Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ МНОГОТОЧЕЧНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ С ВХОДНОЙ КОММУТАЦИЕЙ ДАТЧИКОВ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может применяться для исследования измерительных характеристик и контроля точности работы измерительного устройства многоточечных измерительных систем с входной коммутацией датчиков.
Известен способ контроля адресов коммутаторов датчиков по измеренным значениям отклонения сопротивления прецизионных резисторов от опорного резистора, установленного в измерительном устройстве (Е.Г.Зубов, Ю.С.Ильин, А.И.Лебедева, А.Г.Харченко. Способ определения и автоматического контроля адресов первичных преобразователей в многоканальных измерительно-информационных системах. Труды ЦАГИ, 1984. Вып.2219, с.53-60). Для этого в каждом коммутаторе датчиков устанавливают два прецизионных резистора, сопротивления которых различаются между собой и выбираются из соотношения Ri=120±0,5 i, (i=0, 1, 2,…,9) Ом. В этом соотношении 120 Ом - номинальное сопротивление опорного резистора измерительного устройства. Используя изложенный в статье способ, по измеренным значениям Ri вычисляют номер коммутатора датчиков. Максимальное количество коммутаторов, пронумерованных по этому способу, составляет 361.
Применяемые в известной системе резисторы можно использовать для контроля работы измерительного устройства во всем диапазоне шкалы, если точно знать величины Ri. Однако величина Ri в известной системе задана с погрешностью 0,25 Ом, что обеспечивает требуемую дискретность для нахождения номера коммутатора датчиков, но непригодно для контроля работоспособности измерительного устройства: измерительная система имеет шкалу аналого-цифрового преобразователя ±2000 делений, диапазон измерения ±4,8 Ом, погрешность системы ±0,5%, цена 1 деления равна 2,4 мОм. Для того чтобы обеспечить требуемую точность контроля работоспособности измерительного устройства резисторы, установленные в коммутаторах датчиков, требуется периодически поверять. Для проведения поверки весь парк коммутаторов необходимо транспортировать на стенд, где проводится метрологическая поверка. Это очень трудоемкая процедура.
Поэтому недостатком такого способа контроля работоспособности измерительного устройства является высокая трудоемкость. Если для сокращения трудоемкости контроль работоспособности измерительного устройства производить по двум резисторам, установленным в коммутаторе датчиков, контроль будет неполным из-за того, что не будут контролироваться все разряды аналого-цифрового преобразователя.
Если же по измеренным значениям сопротивления двух резисторов вычислять величину коэффициентов функции преобразования А0 и А1, то погрешность в определении А1 будет равна:
 ,
,
где ΔN1 - случайная составляющая погрешности измерения сопротивления резистора R1,
2 - случайная составляющая погрешности измерения сопротивления резистора R2,
N1 - среднее измеренное значение сопротивления резистора R1 в делениях шкалы аналого-цифрового преобразователя,
N2 - среднее измеренное значение сопротивления резистора R2 в делениях шкалы аналого-цифрового преобразователя, при этом R2>R1.
Знак погрешности зависит от знаков ΔN1 и ΔN2. Если ΔN1 положительная величина, a ΔN2 - отрицательная, то погрешность δ будет со знаком минус, при противоположных знаках ΔN1 и ΔN2 погрешность δ будет иметь знак плюс.
Погрешность в определении А0 будет равна примерно ΔN1.
Таким образом, два резистора не обеспечивают в полной мере контроля работоспособности измерительного устройства. Для удовлетворения всех требований этого контроля необходимо иметь несколько резисторов, сопротивления которых перекрывали бы весь диапазон измерения. Этого можно достичь, подвергая метрологической поверке хотя бы несколько коммутаторов датчиков. Но в этом случае трудоемкость работ возрастает.
Кроме того, при таком способе не обеспечивается контроль работоспособности измерительных устройств, предназначенных для измерения сигналов других типов датчиков: мостовых тензорезисторных датчиков силы, давления, перемещения, термосопротивлений, термопар и др.
Известен способ измерения неэлектрических величин многоточечной измерительной системой с контролем функции преобразования и измерительная система для его осуществления (Патент РФ №2324899, МПК G01D 9/00, 2008 г., выбран в качестве прототипа).
