Результат интеллектуальной деятельности: СПОСОБ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ МАНИПУЛЯТОРА
Вид РИД
Изобретение
Изобретение относится к способу моделирования движения манипулятора в производственном окружении с признаками ограничительной части пункта 1 формулы изобретения, к компьютерной программе с программным кодом с признаками ограничительной части пункта 17 формулы изобретения, и к системе моделирования движения манипулятора в производственном окружении с признаками ограничительной части пункта 18 формулы изобретения.
В робототехнике подвижная часть конструкции робота, соответственно промышленного робота, называется манипулятором. Такие манипуляторы применяются в настоящее время в автоматизированном производстве, например, при изготовлении конструктивных элементов структуры самолета. Речь идет, например, о роботе с многоосными механическими руками, которые используются в соответственных производственных участках. При этом осевое положение такого манипулятора задает исходное положение, включая ориентацию, для инструмента, соответственно рабочего органа робота, при этом это исходное положение называется также центральной точкой инструмента (Tool Point Center).
Обработка, в частности, больших деталей, в данном случае фюзеляжа, крыльев самолетов и их составляющих частей, в производственных участках с помощью таких многоосных промышленных роботов требует сложных процессов движения отдельных осей такого робота, при этом эти процессы движения можно регулярно вычислять лишь с помощью сложных алгоритмов соответствующих контрольных устройств. Определяемый таким образом процесс движения называется также планируемой траекторией, а такое контрольное устройство называется также числовым управлением (NC) или числовым программным управлением (CNC). Таким образом, оператор, например, задает желаемое конечное расположение и положение манипулятора, и контрольное устройство вычисляет на основании этого планируемую траекторию для манипулятора, вдоль которой затем перемещается манипулятор, с целью достижения указанного конечного положения.
Наряду с предотвращением сингулярностей, планируемая траектория для предотвращения столкновений манипулятора должно учитывать также контуры препятствий в производственном участке. Такие контуры препятствий образуются не только самой деталью, но также другими объектами в окружении, к которым относятся, в частности, другие составляющие части производственного участка, такие как, например, структурные элементы, электродвигатели, опоры конструктивных элементов, датчики и т.д. Поскольку обычно, с одной стороны, известны конструктивные данные как детали, так и манипулятора и в целом производственного участка и, с другой стороны, соответствующее положение рабочих точек на детали, такое планирование траектории, как правило, осуществляется заранее посредством моделирования, при этом планируемая траектория должна еще проходиться при фактической работе. Такое, отдельное и в большинстве случаев также пространственно от собственно обработки и движения в производственном участке моделирование обычно называется офлайн моделированием, а соответствующее программирование контрольного устройства называется по аналогии офлайн программированием.
Известен способ офлайн программирования, в котором дополнительно предусмотрена еще проверка на кинематические сингулярности вдоль программируемой планируемой траектории в зоне допуска в окружении этой планируемой траектории, из ЕР 2 418 555 А2.
Недостатком этого и аналогичных способов офлайн программирования является то, что при таком офлайновом и оторванном от реальной работы, т.е. разработанном на чертежной доске планировании траектории нельзя исключать возникновения не предусмотренной ситуации, в которой требуется отклоняющееся от заранее определенной планируемой траектории вмешательство оператора.
Необходимость такого вмешательства может вызываться, например тем, что датчик сближения манипулятора устанавливает уменьшение ниже минимального расстояния между манипулятором, в частности рабочим органом, и деталью или другим контуром препятствия. Прежде всего тогда, когда в таком состоянии дальнейшее движение манипулятора в соответствии с планируемой траекторией уменьшает это расстояние до контура препятствия еще больше, то обычно из-за связанной с этим опасности коллизий прерывается движение манипулятора в соответствии с планируемой траекторией. Такое отклонение измеряемого расстояния от моделированного заранее с помощью офлайн программирования расстояния не может быть исключено на практике. Отклонение может возникать из-за термических эффектов или других неравномерностей детали или частей производственного участка.
Поскольку больше нельзя следовать первоначально планируемой траектории, то оператор контрольного устройства в таком случае должен задавать с помощью ручного управления манипулятора, которое может называться также ступенчатым режимом работы, или за счет по-другому осуществляемого ввода новую цель для манипулятора, для которой затем необходимо определять соответствующую новую планируемую траекторию, которая должна приводить к движению манипулятора из имеющегося опасного относительно столкновения состояния. Само это движение не должно приводить, в свою очередь, к столкновению.
Однако выбор подходящего направления движения или подходящей цели движения манипулятора часто связан со значительными трудностями. Часто это сначала происходит так, что оператор со своего рабочего места, которое в большинстве случаев расположено вне производственного участка в строгом смысле слова, не видит или лишь недостаточно видит точное место, в котором расположен как раз манипулятор и в котором существует критическая опасность коллизий, так что ему в первый момент не ясно, какой предусмотренный процесс движения какой оси манипулятора с каким препятствием представляет опасность коллизий.
Даже когда на производственном участке расположены дополнительные камеры, совсем не гарантируется, что они действительно могут давать полезный вид соответствующего места. Дополнительно к этому, каждая установленная камера сама по себе образует дополнительный контур препятствия, за счет чего в принципе дополнительно ограничивается возможность движения манипулятора. Поэтому для оператора часто трудно распознавать, как вообще должно выглядеть движение манипулятора, которое приводит не к столкновению, а к новому положению манипулятора с достаточным расстоянием от контуров препятствий.
На практике часто находят выход тем, что оператор или другой сотрудник производственного участка входит в производственный участок, с целью обеспечения лучшего вида на проблематичное положение манипулятора. Понятно, что это недопустимо с точки зрения безопасности работы. Дополнительно к этому, при попытке вывода вручную манипулятора опасность коллизий за счет неправильной оценки геометрических особенностей является очень высокой, и это обычно приводит к повреждениям манипулятора, детали или производственного участка и тем самым к длительному выходу из строя производственного участка.
Таким образом, лежащая в основе изобретения проблема состоит в дальнейшем усовершенствовании известного из уровня техники способа моделирования движения манипулятора в производственном окружении так, что облегчается предотвращение возникновения состояний опасности коллизий, которые возникают при прохождении манипулятора по планируемой траектории.
Указанная выше задача решена относительно способа моделирования движения манипулятора в производственном окружении, согласно ограничительной части пункта 1 формулы изобретения, с помощью признаков отличительной части пункта 1 формулы изобретения.
Относительно компьютерной программы с программным кодом, согласно ограничительной части пункта 17 формулы изобретения, указанная выше задача решена с помощью признаков отличительной части пункта 17 формулы изобретения.
Указанная выше задача решена относительно системы для моделирования движения манипулятора в производственном окружении, согласно ограничительной части пункта 18 формулы изобретения, с помощью признаков отличительной части пункта 18 формулы изобретения.
Предлагаемый способ служит для моделирования движения манипулятора в производственном окружении, при этом манипулятор приводится в движение в рабочем режиме с помощью контрольного устройства, и при этом производственное окружение отражено в модели окружения.
