Результат интеллектуальной деятельности: АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ
Вид РИД
Изобретение
Изобретение относится к аппаратам на воздушной подушке, преимущественно к самолетам с шасси на воздушной подушке, оснащенным системой стабилизации, в частности, системой демпфирования колебаний по высоте, и системой автоматического управления по углам тангажа и крена.
Из уровня техники известны аппараты на воздушной подушке (далее АВП), оснащенные системой стабилизации. Так, в патенте РФ №2256570, МПК B60V 1/16, B60V 1/12, B60V 3/02, опубл. 20.05.2005 г., [1], представлен АВП, содержащий корпус, ограждение воздушной подушки, снабженное воздуховодом, расположенным вдоль периметра АВП и разделенным, по меньшей мере, на две изолированные полости, пневматически связанные с ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, кинематически связанный не менее чем с одним нагнетателем, соединенным посредством воздуховода и дроссельной заслонки с соответствующей изолированной полостью, по меньшей мере, один канал, соединяющий камеру воздушной подушки с атмосферой посредством управляемого клапана, систему управления, содержащую, по меньшей мере, один датчик вертикальной перегрузки и, по меньшей мере, один датчик угловой перегрузки, при этом указанные датчики связаны с вычислителем, вырабатывающим по сигналам от указанных датчиков сигнал на привод открытия соответствующей дроссельной заслонки и управляемого клапана.
В описании изобретения [1], принятого в качестве наиболее близкого аналога, система управления выполнена без обратной связи, что является недостатком изобретения [1], поскольку приводит к увеличению действующих на аппарат на воздушной подушке перегрузок при движении по взволнованной водной и неровной грунтовой поверхностям.
Решаемой в изобретении задачей является уменьшение действующих на АВП перегрузок при движении по взволнованной водной и неровной грунтовой поверхностям.
Технический результат заключается в обеспечении автоматического управления угловыми колебаниями и демпфирования вертикальных колебаний АВП за счет выполнения системы управления с обратной связью.
Сущность изобретения состоит в следующем.
Аппарат на воздушной подушке, как и в наиболее близком аналоге, содержит корпус, ограждение воздушной подушки, снабженное воздуховодом, расположенным вдоль периметра корпуса аппарата на воздушной подушке и разделенным, по меньшей мере, на две изолированные полости, пневматически связанные с ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, кинематически связанный не менее чем с одним нагнетателем, соединенным посредством воздуховода и дроссельной заслонки с соответствующей изолированной полостью, по меньшей мере, один канал, соединяющий камеру воздушной подушки с атмосферой посредством управляемого клапана, систему управления, содержащую, по меньшей мере, по одному датчику вертикальной перегрузки и угловой перегрузки, при этом указанные датчики связаны с вычислителем, вырабатывающим по сигналам от указанных датчиков сигнал на привод открытия соответствующей дроссельной заслонки и управляемого клапана, но в отличие от наиболее близкого аналога, привод открытия, по меньшей мере, одной дроссельной заслонки и, по меньшей мере, одного управляемого клапана выполнен электромеханическим, а система управления выполнена с обратной связью по угловому положению и по скорости аппарата на воздушной подушке.
Аппарат на воздушной подушке характеризуется тем, что электромеханический привод дроссельных заслонок выполнен с электродвигателем постоянного тока, в котором выходной момент соответствует входному сигналу, подаваемому на токовый контур электродвигателя постоянного тока.
При этом электродвигатель электромеханического привода дроссельных заслонок выполнен с возбуждением от постоянных магнитов.
Аппарат на воздушной подушке характеризуется тем, что обратная связь по угловому положению содержит датчик углового положения, который выполнен в виде синусно-косинусного вращающегося трансформатора, кинематическая связь электродвигателя постоянного тока с соответствующей дроссельной заслонкой содержит шарико-винтовую передачу, при этом синусно-косинусный вращающийся трансформатор соединен с шарико-винтовой передачей посредством реечного механизма.
Аппарат на воздушной подушке характеризуется тем, что привод управляемого клапана содержит электродвигатель постоянного тока, а обратная связь по скорости сформирована посредством выделения электродвижущей силы на обмотках якоря.
Представленные признаки являются существенными для достижения технического результата и образуют совокупность.
Выполнение аппарата на воздушной подушке содержащим корпус, ограждение воздушной подушки, снабженное воздуховодом, расположенным вдоль периметра корпуса аппарата на воздушной подушке и разделенным, по меньшей мере, на две изолированные полости, пневматически связанные с ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, кинематически связанный не менее чем с одним нагнетателем, соединенным посредством воздуховода и дроссельной заслонки с соответствующей изолированной полостью, по меньшей мере, один канал, соединяющий камеру воздушной подушки с атмосферой посредством управляемого клапана, систему управления, содержащую датчики вертикальной и угловой перегрузок, связанные с вычислителем, вырабатывающим по сигналам от указанных датчиков сигнал на привод открытия соответствующих дроссельной заслонки и управляемого клапана, выполненным электромеханическим. Выполнение системы управления с обратной связью по угловому положению и по скорости аппарата на воздушной подушке обеспечивает демпфирование вертикальных колебаний аппарата на воздушной подушке и автоматическое управление угловыми колебаниями. Это позволяет уменьшить амплитуды угловых перемещений и вертикальных перегрузок аппарата, обусловленных возмущающим воздействием взволнованной водной и неровностей грунтовой поверхностей.
Выполнение электромеханического привода дроссельных заслонок с электродвигателем постоянного тока, в котором выходной момент соответствует входному сигналу, подаваемому на токовый контур электродвигателя постоянного тока, обеспечивает автоматическое управление угловыми колебаниями и демпфирования вертикальных колебаний АВП с обратной связью при управлении отклонением дроссельных заслонок и/или управляемого клапана.
Выполнение электродвигателя электромеханического привода дроссельных заслонок с возбуждением от постоянных магнитов уменьшает массогабаритные размеры электродвигателя и снижает индуктивность якоря электродвигателя, что уменьшает время отклонения дроссельных заслонок и управляемого клапана и, следовательно, способствует уменьшению амплитуды угловых и вертикальных перемещений при автоматическом управлении угловыми колебаниями и демпфировании вертикальных колебаний АВП.
Включение в обратную связь по угловому положению датчика углового положения, выполненного в виде синусно-косинусного вращающегося трансформатора, выполнение кинематической связи электродвигателя постоянного тока с соответствующей дроссельной заслонкой, содержащей шарико-винтовую передачу, и соединение с ней посредством реечного механизма синусно-косинусного вращающегося трансформатора уменьшает потери энергии и обеспечивает высокую точность установки дроссельных заслонок при поступлении сигнала на их отклонение, что уменьшает энергозатраты и время отклонения дроссельных заслонок и управляемого клапана и способствует уменьшению амплитуды угловых и вертикальных перемещений АВП при автоматическом управлении угловыми колебаниями и демпфировании вертикальных колебаний АВП.
Выполнение привода управляемого клапана содержащим электродвигатель постоянного тока и формирование обратной связи системы управления по скорости посредством выделения электродвижущей силы на обмотках якоря уменьшает массогабаритные параметры системы автоматического управления, и, следовательно, момент инерции АВП в целом, что обеспечивает автоматическое управление угловыми колебаниями и демпфирование вертикальных колебаний АВП и позволяет уменьшить амплитуды вертикальных перегрузок аппарата на воздушной подушке.
Изобретение поясняется чертежами.