Способ позволяет контролировать точность измерений сигналов датчиков путем сравнения значений коэффициентов функции преобразования измерительной системы, вычисленных при проведении метрологической поверки измерительных каналов системы и вычисляемых по результатам измерений известных заранее значений сигналов формирователя ступеней имитатора. Контроль осуществляется при проведении измерений сигналов датчиков и выходных сигналов формирователя ступеней имитатора.
Недостатком известного способа является необходимость контролировать оба значения коэффициентов функции преобразования: А0 и А1. Это приводит к усложнению в задании допусков на контроль.
При наличии в системе автоматического имитатора сигналов датчиков операторы измерительной системы для повышения точности измерений проводят метрологическую поверку непосредственно перед измерениями сигналов датчиков. В этом случае для использования известного способа требуется дополнительное время на подготовку системы к проведению измерений, обусловленного заменой имитаторов сигналов датчиков формирователями ступеней имитатора в коммутаторах измерительной системы. Кроме того, при проведении метрологической поверки возможны ошибки в определении коэффициентов функции преобразования А0 и А1, которые не контролируются в известном способе. Причиной этих ошибок являются следующие действия обслуживающего персонала ИИС: ошибочное подсоединение к коммутатору датчиков формирователя ступеней имитатора, значения ступеней которого не соответствуют занесенным в компьютер; при подсоединении формирователя ступеней имитатора сигналов датчиков к коммутатору датчиков системы не обеспечивается надежный контакт между разъемами. Кроме того, неконтролируемые неисправности микросхем в коммутаторе имитатора приведут к ошибке измерения соответствующей ступени имитатора. Неверно определенные при метрологической поверке коэффициенты функции преобразования А0 и А1 приведут к существенным погрешностям результатов измерения сигналов датчиков.
Задачей и техническим результатом изобретения являются повышение надежности и упрощение способа контроля работоспособности измерительной системы для обеспечения заданной точности измерений сигналов датчиков и сокращение трудоемкости при подготовке системы к проведению измерений за счет введения в систему второго формирователя ступеней имитатора сигналов датчиков.
Решение поставленной задачи и технический результат для способа контроля работоспособности многоточечной измерительной системы с входной коммутацией датчиков достигаются тем, что к входу коммутатора датчиков подключают формирователь ступеней имитатора сигналов датчиков, соответствующий типу подключаемых датчиков, и измеряют сигналы этого формирователя, по измеренным сигналам формирователя и их известным физическим значениям вычисляют функцию преобразования системы, затем к коммутатору датчиков подсоединяют соответствующий типу подключаемых датчиков второй формирователь ступеней имитатора сигналов датчиков, физические значения сигналов которого заранее известны, измеряют сигналы этого формирователя, по результатам этих измерений и вычисленной функции преобразования системы вычисляют значения сигналов второго формирователя ступеней имитатора и определяют разности с известными их значениями, по величине этих разностей оценивают степень работоспособности системы.
Для осуществления способа на чертеже представлена блок-схема многоточечной измерительной системы с входной коммутацией датчиков.
Многоточечная измерительная система для осуществления способа состоит из первого формирователя ступеней имитатора сигналов датчиков 1, второго формирователя ступеней имитатора сигналов датчиков 2, коммутатора датчиков системы 3 и измерительно-вычислительного блока 4.
Каждый тип формирователей ступеней имитатора сигналов датчиков 1 и 2 предназначен для формирования сигналов определенного типа датчиков: одиночных тензорезисторов, термопар, термометров сопротивления, мостовых тензорезисторных датчиков силы, перемещения, давления и др. Формирователи 1 и 2 выполнены в виде отдельных узлов, которые одновременно формируют все ступени имитации сигналов. Выход каждой ступени имитации сигналов подключен к соответствующему измерительному входу коммутатора датчиков 3. К другим измерительным входам коммутатора 3 подсоединены датчики, которые соответствуют типу формирователей ступеней имитатора сигналов датчиков 1 и 2, подключенных к коммутатору 3. Измерительный выход коммутатора 3 подключен к измерительному входу измерительно-вычислительного блока 4, управляющий выход которого соединен с управляющим входом коммутатора датчиков 3.