В данном случае понятие манипулятор следует понимать широко. Оно охватывает не только манипулятор в более узком смысле, но включает также расположенный на нем любой исполнительный орган или другие компоненты, которые движутся при движении манипулятора.
В данном изобретении под „контрольным устройством“, которое в данном случае может состоять из одного или нескольких, при необходимости распределенных отдельных устройств, понимается устройство для управления и регулирования станков, включая указанные манипуляторы, в смысле числового управления или числового программного управления, при этом устройство может содержать персональный компьютер. Контрольное устройство может управлять не только манипулятором через его оси в соответствии с определяемой с помощью контрольного устройства посредством вычисления планируемой траектории, но также другими составляющими частями манипулятора, такими как исполнительный орган и, в данном случае, в частности его образом действия. В соответствии с этим, движение манипулятора с помощью контрольного устройства содержит, наряду с собственным движением манипулятора, также выполняемое лишь исполнительным органом движение или действие. Дополнительно к этому, контрольное устройство может выполнять также другие автоматизированные задачи.
Понятие производственное окружение в данном случае охватывает не только производственный участок с его компонентами, но также саму деталь и все другие объекты, которые находятся в достигаемом манипулятором пространстве. Таким образом, также составляющие части манипулятора можно относить к производственному окружению, т.е. перекрывания для релевантных здесь целей явно не исключаются.
В соответствии с этим определением понятий, под понятием модель окружения понимается, в свою очередь, информационная вычислительная модель по меньшей мере для частей производственного окружения в указанном выше смысле, при этом вычислительная модель может служить в качестве основы для образования модели в рамках планирования траектории и для проверки коллизий. Это по меньшей мере частичное отображение производственного окружения в модели окружения может состоять в том, что лишь существенные элементы и не обязательно каждая подробность производственного окружения отображается в модели окружения. Предпочтительно, что производственное окружение полностью отображается в модели окружения.
Существенным для предлагаемого способа является то, что планируемая траектория вычисляется с помощью контрольного устройства из заданного движения манипулятора, исходя из исходного положения и на основе кинематической модели манипулятора. Кроме того, выполняется кинематический контроль коллизий на основании планируемой траектории, кинематической модели и модели окружения, и создается результат прогнозирования на основании кинематического контроля коллизий.
Под заданным движением манипулятора следует понимать любое задание, в частности оператором, подлежащего выполнению манипулятором движения. Такое задание может состоять из специальной целевой точки, соответственно, специальной целевой координаты манипулятора и, в частности, из центральных точек инструмента (TCP) или из задания желаемого направления движения манипулятора, соответственно центральных точек инструмента, с одновременным определением, или без него, длины или длительности движения или желаемой конечной точки. Заданное движение может также содержать несколько участков движения с соответствующими подлежащими заниманию промежуточными положениями.
Понятие исходное положение означает в данном случае каждое механическое или электрическое свойство положения манипулятора, которое может занимать этот манипулятор, так, например, его кинематическое положение, конфигурация осей, положение каждого исполнительного элемента на манипуляторе или на исполнительном органе и т.д. Вместо исходного положения может использоваться более подробная формулировка исходное положение манипулятора.
В соответствии с этим, понятие кинематическая модель обозначает кинематическую модель манипулятора с данными, которые подходят для электронного отображения кинематики манипулятора и его исходного положения в указанном выше смысле, в частности, с целью вычисления движения манипулятора. Планируемая траектория является, в свою очередь, создаваемым, например, с помощью контрольного устройства, будущим ходом движения для всех управляемых контрольным устройством частей манипулятора, включая исполнительный орган и, в частности, с охватом всех осей манипулятора.
Под понятием кинематического контроля коллизий понимается вычисление, которое отвечает на вопрос, возможно ли и в каком размере при прохождении планируемой траектории манипулятором столкновение манипулятора или одной его составной части с частью производственного окружения, если она отображена в модели окружения. Результат такой проверки коллизий может быть двоичным, т.е. лишь подтверждать или отрицать коллизии, соответственно, определенную опасность коллизий, или же для всей планируемой траектории или для каждого отрезка или точки участка движения в соответствии с планируемой траекторией выдавать процентную или выраженную по-другому вероятность или другую степень измерения возникновения столкновения. При этом проверка коллизий может одновременно содержать проверку возникновения сингулярностей. При этом кинематическом контроле коллизий следует учитывать не только движение манипулятора в соответствии с планируемой траекторией, но также возможные, одновременно выполняемые движения производственного окружения или его частей. Так, например, может быть предусмотрено, что одновременно с движением манипулятора движется также зажимная рама для подлежащей обработке детали вместе с деталью. Зажимная рама и деталь, как указывалось выше, следует относить в этом контексте к производственному окружению. В этом случае следует рассматривать модель окружения как изменяющуюся во времени и, соответственно, не статическую.
Наконец, основанный на этом кинематическом контроле коллизий результат прогнозирования указывает, разрешено ли заданное движение манипулятора или нет. Результат прогнозирования может указывать также, что заданное движение разрешено лишь при определенных обстоятельствах, например, при одновременном определенном движении опоры детали. Другими словами, результат возможно сложного кинематического контроля коллизий создает результат прогнозирования.
Существенным в предлагаемом способе является то, что исходное положение соответствует фактическому состоянию манипулятора. Таким образом, для вычисления планируемой траектории, и тем самым также для основанного на этом кинематического контроля коллизий и для создания результата прогнозирования, применяется фактическое текущее состояние манипулятора в качестве исходного положения. Другими словами, исходное положения, которое лежит в основе вычисления планируемой траектории из заданного движения, соответствует не фиктивной или проецируемой, прошедшей или будущей ситуации или положению или такому состоянию манипулятора, а фактической ситуации и положению и фактическому состоянию манипулятора. При этом определение фактического состояния основывается как на измерении с помощью датчиков манипулятора, так и на вычислении фактического состояния манипулятора в соответствии с известным предыдущим состоянием и известным выполненным движением, или же на комбинации обоих подходов.
Таким образом, в любом случае обеспечивается, что результат прогнозирования основывается на проверке коллизий, которая опирается на текущее фактическое состояние манипулятора и на планируемую траекторию, исходя из этого фактического состояния. Таким образом, с помощью результата прогнозирования можно судить о том, может ли быть выполнена соответствующая заданному движению планируемая траектория фактическим манипулятором без опасности коллизий. Это обеспечивает возможность оперативной и тем самым одновременной с выполняемой работой проверки определенного движения относительно опасности коллизий и тем самым относительно допустимости.
Таким образом, оператор, который хотел бы вывести манипулятор из критического положения, связанного с опасностью коллизий, может просто доверять результату прогнозирования предлагаемого заданного движения, с целью определения, может ли привести оно и соответствующая планируемая траектория к столкновению или нет. Основанная на интуиции, а следовательно не 100% надежная оценка сложной кинематической ситуации не должна больше проводиться. Вместо этого можно полагаться на прогнозное вычисление в соответствии с предлагаемым способом.