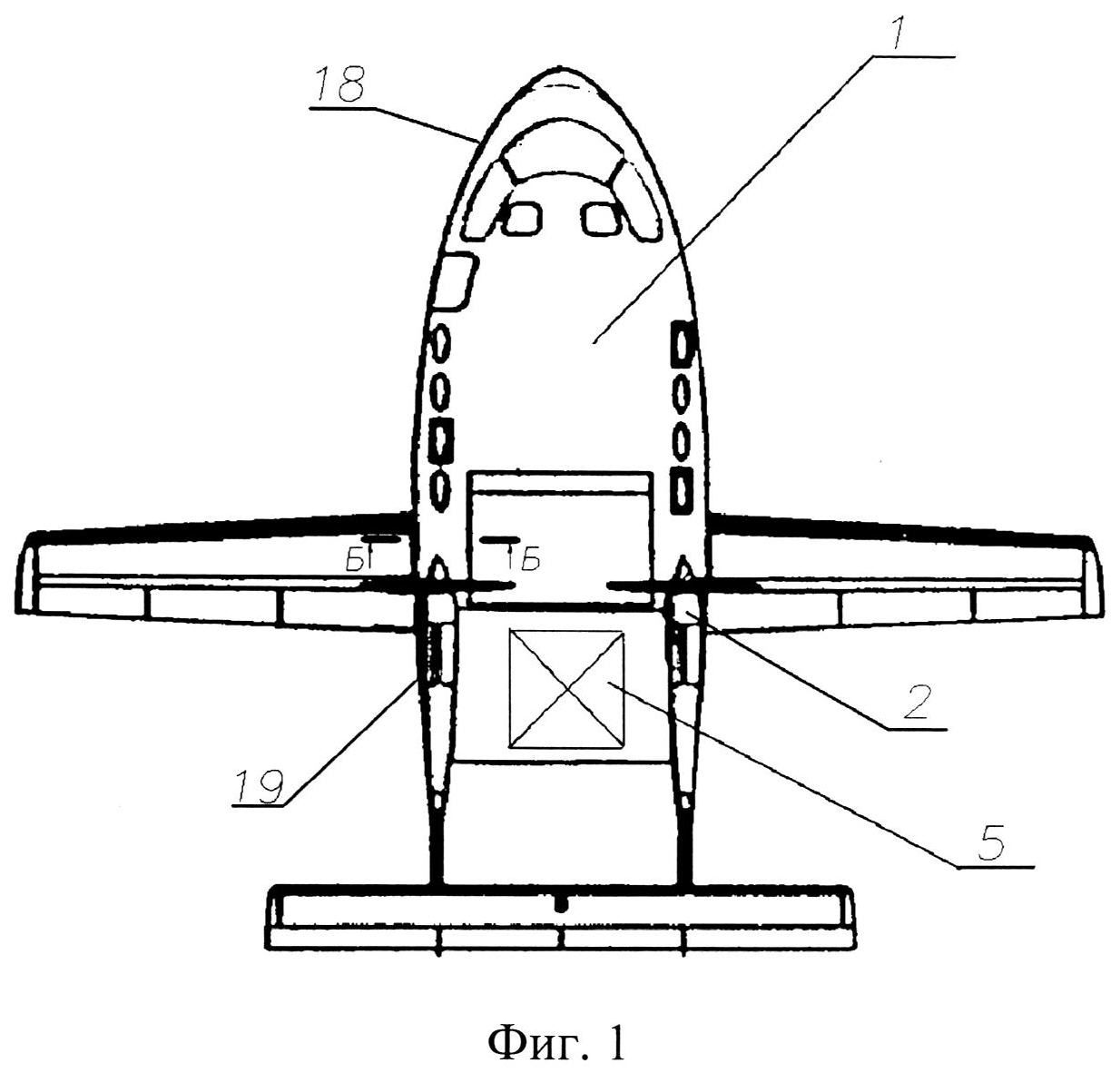
На фиг.1 представлен АВП при виде в плане.
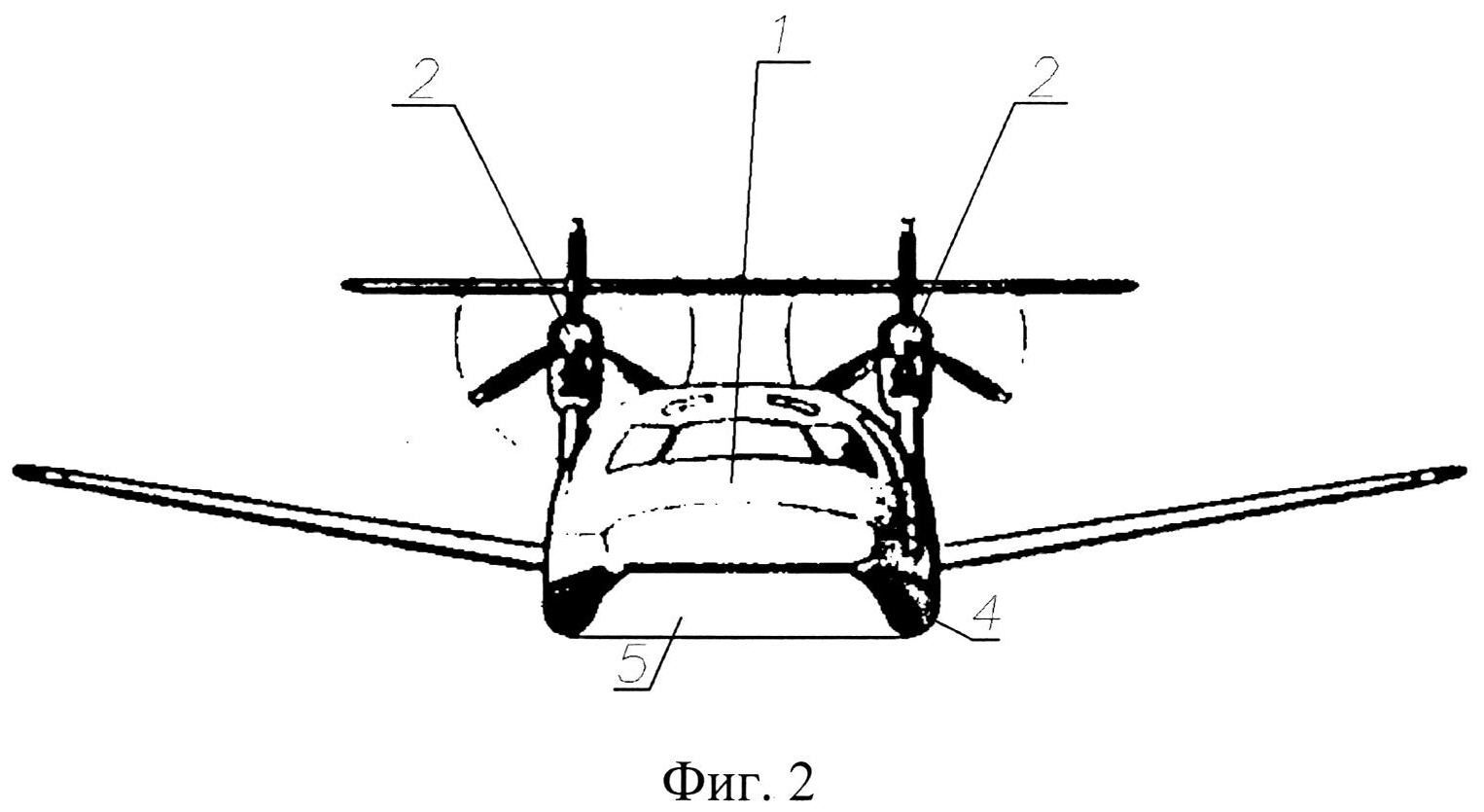
На фиг.2 представлен АВП при виде спереди.
