Результат интеллектуальной деятельности: СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к навигации и предназначено для определения координат подвижного объекта на взлетно-посадочной полосе (рулежной дорожке, автодороге и т.д.). Может использоваться как для автономной работы, так и для работы в комплексе с другими навигационными системами.
Известен способ определения ориентации подвижного объекта по координатам реперных источников (РИ), включающий определение сигналов, соответствующих положению изображения РИ в плоскости фотодетектора, определение углов пеленгов каждого РИ по полученным сигналам с учетом фокусного расстояния объектива и определение координат РИ по данным углов-пеленгов с учетом расстояния между РИ.
Этот способ реализован в устройстве, содержащем реперные источники на подвижном объекте, а на неподвижном - два фотоприемных оптико-локационных блока и блок определения координат РИ и ориентации подвижного объекта, описанный в патенте на изобретение [GB 2002986 А, опубл. 28.02.1979.]
Недостатком описанного аналога является использование реперных источников с известным расположением на подвижном объекте, а также определение только ориентации подвижного объекта при неизвестном местоположении.
Известен наиболее близкий к заявляемому изобретению способ определения местоположения и угловой ориентации подвижного объекта относительно взлетно-посадочной полосы (ВПП), основанный на приеме излучения трех наземных лазерных маяков, установленного на борту подвижного объекта и системы (световых контрастов), описанный в патенте на изобретение [RU 2347240, опубл. 20.02.2009] Определяют координаты изображений лазерных маяков на фоточувствительной матрице, а затем вычисляют координаты и угловое положение подвижного объекта относительно ВПП.
Недостатком этого способа является низкая точность определения координат на значительных удалениях от маяков, что обусловлено квадратичной зависимостью погрешностей от дальности до маяков.