Как предлагается в п. 2 формулы изобретения, особенно предпочтительно, что выдается также результат прогнозирования, так что оператор может его знать. Особенно наглядная вывод может достигаться посредством визуализации.
Особый интерес представляет вывод в реальном времени результата прогнозирования, как предлагается в предпочтительном варианте выполнения в п. 3 формулы изобретения. В этом случае оператор получает, во всяком случае ощущает, мгновенное и тем самым без потери времени квитирование изменения заданного движения или состояния манипулятора, так что он в реальном времени получает информацию, возможно или нет заданное движение без столкновения. Это квитирование в реальном времени представляет значительное улучшение эргономики. Связанная с этим предпочтительная модификация по п. 4 формулы изобретения дополнительно обеспечивает, что результат прогнозирования имеется перед выполнением движения манипулятора.
В принципе заданное движение манипулятора может быть описано любым образом, например, также с помощью данных в банке данных компьютера. Пункт 5 формулы изобретения относится к эргономически особенно интересному вводу заданного движения с помощью устройства управления, например, с помощью ручки управления или т.п.
Особенно пригодное вспомогательное средством для проверки коллизий состоит в отображении планируемой траектории манипулятора и модели окружения в виртуальном состоянии, как предлагается в п. 6 формулы изобретения, и развивается в п.п. 7 и 8 формулы изобретения. Таким образом, могут предоставляться оператору также особенно информативным образом виртуальные, проецированные в соответствии с планируемой траекторией в будущее состояния манипулятора.
В предпочтительном варианте выполнения по п. 9 в свою очередь предусмотрена также повторная подготовка фактического исходного положения с помощью контрольного устройства, так что кинематический контроль коллизий каждый раз основывается на фактическом состоянии манипулятора с пренебрежительно малой задержкой во времени.