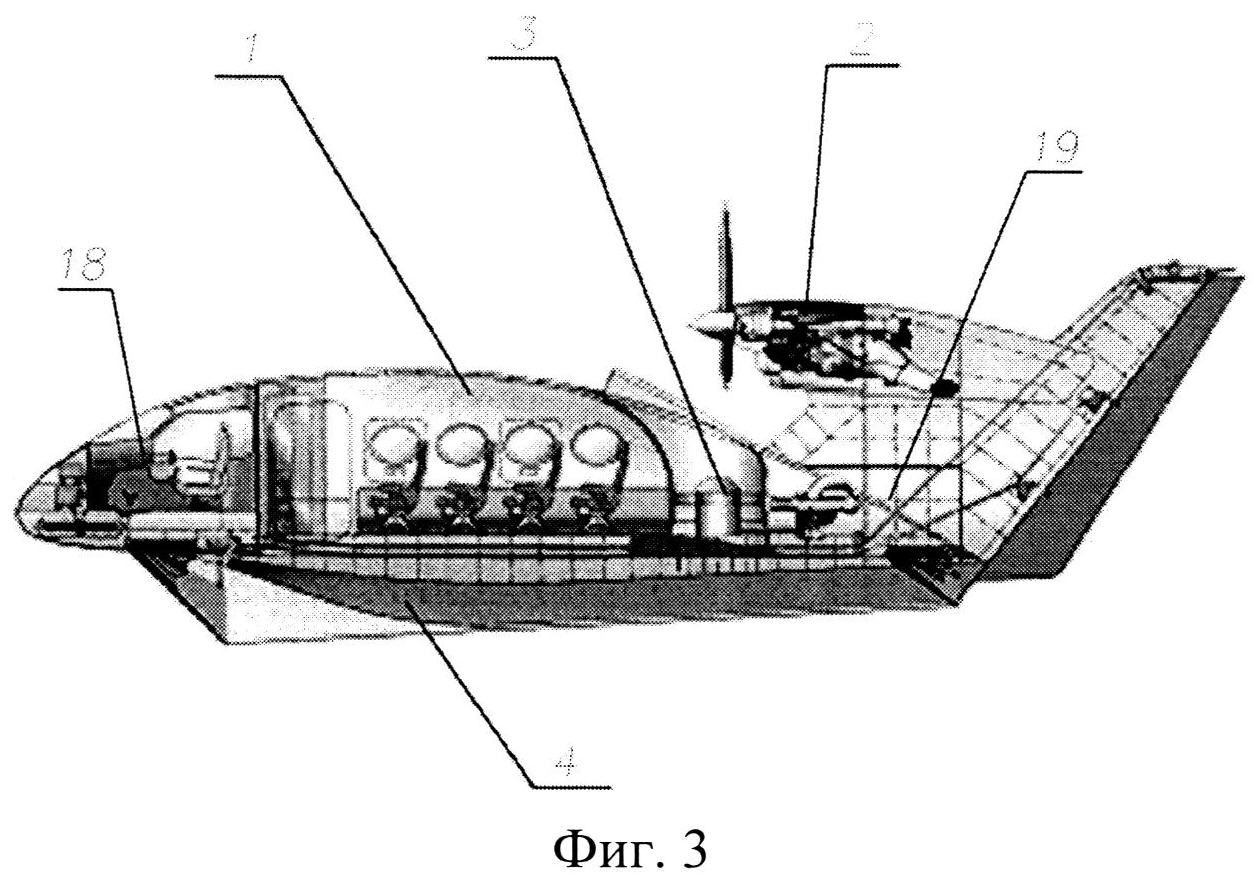
На фиг.3 представлен разрез А-А фиг.1.
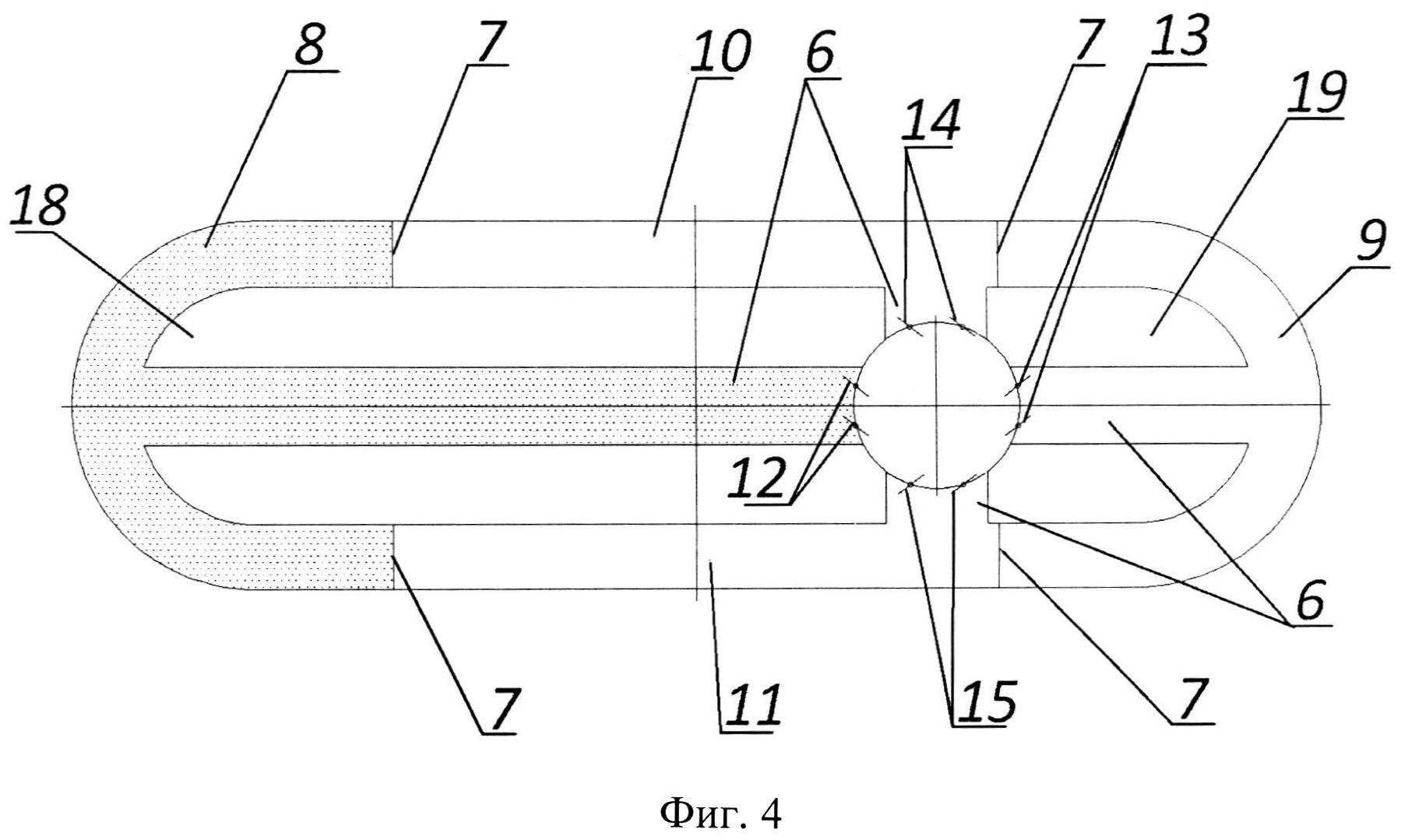
На фиг.4 приведена схема разделения ограждения АВП на изолированные полости.
