Результат интеллектуальной деятельности: ВИБРОВОЗБУДИТЕЛЬ КОЛЕБАНИЙ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ
Вид РИД
Изобретение
Изобретение относится к области авиастроения, ракетостроения, машиностроения, строительства мостов и высотных сооружений, в частности к экспериментальным исследованиям динамической устойчивости различных объектов как в натурных условиях эксплуатации, так и методом моделирования в аэродинамических трубах (АДТ) на динамически подобных моделях.
Особенно актуально изобретение для прогнозирования флаттера (как катастрофического явления) при испытаниях в АДТ аэродинамических динамически подобных моделей (ДПМ) несущих поверхностей летательных аппаратов (крыла, киля, стабилизатора) на больших дозвуковых скоростях потока и в трансзвуковом диапазоне чисел Маха (0,8÷1,2).
Целью применения силовозбудителей при испытаниях ДПМ в АДТ является исследование ее основных динамических характеристик (собственных частот, форм колебаний и коэффициентов демпфирования) при изменении скорости потока (числа Маха) и скоростного напора для прогнозирования по полученным данным границы области возникновения флаттера и соответственно в итоге определения допустимых безопасных режимов полета натурного ЛА.
Как известно, для создания возбуждающих колебания сил применяются различные типы вибровозбудителей: электродинамические, инерционные, струйные, пружинно-эксцентриковые и др. Основное требование, предъявляемое к ним, состоит в том, чтобы при передаче на конструкцию необходимых усилий они не оказывали существенного влияния на ее массово-инерционные, жесткостные и демпфирующие характеристики. Как правило, они имеют большой вес и крупные габариты и поэтому в большинстве случаев размещаются вне испытываемого объекта.
Известна полезная модель устройство для возбуждения механических колебаний (патент РФ №151220, МПК В06В 1/16, опубл. 27.03.2015) инерционного типа, которое помимо перечисленных выше недостатков является устройством кругового действия (вращающегося вектора силы), что неприемлемо для возбуждения и анализа колебаний ДИМ несущих поверхностей в потоке АДТ.
Наиболее широкое применение в практике проведения наземных частотных испытаний авиационных и ракетных конструкций нашли электродинамические силовозбудители направленного действия (Микишев Г.Н., Рабинович Б.И. Динамика тонкостенных конструкций с отсеками, содержащими жидкость. - М.: Машиностроение, 1979). Однако эти устройства имеют большие габариты, они относительно тяжелые по сравнению с трансзвуковыми динамически подобными моделями ЛА и при проведении частотных испытаний устанавливаются на неподвижном основании или подвешиваются на тросах.
Известны устройства импульсного (ударного) воздействия на элементы конструкции для возбуждения свободных колебаний моделей при испытаниях в АДТ, которые приводятся в действие с помощью пневмоприводов и электромагнитов (Бисплингхофф Р.А., Эшли X., Халфмэн Р.Л. Аэроупругость. - М.: Издательство иностранной литературы, 1958). Недостатками этих устройств являются:
- ограниченный объем информации (количества и качества возбуждаемых в потоке собственных тонов колебаний модели) для достоверного прогнозирования критической скорости и формы флаттера при испытаниях модели на безопасных докритических режимах,
- большие габариты пневмоприводов для получения необходимых усилий возбуждения колебаний модели и, как следствие, размещение их вне модели в потоке,
- большой вес электромагнитных приводов, что приводит к нарушению условия массового подобия модели при установке привода внутри модели,
- недостаточные усилия на штоке для совершения импульсного (ударного) воздействия, например, на элерон модели консоли крыла при проведении испытаний в АДТ на больших скоростных напорах.
Известно устройство для возбуждения колебаний модели в аэродинамической трубе и механизм передачи возвратно-поступательного перемещения (Патент №1172362, МПК G01M 9/08, G01M 7/00, опубл. 1994). Устройство содержит силовой привод в виде электродинамического возбудителя, помещенный в обтекаемый корпус, закрепленный на стойке с помощью упругого шарнира. Стойка закреплена неподвижно на стенке рабочей части АДТ за моделью. Усилие от вибровозбудителя передается на модель через упругую тонкую и гибкую тягу, перпендикулярную плоскости хорд и находящуюся в потоке, посредством механизма передачи возвратно-поступательного перемещения штока электродинамического возбудителя.
Недостатками устройства являются:
- большие габариты, расположение в потоке за моделью и, как следствие, нарушение структуры потока, обтекающего модель, при испытании модели на больших дозвуковых и трансзвуковых скоростях,
- сложная многоэлементная конструкция устройства, имеющая широкий спектр собственных колебаний, являющихся «паразитными» тонами для испытываемой модели в АДТ,
- увеличение коэффициента демпфирования модели за счет повышения конструкционного трения в устройстве при действии на него статической аэродинамической нагрузки и изменения температуры потока в рабочей части во время пуска АДТ.
Задачей изобретения является разработка конструкции малогабаритного внутримодельного силовозбудителя сравнительно небольшого веса и направленного действия, обеспечивающего возбуждение в потоке в требуемом диапазоне частот вынужденных собственных колебаний ДПМ несущих поверхностей как в направлении, перпендикулярном плоскости хорд, так и в плоскости хорд, а также изменение закона возбуждающей силы (гармоническое, полигармоническое и случайное возбуждение) для экспериментальных исследований характеристик флаттера на докритических режимах потока (чисел Маха и скоростного напора) в трансзвуковых и сверхзвуковых АДТ.
Техническим результатом является расширение экспериментальных возможностей по исследованию явлений динамической аэроупругости модели с сохранением условий подобия по массовым, жесткостным и геометрическим характеристикам без нарушения структуры потока, обтекающего модель.
Техническим результатом является повышение точности измерения собственных частот, форм колебаний и коэффициентов демпфирования колебаний модели при изменении числа Маха и скоростного напора для прогнозирования по полученным данным границы области флаттера.