Согласно предпочтительному варианту выполнения по п. 10 формулы изобретения, предусмотрена возможность выполнения в отдельном от контрольного устройства вычислительном устройстве компьютерной программы, которая полностью и идентично отображает планируемую контрольным устройством траекторию. Таким образом, можно выполнять также кинематический контроль коллизий независимо, но одновременно с планированием траектории контрольным устройством. Как раз этот, противоречащий обычному образу мышления подход, который предусматривает параллельный и тем самым кажущийся избыточным процесс двух идентичных планирований траектории, облегчает реализацию прогнозирования столкновения в реальном времени.
Для возможно более надежного предотвращения столкновений, в предпочтительном варианте выполнения по п. 11 формулы изобретения предлагается предотвращение управления манипулятором, когда это управление в соответствии с результатом прогнозирования приведет к столкновению или к неприемлемо высокой опасности коллизий. Таким образом, можно предотвращать также непреднамеренные ошибки управления.
Наконец, предпочтительный вариант выполнения по п. 12 формулы изобретения обеспечивает возможность осуществления особенно точной кинематической модели или модели окружения тем, что они опираются на данные моделей в электронном виде, как они предоставляются в распоряжение, например, конструкционными программами.
Предпочтительные варианты выполнения по п.п. 13-15 формулы изобретения относятся к возможности выполнения при планировании траектории регулирования кинематической модели, с целью компенсации влияний окружения, таких как, например, температурные эффекты, которые могут быть причиной отклонения заданного положения от фактического положения манипулятора. Такая компенсация в этом случае предпочтительно учитывается также при кинематическом контроле коллизий и при создании результата прогнозирования.
Ниже приводится более подробное пояснение изобретения на основе примеров выполнения со ссылками на прилагаемые чертежи, на которых изображено:
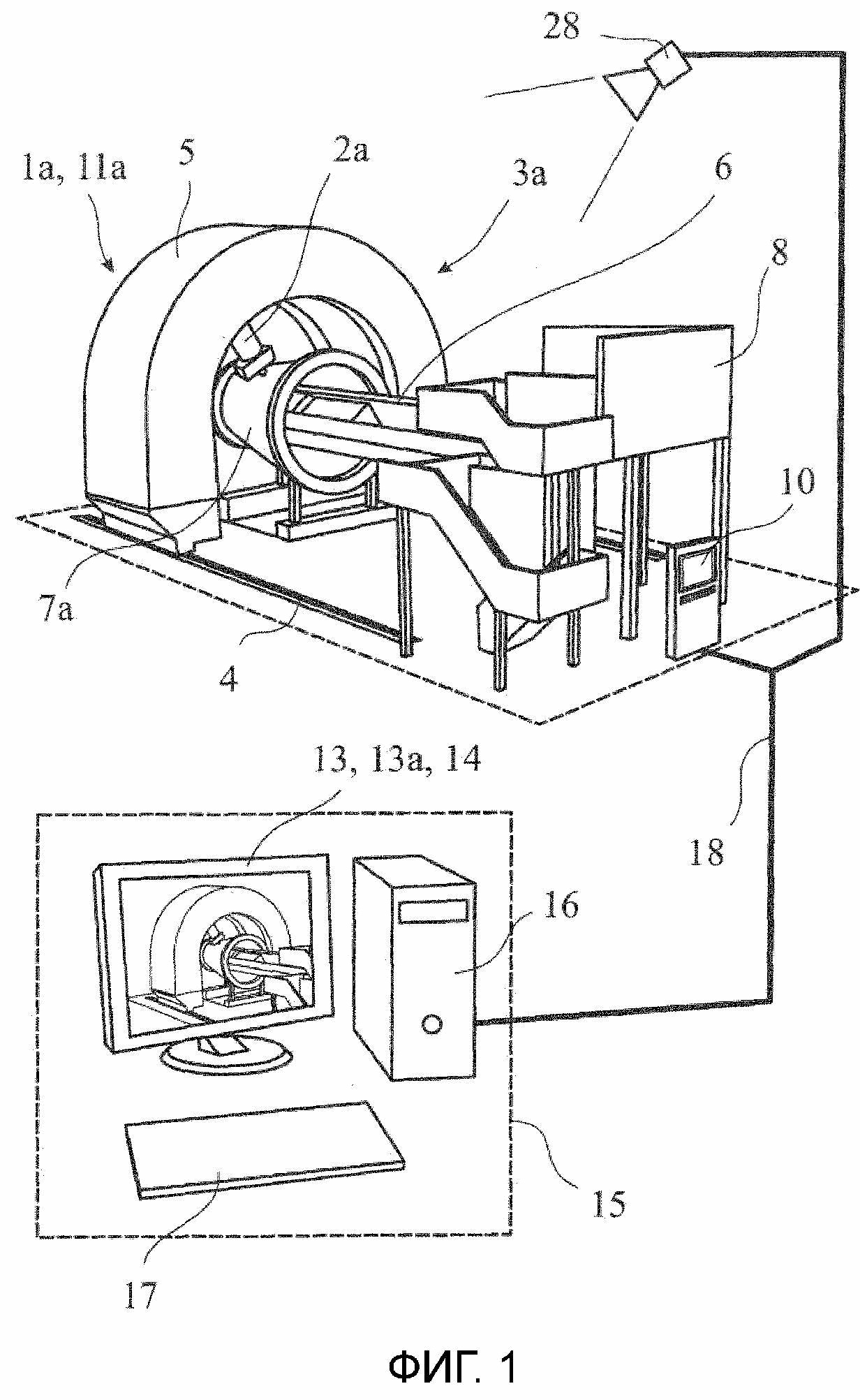
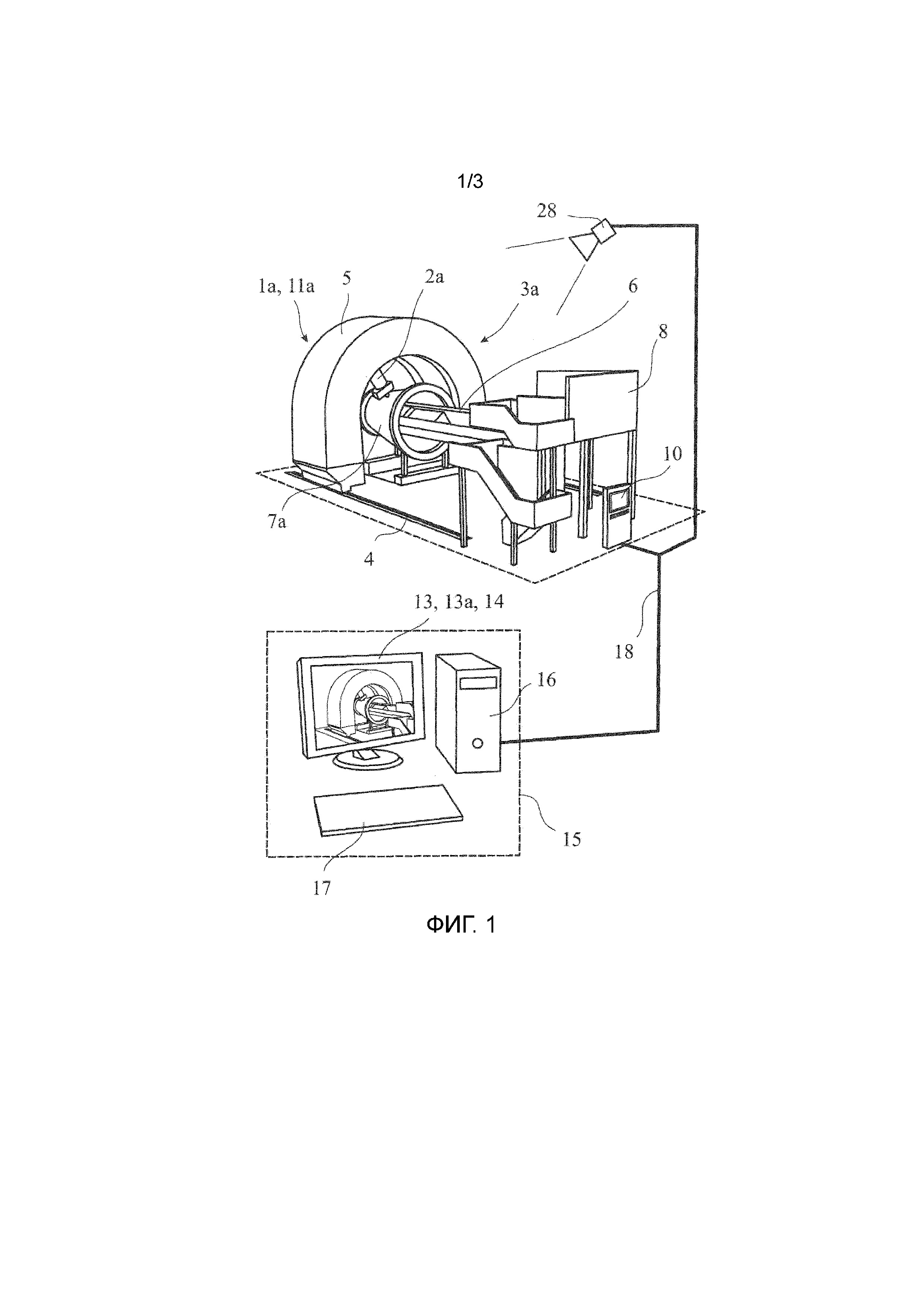