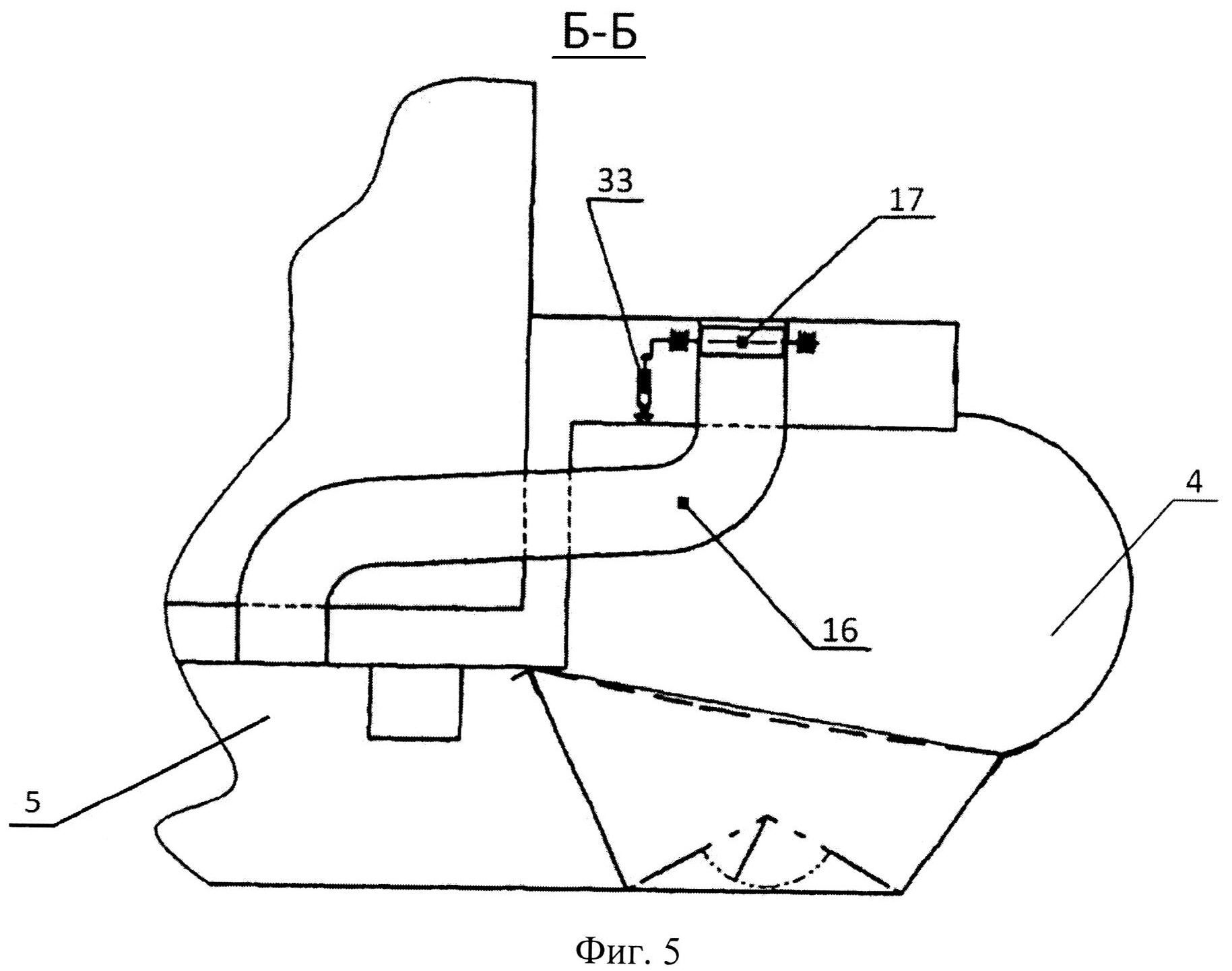
На фиг.5 показан разрез Б-Б на фиг.1.
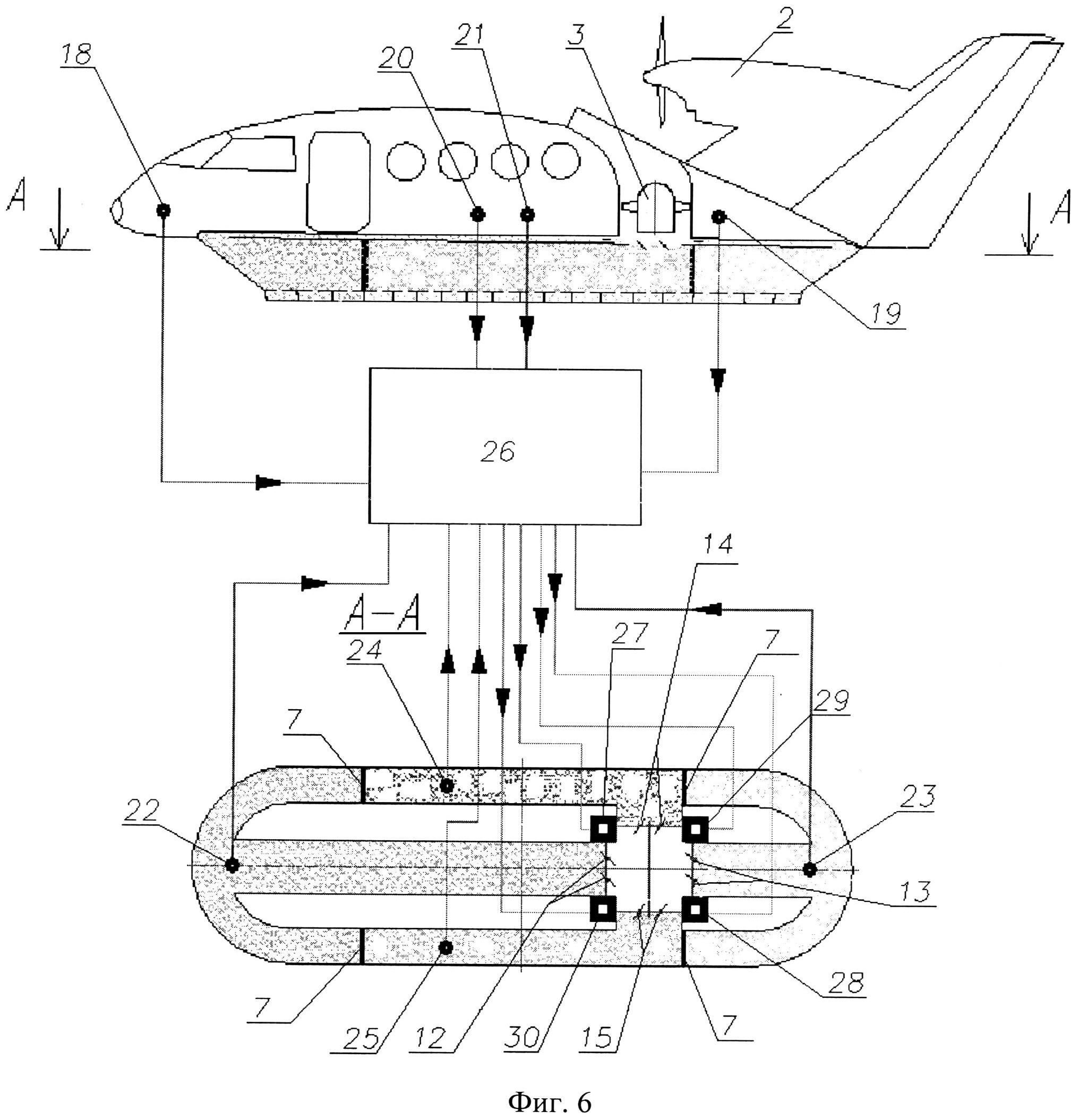
На фиг.6 приведена схема управления дроссельными заслонками.