Решение поставленной задачи и технический результат достигается тем, что в вибровозбудителе колебаний механических конструкций, состоящем из корпуса, силового привода, упругих шарниров, штока, соединенного с упругой тягой, шток силового привода соединен упругой тягой с подвижной платформой со сменным грузом, которая установлена на упругом шарнире, состоящем из двух пересекающихся под углом 90° упругих пластин, соединяющих подвижную платформу с корпусом, при этом силовой привод установлен на другом упругом шарнире, имеющем вид равнобедренной трапеции, нижнее основание которой закреплено на основании корпуса, а на ее верхнем основании закреплен силовой привод, причем при продолжении сторон трапеции образуется угол, находящийся в диапазоне 70-100°, при этом его вершина расположена на оси штока силового привода, которая перпендикулярна геометрической оси колебаний упругого шарнира.
Решение поставленной задачи и технический результат достигается также тем, что в вибровозбудителе колебаний механических конструкций корпус устройства, состоящий из жестких стенки и основания, имеет L-образную форму в поперечном сечении с ребрами жесткости в крайних сечениях и с посадочными местами для крепления к силовому элементу внутри модели (лонжерону или кессону) либо стенкой, либо основанием для изменения направления возбуждающей силы на 90°.
Решение поставленной задачи и технический результат достигается также тем, что в вибровозбудителе колебаний механических конструкций тяга, соединяющая шток привода и подвижную платформу, представляет собой плоскую тонкую пластину с вырезом посредине для штока силового привода и две поперечные усиленные стенки для соединения штока привода со стенкой подвижной платформы.
Решение поставленной задачи и технический результат достигается также тем, что в вибровозбудителе колебаний сменный груз, установленный на подвижную платформу, состоит из набора съемных пластин, изготовленных из материалов с различным удельным весом.