фиг. 1 - общий вид системы производственного участка с соответствующими компонентами, согласно первому примеру выполнения, при этом система предназначена для реализации предлагаемого способа;
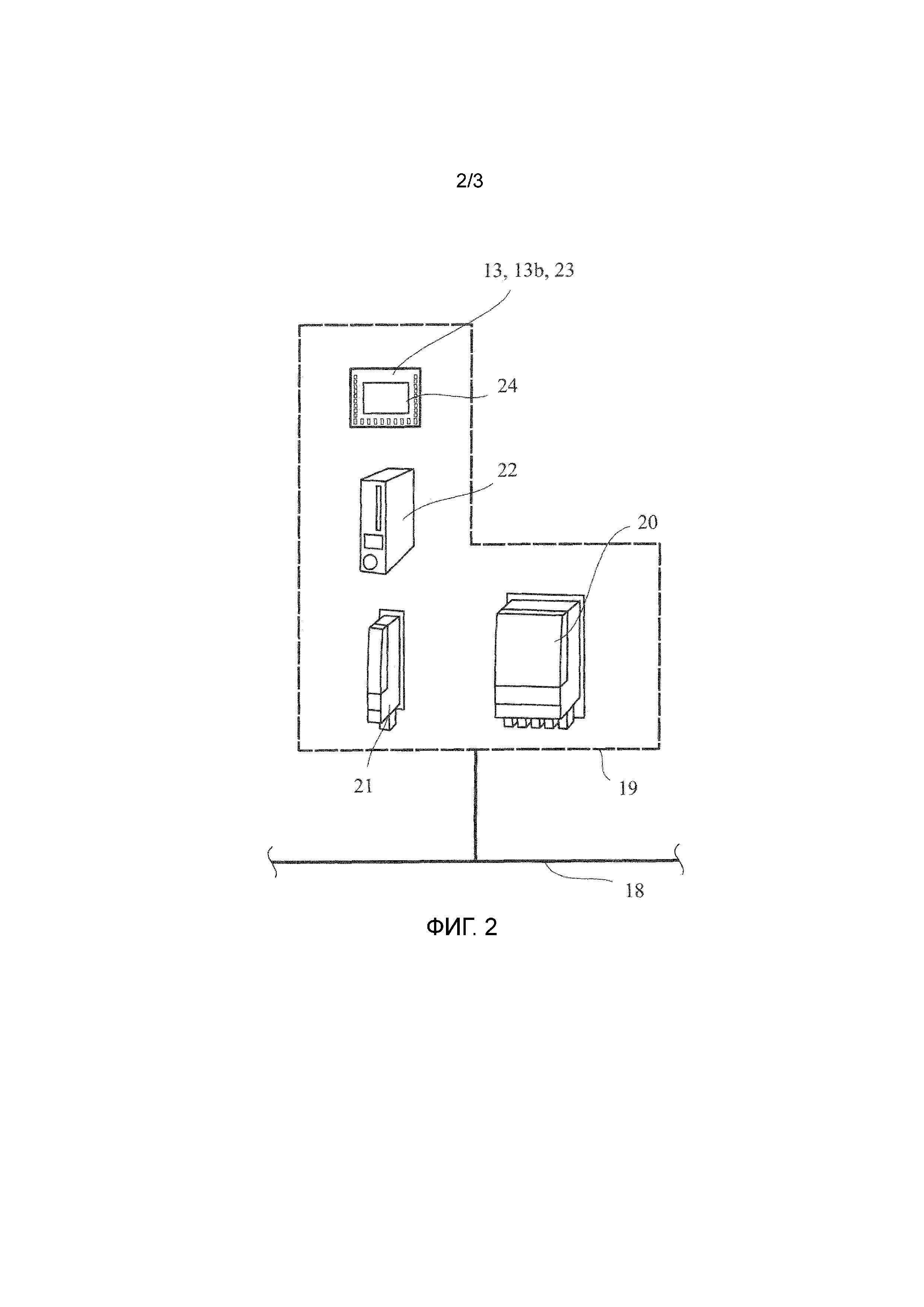
фиг. 2 - составляющие части контрольного устройства из системы, согласно фиг. 2;
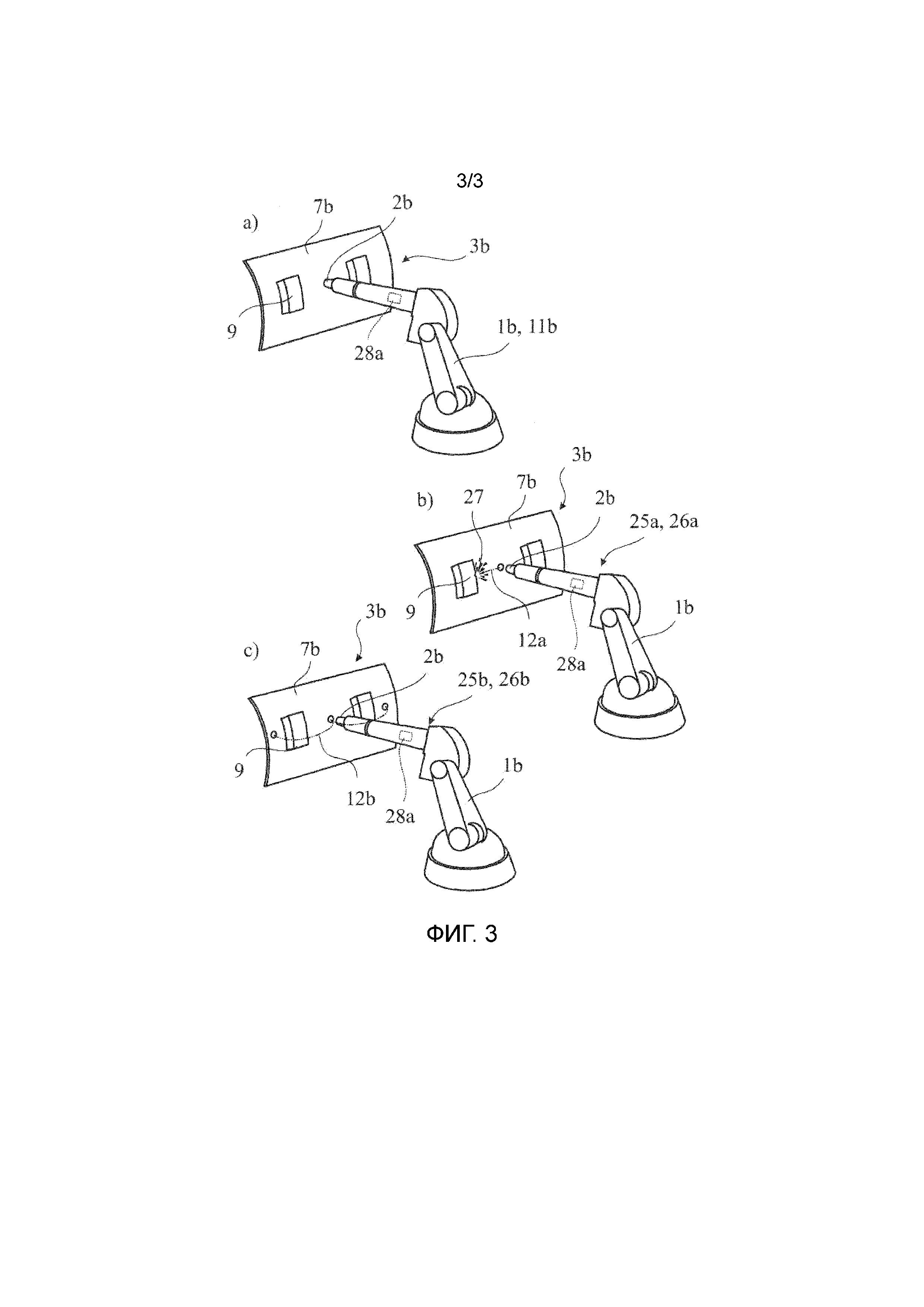
фиг. 3а-е - манипулятор, согласно второму примеру выполнения, а также изображения этого манипулятора с помощью устройства визуализации во взаимосвязи с предлагаемым способом.
Данные примеры выполнения относятся к манипулятору 1а,b в производственном участке, в котором в структурных конструктивных элементах самолета выполняются заклепочные соединения с помощью заклепочной машины. Манипулятор 1а,b имеет числовое управление. Производственный участок в первом, показанном на фиг. 1 примере выполнения, является участком сборки секций (Integrated Section Assembly Cell) для обработки 360 градусных секций фюзеляжа самолетов. Заклепочная машина образует исполнительный орган 2а манипулятора 1а, который является в данном случае 12-осным позиционером. Производственные участки в обоих примерах выполнения со всеми их соответствующими составляющими частями образуют соответствующее производственное окружение 3а,b в соответствии с приведенными выше определениями понятий.
Исполнительный орган 2а установлен на внутренней поверхности сдвигаемой вдоль расположенных на полу рельсов 4 производственной дуги 5 с возможностью движения, при этом, следовательно, рельсы 4 и производственная дуга 5 образуют соответствующую часть как производственного окружения 3а, так и манипулятора 1а. На подвижной опоре 6 закреплена деталь 7а, которая в данном случае является конструктивным элементом структуры самолета. Кроме того, в производственном участке предусмотрен помост 8 для персонала. В соответствии с приведенными выше определениями понятий, опора 6, деталь 7 и помост 8 также принадлежат к производственному окружению 3а. Кроме того, к производственному участку относится контрольное устройство 10.