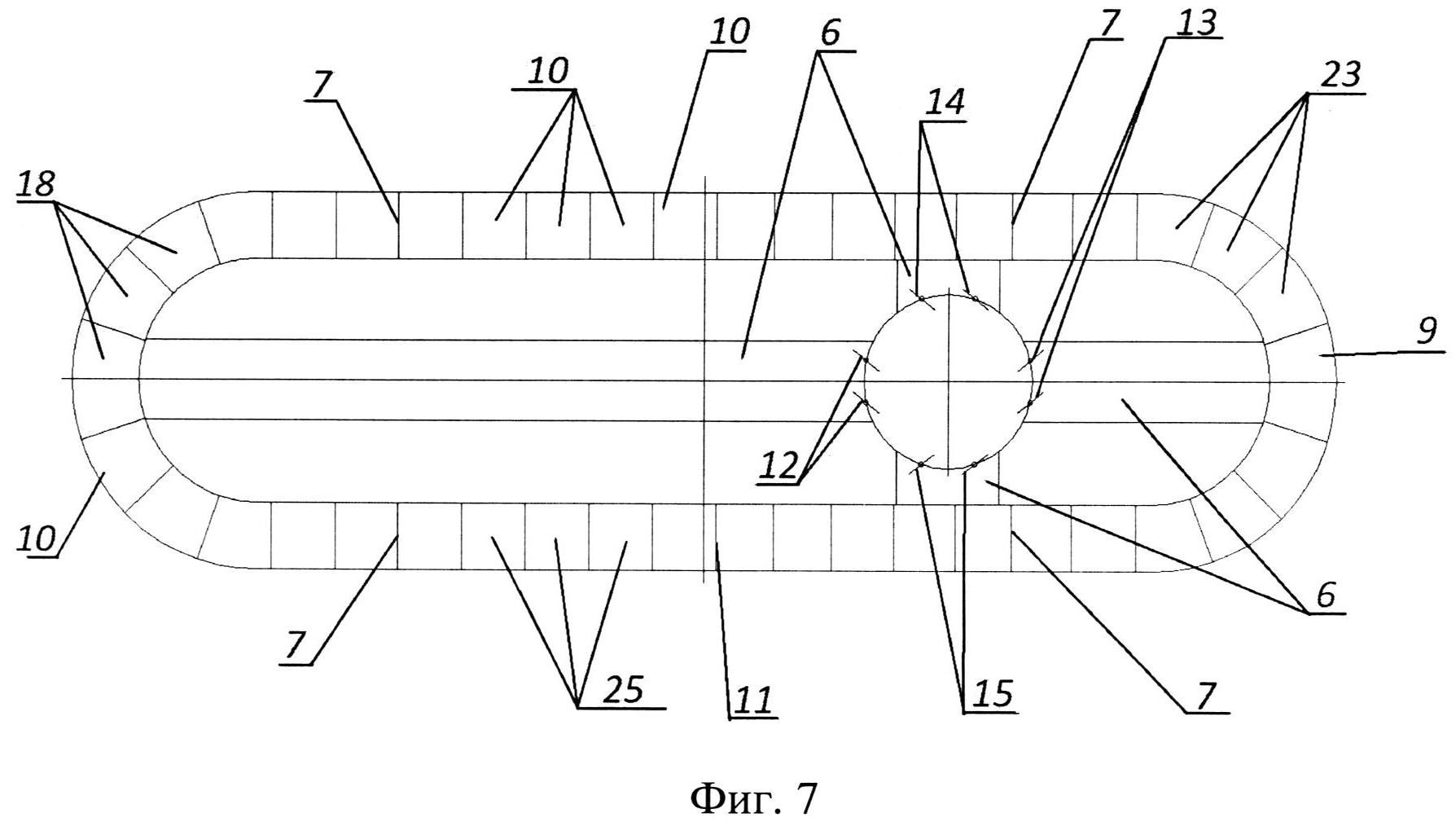
На фиг.7 приведена схема расположения датчиков давления воздуха в элементах ограждения АВП.
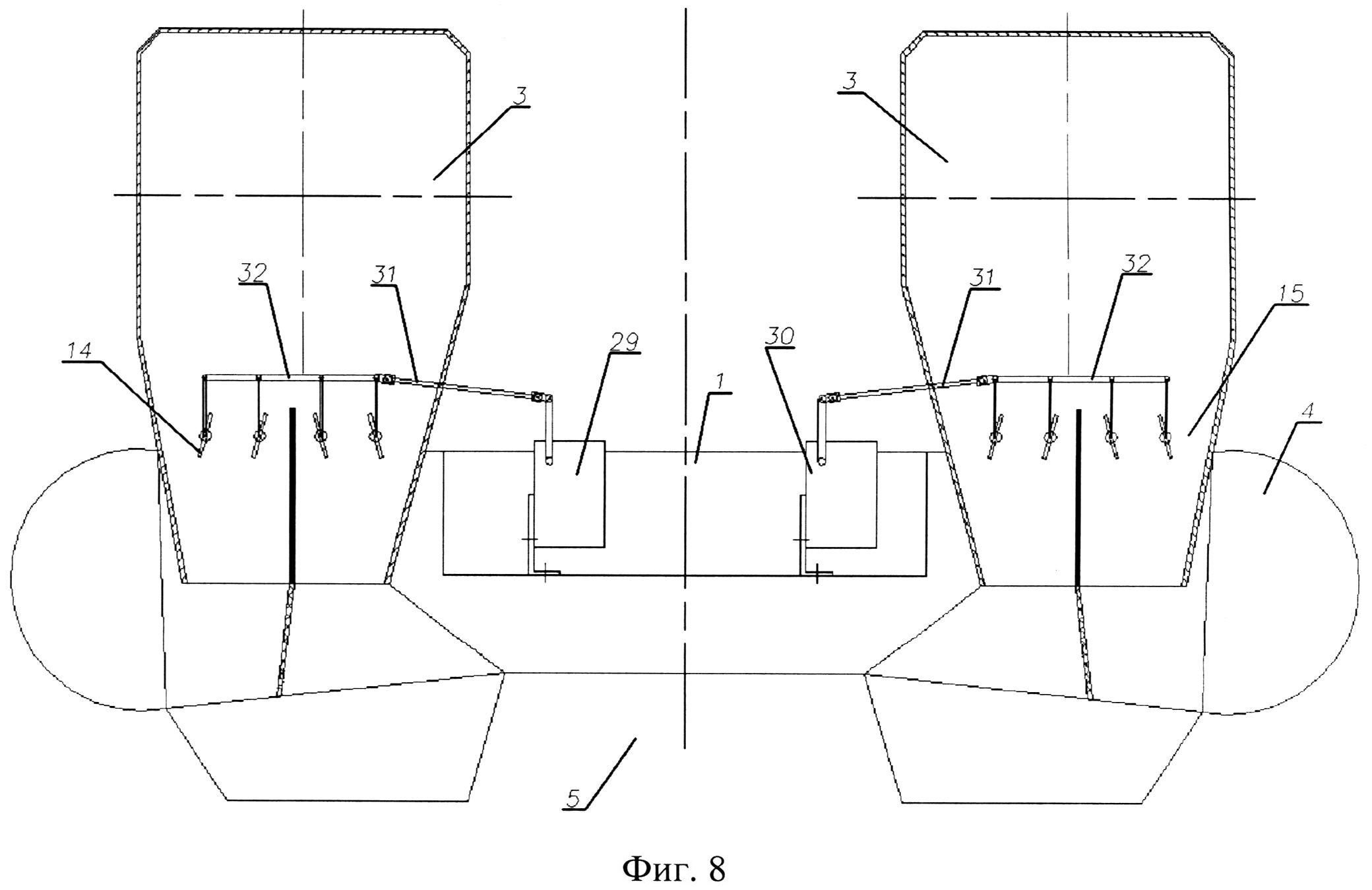
На фиг.8 показана блок-схема системы управления АВП по углам крена и тангажа.
