Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ ГИДРОДИНАМИЧЕСКОЙ СИЛЫ И ЕЕ МОМЕНТА ПРИ ВЫПОЛНЕНИИ СЛОЖНОГО МАНЕВРИРОВАНИЯ СУДНА
Вид РИД
Изобретение
Изобретение относится к водному транспорту и может быть использовано для прогнозирования движения судна при выполнении им сложного маневрирования при швартовке или динамическом позиционировании.
Совершенствование управления судном, выполняющим сложное маневрирование, достигается путем прогнозирования его движения методом компьютерного моделирования с использованием математической модели судна.
Эффективность и безопасность выполнения сложного маневрирования зависят от наличия необходимой информации, позволяющей адекватно оценить характер поведения судна при воздействии на него внутренних или внешних управляющих воздействий. В качестве управляющих воздействий, в данном случае, рассматриваются воздействия в виде сил и моментов, образуемых в результате работы движительно-рулевого комплекса судна или движительно-рулевых комплексов вспомогательных (внешних) средств управления, например буксиров.
Прогнозировать поведение судна при выполнении сложного маневрирования в результате управляющих воздействий невозможно без определения значений гидродинамических сил и моментов, образующихся на корпусе судна при его движении.
Известен способ определения поперечной гидродинамической силы и ее момента, образующихся на корпусе судна при его движении [1]. Данный способ наиболее близок к предлагаемому и принят за прототип.
Суть известного способа заключается в следующем. Во время движения судна в отдельно взятом шпангоутном сечении его корпуса образуется гидродинамическая реакция, величину которой определяют выражением

где υx - продольная составляющая линейной скорости судна в шпангоутном сечении;
υy(xшп) - поперечная составляющая линейной скорости судна в шпангоутном сечении;
λy(xшп) - присоединенная масса шпангоутного сечения, определяемая известными способами при данном состоянии загрузки судна [2], [4];
xшп - абсцисса шпангоутного сечения;
dx -элементарное расстояние между шпангоутными сечениями.
Поперечная гидродинамическая сила и ее момент определяют интегрированием по длине гидродинамических реакций в шпангоутных сечениях корпуса судна


