Результат интеллектуальной деятельности: Двухканальный датчик угловой скорости
Вид РИД
Изобретение
Изобретение относится к гироскопическому приборостроению и может применяться в качестве двухканальных измерителей угловой скорости, например, при построении бескарданных систем ориентации и навигации, а также в системах индикаторной стабилизации.
Известен гироскоп (А.С. №431808, Бюл. №23 от 20.08.2005), содержащий корпус, гиромотор, карданов подвес, датчики угла и датчики момента, повернутые относительно друг друга на 90° вокруг продольной оси гироскопа, на базе которого можно за счет обратных связей построить двухканальный датчик угловой скорости.
Основным недостатком данного гироскопа является наличие карданова подвеса, что обуславливает значительный дрейф гироскопа из-за необходимости применения токоподводов для подачи электропитания на обмотки гиромотора, датчиков угла и датчиков момента и шарикоподшипников - для обеспечения вращения рамок карданова подвеса, что приведет к увеличению порога чувствительности и, соответственно, к снижению точности измерения угловых скоростей.
Известен также гироскоп (Патент США №3517562, НКИ 74/5.6, МПК G01C 19/28, выдан 30.06.1970 г.), содержащий корпус с герметично закрывающейся крышкой, гиромотор, ротор на сферической шарикоподшипниковой опоре, датчики угла взаимоиндуктивного типа и электромагнитные датчики момента. Статор гиродвигателя состоит из двух шихтованных пакетов, разделенных между собой немагнитным элементом, и обмотки, витки которой охватывают оба пакета. Обмотка гиродвигателя кроме основной своей функции выполняет функцию первичной обмотки взаимоиндуктивного датчика угла. Вторичные обмотки датчиков угла намотаны раздельно на каждом пакете, причем каждая пара обмоток геометрически сдвинута относительно друг друга на 90 градусов, что позволяет производить измерения по двум осям. Датчики момента конструктивно выполнены аналогично с датчиками угла и геометрически сдвинуты относительно них на 180 градусов.