Решение поставленной задачи и технический результат достигается также тем, что в вибровозбудителе колебаний в качестве силового привода установлен гидроцилиндр.
Решение поставленной задачи и технический результат достигается также тем, что в вибровозбудителе колебаний упругий шарнир, имеющий вид равнобедренной трапеции, состоит из двух элементов в виде z-образных пружин.
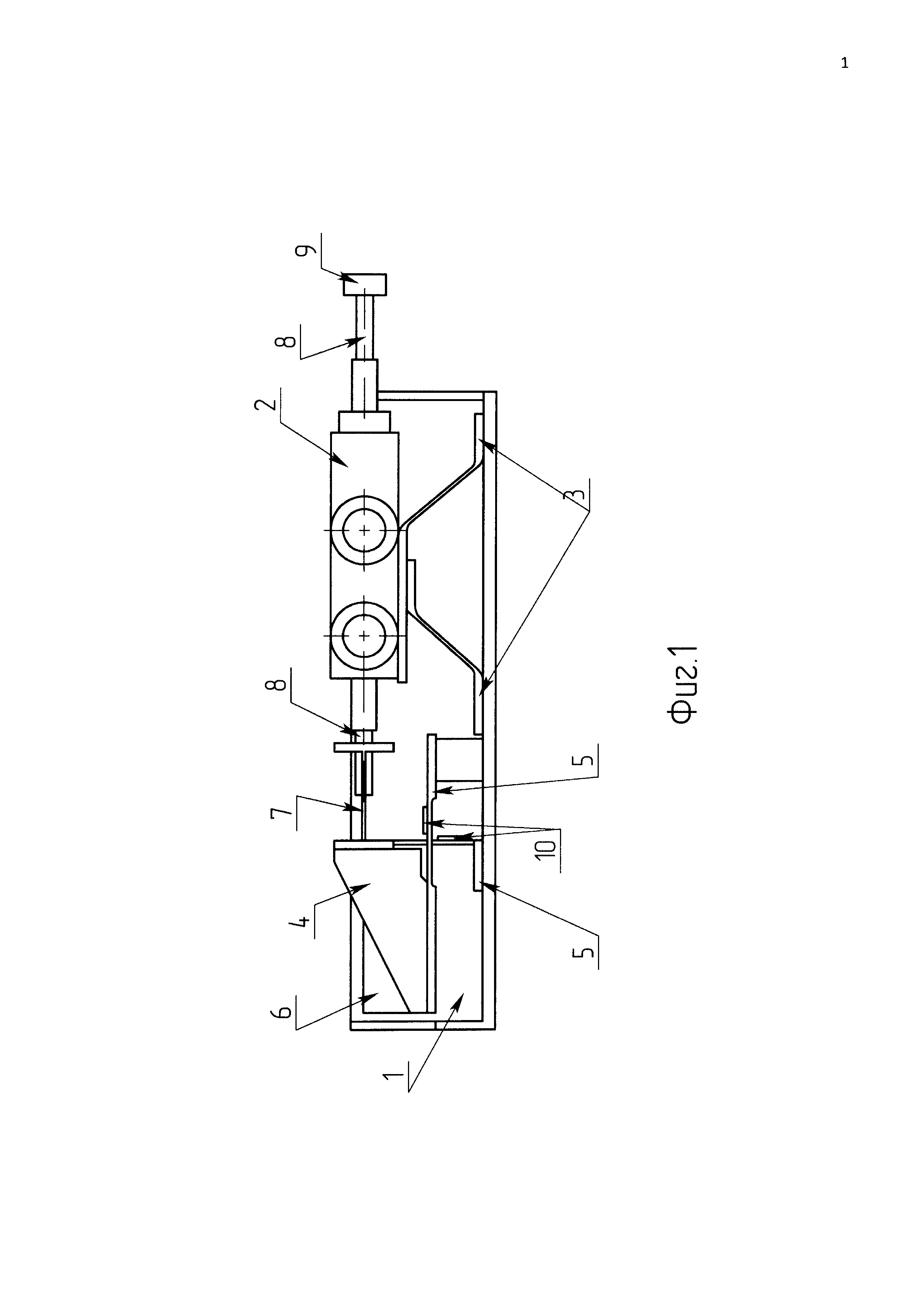
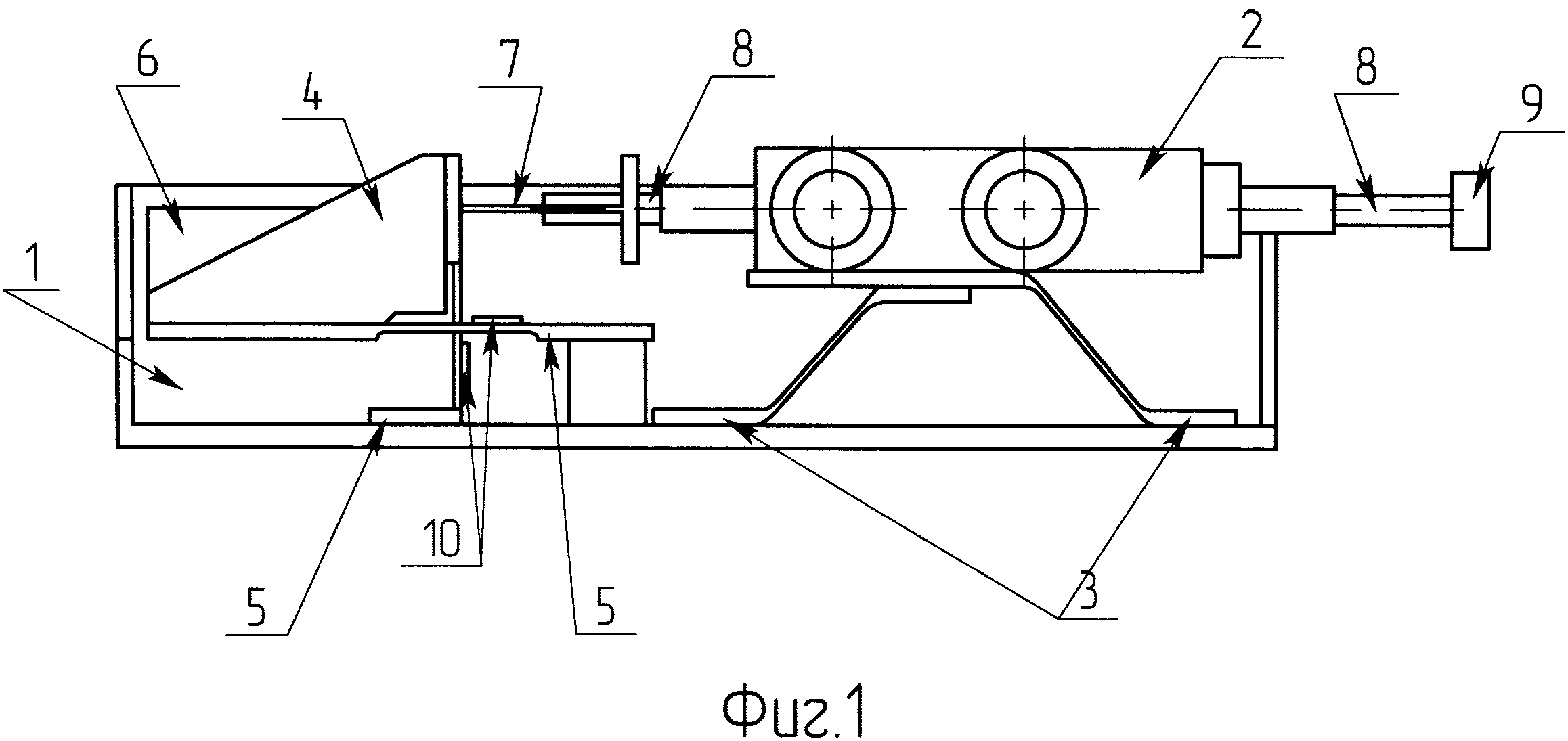
На фиг. 1 представлен общий вид устройства для возбуждения вынужденных колебаний динамически подобных моделей.
На фиг. 2 схемы размещения вибровозбудителя в ДПМ консоли крыла.
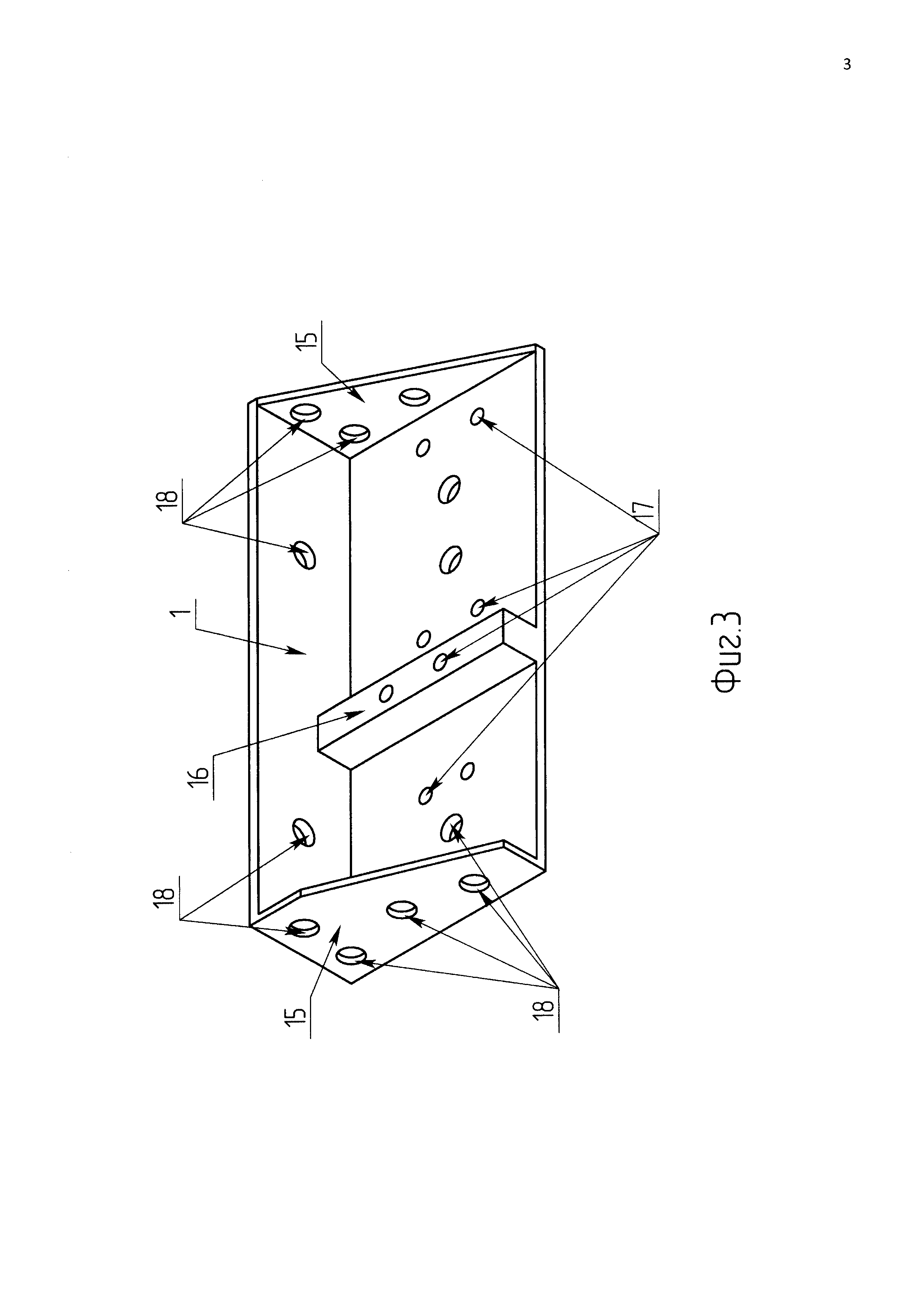
На фиг. 3 представлен жесткий корпус вибровозбудителя.
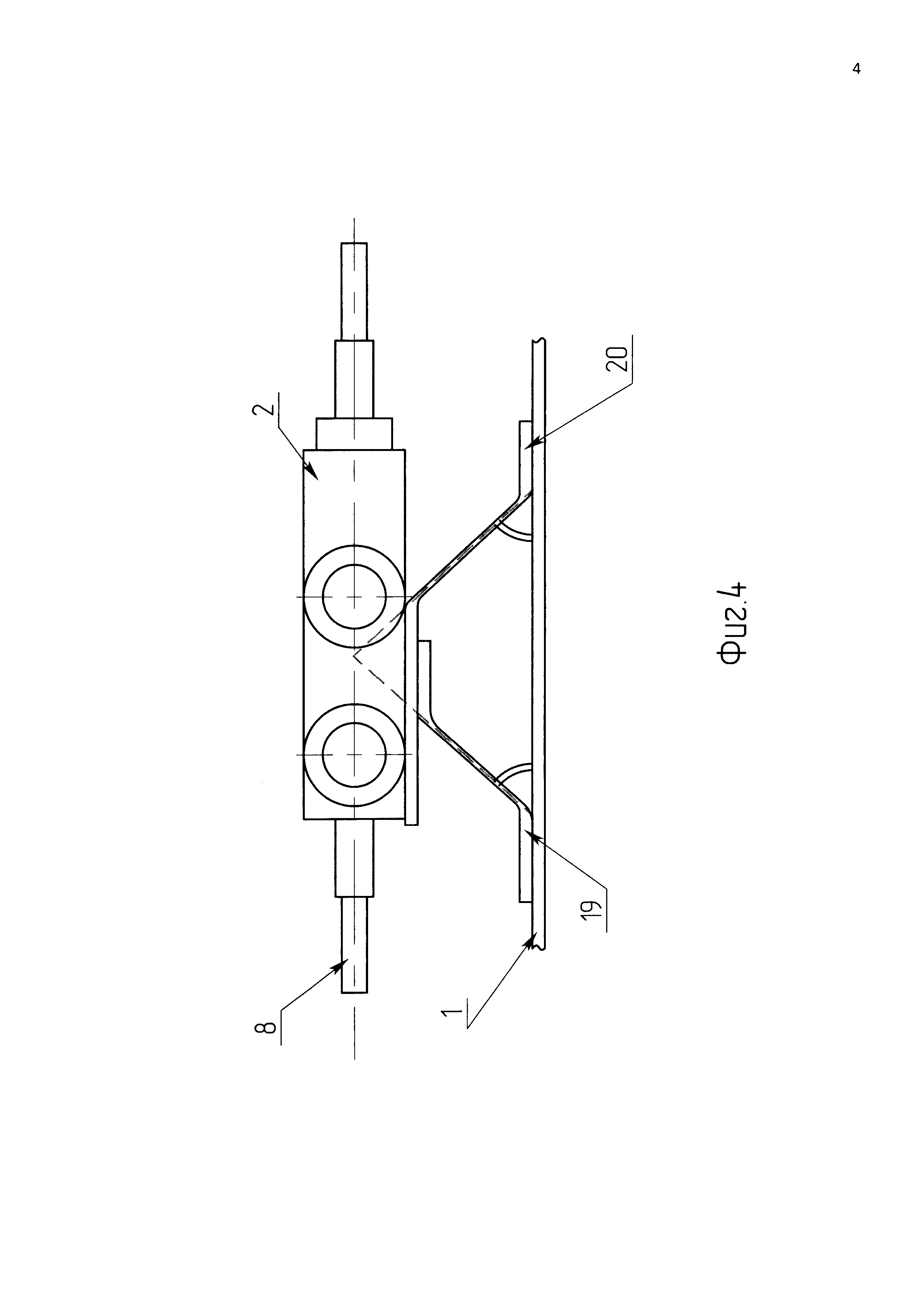
На фиг. 4 представлен упругий шарнир гидропривода.