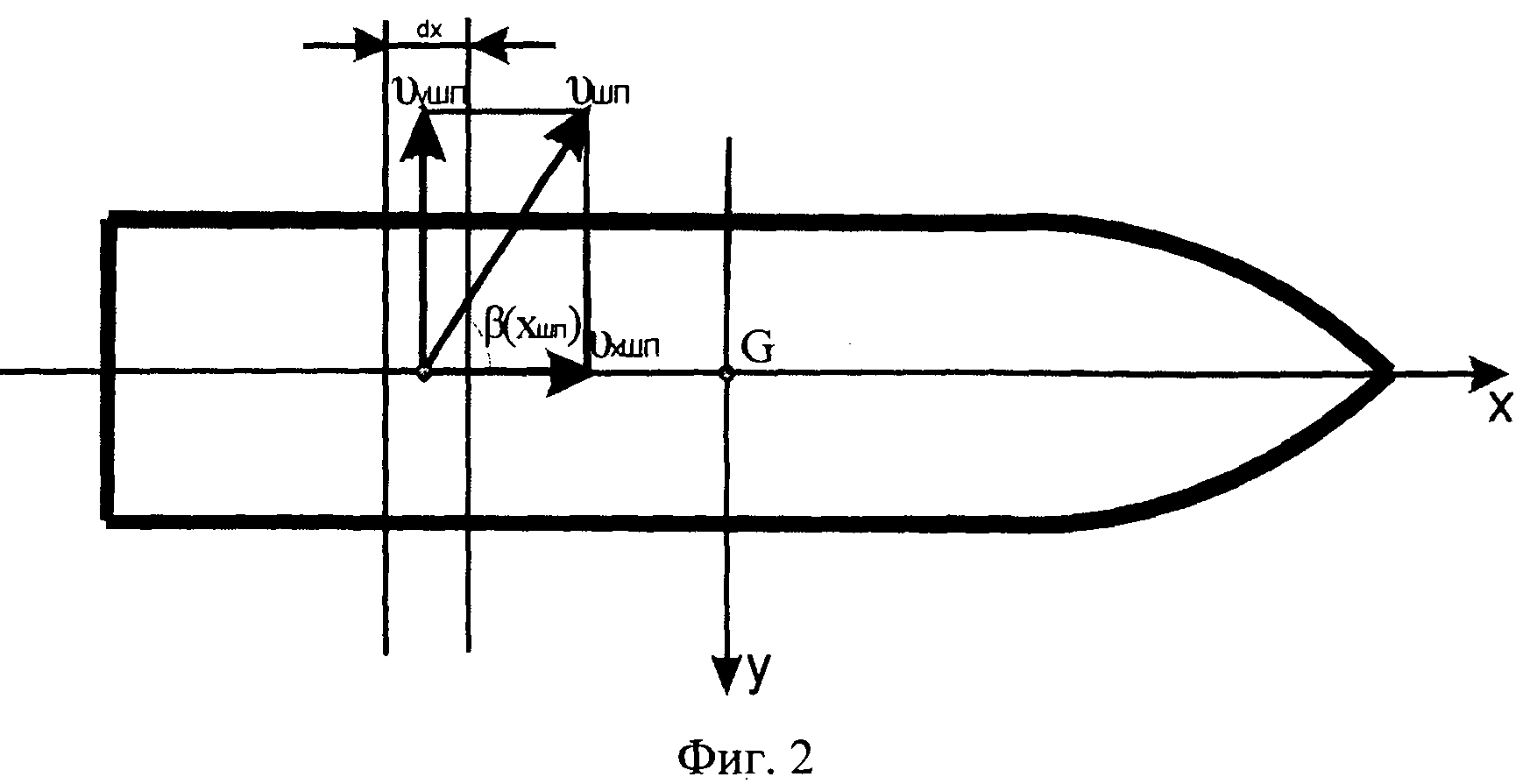
Для реализации данного известного способа в условиях сложного маневрирования судна необходимо непрерывно рассчитывать значения поперечной υy(xшп) составляющей линейной скорости во всех шпангоутных сечениях (величина продольной составляющей υx одинакова во всех шпангоутных сечениях корпуса судна, поэтому ее значение достаточно определить в любом заданном шпангоутном сечении). Рассчитывают значения составляющих линейной скорости в любом шпангоутном сечении с использованием зависимостей:


где υшп - линейная скорость в шпангоутном сечении;
β(xшп) - угол дрейфа в шпангоутном сечении.
Однако текущие значения углов дрейфа во всех шпангоутных сечениях невозможно определить экспериментально в процессе маневрирования из-за отсутствия необходимых технических средств.
Цель изобретения - совершенствование управления судном, выполняющим сложное маневрирование.
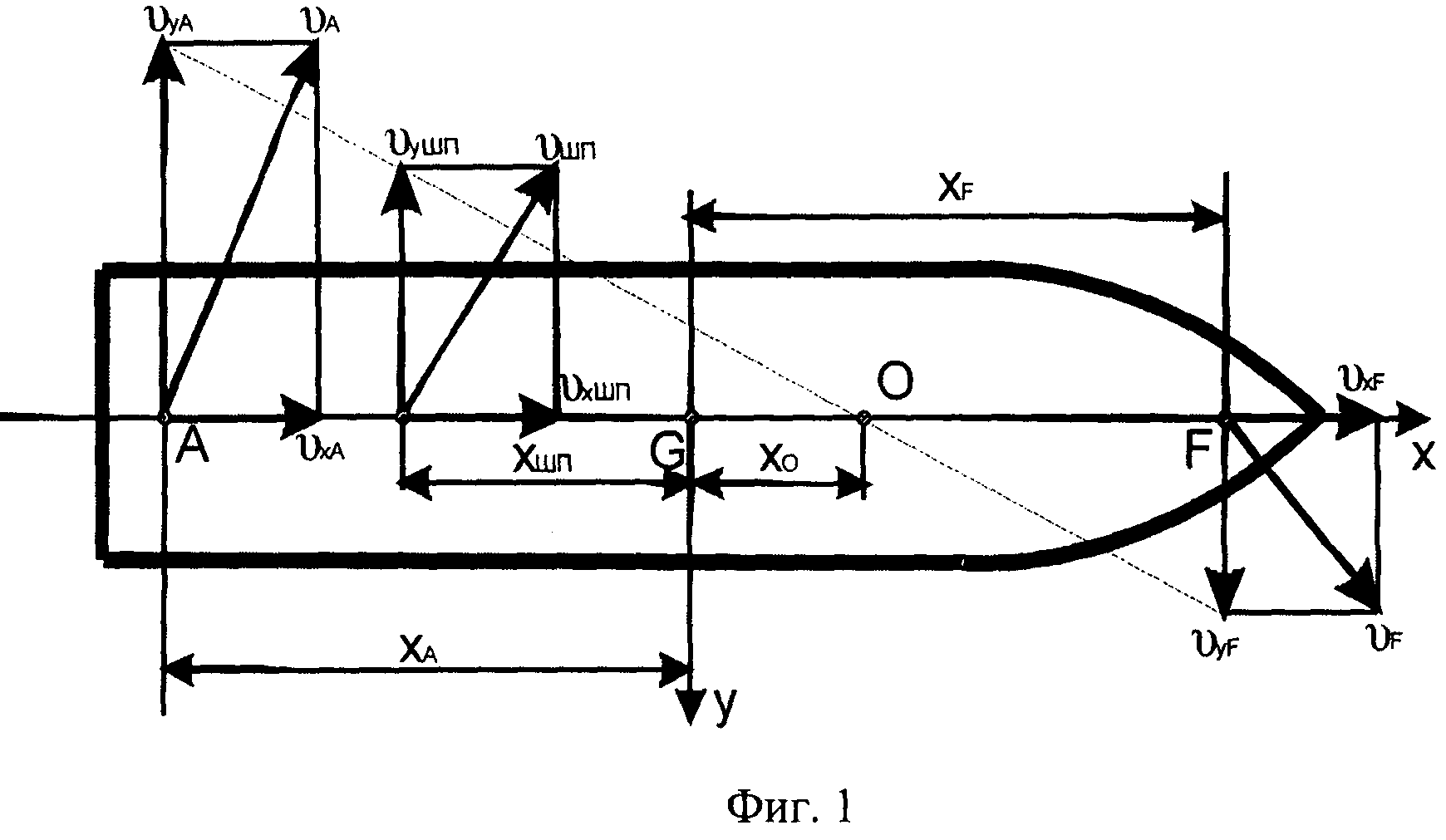
Для достижения указанной цели в способе определения гидродинамической силы и ее момента при выполнении сложного маневрирования судна, включающем определение поперечной составляющей линейной скорости судна в шпангоутном сечении, присоединенной массы шпангоутных сечений, поперечной гидродинамической силы и ее момента, дополнительно используют расположенные в диаметральной плоскости судна условно названные кормовую точку А и носовую точку F, в которых размещают акселерометры, с их помощью измеряют продольные и поперечные ускорения точек F(wxF, wyF) и A(wxA, wyA), определяют текущие значения составляющих линейных скоростей точек А(υA) и F(υF) на основании очевидных соотношений:
 ;
;
 ;
;
 ;
;
 ,
,
рассчитывают абсциссу x0 полюса поворота.
Предлагаемый способ поясняется чертежами, представленными на фиг.1, 2.
Сущность способа заключается в следующем.
Дополнительно используют расположенные в диаметральной плоскости судна условно называемые кормовую точку А и носовую точку F. На судне в его носовой F и кормовой А точках (фиг.1), имеющих соответствующие абсциссы xF и хA, размещают акселерометры для измерения продольных (wxF, wxA) и поперечных (wxF, wyA) составляющих ускорений в точках F и А.
В процессе выполнении сложного маневрирования акселерометрами измеряют продольные и поперечные линейные ускорения точек F(wxF, wyF) и A(wxA, wyA), а величины текущих значений составляющих линейных скоростей точки F(υF) и точки А(υA) (фиг.1) рассчитывают на основании
очевидных соотношений:

Далее рассчитывают абсциссу полюса поворота x0 (фиг.1):

поперечные составляющие линейных скоростей в шпангоутных сечениях

Значения присоединенных масс шпангоутных сечений λ(xшп) рассчитывают известными способами в зависимости от состояния загрузки судна, которая не меняется в процессе маневрирования.
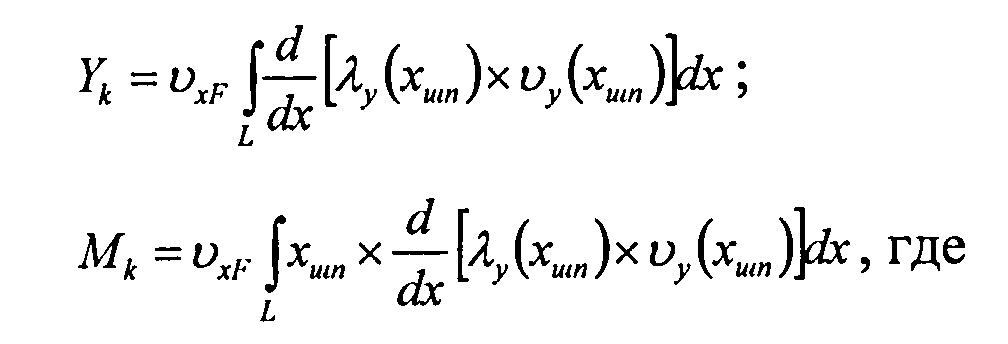
Определяют поперечную гидродинамическую силу и ее момент, образующиеся на корпусе судна при его движении в процессе сложного маневрирования:
 ;
;
 , где
, где
λy(xпш) - присоединенная масса шпангоутного сечения, dx - элементарное расстояние между шпангоутными сечениями.
Полученные таким образом значения поперечной гидродинамической силы Yk и ее момента Mk используют для прогнозирования движения судна при выполнении им сложного маневрирования.
Литература
1.Басин A.M. Ходкость и управляемость судов / А.М.Басин. - М.: Транспорт, 1967. - 255 с.
2.Соболев Г.В. Управляемость корабля и автоматизация судовождения / Г.В.Соболев. - Л.: Судостроение, 1976. - 478 с.
3. Справочник по теории корабля: В 3 т. Т.3. Управляемость водоизмещающих судов. Гидродинамика судов с динамическими принципами поддержания / под ред. Я.И.Войткунского. - Л.: Судостроение, 1985. - 544 с.: ил.
4. Юдин Ю.И. Теоретические основы безопасных способов маневрирования при выполнении точечной швартовки / Ю.И.Юдин, С.В.Пашенцев, Г.И.Мартюк, А.Ю.Юдин. - Мурманск: Изд-во МГТУ, 2009. - 152 с.


Способ управления движущимся судном
Способ управления движением буксирной системы
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера, стоящего на якоре
Способ определения поперечной гидродинамической силы, образующейся на корпусе судна при выполнении сложного маневрирования
Способ управления движением судна по заданной траектории
Технологическая жидкость для перфорации и глушения нефтяных скважин
Паштет из сайки с тыквой
Способ дистанционного измерения температуры среды

