристик направленности при приеме. Поскольку зондирующий сигнал распространяется в водной среде по сферическому закону, то при излучении зондирующего сигнала с надводного корабля в горизонтальном направлении акустическая энергия будет распространяться, расширяясь в выбранном направлении. На фиг. 1 представлена схема измерений, которая позволяет определить объем вытекающего газа. Первый эхо-сигнал придет от той части пелены пузырей, которая, расширяясь, уже достигла поверхности, и расстояние до пелены является минимальным  , поскольку ширина пелены пузырей у поверхности максимальная. Последний эхо-сигнал придет от той части пелены пузырей, которая находится в начале выхода из трубопровода
, поскольку ширина пелены пузырей у поверхности максимальная. Последний эхо-сигнал придет от той части пелены пузырей, которая находится в начале выхода из трубопровода  , что соответствует максимальному времени распространения. Поскольку глубина трубопровода может быть значительной, то и пелена пузырей, расширяясь вертикально вверх, будет создавать значительный объем, который принимает форму, близкую к конусу. Известно, что объем конуса определяется выражением V=3,14(R2h)/3, где R - радиус основания конуса, a h - высота конуса. Поскольку отношение 3,14\3=1,04, то при тех ошибках измерения, которые имеет гидролокатор, это отношение можно принять равное 1. Высота конуса определяется глубиной погружения трубы Н. Радиус конуса определяется радиусом газовой каверны на поверхности
, что соответствует максимальному времени распространения. Поскольку глубина трубопровода может быть значительной, то и пелена пузырей, расширяясь вертикально вверх, будет создавать значительный объем, который принимает форму, близкую к конусу. Известно, что объем конуса определяется выражением V=3,14(R2h)/3, где R - радиус основания конуса, a h - высота конуса. Поскольку отношение 3,14\3=1,04, то при тех ошибках измерения, которые имеет гидролокатор, это отношение можно принять равное 1. Высота конуса определяется глубиной погружения трубы Н. Радиус конуса определяется радиусом газовой каверны на поверхности  , где
, где  - горизонтальное положение источника газовой течи, которое необходимо определить. Зондирующий сигнал распространяется по сферическому закону и после отражения от пелены пузырей под углом Q°, исходящей из трубы при
- горизонтальное положение источника газовой течи, которое необходимо определить. Зондирующий сигнал распространяется по сферическому закону и после отражения от пелены пузырей под углом Q°, исходящей из трубы при  Можно воспользоваться положением пространственного канала, но в этом случае погрешность будет больше. После эхо-сигнала Дкон наблюдается увеличение уровня эхо-сигнала, что соответствует началу донной реверберации и может быть измерена дистанция до начала реверберации
Можно воспользоваться положением пространственного канала, но в этом случае погрешность будет больше. После эхо-сигнала Дкон наблюдается увеличение уровня эхо-сигнала, что соответствует началу донной реверберации и может быть измерена дистанция до начала реверберации  . Для определения угла Q° воспользуемся измерениями глубины до дна Ндна в месте расположения гидролокатора, которую можно определить с использованием стандартных гидролокаторов-эхолотов. Это известные устройства, которые используются на всех современных кораблях. (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-исследовательские средства». СПб. 2009 г. Изд. «ЛЭТИ», стр. 192.)
. Для определения угла Q° воспользуемся измерениями глубины до дна Ндна в месте расположения гидролокатора, которую можно определить с использованием стандартных гидролокаторов-эхолотов. Это известные устройства, которые используются на всех современных кораблях. (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-исследовательские средства». СПб. 2009 г. Изд. «ЛЭТИ», стр. 192.)