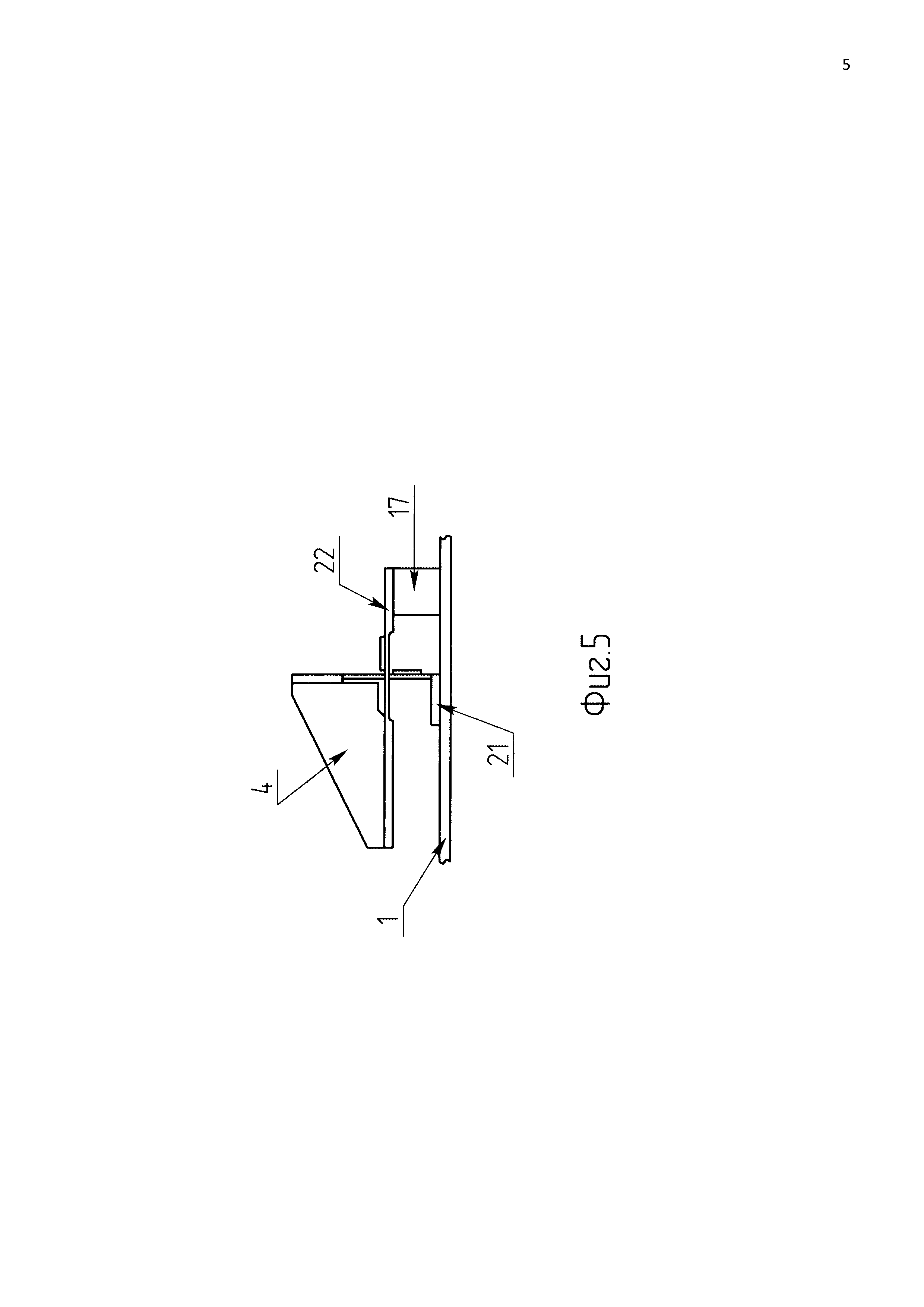
На фиг. 5 представлен упругий шарнир подвижной платформы.
На фиг. 6 представлена упругая тяга.
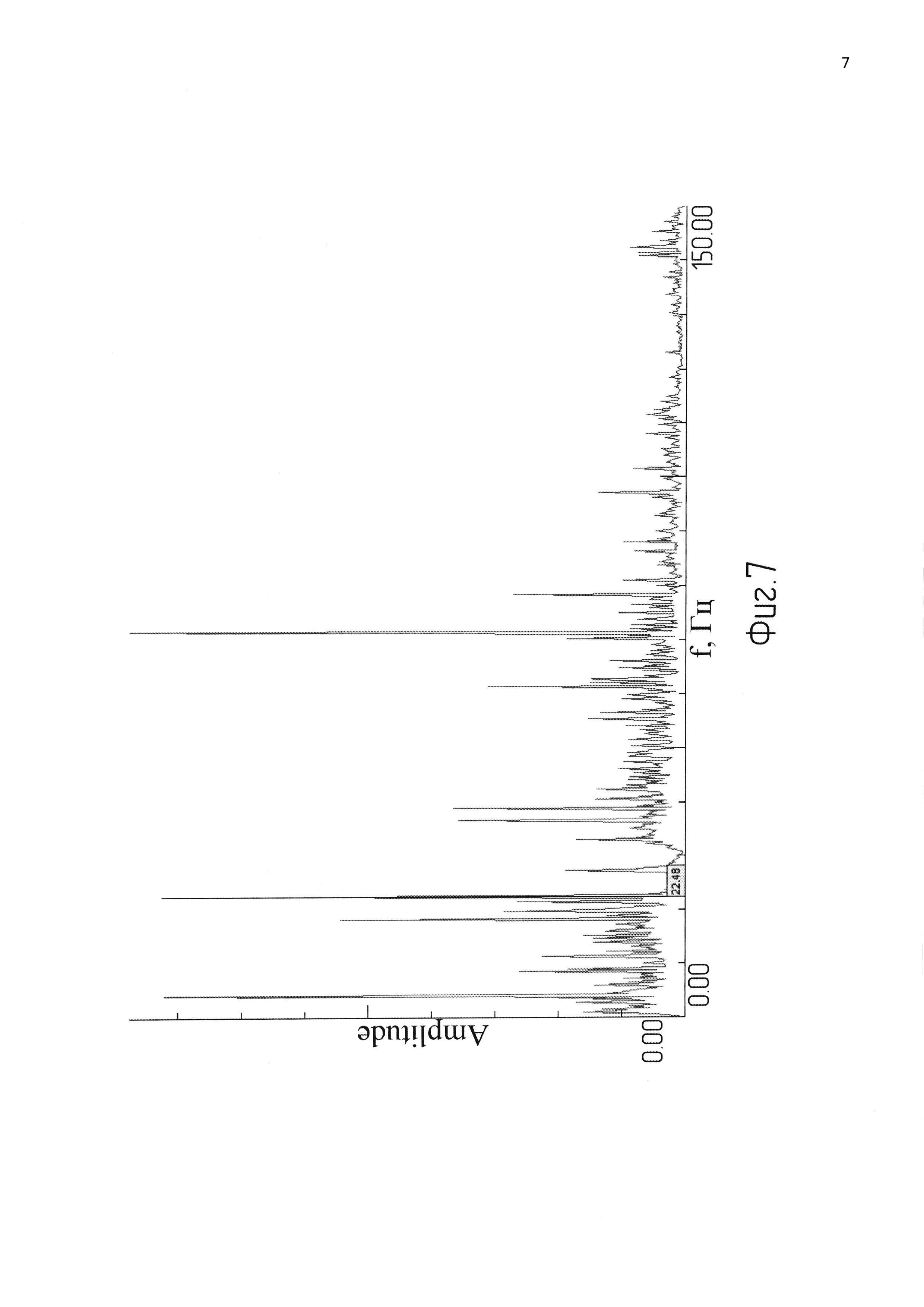
На фиг. 7 представлена амплитудно-частотная характеристика колебаний модели в потоке.