Измерительно-вычислительный блок 4 состоит из измерительного устройства, устройства управления, ЭВМ и интерфейса. Измерительно-вычислительный блок 4 предназначен для электропитания датчиков и формирователя ступеней имитатора сигналов датчиков, измерения аналоговых сигналов датчиков и ступеней имитации сигналов датчиков, преобразования аналоговых сигналов в цифровые, передачу измеренных сигналов в цифровом виде через интерфейс в ЭВМ, прием через интерфейс от ЭВМ сигналов управления и формирование управляющих сигналов коммутатором 3. ЭВМ кроме перечисленных функций осуществляет запоминание исходных данных для управления системой и обработки результатов измерений, обработку и представление результатов измерений в виде таблиц и графиков. Измерительно-вычислительный блок 4 описан функционально. Реально каждая конкретная система имеет свою структурную схему, в которой описанные блоки измерения, управления, интерфейса и ЭВМ могут состоять из узлов, которые имеют свои принципиальные схемы и соединены в соответствии с технической документацией на систему. Для реализации предлагаемого способа все эти системы подходят, если выполняются следующие условия: коммутатор датчиков предназначен для подсоединения одиночных тензорезисторов, термосопротивлений и тензорезисторных мостовых датчиков по четырехпроводной схеме (термопары могут подсоединяться по двухпроводной схеме), для одиночных тензорезисторов измеряется отклонение сопротивления тензорезисторов и резисторов формирователя ступеней имитатора сигналов датчиков относительно величины сопротивления опорного резистора, размещенного в измерительном устройстве, исключается влияние емкостей линий связи на точность измерения при максимальном быстродействии системы, для чего питание тензорезисторов осуществляется импульсами тока прямоугольной формы.
Способ осуществляют следующим образом.
При подготовке измерительной системы к проведению измерений формирователи ступеней имитаторов сигналов датчиков 1 и 2 подсоединяют к измерительным входам коммутатора 3. Физические величины ступеней формирователей 1 и 2 представляют собой конструктивно выполненные в диапазоне измерения системы отклонения (со знаком плюс и минус) сопротивлений относительно номинального сопротивления применяемых тензорезисторов, порции напряжения и др. Эти значения ступеней формирователей 1 и 2 определены заранее с заданной точностью. К другим измерительным входам коммутатора 3 подсоединяют датчики того же типа, что и формирователи ступеней имитаторов сигналов датчиков 1 и 2.
В ЭВМ вводят адреса и исходные данные для датчиков и ступеней формирователей 1 и 2, определенные заранее значения ступеней формирователей 1 и 2. Вводят программу измерений и последовательно измеряют в одном цикле опроса сигналы датчиков, подключенных к измерительным входам коммутатора 3, и сигналы ступеней формирователей 1 и 2. Для повышения точности измерения рекомендуется проводить измерения не за один, а за несколько циклов опроса каналов коммутатора 3. По измеренным величинам известных значений ступеней формирователя 1, имитирующих сигналы датчиков, вычисляют коэффициенты функции преобразования системы. Функция преобразования системы может быть линейная и нелинейная. Предлагаемый способ контроля справедлив как для линейной, так и для нелинейной функции преобразования. Например, с помощью формирователя 1 ступеней имитатора сигналов одиночных тензорезисторов будет определена линейная функция преобразования системы:

где Ni1 - показание i-й ступени формирователя 1 в кодах,
А0 и A1 - коэффициенты функции преобразования,
ΔRi1 - заранее определенное значение для i-й ступени формирователя 1 отклонение (со знаком плюс или минус) сопротивления относительно номинального сопротивления тензорезисторов.
Результаты измерений каждого цикла (циклов) обрабатывают и вычисляют физические величины по показаниям датчиков и ступеням формирователя 2.
Для i-й ступени формирователя 2 с учетом коэффициентов А0 и A1 функции преобразования (1) измеренное значение:

где Ni2 - измеренное значение i-й ступени формирователя 2 в кодах,
А0 и A1 - коэффициенты функции преобразования,
ΔRi2 - заранее определенное значение отклонения сопротивления для i-й ступени формирователя 2 относительно номинального сопротивления тензорезисторов.