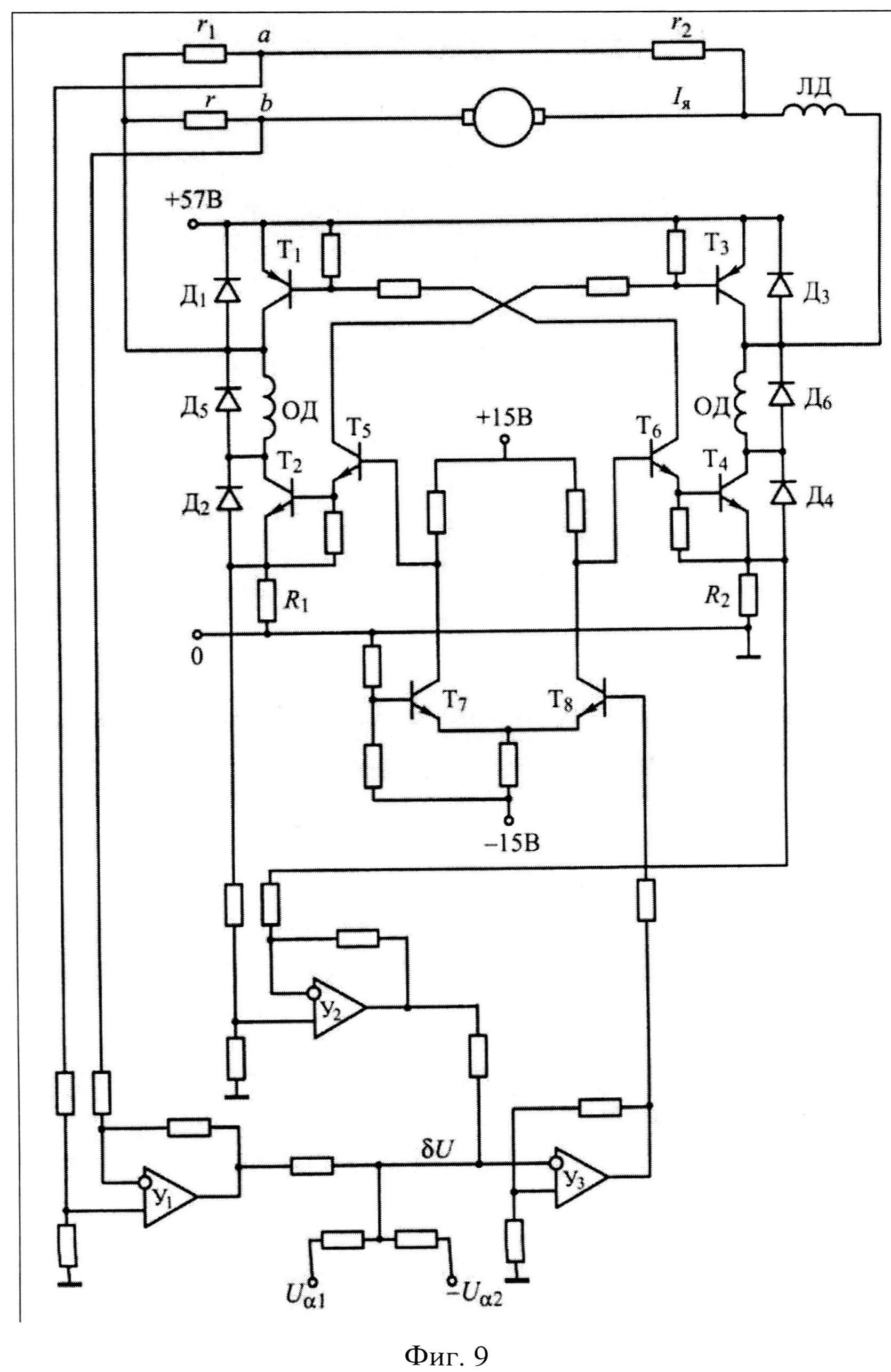
На фиг.9 показана функциональная схема электромеханического привода постоянного тока.
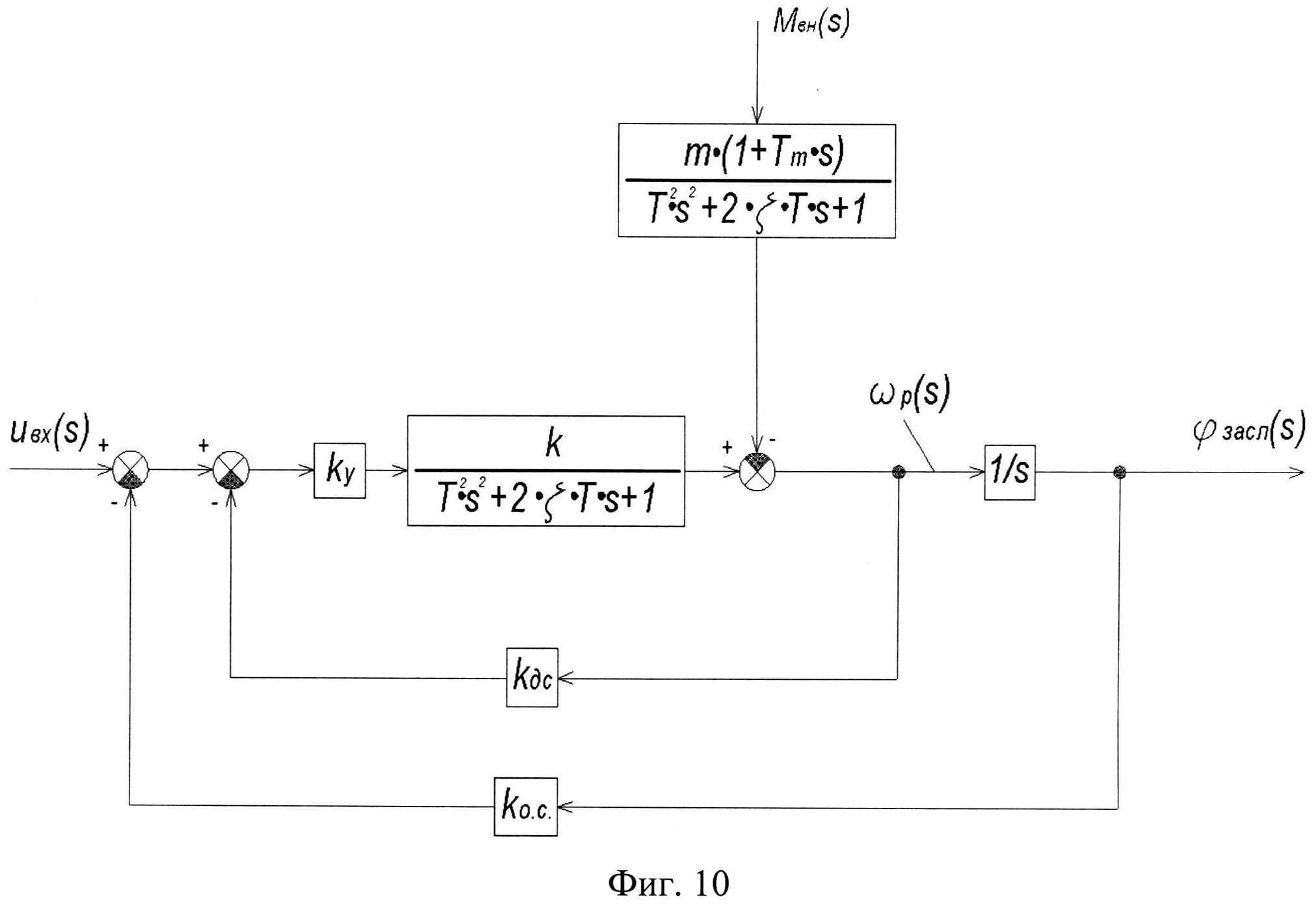
На фиг.10 показана блок-схема адаптивной системы демпфирования АВП по углам крена и тангажа. Раскрытие изобретения.
АВП содержит корпус 1, силовую установку, включающую, по меньшей мере, один двигатель 2, кинематически связанный, например, посредством трансмиссии, не менее чем с одним нагнетателем, выполненным, например, в виде осевого вентилятора 3, ограждение 4 камеры 5 воздушной подушки и систему управления (фиг.1, 2, 3).