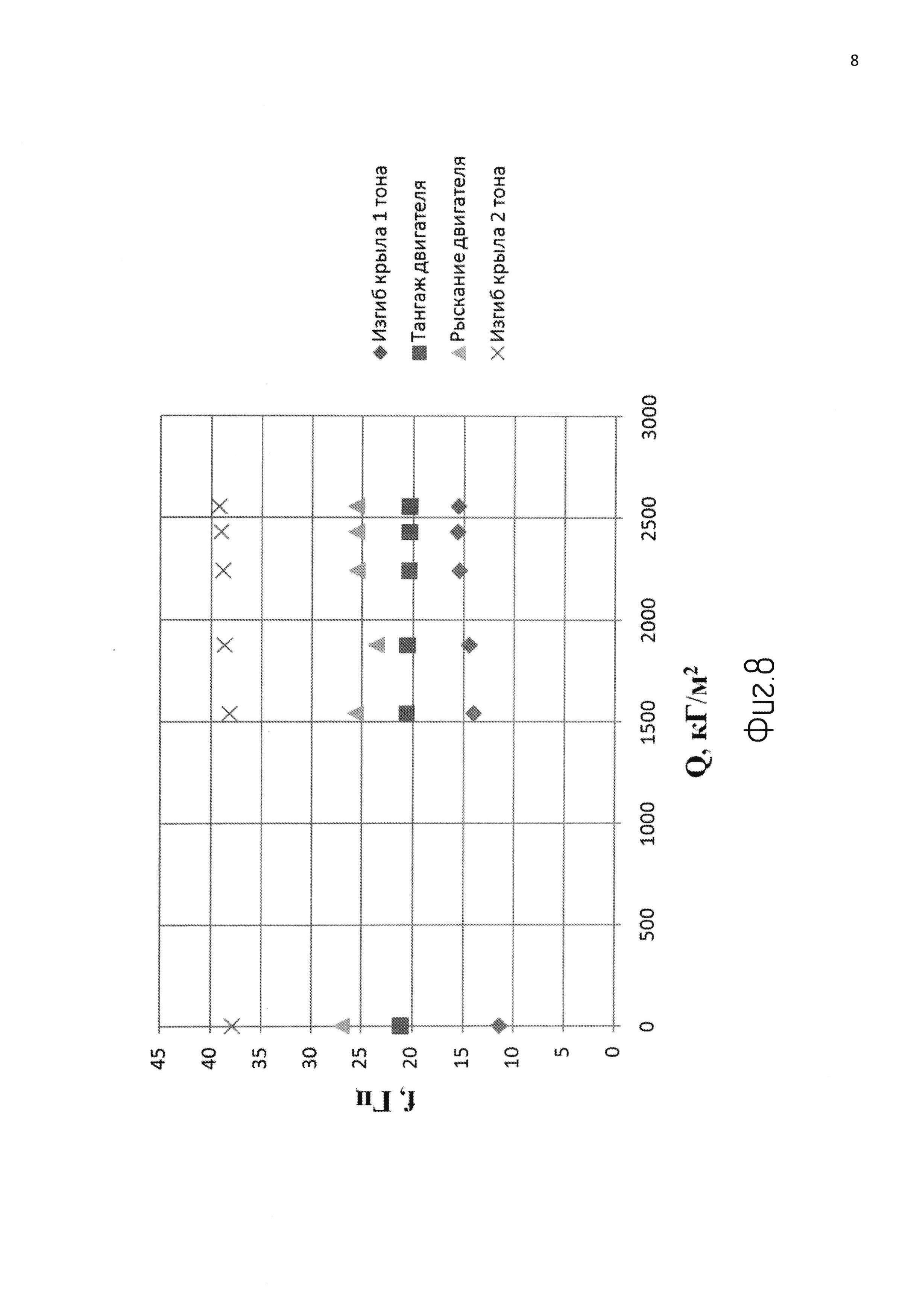
На фиг. 8 приведены зависимости собственных частот колебаний конструкции от величины скоростного напора потока.