Недостатком данного гироскопа является нелинейная (квадратичная) характеристика датчика момента, не позволяющая его применение в качестве чувствительного элемента гиростабилизатора или двухканального измерителя угловой скорости без использования дополнительных вычислительных устройств, линеаризующих статическую характеристику датчика момента.
В качестве прототипа взят гироскоп, ротор которого подвешен на сферической шарикоподшипниковой опоре (патент РФ №2460040. Бюл. №24 от 27.08.2012), который наиболее подходит к построению двухканального датчика угловой скорости с линейной выходной характеристикой по измеряемой угловой скорости.
Гироскоп, представленный в прототипе, содержит основание (корпус) с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла по два на каждую ось измерения и электромагнитные датчики силы (момента), также по два на каждую ось управления. Оси расположения датчиков углов и датчиков силы повернуты относительно друг друга на 45 градусов. В торцевой части ротора, в качестве подвижного элемента датчиков угла и датчиков силы, жестко закреплено ферритовое кольцо прямоугольного сечения, а датчики угла и датчики силы размещены на корпусе гироскопа напротив ферритового кольца.
Как указано в прототипе, что мерой измеряемой угловой скорости является ток в катушках датчика момента (в датчиках силы), который с измеряемой угловой скоростью связан квадратичной зависимостью
ω = kI2,
где ω - измеряемая угловая скорость;  - масштабный коэффициент датчика момента; I - ток в катушке датчика момента (построен по каждому каналу на двух датчиках силы); L - расстояние от центра подвеса до центра датчика силы; kдс - коэффициент передачи датчика силы; Н - кинетический момент гироскопа.
- масштабный коэффициент датчика момента; I - ток в катушке датчика момента (построен по каждому каналу на двух датчиках силы); L - расстояние от центра подвеса до центра датчика силы; kдс - коэффициент передачи датчика силы; Н - кинетический момент гироскопа.
Недостаток прототипа состоит в сложности построения на его основе двухканального датчика угловой скорости, которая определяется квадратичной зависимостью между угловой скоростью и током датчика момента, что усложняет его применение при формировании законов управления конкретных систем.