По периметру корпуса 1, например, вдоль ограждения 4, расположены воздуховоды 6, разделенные, например, мембранами 7, по меньшей мере, на две, а в предпочтительном варианте - на четыре изолированные полости: носовую 8, кормовую 9, правого 10 и левого 11 бортов (фиг.4, 5, 6). Каждая из изолированных полостей 8, 9, 10, 11 пневматически связана с ограждением 4 и с нагнетателем, например, осевым вентилятором 3, посредством дроссельных заслонок соответственно 12, 13, 14 и 15. Камера 5 воздушной подушки соединена с атмосферой каналом 16 с размещенным в нем управляемым клапаном 17 (фиг.5).
Система управления содержит, по меньшей мере, по одному датчику вертикальной перегрузки и одному угловой перегрузки, в предпочтительном варианте выполнения - датчики перегрузки в носовой 18 и кормовой 19 частях АВП, датчики угла тангажа 20 и угла крена 21. В каждой из изолированных полостей 8, 9, 10, 11 установлены датчики давления 22, 23, 24, 25 соответственно в носовой, кормовой, правого борта, левого борта изолированных полостях (фиг.6, 7). Все датчики 18-25 связаны с вычислителем 26, вырабатывающим по сигналам от датчиков 18-25 сигнал на привод открытия электродвигателями 27, 28, 29, 30 соответственно дроссельных заслонок 12, 13, 14, 15, а также управляемого клапана 17 (фиг.6, 7). Система управления также может содержать контур управления работой двигателей 2 силовой установки и нагнетателей, например, осевого вентилятора 3. При этом система управления выполнена с обратной связью по угловому положению и по скорости.
В предпочтительном варианте выполнения камера 5 воздушной подушки мембранами 7 разделена на четыре изолированные полости 8, 9, 10, 11, каждая из которых оснащена собственным нагнетателем (фиг.8), например, осевым вентилятором 3. Обратная связь системы управления по угловому положению содержит датчики 20, 21 углового положения по тангажу и крену (фиг.6), которые выполнены в виде синусно-косинусного вращающегося трансформатора (на фиг. не показано), кинематическая связь электродвигателя постоянного тока с соответствующей дроссельной заслонкой содержит шарико-винтовую передачу 31, при этом синусно-косинусный вращающийся трансформатор соединен с шарико-винтовой передачей 31 посредством реечного механизма 32 (фиг.8). Привод управляемого клапана 17 содержит электродвигатель 33 постоянного тока (фиг.5), а на фиг.9 показана обратная связь по скорости, сформированная посредством выделения электродвижущей силы на обмотках якоря электродвигателей 27-30 и 33 постоянного тока.
При выполнении АВП небольшой взлетной массы, например, до 2-х тонн, экспериментальных АВП и самоходных моделей в качестве привода дроссельных заслонок 11-14 целесообразно использовать электромеханический привод с электродвигателями соответственно 27, 28, 29, 30 постоянного тока (фиг.6, 8, 9), в каждом из которых выходной момент соответствует входному сигналу, подаваемому на их токовый контур (фиг.9, 10). При этом для уменьшения массогабаритных характеристик электромеханического привода электродвигатели 27, 28, 29, 30 могут выполняться с возбуждением от постоянных магнитов.
Система управления АВП по углам крена и тангажа, как показано на фиг.6, содержит:
- исполнительную подсистему (электродвигатели 27, 28, 29, 30 приводов поворота дроссельных заслонок 12, 13, 14, 15);
- регулирующую подсистему (система дроссельных заслонок 12, 13 14, 15);
- энергетическую подсистему (двигатели 2, нагнетатели, например, осевые вентиляторы 3, источники питания);
- логико-вычислительную подсистему (вычислитель 26, выполненный, например, в виде программируемого контроллера);
- информационную подсистему (датчики 18, 19, 20, 21, 22, 23, 24, 25).
Выполнение электромеханического привода с исполнительным электродвигателем постоянного тока представлено на примере привода заслонки 14 электродвигателем 29 постоянного тока (фиг.8). Привод выполнен с моментным управлением, т.е. входному сигналу токового контура соответствует развиваемый момент электродвигателя 29 (фиг.8, 9, 10).
Электродвигатель 29 выполнен с возбуждением от постоянных магнитов в целях уменьшения массогабаритных показателей. В связи с этим снижается индуктивность обмоток якоря. В цепь питания включен силовой линейный дроссель ЛД (фиг.9), что позволяет уменьшить скорость нарастания тока и частоту его переключений.
Электродвигатель 29 кинематически связан с дроссельной заслонкой 14 с использованием силового редуктора, выполненного на основе шарико-винтовой передачи 31 с промежуточным редуктором и рычажной передачей на выходе (на фиг. не показано). В качестве датчика 20, 21 углового положения по тангажу и крену в цепи главной обратной связи использован малогабаритный синусно-косинусный вращающийся трансформатор (на фиг. не показан), соединенный с шарико-винтовой передачей 31 посредством реечной передачи 32 (фиг.8).
Для формирования корректирующего воздействия обратной связи системы управления по скорости используется электродвижущая сила (ЭДС) электродвигателя 29, которая может быть выделена на обмотках якоря схемой, представленной на фиг.9.
Схема выделения ЭДС, включающая в себя три резистора r, r1 r2, совместно с обмоткой якоря rЯ электродвигателя 29 образует измерительный мост (фиг.9). На выходе измерительного моста (между точками a и b) напряжение Uab приблизительно пропорционально ЭДС двигателя: Uab=rЕ/(r+rЯ), где Е - ЭДС электродвигателя 29. В целях уменьшения потерь мощности сопротивления выбирают r<<rЯ, поэтому для получения обратной связи заданной величины на выходе измерительного моста включен операционный усилитель У1 с большим коэффициентом усиления (фиг.9).
Усилитель мощности выполнен как регулятор тока электродвигателя 29 для обеспечения моментного управления приводом. Его схема содержит мост на четырех силовых транзисторах Т1, Т2, Т3, Т4, с диодами возвратного тока Д1, Д2, Д3, Д4. Ограничивающие дроссели ОД с диодами Д5 и Д6 включены для ограничения токов перекрытия, возникающих в стойках моста в моменты переключения транзисторов. Транзисторы Т1, Т2, Т3, Т4 управляются транзисторами Т5 и Т6, работающими от дифференциального каскада на транзисторах Т7 и Т8. Усилитель мощности охвачен глубокой обратной связью по выходному току якоря IЯ. В качестве датчиков тока используются безъиндуктивные резисторы R1 и R2 в совокупности с суммирующим операционным усилителем У2. Цепь обратной связи по току замкнута через гистерезисный элемент, на вход которого подан управляющий сигнал δU (фиг.9).
Управление током якоря 1% и, следовательно, моментом исполнительного двигателя приводит к тому, что механические характеристики токового контура привода становятся идеально «мягкими», т.е. в линейной зоне значение развиваемого момента не зависит от скорости.
Аналогичным образом выполнены электромеханические приводы дроссельных заслонок 8, 9, 10, 11, отклоняемые электродвигателями 27, 28, 29, 30 постоянного тока, и может выполняться привод электродвигателя 33 управляемого клапана 17 (фиг.5).
АВП работает следующим образом.
АВП, как объект управления, двигаясь по неровной опорной поверхности, передает в информационную подсистему массив данных об объекте. Информационная подсистема собирает все данные с датчиков 18-25 о движении АВП, данные об энергетической подсистеме, передает суммирующую информацию в вычислитель 26 логико-вычислительной подсистемы, которая за счет введенных алгоритмов и программ вырабатывает управляющий сигнал на операционный усилитель. В усилителе электрических сигналов сравниваются управляющие сигналы и сигналы от датчиков обратной связи положения исполнительных элементов приводов. По сигналу рассогласования вырабатывается сигнал на электродвигатели 27-30 и посредством привода устанавливается необходимое положение дроссельных заслонок 12-15. Дроссельные заслонки 12-15 изменяют перераспределение массовых расходов воздуха, подаваемого в изолированные полости 8-11 ограждения 4 камеры 5 воздушной подушки, тем самым управляя АВП по углам крена и тангажа (фиг.6, 9).