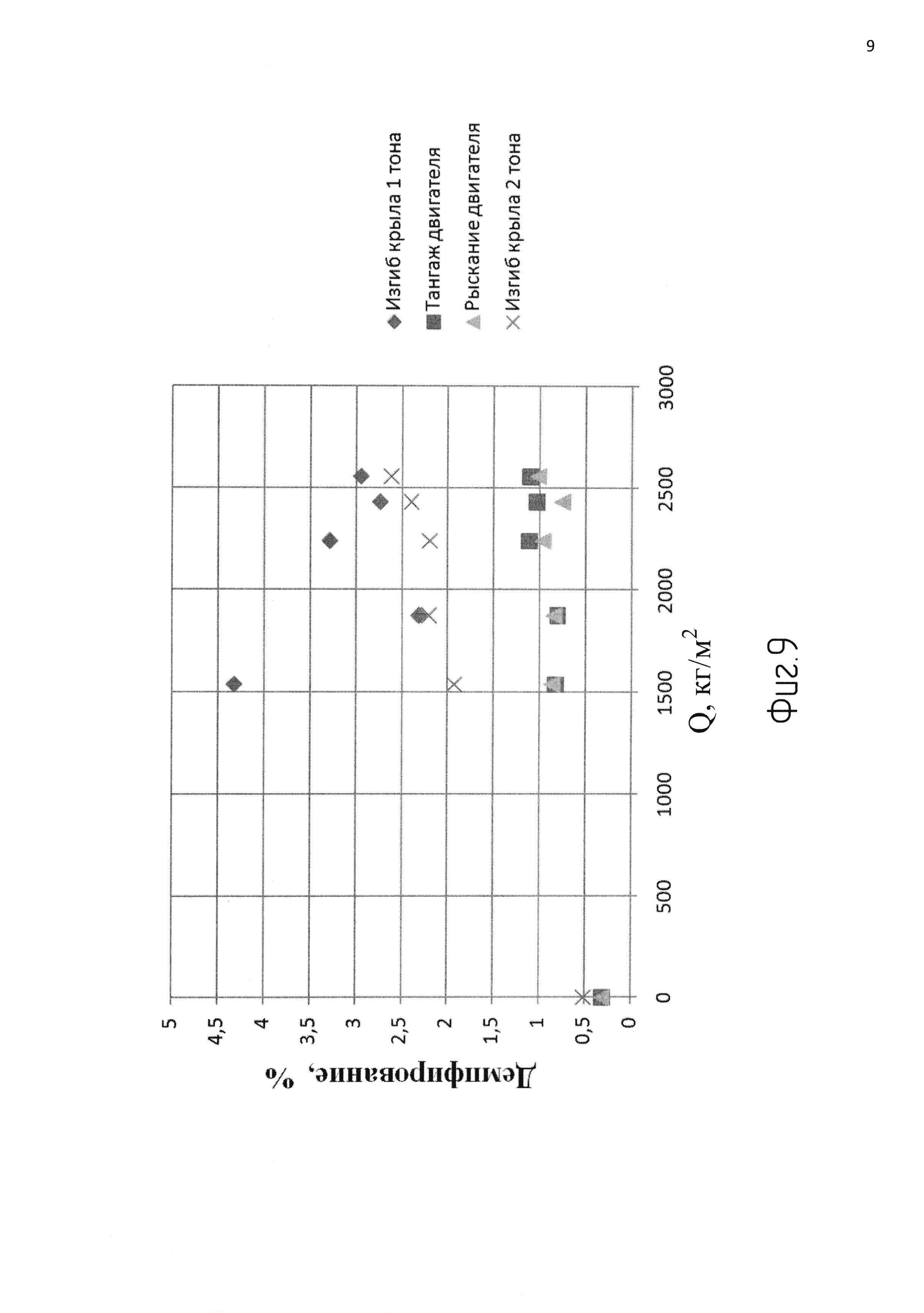
На фиг. 9 приведены зависимости коэффициентов демпфирования от величины скоростного напора потока.
На фиг. 10 представлен прогноз границы флаттера.
Вибровозбудитель (фиг. 1) состоит из жесткого корпуса 1, силового привода, выполненного, например, в виде гидроцилиндра 2, установленного на упругом шарнире 3, подвижной платформы 4, установленной на упругом шарнире 5, сменного груза 6, закрепленного на подвижной платформе 4, и упругой тяги 7, соединяющей шток 8 гидроцилиндра 2 и платформу 4, акселерометра 9, установленного на конце штока 8 гидроцилиндра 2, тензометров 10 наклеенных на стойки упругого шарнира 5.
На фиг. 2 изображена схема установки вибровозбудителя 11 в ДПМ консоли крыла. Вибровозбудитель 11 подсоединен к блоку управления 12 с помощью гидротрассы 13, идущей от гидроцилиндра 2, и кабеля 14, идущего от тензометров 10, акселерометра 9 и гидроцилиндра 2.
Жесткий корпус 1 (фиг. 3) представляет из себя в поперечном сечении L-образную форму с ребрами жесткости 15 в крайних сечениях с приливом 16, расположение которого выбирают в зависимости от относительных размеров внутренних элементов конструкции, и посадочными местами 17 для крепления упругих шарниров 3 и 5 и местами 18 для крепления к силовому элементу (лонжерону или кессону) либо стенкой, либо основанием для изменения направления возбуждающей силы на 90°.
Упругий шарнир 3 имеет вид равнобедренной трапеции, нижнее основание которой закреплено на основании корпуса, а на ее верхнем основании закреплен гидроцилиндр 2 (силовой привод) (фиг. 1, 4). При продолжении сторон трапеции получается равнобедренный треугольник, угол при вершине которого выбирается в диапазоне 70-100°, а его вершина расположена на оси штока силового привода таким образом, чтобы геометрическая ось колебаний гидроцилиндра 2 на упругом шарнире 3 пересекалась с осью штока привода и была к ней перпендикулярна. Упругий шарнир 3, может состоять из двух Z-образных пластин 19 и 20 в сборе, закрепленных на основании корпуса 1.