Техническим результатом изобретения является упрощение построения двухканального датчика угловой скорости без потери точности измерения путем получение линейной зависимости между выходным параметром (напряжением) и входной измеряемой угловой скоростью без изменения конструкции гироскопа, что упрощает применение двухканального датчика угловых скоростей в различных системах стабилизации и управления.
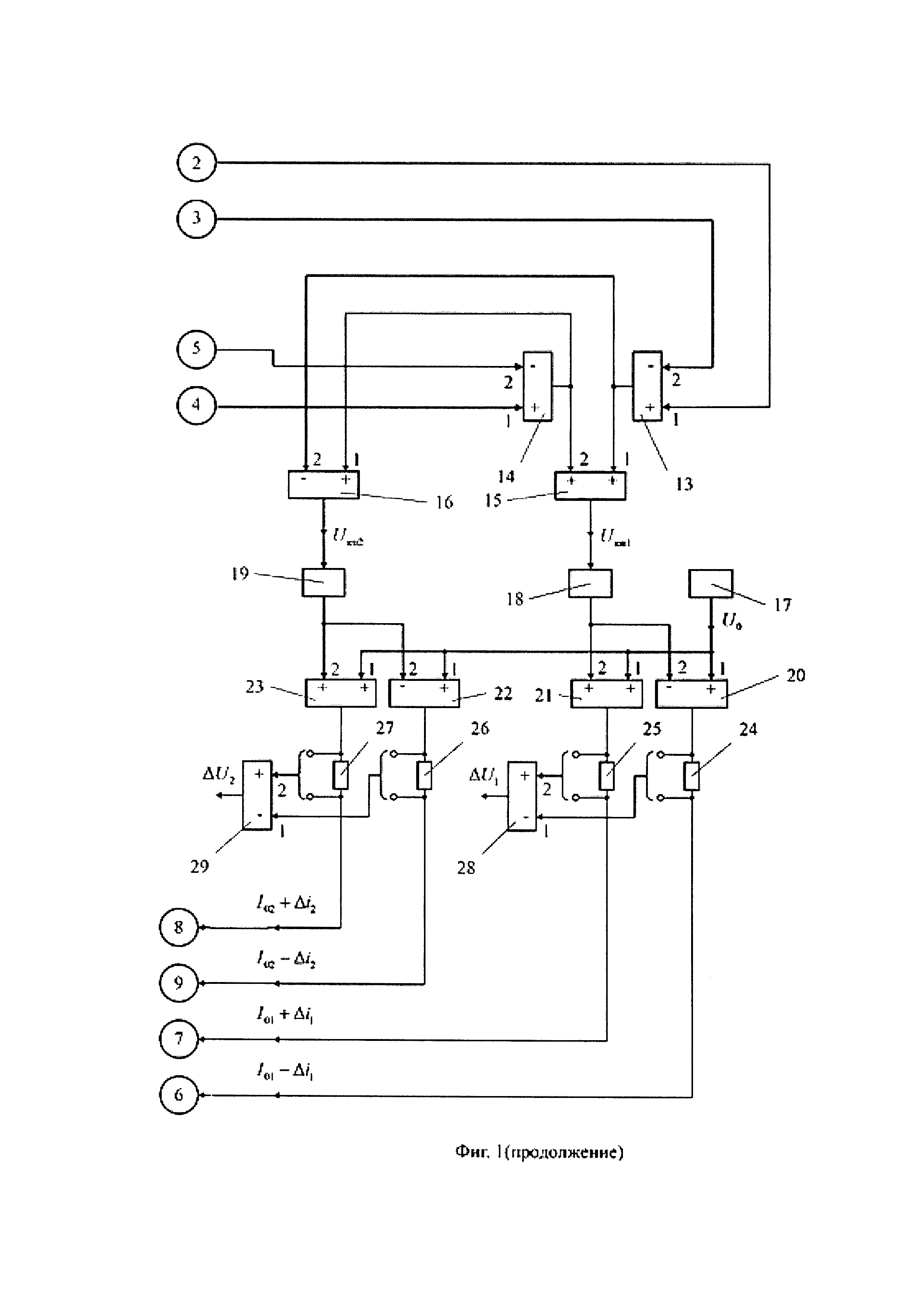
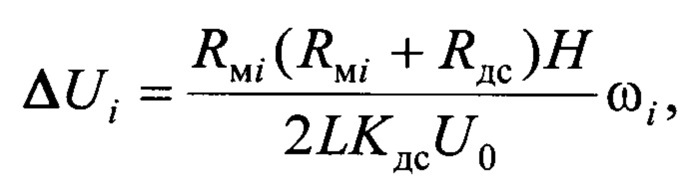
Технический результат достигается тем, что в гироскопе со сферической опорой подвеса ротора гиромотора колокольного типа, на основании которого по каждому каналу измерения диаметрально на взаимно перпендикулярных осях установлены по два датчика угла, выходы которых подключены к первому и второму входам дифференциальных сумматоров, а по каждому каналу управления диаметрально на взаимно перпендикулярных осях установлены по два датчика силы, причем между осями размещения датчиков углов и датчиков силы имеется угол, равный 45 градусов, новым является то, что в каналы управления введены первый и второй координатные преобразователи, источник эталонного напряжения, первый и второй усилители каналов управления, первый - четвертый сумматоры, первый - четвертый масштабные резисторы и два выходных суммирующих усилителя, при этом выходы первого и второго дифференциальных сумматоров подключены на первый и второй входы координатных преобразователей, выходы которых через первый и второй усилители каналов управления подключены на вторые входы первого и второго и, соответственно, третьего и четвертого сумматоров, с первым входом которых соединен источник эталонного напряжения, причем выходы первого и второго сумматоров через первый и второй масштабные резисторы соединены соответственно с датчиками силы первого канала управления, а выходы третьего и четвертого сумматоров через третий и четвертый масштабные резисторы соединены соответственно с датчиками силы второго канала управления, а выходные сигналы двухканального датчик