Для каждой i-й ступени формирователя 2 из формулы (2) вычисляем ΔRi2

Если коэффициент усиления и (или) ноль измерительного устройства системы не изменились за время цикла измерения, то вычисленное значение ΔRi2 будет равно (в пределах погрешности измерения системы) заранее определенному значению отклонения сопротивления для i-й ступени формирователя 2 относительно номинального сопротивления тензорезисторов.
Если коэффициент усиления и (или) ноль измерительного устройства системы изменились за время цикла измерения, то по измеренным сигналам известных значений ступеней формирователя 1 будет вычислена функция преобразования системы с другими коэффициентами А01 и A11. С учетом новых коэффициентов А01 и А11 измеренное значение для i-й ступени формирователя 2 Ni21 будет отличаться от значения Ni2 в формуле (2). А поскольку при вычислении значения ΔRi2 в формуле (3) будут использованы старые значения А0 и А1 коэффициентов функции преобразования, а значение Ni21 будет отличаться от значения Ni2, то значение величины отклонения сопротивления для i-й ступени формирователя 2 относительно номинального сопротивления тензорезисторов ΔRi21 будет отличаться от истинного значения ΔRi2 на величину

Находят разности ΔRi для каждой i-й ступени формирователя 2, из них определяют максимальное значение ΔRi max, по величине которого судят о состоянии измерительного тракта системы, оценивая степень ее работоспособности, и принимают решение о дальнейшем использовании системы.
Например, при нарушении условия:

где ΔRис - допустимая погрешность измерения приращения сопротивления системы, проведение измерений сигналов датчиков останавливают и осуществляют поиск неисправностей в системе, либо при несущественном нарушении, основываясь на особенностях и важности конкретных испытаний, могут принять решение о продолжении их до конца.
Аналогичные операции производят для формирователей ступеней имитации сигналов других датчиков (мостовых тензорезисторных датчиков силы, перемещения, давления, термопар, термометров сопротивления и др.).
Применение изобретения позволит упростить способ контроля, повысить надежность контроля работоспособности измерительного устройства для обеспечения измерения сигналов датчиков с заданной точностью и сократить время подготовки к проведению измерений многоточечной измерительной системы с входной коммутацией датчиков.