Подвижная платформа вибровозбудителя (фиг. 5) установлена на упругом шарнире 5, состоящем из двух пересекающихся под углом 90° упругих пластин 21 и 22, одна из которых 22 расположена параллельно основанию корпуса 1 и одним концом крепится к приливу 17 основания корпуса 1 устройства, а другим - к нижней поверхности подвижной платформы 5, расположенной параллельно основанию корпуса 1, вторая упругая пластина 21 расположена перпендикулярно основанию корпуса 1 и одним концом крепится к его основанию, а другим - к поверхности подвижной платформы 4, перпендикулярной основанию корпуса 1.
Упругая тяга 7 (фиг. 1, 6), соединяющая шток 8 гидроцилиндра 2 и стенку подвижной платформы 4, перпендикулярной штоку 8 гидроцилиндра 2, состоит из двух поперечных усиленных стенок и плоской тонкой пластины с вырезом посредине для размещения штока 8 гидроцилиндра 2 и тяги 7 в одной плоскости, для регулирования штока 8 гидроцилиндра 2 со стенкой подвижной платформы 4 и уменьшения габаритов вибровозбудителя.
Груз 6 (фиг. 1, 6) изготавливают в виде пластин из материалов с различным удельным весом для изменения характеристик вибровозбудителя и обеспечения максимально компактных габаритов.
Описание работы при эксперименте в АДТ.
Процедура испытаний модели заключается в том, что сначала модель с встроенным вибровозбудителем колебаний механических конструкций устанавливают в рабочей части АДТ, затем устройство с помощью гибких гидравлических трасс 13 и кабелей 14 подсоединяют к блоку управления 12. Разработанная кинематическая схема и конструкция вибровозбудителя обеспечивают преобразование продольно-поступательного движения штока 8 гидроцилиндра 2 в плоскости хорд модели несущей поверхности в колебания инерционной массы в направлении, перпендикулярном плоскости хорд модели. При этом в системе отсутствуют люфты и трение. Рабочая жидкость подается по гидротрассе 13 в гидропривод 2 под давлением из расположенного вне контура АДТ блока управления 12. Вибровозбудитель управляется дистанционно из кабины управления АДТ. Требуемые диапазоны частот и законы изменения возбуждающей силы задают с помощью блока управления 12.
Перед пуском АДТ выполняют контрольную проверку функционирования всех подсистем (в «наземных» условиях). Для этого включают вибровозбудитель 11, затем определяют в заданном диапазоне частот амплитудно-частотные характеристики модели и регистрируют сигналы с датчиков. Далее выполняют программу испытаний. Каждый пуск АДТ выполняют по заданной траектории q(M) (M - число Маха, q - скоростной напор) в соответствии с программой испытаний. Пуск выполняют в пошаговом режиме. На заранее заданных фиксированных числах M включают вибровозбудитель и в заданном диапазоне частот вынужденных колебаний модели регистрируют сигналы с установленных датчиков. Для уменьшения погрешностей при обработке сигналов включение устройства и регистрацию сигналов выполняют несколько раз. Обработку и анализ полученной информации выполняют после пуска АДТ. Также после каждого пуска АДТ проводят контрольные частотные испытания модели и по результатам сравнения динамических характеристик модели до и после пуска принимают решение о пригодности модели для продолжения испытаний.
В ЦАГИ спроектирована и изготовлена трансзвуковая ДПМ крыла большого удлинения с установленным вибровозбудителем колебаний. Модель успешно прошла испытания на флаттер в трансзвуковой АДТ в диапазоне чисел М=0,3÷1,05.
На фиг. 7 представлена амплитудно-частотная характеристика модели в потоке в диапазоне частот от 0 до 150 Гц при возбуждении колебаний модели силовозбудителем. На фиг. 8 и 9 приведены зависимости собственных частот колебаний f (Гц) и коэффициентов демпфирования основных форм колебаний ДПМ от величины скоростного напора потока Q (кг/м2). По полученным данным выполнен прогноз границы флаттера, результаты которого показаны на фиг. 10.
Применение вибровозбудителя обеспечивает расширение диапазона возбуждаемых в потоке собственных колебаний ДПМ до 200 Гц, что обеспечивает увеличение количества исследуемых «чистых» тонов собственных колебаний ДПМ в 1,5÷2 раза больше, чем у прототипа и отсутствие в данном диапазоне частот «паразитных» (лишних) тонов резонансных колебаний элементов конструкции силовозбудителя, что повышает точность измерения собственных частот, форм колебаний и коэффициентов демпфирования колебаний.
В результате многократное повышение информативности и точности эксперимента позволяет на основании полученных качественно новых результатов по влиянию на динамические характеристики модели числа Маха и скоростного напора определить границу области флаттера, верифицировать математическую модель ДПМ и значительно увеличить объем более дешевых расчетных параметрических исследований для выдачи рекомендаций по обеспечению безопасности от флаттера натурного ЛА в процессе эксплуатации.
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Измерительное устройство
Способ фрезерования на станках с чпу моделей лопаток роторов газотурбинных двигателей
Система управления самолётом
Способ создания потока газа в гиперзвуковой вакуумной аэродинамической трубе и аэродинамическая труба
Аэродинамический стенд для проведения фундаментальных исследований по генерации электроэнергии мгд-методами с использованием в качестве рабочего газа высокотемпературного водорода (h)
Треугольное крыло для сверхзвуковых летательных аппаратов
Предкрылок крыла самолета и способ его обтекания
Устройство для локального подвода энергии к потоку воздуха, обтекающего объект (варианты)
Способ измерения негерметичности изделий
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Измерительное устройство
Способ фрезерования на станках с чпу моделей лопаток роторов газотурбинных двигателей
Система управления самолётом
Способ создания потока газа в гиперзвуковой вакуумной аэродинамической трубе и аэродинамическая труба
Аэродинамический стенд для проведения фундаментальных исследований по генерации электроэнергии мгд-методами с использованием в качестве рабочего газа высокотемпературного водорода (h)
Треугольное крыло для сверхзвуковых летательных аппаратов
Предкрылок крыла самолета и способ его обтекания
Устройство для локального подвода энергии к потоку воздуха, обтекающего объект (варианты)
Способ измерения негерметичности изделий