угловой скорости формируются, для первого канала управления, как разность напряжений, снимаемых с первого и второго масштабных резисторов и поступающих на первый и второй входы первого выходного суммирующего усилителя, а для второго канала управления, как разность напряжений, снимаемых с третьего и четвертого масштабных резисторов и поступающих на первый и второй входы второго выходного суммирующего усилителя, и определяются по формулам
где ΔUi, Rмi, ωi, i = 1-2 - выходные напряжения, сопротивления масштабных резисторов и измеряемые угловые скорости для первого и второго каналов;
Rдс - активное сопротивление датчиков силы;
L - расстояние между датчиками силы и центром подвеса;
Kдс - коэффициент передачи датчиков силы;
U0 - напряжение эталонного источника;
Н - кинетический момент гироскопа;
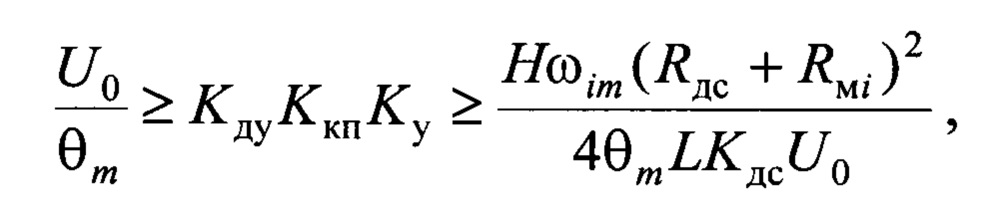
а для суммарного коэффициента усиления между датчиками углов и сумматорами обоих каналов управления должно выполняться неравенство
где Kду - коэффициент передачи датчиков угла;
Kкп - коэффициент передачи координатных преобразователей;
Kу - коэффициент передачи усилителей;
ωim - максимальная измеряемая скорость;
θm = βm = αm - допустимый угол отклонения ротора относительно основания.
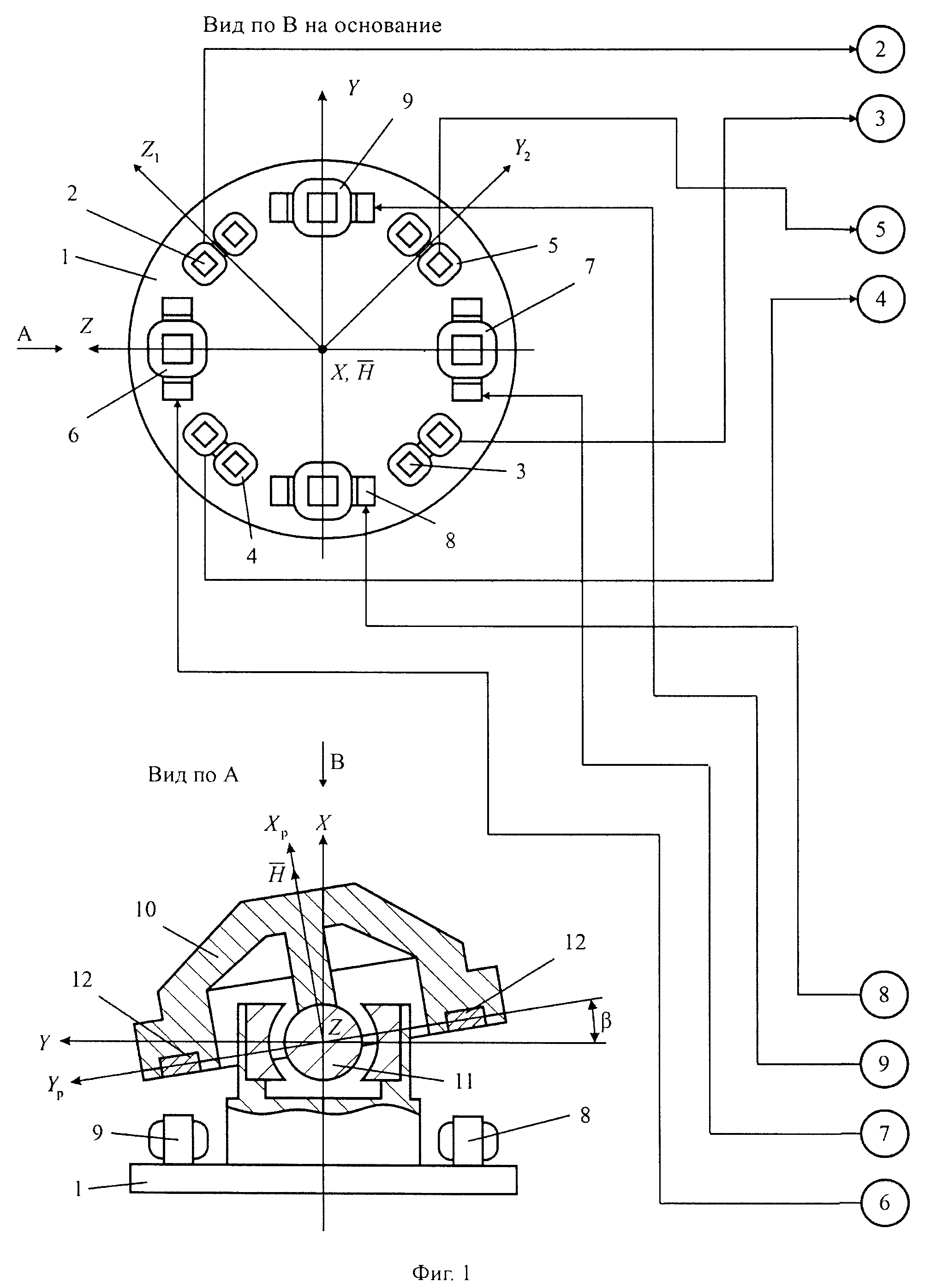
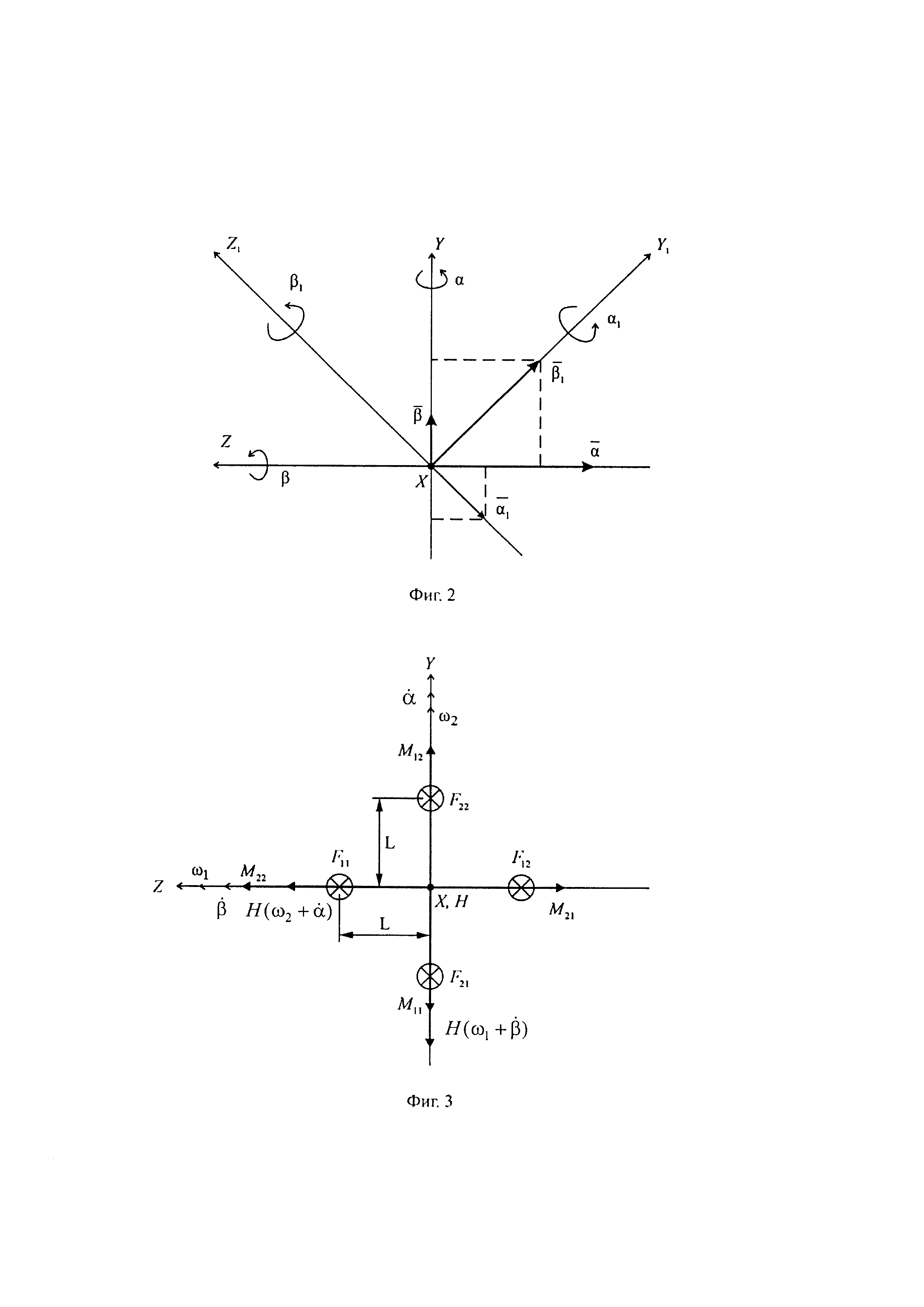
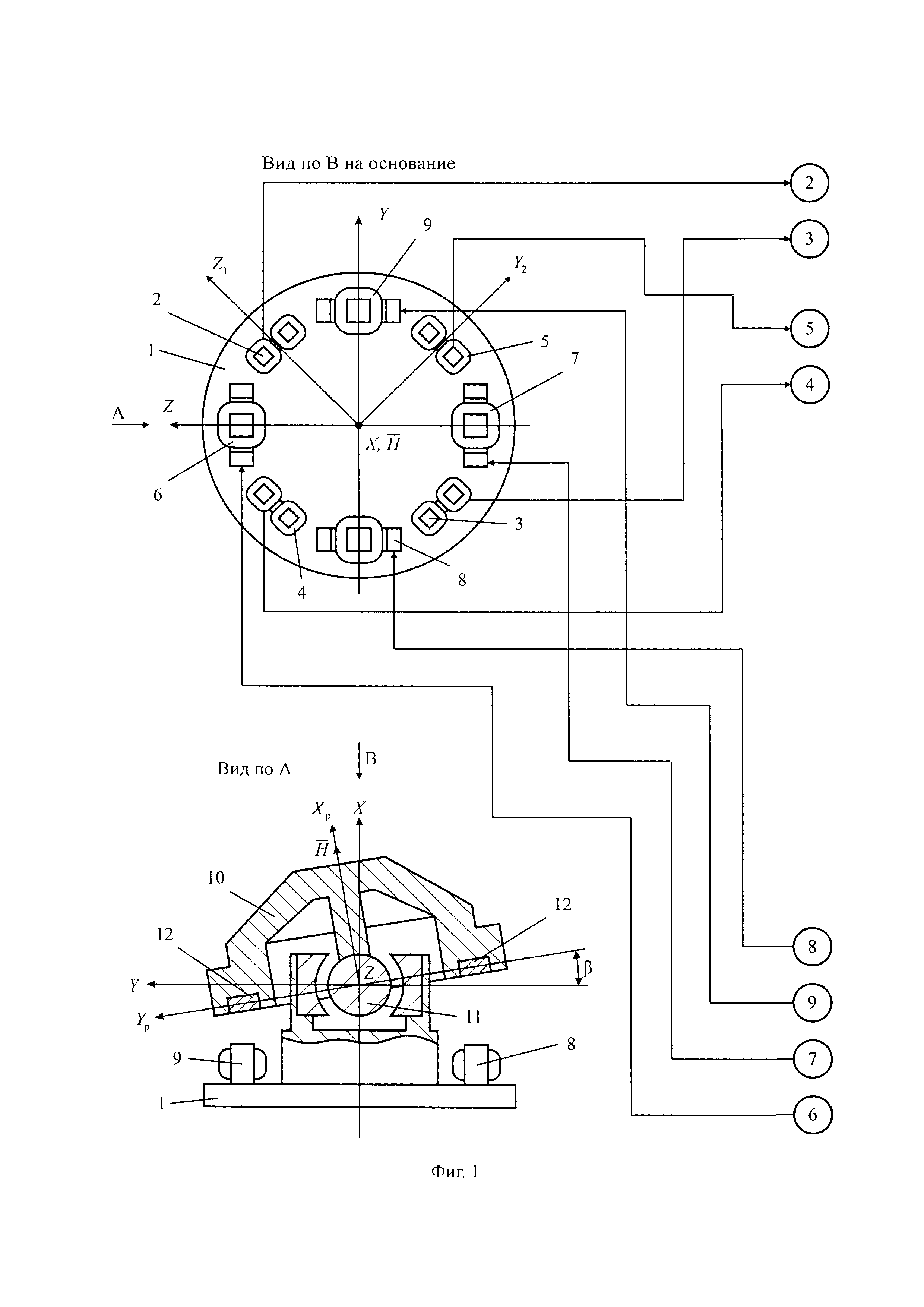
Сущность изобретения поясняется фигурами, где фиг. 1 - структурно-кинематическая схема двухканального датчика угловой скорости, приведенная на двух листах; фиг. 2 - взаимное положение систем координат, поясняющих работу координатного преобразователя; фиг. 3 - расположение датчиков силы с пояснением создания управляющих моментов.
На фиг. 1 - фиг. 3 приняты следующие обозначения:
1 - корпус (основание);
2, 3 - датчики угла, измеряющие угол поворота ротора относительно оси Y1;
4, 5 - датчики угла, измеряющие угол поворота ротора относительно оси Z1;
6, 7 - датчики силы, формирующие момент относительно оси Y (для первого канала управления);
8, 9 - датчики силы, формирующие момент относительно оси Z (для второго канала управления);