На фиг. 3а-е, на которые также делаются в последующем ссылки, показан второй пример выполнения с шестиосным манипулятором 1b с исполнительным органом 2b, производственное окружение 3b которого содержит деталь 7b с двумя выступами 9. При этом исходное состояние, согласно второму примеру выполнения, показано на фиг. 3а.
Предлагаемый способ служит, как указывалось выше, для моделирования движения манипулятора 1а,b в производственном окружении 3а,b. В предлагаемом способе манипулятор 1а,b движется в рабочем режиме с помощью контрольного устройства 10 (для примера выполнения на фиг. 3а-с не изображено), при этом производственное окружение 3а,b по меньшей мере частично отображено в модели окружения. Под рабочим режимом понимается здесь и в последующем режим работы для заданной обработки деталей с помощью манипулятора. Измерительный и пробный режим сюда не входят.
Предлагаемый способ содержит вычисление планируемой траектории 12а,b с помощью контрольного устройства 10 из заданного движения манипулятора 1а,b, исходя из исходного положения 11а,b манипулятора 1а,b и на основе кинематической модели манипулятора 1а,b. Для наглядности такие планируемые траектории 12а,b изображены лишь для второго примера выполнения. На фиг. 3b и 3с показана соответствующая планируемая траектория 12а,b, которые обе исходят из исходного положения 1b, согласно фиг. 3а.
Кроме того, предлагаемый способ содержит выполнение кинематического контроля коллизий на основе планируемой траектории 12а,b, кинематической модели и модели окружения и создание результата прогнозирования на основе кинематического контроля коллизий.
Предлагаемый способ отличается тем, что исходное положение 11а,b соответствует фактическому состоянию манипулятора. Таким образом, созданный результат прогнозирования указывает, представляет ли и в какой мере фактическое выполнение движения манипулятора 1а,b вдоль определенной с помощью контрольного устройства 10 планируемой траектории 12а,b опасность коллизий.
Предпочтительно, что способ содержит вывод результата прогнозирования с помощью устройства вывода 13, которое предпочтительно и как в данном случае является устройством 13а,b визуализации. В показанном на фиг. 1 примере выполнения такое устройство 13а визуализации образовано экраном 14 компьютерной системы 15 с вычислительным устройством 16 и устройством 17 управления в виде клавиатуры. Компьютерная система 15 в целом и, в частности, вычислительное устройство 16 соединены с контрольным устройством 10 через сеть 18 связи.
В данном случае и как показано точнее на фиг. 2, контрольное устройство 10 является модульной системой SINUMERIK® 840D sl 19, которую образует SINAMIKS® S120 в качестве приводной системы 20, а также NCU 720.3ON в качестве числового контрольного блока 21 и PCU 50.5-Р в качестве вычислительного блока 22. SINUMERIK® Operator Panel OP 019 23 может также образовывать устройство 13b визуализации для вывода результата прогнозирования. Кроме того, SINUMERIK® Operator Panel OP 019 23 может иметь поверхность 24 управления в виде сенсорного поля.
Для сокращения времени итерации и для возможно более удобного управления, оператору должно выдаваться по существу мгновенно воспринимаемое обратное сообщение об его вводе, т.е. о требуемом заданном движении. Это достигается предпочтительно тем, что выполнение кинематического контроля коллизий и создание результата прогнозирования должно происходить внутри заданного времени вычисления после изменения и/или ввода заданного движения. В частности, должна обеспечиваться вывод в реальном времени результата прогнозирования с помощью устройства вывода 13, в данном случае с помощью устройства 13а,b визуализации. Понятие вывода в реальном времени в первом, общем смысле следует понимать, как было указано выше, т.е. что задано максимальное время вычисления, внутри которого должен быть подготовлен результат прогнозирования с помощью устройства вывода 13, соответственно, устройства 13а,b визуализации. В этом случае оператор воспринимает вывод в качестве реакции на ввод субъективно как происходящую в реальном времени, когда вывод происходит внутри 50 мс после ввода. Эта ощущаемая в реальном времени реакция особенно явная, когда вывод происходит даже внутри 10 мс после ввода. Следовательно, особенно предпочтительно, что вывод результата прогнозирования происходит с помощью устройства вывода 13, соответственно, с помощью устройства 13а,b визуализации внутри 50 мс и, в частности, внутри 10 мс после изменения и/или ввода заданного движения.
Результат прогнозирования может применяться уже в самом контрольном устройстве 10 в качестве разрешающего сигнала для управления движением манипулятора 1а,b. В соответствии с этим, такое управление происходит лишь тогда, когда результат прогнозирования для управления в соответствии с планируемой траекторией не предвещает столкновения. Другими словами, результат прогнозирования предпочтительно создается перед движением манипулятора 1а,b в соответствии с планируемой траекторией 12а,b с помощью контрольного устройства 10.
Особенно целесообразна такая вывод в реальном времени, когда также соответствующий ввод заданного движения происходит не посредством считывания данных или аналогичного процесса, а посредством вмешательства вручную оператора. Таким образом, предпочтительно, что способ содержит прием ввода, и в данном случае, в частности, ввода вручную, заданного движения с помощью устройства 17 управления. В данном примере устройство 17 управления является указанной клавиатурой компьютерной системы 15, а также, возможно, управляющей поверхностью 24 панели SINUMERIK® Operator Panel OP 019 23, или не изображенной здесь ручкой управления компьютерной системы 15 или контрольного устройства 10.
Очень наглядной является вывод, которая представляет графически будущее состояние манипулятора 1a,b в производственном окружении 3a,b. Поэтому предпочтительно, что предлагаемый способ содержит вывод виртуального состояния 25a,b на основе планируемой траектории 12a,b и модели окружения. Под виртуальным состоянием 25 понимается электронное отображение, с одной стороны, манипулятора 1a,b на основе кинематической модели после выполнения планируемой траектории 1a,b, исходя из исходного положения 11a,b и, с другой стороны, производственного окружения 3a,b на основе модели окружения, также после выполнения движения манипулятора 1a,b. Другими словами, виртуальное состояние 25 обозначает охватывающую вычислительную модель манипулятора 1a,b и производственного окружения 3a,b после движения манипулятора 1a,b вдоль планируемой траектории 12а,b. При этом виртуальное состояние 25а,b может учитывать также возможно осуществляемое внутри релевантного времени движение производственного окружения 3a,b в целом или его отдельных частей. Такое движение может состоять в показанном на фиг. 1 примере выполнения, например, из расширения опоры 6 с деталью 7а.
Этот предпочтительный вариант выполнения может быть модифицирован за счет того, что вывод виртуального состояния 25a,b содержит вывод проекции 26а,b трехмерной модели манипулятора 1a,b и производственного окружения 3a,b. Эта трехмерная модель является изображением подходящей презентации виртуального состояния 25a,b и тем самым также состояния манипулятора 1a,b и производственного окружения 3a,b после выполненного движения в соответствии с планируемой траекторией 12a,b. Проекция 26a,b является в свою очередь двумерным изображением, которое получается из этой трехмерной модели и угла обзора воображаемого наблюдателя, и которое тем самым пригодно для отображения на обычном устройстве 13a,b визуализации.