Технический результат при использовании изобретения заключается в повышении точности измерения координат местоположения на всей ВПП (рулежной дорожке), это достигается применением ряда кодовых меток с известными координатами установленных вдоль ВПП таким образом, чтобы в каждый момент времени по меньшей мере три метки находились в поле зрения фотокамеры, поэтому процесс измерения осуществляется при наилучшем их взаимном расположении.
Указанный технический результат изобретения достигается тем, что в способе навигации подвижного объекта, основанном на фотоэкспонировании земной поверхности фотокамерой, обработке их оцифрованного изображения и вычислении координат местоположения подвижного объекта, осуществляют последовательное фотоэкспонирование земной поверхности с установленными на ней кодовыми метками, посредством фотокамеры, установленной на подвижном объекте, выделяют на каждом изображении группу, по меньшей мере из трех кодовых меток, определяют координаты их центров в связанной системе координат, считывают с каждой метки ее код и по нему определяют координаты метки в горизонтальной системе координат, вычисляют линейные и угловые координаты подвижного объекта, а также координаты и габариты препятствий на взлетно-посадочной полосе.
Сущность изобретения состоит в том, что осуществляется:
последовательное фотоэкспонирование земной поверхности с установленными на ней кодовыми метками посредством фотокамеры установленной на подвижном объекте;
выделение на каждом изображении группы, по меньшей мере из трех кодовых меток и определении координат центров кодовых меток в связанной системе координат;
считывании с каждой метки ее кода и определении по нему координат метки в горизонтальной системе координат;
вычислении линейных и угловых координат подвижного объекта, а также координат и габаритов препятствий на ВПП.
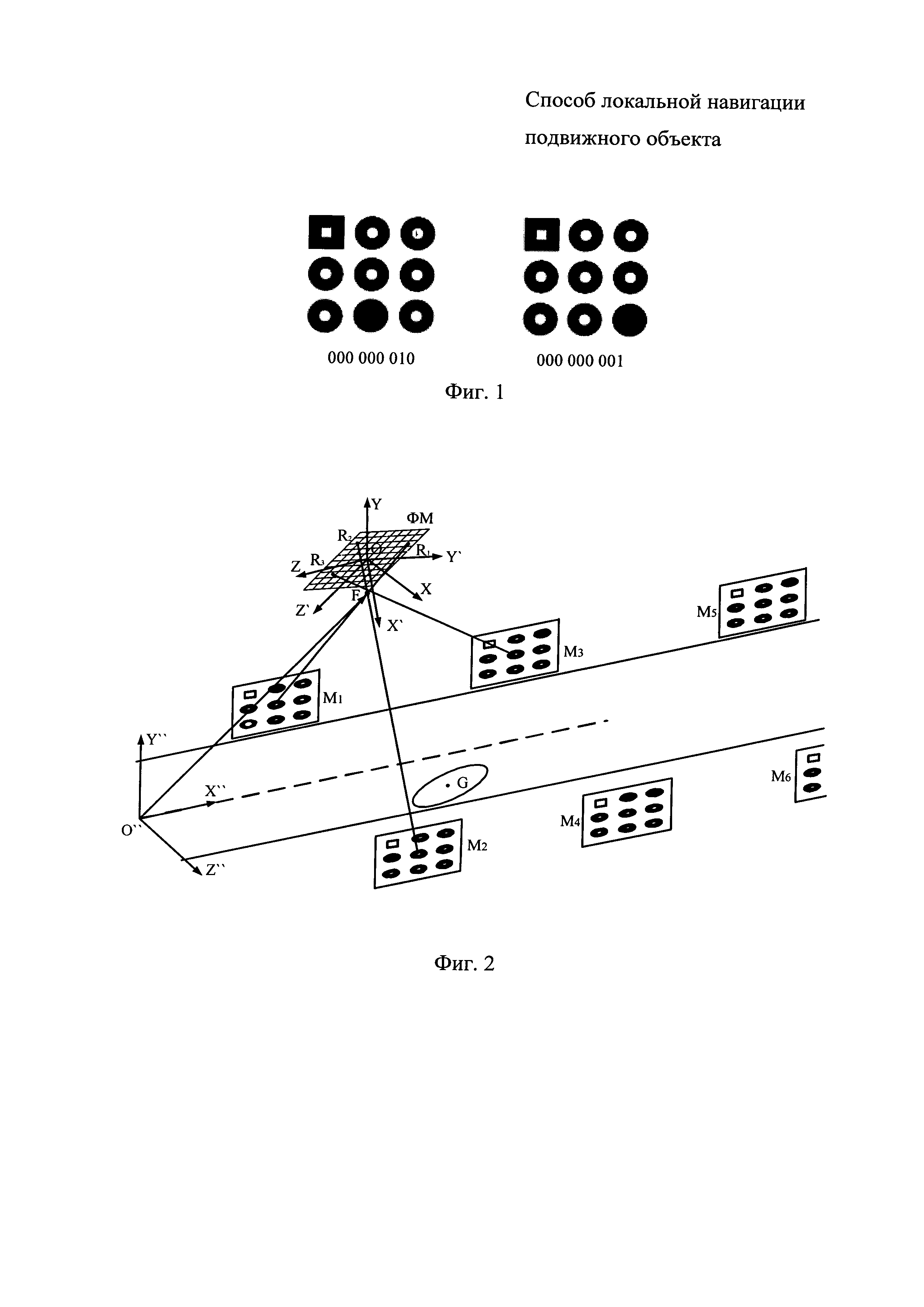
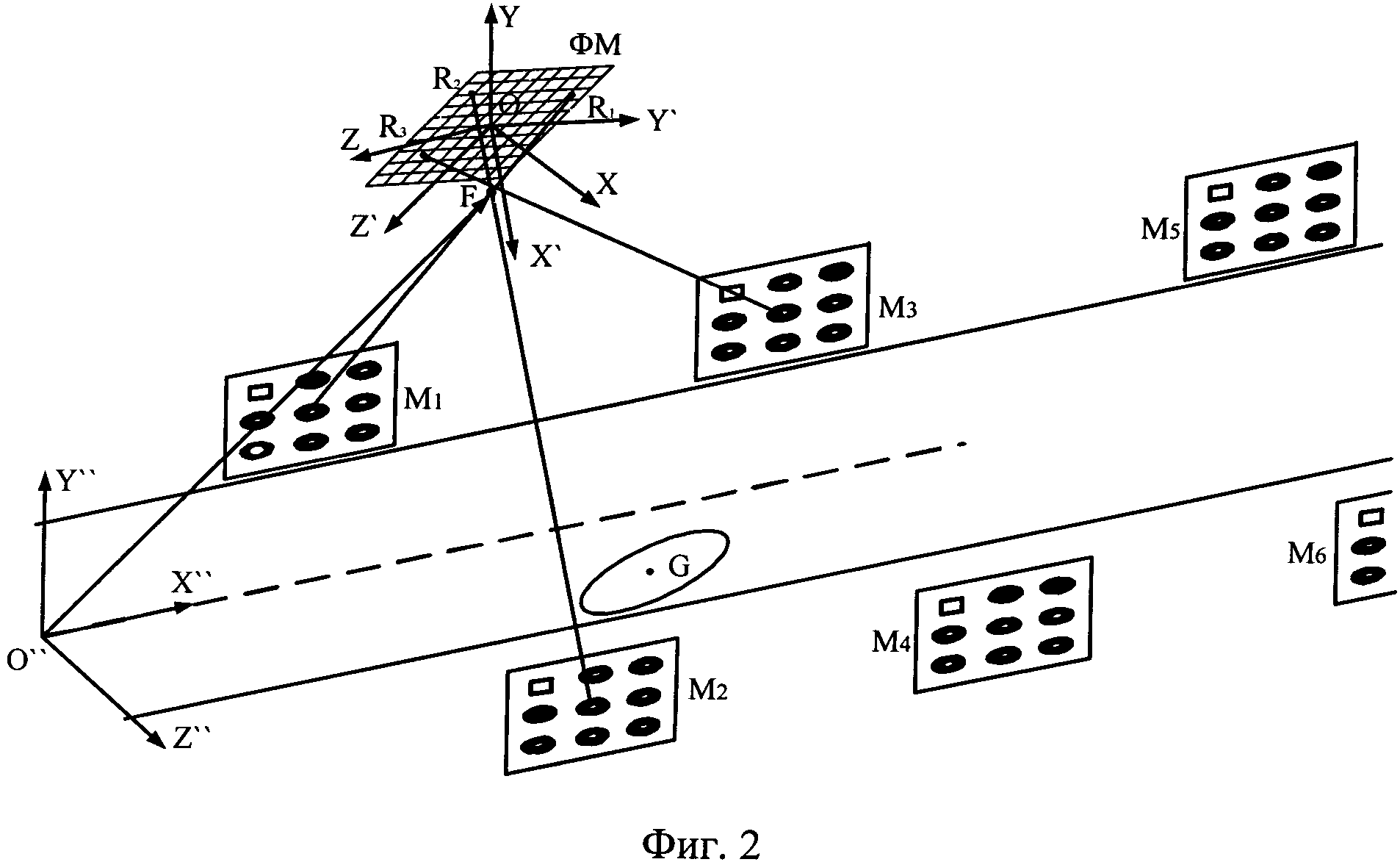
Сущность изобретения поясняется на фиг. 1 и фиг. 2.