Имея оценку Древ и Ндна, определяется sinQ°, под которым находится источник газовой течи  После этого может быть определена глубина Нист положения источника газовой течи и горизонтальная дистанция положения газовой течи
После этого может быть определена глубина Нист положения источника газовой течи и горизонтальная дистанция положения газовой течи  Глубина источника газовой течи будет равна
Глубина источника газовой течи будет равна  И тогда горизонтальная дистанция положения источника газовой течи
И тогда горизонтальная дистанция положения источника газовой течи  . Радиус конуса газовой каверны может быть определен как
. Радиус конуса газовой каверны может быть определен как  . После всех преобразований объем газовой каверны можно определить как
. После всех преобразований объем газовой каверны можно определить как

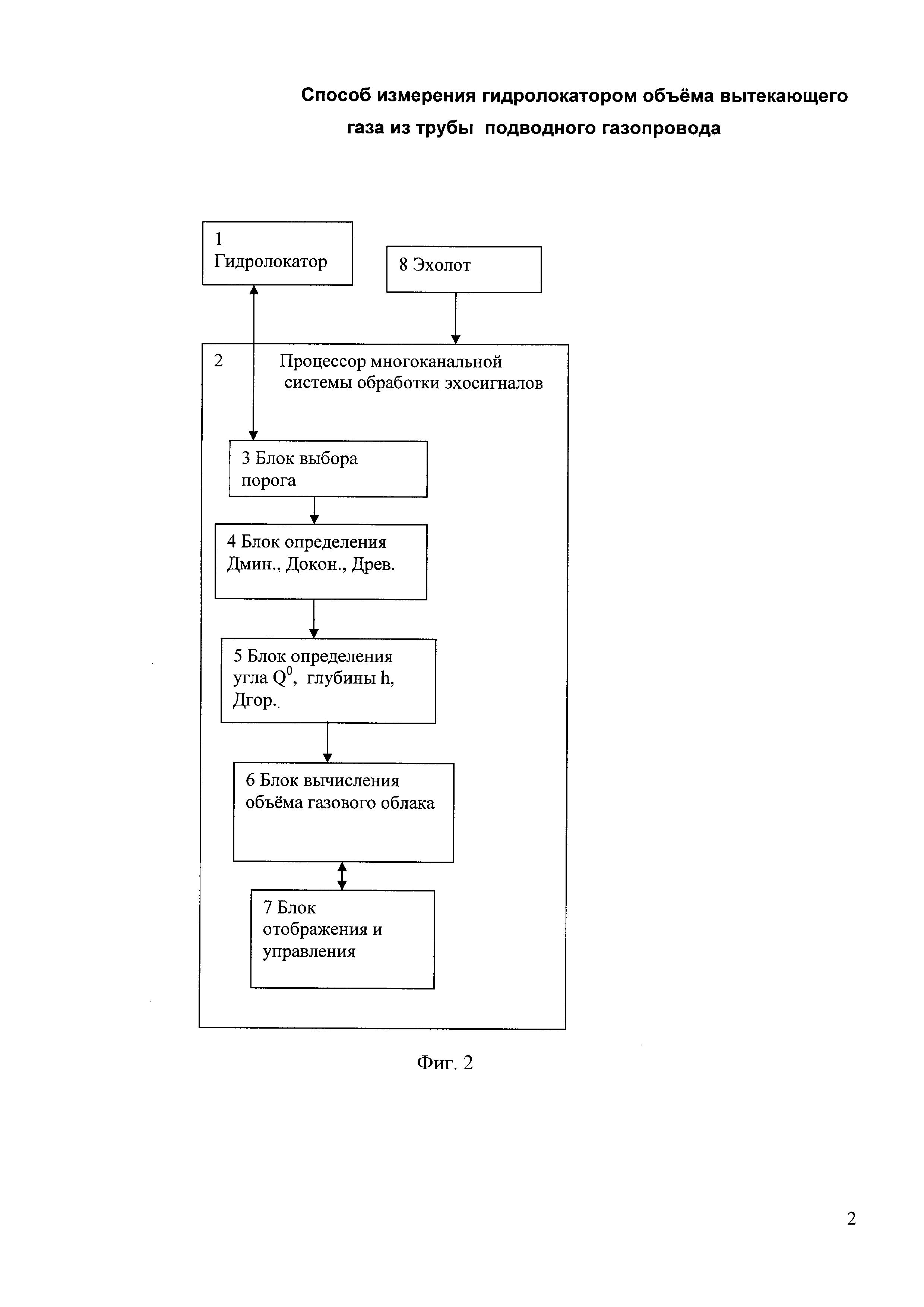
Сущность предлагаемого способа поясняется фиг. 1 и 2, при этом на фиг. 1 приведена схема, поясняющая расчет объема расхода газа из течи, на фиг. 2 представлена структурная схема устройства для определения глубины местоположения источника газовой пелены.