Способ контроля работоспособности многоточечной измерительной системы с входной коммутацией датчиков, заключающийся в том, что к входу коммутатора датчиков подключают формирователь ступеней имитатора сигналов датчиков, соответствующий типу подключаемых датчиков, и измеряют сигналы этого формирователя, по измеренным сигналам формирователя и их известным физическим значениям вычисляют функцию преобразования системы, отличающийся тем, что к коммутатору датчиков подсоединяют соответствующий типу подключаемых датчиков второй формирователь ступеней имитатора сигналов датчиков, физические значения сигналов которого заранее известны, измеряют сигналы этого формирователя, по результатам этих измерений и вычисленной функции преобразования системы вычисляют значения сигналов второго формирователя ступеней имитатора и определяют разности с известными их значениями, по величине этих разностей оценивают степень работоспособности системы.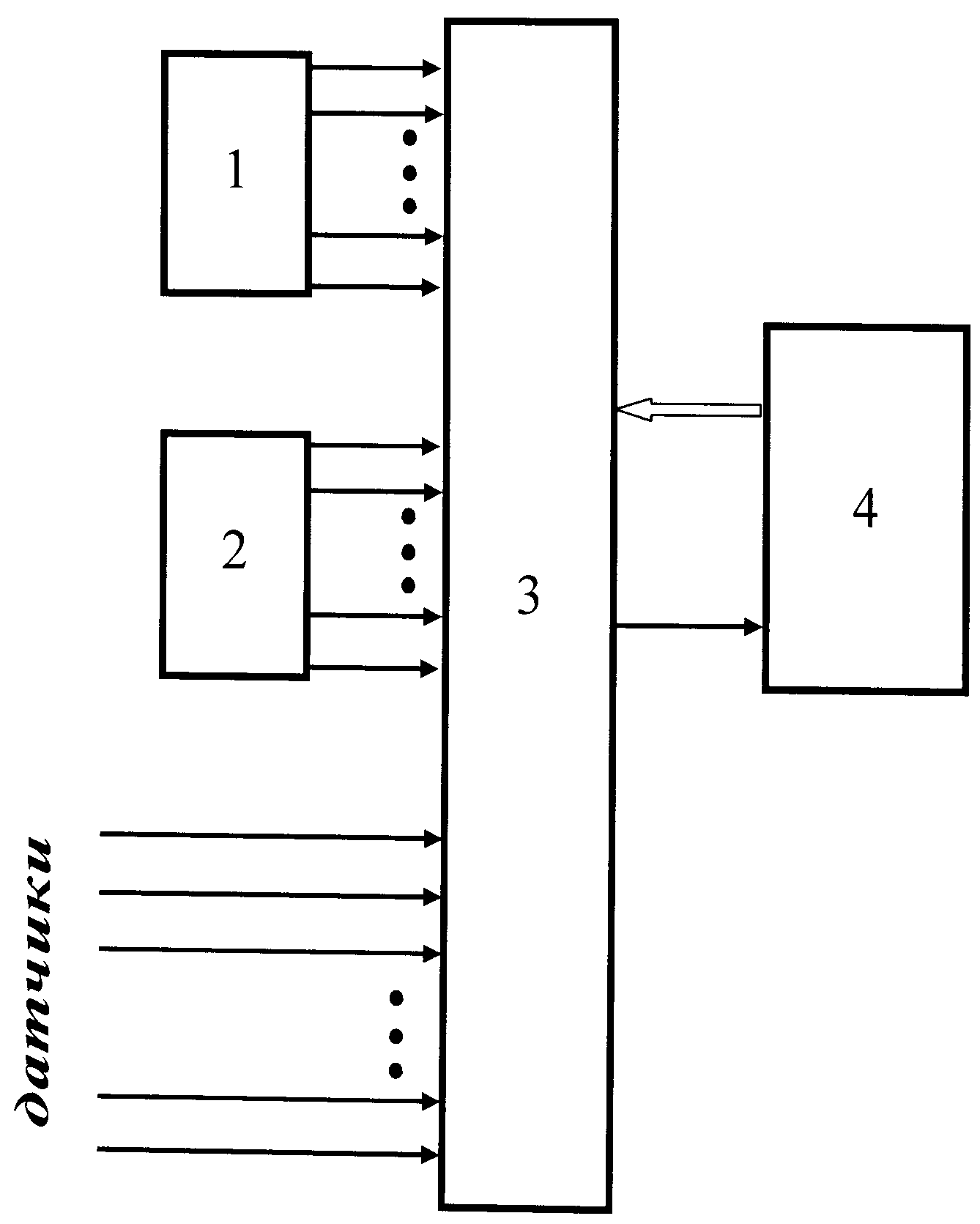
Способ управления упругими изгибными и крутильными деформациями несущей поверхности и устройство для его реализации
Устройство для улучшения вывода самолета из штопора
Динамически подобная аэродинамическая модель несущей поверхности летательного аппарата
Регулятор давления воздуха в форкамере аэродинамической трубы с форсированным выходом на заданный режим
Аэроупругая модель
Регулятор давления воздуха в форкамере аэродинамической трубы
Аэродинамический профиль крыла
Многоканальный преобразователь приращения сопротивления резистивных датчиков в напряжение
Вибровозбудитель колебаний механических конструкций
Способ подготовки газа для исследований в гиперзвуковой аэродинамической трубе и устройство для его осуществления (варианты)
Динамически подобная аэродинамическая модель несущей поверхности летательного аппарата
Регулятор давления воздуха в форкамере аэродинамической трубы с форсированным выходом на заданный режим
Аэроупругая модель
Регулятор давления воздуха в форкамере аэродинамической трубы
Аэродинамический профиль крыла
Многоканальный преобразователь приращения сопротивления резистивных датчиков в напряжение
Вибровозбудитель колебаний механических конструкций
Способ подготовки газа для исследований в гиперзвуковой аэродинамической трубе и устройство для его осуществления (варианты)
Устройство защиты полых изделий от превышения заданной величины внутреннего избыточного давления газа
Пятикомпонентные тензовесы