10 - ротор гироскопа (двигатель условно не показан);
11 - сферическая шарикоподшипниковая опора;
12 - ротор датчиков угла и датчиков силы;
13, 14 - первый и второй дифференциальные сумматоры, осуществляющие дифференциальное включение соответствующих датчиков углов 2 и 3, 4 и 5;
15, 16 - первый и второй координатные преобразователи;
17 - источник эталонного напряжения;
18, 19 - первый и второй усилители каналов управления;
20, 21 - первый и второй сумматоры;
22, 23 - третий и четвертый сумматоры;
24, 25 - первый и второй масштабные резисторы;
26, 27 - третий и четвертый масштабные резисторы;
28, 29 - первый и второй выходные суммирующие усилители;
Н - кинетический момент ротора гироскопа;
Y1Z1 - оси измерения, определяемые положением датчиков углов;
YZ - оси управления, определяемые положением датчиков силы, являются входными осями для угловых скоростей ωZ, ωY первого и второго каналов;
α1, β1 - углы поворота ротора относительно основания по осям измерения Y1 и Z1 соответственно;
α, β - углы поворота ротора относительно основания по осям управления Y и Z соответственно;
 - угловые скорости поворота ротора относительно основания по осям управления Y и Z соответственно;
- угловые скорости поворота ротора относительно основания по осям управления Y и Z соответственно;
 - малые вектора, интерпретирующие поворот ротора относительно основания по осям измерения Y1 и Z1 соответственно;
- малые вектора, интерпретирующие поворот ротора относительно основания по осям измерения Y1 и Z1 соответственно;
 - малые вектора, интерпретирующие поворот ротора относительно основания по осям управления Y и Z соответственно;
- малые вектора, интерпретирующие поворот ротора относительно основания по осям управления Y и Z соответственно;
L - расстояние между датчиками силы и центром подвеса;
ΔU1, ΔU2 - выходные напряжения двухканального датчика угловой скорости для первого и второго каналов;
Rм1, Rм2 - сопротивления масштабных резисторов для первого и второго каналов;
Rдс - активное сопротивление обмотки датчиков силы;
Kдс - коэффициент передачи датчиков силы;