Устройство (фиг. 2) содержит гидролокатор 1, соединенный двусторонней связью с процессором 2, который содержит последовательно соединенные блок 3 выбора порога, блок 4 определения Дмин, Дкон, Древ, блок 5 определения угла Q°, глубины Нист,  , блок 6 вычисления объема газа, вытекающего из течи, блок 7 отображения и управления. Блок 8 - эхолот для измерения глубины дна, который соединен со вторым входом процессора 2.
, блок 6 вычисления объема газа, вытекающего из течи, блок 7 отображения и управления. Блок 8 - эхолот для измерения глубины дна, который соединен со вторым входом процессора 2.
Гидролокатор является известным устройством и достаточно хорошо известный из литературы (А.С. Колчеданцев «Гидроакустические станции», Судостроение, Л., 1982 г., стр., 60-90).
Многолучевой эхолот является известным устройством, который используется в современном корабельном обеспечении (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-исследовательские средства». СПб., 2009 г., Изд. «ЛЭТИ», стр. 89-113).
В настоящее время вся гидроакустическая аппаратура делается с использованием цифровых методов обработки и реализуется на спецпроцессорах или персональных компьютерах с соответствующим программным обеспечением, имеющимся в наличии или специально разработанным на основе стандартных методов программирования.
Цифровые процессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логикой вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз, и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в книге Корякин Ю.А. Смирнов С.А. Яковлев Г.В. «Корабельная гидроакустическая техника» Санкт Петербург. Изд. Наука 2004 г. на стр. 281. Там же приведено описание гидроакустических комплексов и гидролокаторов, построенных на основе спецпроцессоров стр. 296., стр. 328.
Процесс определения газового облака происходит следующим образом. Гидролокатор 1 излучает зондирующий сигнал, принимает эхо-сигнал и передает его на спецпроцессор 2. Гидролокатор обеспечивает формирование зондирующего сигнала, излучение его антенной, формирование характеристик направленности в излучении и приеме, полосовую фильтрацию входного процесса, преобразование в цифровой вид и передачу в спецпроцессор 2.
В блоке 3 спецпроцессора 2 измеряется уровень входного шума и формируется порог, превышение которого в блоке 4 определяет наличие эхо-сигнала. В блоке 4 измеряется дистанция до момента начала эхо-сигнала от газового облака Дмин на поверхности, дистанция Докон эхо-сигнала до начала газового облака в точке формирования пелены и дистанция до момента отражения от дна  Одновременно из блока 8 в спецпроцессор поступает оценка глубины Ндна от многолучевого эхолота. По измеренным Древ и Ндна определяется угол Q°, глубина Нист,
Одновременно из блока 8 в спецпроцессор поступает оценка глубины Ндна от многолучевого эхолота. По измеренным Древ и Ндна определяется угол Q°, глубина Нист,  в блоке 5. Полученные оценки поступают в блок 6, где производятся измерения объема газового облака, поступающего трубопровода, значение которого отображается в блоке 7 управления и отображения.
в блоке 5. Полученные оценки поступают в блок 6, где производятся измерения объема газового облака, поступающего трубопровода, значение которого отображается в блоке 7 управления и отображения.
Таким образом, предложенный способ позволяет обнаружить пелену газовой течи и измерить глубину места образования газовой пелены гидроакустическими средствами на больших дистанциях с меньшей погрешностью, чем в прототипе, и одновременно определить объем газового облака, вытекающего из газопровода, поэтому можно считать заявленный технический результат достигнутым.




Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