При подключении обмотки статора электродвигателя, например, электродвигателя 29, к сети поток возбуждения ФB будет равен: ФB=kBIB, где kB - коэффициент потока; IB - ток возбуждения, который определяется из уравнения цепи статора: UB=rCIB+LC(dIB/dt)+CBIP, где UB - напряжение возбуждения, rC, LC - активное сопротивление и индуктивность цепи возбуждения; CBOP - составляющая напряжения, характеризующая размагничивающее действие ротора; IP - ток ротора.
При вращении возникает противоЭДС ротора: ЕР=СЕФB,ΩP, поэтому для цепи ротора имеем: UB-EP+rPIP+LP(dIP/dt), где rP, LP - активное сопротивление и индуктивность цепи ротора; ΩР - частота вращения ротора; СЕ - постоянная ЭДС. Тогда вращающий момент электродвигателя 29 равен: МЭM=СMФBIP, где СM - коэффициент момента.
Уравнение движения ротора принимает вид: I(dΩP/dt)+hCΩP=МЭМ-MBН, где МВН - внешний момент на валу двигателя, определяемый силами и моментом от дроссельной заслонки 14; h - межполюсное расстояние в роторе, h≈0; I - момент инерции заслонки 14, приведенный к общему штоку.
Математическая модель электромеханического привода с использованием электродвигателя, например, электродвигателя постоянного тока 29, представлена на фиг.10, содержит следующие параметры: kУ - коэффициент усиления; k=СЕ - постоянная ЭДС, CE=Np/60a; N - общее число проводников якоря; p - число полюсов; a - число параллельных ветвей, для петлевой обмотки a=p; T=(LPI)0,5/(CMCE); CM=No/2πa; ζ=0,5r(I/LPСMСE)0,5; m=rР/СMСЕ; Тm=LP/rP; kДС; где Т; ζ; m; Тm; kДС - коэффициенты датчика внутренней обратной связи; kOC - коэффициент главной обратной связи.
Такое управление электродвигателями 27-30, отклоняющими дроссельные заслонки 12-15 в условиях недостаточной определенности внешнего возмущения от опорной поверхности на объект управления, создают некоторый «запас» в управлении натурным АВП, т.е. придает приводу поворота дроссельных заслонок 12-15 свойство робастности (нечувствительности) по отношению к изменяющимся параметрам внешних воздействий.
Управляющая система, автоматически настраивающаяся на нужный закон управления посредством анализа поведения объекта при текущем управлении, называется адаптивной. Эффект приспособления к условиям функционирования в адаптивных системах обеспечивается за счет накопления и обработки информации о поведении объекта в процессе его движения. Это позволяет существенно снизить влияние неопределенности на качество управления, компенсируя недостаток априорной информации на этапе проектирования системы.
Представленное описание АВП раскрыто в достаточной мере для разработки конструкции и реализации изобретения на специализированных предприятиях.
ПЕРЕЧЕНЬ ПОЗИЦИЙ И ОБОЗНАЧЕНИЙ
1 - корпус;
2 - двигатель;
3 - осевой вентилятор;
4 - ограждение;
5 - камера воздушной подушки;
6 - воздуховод;
7 - мембрана;
8 - носовая изолированная полость;
9 - кормовая изолированная полость;
10 - правого борта изолированная полость;
11 - левого борта изолированная полость;
12 - дроссельная заслонка, соединяющая воздуховод 6 с носовой изолированной полостью 8;
13 - дроссельная заслонка, соединяющая воздуховод 6 с кормовой изолированной полостью 9;
14 - дроссельная заслонка, соединяющая воздуховод 6 с правого борта изолированной полостью 10;
15 - дроссельная заслонка, соединяющая воздуховод 6 с левого борта изолированной полостью 11;
16 - канал;
17 - управляемый клапан;
18 - датчик перегрузки в носовой части АВП;
19 - датчик перегрузки в кормовой части АВП;
20 - датчик угла тангажа;
21 - датчик угла крена;
22 - датчики давления в носовой изолированной полости 8;
23 - датчики давления в кормовой изолированной полости 9;
24 - датчики давления в правого борта изолированной полости 10;
25 - датчики давления в левого борта изолированной полости 11;
26 - вычислитель;
27 - электродвигатель электромеханического привода дросселирующей заслонки 12;
28 - электродвигатель электромеханического привода дросселирующей заслонки 13;
29 - электродвигатель электромеханического привода дросселирующей заслонки 14;
30 - электродвигатель электромеханического привода дросселирующей заслонки 15;
31 - шарико-винтовая передача;
32 - реечный механизм, соединяющий синусно-косинусный вращающийся трансформатор с шарико-винтовой передачей 31.
33 - электродвигатель управляемого клапана 17.
r, r1 r2, rЯ - резисторы, образующие измерительный мост;
rЯ - резистор обмотки якоря электродвигателя;
Uab - напряжение на выходе (между точками a и b) измерительного моста;
Е - ЭДС электродвигателя;
У1 - операционный усилитель для получения обратной связи заданной величины на выходе измерительного моста;
T1, Т2, Т3, Т4 - силовые транзисторы, образующие мост;
Д1 Д2, Д3, Д4 - диодами возвратного тока;
ОД - ограничивающие дроссели с диодами Д5 и Д6;
Т5 и Т6 - транзисторы управления транзисторами Т1, Т2, Т3, Т4;
Т7 и Т8 - транзисторы;
IЯ - выходной ток якоря электродвигателя;
R1 и R2 - безъиндуктивные резисторы;
У2 - суммирующий операционный усилитель;
δU - управляющий сигнал;
ФB - поток возбуждения;
kB - коэффициент потока;
IВ - ток возбуждения;
UB - напряжение возбуждения;
rC, LC - активное сопротивление и индуктивность цепи возбуждения;
CBIP - составляющая напряжения, характеризующая размагничивающее действие ротора;
IP - ток ротора.
ЕP - противоЭДС ротора;
rP, LР - активное сопротивление и индуктивность цепи ротора;
ΩP - частота вращения ротора;
СE - постоянная ЭДС;
МЭМ = вращающий момент электродвигателя;
СМ - коэффициент момента;
МВН - внешний момент на валу электродвигателя;
h - межполюсное расстояние в роторе;
I - момент инерции дросселирующей заслонки, приведенный к общему штоку;
kУ - коэффициент усиления;
N - общее число проводников якоря;
p - число полюсов;
a - число параллельных ветвей;
Т; ζ; m; Тm; kДС - коэффициенты датчика внутренней обратной связи;
kОС - коэффициент главной обратной связи.
Гибридная фоточувствительная схема (гфс)
Коррозионностойкая высокопрочная сталь
Способ изготовления стеклокерамического материала кордиеритового состава
Стенд для определения вращательных производных аэродинамических сил и моментов модели в аэродинамической трубе
Комплект спецодежды
Способ приготовления абразивной массы для высокопористого инструмента
Способ изготовления абразивного инструмента
Пневмосистема для судна с воздушными кавернами на днище
Стенд для измерения массы и координат центра масс изделий
Сплав на основе меди
Способ электрошлаковой выплавки заготовки корпуса с патрубком
Способ выявления кишечных вирусов в клинических образцах и воде методом мультиплексной пцр с детекцией в режиме реального времени и перечень последовательностей для его осуществления
Высокопрочная хладостойкая arc-сталь
Хладостойкая arc-сталь высокой прочности
Выгораемое сопло комбинированного ракетно-прямоточного двигателя
Износостойкий сплав для высоконагруженных узлов трения
Стенд для определения вращательных производных аэродинамических сил и моментов модели в аэродинамической трубе
Концентраторный каскадный фотопреобразователь
Цифровой предохранительный клапан непрямого действия с электроуправлением
Гибридная фоточувствительная схема (гфс)