U0 - напряжение эталонного источника;
ω1, ω2 - измеряемые угловые скорости по первому и второму каналам;
F11, F12 - электромагнитные силы, создаваемые датчиками силы 6 и 7 соответственно;
F21, F22 - электромагнитные силы, создаваемые датчиками силы 8 и 9 соответственно;
М11, М12 - моменты, создаваемые силами F11, F12 относительно оси Y;
М21, М22 - моменты, создаваемые силами F21, F22 относительно оси Z.
Двухканальный датчик угловой скорости построен на базе гироскопа со сферической опорой, который на фиг. 1 представлен в упрощенном виде, достаточным для пояснения существа изобретения. На основании 1 закреплены статоры датчиков углов индуктивного типа (торцевые) и статоры датчиков силы электромагнитного типа. При этом датчики углов 2 и 3 измеряют угол поворота α1 вокруг оси Y1, а датчики углов 4 и 5 - угол поворота β1 вокруг оси Z1. Датчики силы попарно образуют датчики моментов и относительно датчиков углов повернуты на угол 45°. При этом датчики силы 6 и 7 формируют момент относительно оси Y для первого канала управления, датчики силы 8 и 9 формируют момент относительно оси Z второго канала управления. Ротор гироскопа 10 вращается в сферической шарикоподшипниковой опоре 11 (гиромотор условно не показан). В ротор 10 вмонтировано кольцо 12 (например, из феррита), которое является одновременно ротором датчиков углов 2-5 и ротором датчиков силы 6-9. Датчики углов 2-3 и 4-5 подключены на первый и второй входы первого и второго дифференциальных сумматоров 13 и 14 соответственно. При отклонении на углы разных знаков на выходах дифференциальных сумматоров 13 и 14 будут формироваться сигналы, фазы которых будут сдвинуты по фазе на 180°. Выходы дифференциальных сумматоров 13 и 14 подключены на первые и вторые входы первого и второго координатных преобразователей 15 и 16, которые преобразуют сигналы, пропорциональные углам α1, β1 относительно осей измерения Y1 и Z1, в сигналы, пропорциональные углам α, β, относительно осей управления Y и Z. Координатные преобразователи 15 и 16 построены на операционных усилителях, и их работа в соответствии с фиг. 2 определяется алгоритмами