На фиг. 3b и 3с показана в качестве примера такая проекция 26a,b, которая может быть отображена также на экране 14 компьютерной системы 15 на фиг. 1, при этом для простоты изображения на фиг. 3b и 3с географически не делается различия между проекцией 26a,b и лежащим в основе проекции виртуальным состоянием 25a,b.
Предпочтительно, предусмотрена возможность установки лежащего в основе изображения угла обзора, так что проекция 26a,b трехмерной модели манипулятора 1a,b и производственного окружения 3a,b основывается на устанавливаемом угле обзора. Таким образом, оператор может выбирать направление для проекции 26a,b, которое особенно пригодна для имеющейся ситуации столкновения.
Вывод виртуального состояния 25a,b может также осуществляться так, что географически особенно просто распознаваемым образом определяется, указывает ли результат прогнозирования ситуацию столкновения, соответственно, опасность коллизий, или же указывает на отсутствие такой ситуации столкновения или такой опасности коллизий. Так, например, на фиг. 3b показана проекция 26a виртуального состояния 25а, в котором, согласно результату прогнозирования, планируемая траектория 12а привела к проецируемому столкновению манипулятора 1b с выступом 9 детали 7b, что явно следует для оператора из проекции 26а с помощью пиктограммы 27 столкновения. Таким образом, оператор наглядно предупреждается, что эта планируемая траектория 12а не должна выполняться. Альтернативно или дополнительно к пиктограмме 27 столкновения проекция 26а с целью предупреждения может окрашиваться в предупреждающий цвет, например, в красный.
И наоборот, из проекции 26b на фиг. 3с также явно следует, что движение в соответствии с планируемой траекторией 12b может быть выполнено без опасности коллизий. В данном случае это происходит за счет изображения планируемой траектории 12b без пиктограммы столкновения, при этом также в этом случае может быть предусмотрено дополнительно изображение проекции 26b в разрешающем цвете, например, в зеленом.
Вывод в реальном времени в уже определенном выше смысле является предпочтительной для оператора также при выводе виртуального состояния 25a,b. Следовательно, предпочтительно, что вывод виртуального состояния 25a,b с помощью устройства 13a,b визуализации происходит внутри определенного времени визуализации после изменения и/или ввода заданного движения, так что обеспечивается вывод в реальном времени виртуального состояния 25a,b с помощью устройства 13a,b визуализации. Вывод в реальном времени, как указывалось выше, воспринимается особенно как в реальном времени, когда заданное время визуализации составляет 50 мс или даже 10 мс. В случае предпочтительной вывода проекции 26a,b трехмерной модели манипулятора 1a,b, это относится также, соответственно, к выводе проекции 26a,b.
Впечатление выполняемого возможно более в реальном времени прогнозирования движения манипулятора 1a,b достигается не только за счет указанной выше вывода в реальном времени в качестве реакции на ввод или изменение заданного движения, но также за счет того, что непрерывно учитывается и отображается изменяющееся во время движения манипулятора 1a,b положение манипулятора 1a,b. В соответствии с этим, предпочтительно, что исходное положение 11a,b повторно и предпочтительно внутри заданного интервала актуализации обновляется в соответствии с фактическим состоянием манипулятора. Это приводит к тому, что в основу как кинематического контроля коллизий, так и создания результата прогнозирования закладывается близкое во времени фактическое положение манипулятора 1a,b. Предпочтительно, обновляемое внутри заданного интервала актуализации исходное положение 11a,b закладывается в основу также виртуального состояния 25a,b, а также проекции 26a,b, так что они могут выдаваться оператору также всегда обновленными близко во времени. Кроме того, целесообразно обновлять также, соответственно, модель окружения внутри заданного интервала актуализации.
Возможность внешнего моделирования планируемой траектории 12a,b с помощью контрольного устройства 10 можно полезно использовать за счет того, что согласно одному предпочтительному варианту выполнения, вычисление другой планируемой траектории осуществляется с помощью вычислительного устройства 16 из заданного движения манипулятора 1a,b, исходя из исходного положения 11a,b и на основе кинематической модели манипулятора 1a,b, при этом вычислительное устройство 16 с помощью сети 18 связи находится в соединении с контрольным устройством 10, и при этом выполнение кинематического контроля коллизий и создание результата прогнозирования осуществляется в вычислительном устройстве 16.
Таким образом, в соответствии с этим, заданное движение либо вводится непосредственно в вычислительное устройство 16, например, с помощью устройства 17 управления, либо вводится в контрольное устройство 10 и через сеть 18 связи передается в вычислительное устройство 16, которое заданное движение манипулятора 1a,b отображает в другой планируемой траектории и тем самым моделирует планируемую траекторию 12a,b контрольного устройства 10 в смысле репликации или копирования. Это возможно, в частности, потому, что соответствующие функции контрольного устройства 10, включая обработку модели окружения и кинематической модели, полностью могут быть скопированы в виде программного кода в вычислительном устройстве 16. В соответствии с этим, кинематический контроль коллизий и создание результата прогнозирования могут выполняться либо дополнительно к соответствующему процессу контрольного устройства 10 в вычислительном устройстве 16, либо выполняться исключительно в вычислительном устройстве 16.
Для предотвращения двойных массивов данных, кинематическая модель и модель окружения могут также передаваться из контрольного устройства 10 в вычислительное устройство 16 через сеть 18 связи.
Особые преимущества обеспечиваются, когда вычислительное устройство 16 воспроизводит вычисление планируемой траектории 12a,b так, что другая планируемая траектория вычислительного устройства 16 соответствует планируемой траектории 12a,b контрольного устройства 10. Таким образом, функция вычисления реплицируется так, что для кинематического контроля коллизий и для создания результата прогнозирования нет необходимости в использовании планируемой траектории 12a,b контрольного устройства 10, а можно применять одинаково другую планируемую траекторию вычислительного устройства 16. Кроме того, эти процессы можно выполнять в вычислительном устройстве 16 независимо и возможно также быстрее, чем в контрольном устройстве 10, что облегчает вывод в реальном времени, согласно уже поясненным предпочтительным вариантам выполнения.
Особенно подходящий интерфейс между контрольным устройством 10 и вычислительным устройством 16 может быть обеспечен тем, что в качестве сети 18 связи выбирается соединение Ethernet, в котором применяется протокол TCP/IP (Transmission Control Protocol/Internet Protocol) в качестве пакета протоколов, соответственно, части пакета протоколов. На основании этого можно применять для обмена данными между вычислительным устройством 16 и контрольным устройством 10 соответствующие библиотеки программ, такие как СОМ (Component Object Model), DCOM (Distibuted Component Object Model), RPC (Remote Procedure Call), OCX (Object Linking and Embedding Control eXtension) или их модификации.
Фактическое предотвращение действий оператора, которые могут иначе приводить к столкновениям, предпочтительно достигается тем, что контрольное устройство 10 предотвращает управление манипулятором 1а,b в соответствии с планируемой траекторией 12а,b, когда результат прогнозирования указывает на опасность коллизий, соответственно, на результат коллизий. Это предотвращение управления манипулятором 1а,b контрольным устройством 10 может осуществляться, в частности, по команде вычислительного устройства 16. Такое предотвращение может быть предусмотрено в показанном на фиг. 3b случае такого результата прогнозирования. Таким образом, соответствующее действие оператора для инициирования такого управления будет активно блокироваться контрольным устройством 10. В противоположность этому, в показанном на фиг. 3с случае такое блокирование не будет выполняться.
Создание кинематической модели и модели окружения упрощается, когда, как предпочтительно, кинематическая модель и/или модель окружения базируется на данных моделей в электронном виде. При этом речь может идти также о данных моделей. Они могут происходить из соответствующих компьютерных программ, таких как, например, CATIA®, соответственно, из создаваемых этими программами массивов данных.
Предпочтительно, кинематическая модель регулируется, с целью компенсации обусловленного окружением отклонения заданного движения от фактического движения манипулятора 1а,b. Так, например, изменения температуры манипулятора могут приводить к расширению определенных частей манипулятора. В этом случае управление манипулятором 1а,b в соответствии с планируемой траекторией 12а,b приводит к фактическому движению, которое отклоняется от движения в соответствии с планируемой траекторией 12а,b. Однако когда известна взаимосвязь между температурой и такими отклонениями, то такое отклонение учитывается и тем самым компенсируется. Наряду с температурой, отклонение в указанном выше смысле могут также вызывать воздействующие на манипулятор силы, такие как, например, технологические силы.
Предпочтительно, это регулирование осуществляется перед проведением кинематического контроля коллизий. Поэтому оно затем учитывается как при проведении кинематического контроля коллизий, так и при создании результата прогнозирования. Регулирование может осуществляться также уже перед вычислением планируемой траектории 12а,b, а затем предпочтительно учитываться при вычислении планируемой траектории 12а,b.
Кроме того, предпочтительно, что компенсация основывается на измеряемом с помощью датчика 28а компенсации фактическом значении, которое обрабатывается с помощью находящихся в памяти параметров компенсации. Этот датчик 28а компенсации может быть, как показано на фиг. 3а-с, датчиком температуры. Обработка с помощью параметров компенсации может содержать, в частности, умножение на коэффициенты компенсации. Результат обработки можно затем применять в кинематической модели. Возможно также, что компенсация регулирует данные модели, на которых предпочтительно базируется кинематическая модель. Параметры компенсации могут основываться на процессе измерения, который выполняется в режиме измерения перед рабочим режимом.
Согласно примеру выполнения на фиг. 3а-с предпочтительно предусмотрено, что отклонение основывается на фактической температуре манипулятора 1а,b, предпочтительно измеренной датчиком 28а компенсации, и измеряемое фактическое значение является фактической температурой. Таким образом, речь идет о температурной компенсации. В соответствии с этим предпочтительно, что параметры компенсации содержат температурные коэффициенты, с помощью которых обрабатывается измеренная фактическая температура.
Кроме того, предпочтительно, что компенсация осуществляется с помощью контрольного устройства 10 и/или с помощью вычислительного устройства 16. Таким образом, вычислительное устройство 18 может также получать, непосредственно или опосредованно, фактическое значение для обработки. При этом, предпочтительно выполняемая вычислительным устройством 16 компенсация может воспроизводить выполненную контрольным устройством 10 компенсацию.
Исходное положение 11а,b манипулятора 1а,b может определяться либо с помощью известного предшествующего положения манипулятора 1а,b и известного последующего движения, либо, что предпочтительно, измеряться с помощью сенсорного устройства 28. Может также измеряться с помощью сенсорного устройства 28 производственное окружение 3а,b для отображения в модели окружения. Такое сенсорное устройство 28 может содержать несколько отдельных датчиков, которые работают с соответствующими различными физическими принципами действия и, возможно, связаны друг с другом, а также с контрольным устройством 10 и с вычислительным устройство 16 с возможностью передачи данных, например, через сеть 18 связи.
Предлагаемая компьютерная программа имеет программный код для выполнения следующих этапов для моделирования движения манипулятора 1а,b, когда компьютерная программа выполняется в компьютере: вычисление планируемой траектории 12а,b из заданного движения манипулятора 1а,b в производственном окружении 3а,b, которое по меньшей мере частично отображено в модели окружения, исходя их исходного положения 11а,b и на основе кинематической модели манипулятора 1а,b, выполнение кинематического контроля коллизий на основе планируемой траектории 12а,b, кинематической модели и модели окружения, и создание результата прогнозирования на основе кинематического контроля коллизий. Предлагаемая компьютерная программа характеризуется тем, что исходное положение 11а,b соответствует фактическому состоянию манипулятора.
Предлагается также соответствующий продукт компьютерной программы, который можно непосредственно заносить во внутреннюю память цифрового компьютера и который содержит участки кода программного обеспечения, с помощью которых выполняются следующие этапы, когда продукт используется в компьютере: вычисление планируемой траектории 12а,b из заданного движения манипулятора 1а,b в производственном окружении 3а,b, которое по меньшей мере частично отображено в модели окружения, исходя из исходного положения 11а,b и на основе кинематической модели манипулятора 1а,b, выполнение кинематического контроля коллизий на основе планируемой траектории 12а,b, кинематической модели и модели окружения, и создание результата прогнозирования на основе кинематического контроля коллизий. Этот продукт компьютерной программы характеризуется тем, что исходное положение 11а,b соответствует фактическому состоянию манипулятора.
Предлагаемая система для моделирования движения манипулятора 1а,b в производственном окружении 3а,b, которое отображено в модели окружения, имеет контрольное устройство 10, которое предназначено для перемещения манипулятора 1а,b в рабочем режиме, и которое предназначено для вычисления планируемой траектории 12а,b из заданного движения манипулятора 1а,b, исходя из исходного положения 11а,b и на основе кинематической модели манипулятора 1а,b, и имеет вычислительное устройство 16, которое предназначено для выполнения кинематического контроля коллизий на основе планируемой траектории 12а,b, кинематической модели и модели окружения, и для создания результата прогнозирования на основе кинематического контроля коллизий. Предлагаемая система характеризуется тем, что исходное положение 11а,b соответствует фактическому состоянию манипулятора.
Предпочтительные варианты выполнения предлагаемой компьютерной программы и предлагаемой системы для моделирования движения следуют из соответствующих предпочтительных вариантов выполнения предлагаемого способа.
Машина для укладки волокон и способ изготовления волокнистых нетканых матов
Способ работы устройства автоматизации
Устройство для изготовления заготовок
Установка для обработки структурных элементов самолета
Устройство фиксации для тестового листа
Рабочий орган для клепального устройства
Способ навертывания замыкающего кольца на резьбовой стержень
Способ компенсации отклонения рабочей точки
Манипулятор с рукой
Система изготовления