где Uкп1, Uкп2 - выходные напряжения координатных преобразователей;
Kду, Kкп = 0,707 - коэффициенты передачи датчиков углов и координатных преобразователей.
Выходы координатных преобразователей подключены на входы первого и второго усилителей каналов управления 18 и 19 соответственно, которые усиливают сигналы переменного тока по напряжению и мощности и преобразуют в напряжение постоянного тока с коэффициентом передачи Kу.
Выход источника эталонного напряжения 17 подключен одновременно на первые суммирующие входы первого - четвертого сумматоров 20-23, при этом выход первого усилителя канала управления 18 соединен со вторыми входами первого 20 и второго 21 сумматоров со знаками минус и плюс соответственно, а выход второго усилителя канала управления 19 соединен со вторыми входами третьего 22 и четвертого 23 сумматоров со знаками минус и плюс соответственно. Выходные сигналы сумматоров 20-23 является управляющими сигналами датчиками силы 6 и 7, 9 и 8, которые являются исполнительными элементами первого и второго каналов управления и в цепи которых последовательно включены первый и второй масштабные резисторы 24 и 25 (с сопротивлением Rм1), третий и четвертый масштабные резисторы 26 и 27 (с сопротивлением Rм2) соответственно. Масштабные резисторы необходимы для измерения токов датчиков силы. Для формирования выходных сигналов ΔU1, ΔU2 двухканального датчика угловой скорости, которые будут пропорциональны измеряемым угловым скоростям ω1, ω2 по первому и второму каналам управления, сигналы с первого и второго масштабных резисторов 24 и 25 поступают на первый (вычитающий) и второй (суммирующий) входы первого выходного суммирующего усилителя 28, а сигналы с третьего и четвертого масштабных резисторов 26 и 27 поступают на первый (вычитающий) и второй (суммирующий) входы второго выходного суммирующего усилителя 29.
Для пояснения измерения угловых скоростей двухканальным датчиком угловых скоростей составим в соответствии с фиг. 3 прецессионные уравнения относительно осей каналов управления YZ


где


 - токи в датчиках силы 6 и 7, 8 и 9, обусловленные действием напряжением эталонного источника 17;
- токи в датчиках силы 6 и 7, 8 и 9, обусловленные действием напряжением эталонного источника 17;
 - токи в датчиках силы 6 и 7, 8 и 9, обусловленные напряжениями, возникающими от углов отклонения ротора 10 и основания 1 за счет действия угловых скоростей ω1 и ω2.
- токи в датчиках силы 6 и 7, 8 и 9, обусловленные напряжениями, возникающими от углов отклонения ротора 10 и основания 1 за счет действия угловых скоростей ω1 и ω2.
В установившемся режиме, когда  равны нулю, уравнения (1) и (2) принимают вид
равны нулю, уравнения (1) и (2) принимают вид


из которых определяем значения токов Δi1 и Δi2
Выходные напряжения ΔU1 и ΔU2 формируются на первом и втором выходных суммирующих усилителях 28 и 29 следующим образом.
В первом канале управления формируется ω1

Во втором канале управления формируется ω2

Или в обобщенной записи

Таким образом, несмотря на квадратичную зависимость сил, создаваемых датчиками силы в зависимости от тока, выходные характеристики по угловым скоростям имеют линейную зависимость.
Однако, для корректной работы датчиков силы необходимо, чтобы при действии максимальных входных угловых скоростях  и
и  ротор гарантированно не доходил до ограничительного упора.
ротор гарантированно не доходил до ограничительного упора.
Запишем эти условия в виде неравенств для одного канала, например, канала измерения
Условие для силовой части

из которого находим первое условие для суммарного коэффициента усиления

Второе условие получаем из соотношения между эталонным током и током, соответствующим максимальному углу отклонения

из которого следует

Следовательно, неравенства (3) и (4) можно представить в виде одного

Аналогичное неравенство и для параметров второго канала измеряемой угловой скорости

Так как каналы двухканального датчика угловой скорости идентичны, то неравенства (5) и (6) можно представить одним обобщенным

где θm = αm = βm - обобщенное обозначение углов отклонения.
Пример выбора параметров.
Исходные данные:  ; βm = αm = 10 угл. мин; U0 = 10B.
; βm = αm = 10 угл. мин; U0 = 10B.
Исходя из габаритов и параметров источника питания, предварительно рассчитаны: H = 10-2 Нмс; L = 1,2⋅10-2 м; Rдс = 50 Ом; Rм1 = Rм2 = 150 Ом; 
Для представленных параметров неравенство (5) примет вид


Выходное напряжение по первому каналу равно

Для максимальной угловой скорости  выходное напряжение равно ΔU1 = 7,5 В, что вполне удовлетворительно, и оно может быть промасштабировано до необходимого уровня, например, 10 В на диапазон.
выходное напряжение равно ΔU1 = 7,5 В, что вполне удовлетворительно, и оно может быть промасштабировано до необходимого уровня, например, 10 В на диапазон.
Аналогичные выкладки можно привести и для второго канала.
С приведенными параметрами работа двухканального датчика угловых скоростей была промоделирована по прецессионной и полной моделям при действии скачкообразной и гармонической входных угловых скоростей. Моделирование подтвердило хорошую адекватность (совпадение) с теоретическими выкладками.
Таким образом, используя достоинства гироскопа с подвесом ротора на сферическом шарикоподшипнике (малые габариты и стоимость по сравнению с динамически настраиваемыми гироскопами, осреднение моментов дрейфа) в предлагаемом устройстве за счет схемных решений построена линейная зависимость выходных напряжения от измеряемых угловых скоростей, что упрощает применение двухканального датчика угловых скоростей в различных системах стабилизации и управления.
Способ определения углов наклона блока инерциальных измерителей комплексной системы угловой ориентации относительно плоскости горизонта
Климатическая система транспортного средства
Устройство определения углов наклона блока инерциальных измерителей комплексной системы угловой ориентации относительно плоскости горизонта
Злаковый батончик для питания работающих с ртутью и ее неорганическими соединениями
Механизм машущего крыла
Цилиндропоршневая группа двигателя внутреннего сгорания
Мотор-колесо
Способ лазерной сварки заготовок больших толщин
Способ лазерной термической обработки металлического листа
Трехкомпонентный струйный преобразователь угловой скорости
Гироскопический маятник
Тренажер для изучения гирополукомпаса
Устройство управления креновой рамой курсовертикали
Устройство создания нагрузочного момента двигателя постоянного тока
Способ определения параметров моментного двигателя постоянного тока