На фиг. 1 показаны примеры девятиразрядных кодовых меток с двоичными кодами 000 000 001 и 000 000 010.
На фиг 2 показана оптическая схема измерений посредством фотокамеры, где обозначены:
OXYZ - связанная с подвижным объектом система координат (ОХ - продольная ось, OY - нормальная ось, OZ - поперечная ось - ГОСТ 20058-80);
O'X'Y'Z' - измерительная система координат, связанная с фотоматрицей (ось О'Х' оптическая ось цифровой фотокамеры, O'Y' и O'Z' - оси симметрии фотоматрицы);
O''X''Y''Z'' - нормальная система координат, связанная с ВПП (O''Х'' - ось симметрии ВПП, O''Y'' - вертикальная ось, O'Z' - образует правую систему координат);
F - оптический центр фотообъектива;
ФМ - фотоматрица;
М1 М2, М3 - центры навигационных меток;
R1, R2, R3 - изображения меток; G - центр воронки.
Задача определения координат подвижного объекта решается путем использования необходимого числа стационарных оптических навигационных меток, вдоль ВПП, координаты которых на земной поверхности известны, а положение подвижного объекта относительно меток определяется оптико-электронными средствами. Для достоверного распознавания меток их нумеруют посредством кода, а их координаты в системе O''X''Y''Z'' определяются по кодированным номерам. Может быть использована технология, известная под названием штрих-код, успешно работающая при маркировании изделий. Используем многострочную девятиразрядную кодовую метку (3×3) с емкостью 29=512, показанную на фиг. 1.
Подвижный объект оснащен монокулярной гиростабилизированной фотокамерой, связанной с вычислителем, который, по изображениям, поступающим с фотоматрицы, решает задачу определения координат точек фотографируемого ландшафта ВПП. Все навигационные метки лежат в горизонтальной плоскости.
В поле изображения ВПП или рулежной дорожки выделяют группу навигационных меток (M1, М2, М3…), выбирают центральные точки в поле изображения меток и определяют координаты этих точек на фотоматрице yn, zn, где индекс n=1,2,3… - кодовый номер метки соответственно. При этом между координатами этих точек в нормальной системе O''Х''Y''Z'' и кодовыми номерами установлено соответствие.
Изображения центральной метки на фотоматрице, в которых закодированы 0 ли 1, представляет собой фигуру, близкую к кругу, диаметром десятки пикселов, причем в зависимости от записанного кода это изображение может быть в виде кольца либо круга. Определение координат центра этого изображения выполняется при наличии шумов фотоматрицы, накладываемых на собственно изображение, полученное объективом при различных условиях освещения и с различных ракурсов. Поэтому для решения этой задачи с погрешностью не более 0.1 пиксела, учитывается интегральная яркость всего изображения круга
Центр функции яркости изображения метки может быть определен подобно тому, как вычисляется центр массы объемного тела [Справочник по математике для учащихся втузов. Бронштейн И.Н., Семендяев К.А.- М.: Наука, 1981. - С. 332].
где r - размер пиксела;
 - интегральная яркость изображения области Wn;
- интегральная яркость изображения области Wn;
Wn - внутренняя область изображения метки, удовлетворяющая условию
R(i, j) ≥ Rnop;
Vn - внешняя область изображения метки, удовлетворяющая условию
R(i, j) < Rnop, при этом внешней границей области Vn является окружность радиусом равным диаметру внутренней границы области Vn;
R(i, j) - яркость пикселов в зависимости от номера строки i и столбца j;
 - пороговое значение функции яркости;
- пороговое значение функции яркости;
Iвн - число пикселов во внутренней области W изображения метки;
Iвнеш - число пикселов во внешней области V изображения метки,


 единичные орты связанной системы координат OXYZ;
единичные орты связанной системы координат OXYZ;


 единичные орты измерительной системы координат O'X'Y'Z';
единичные орты измерительной системы координат O'X'Y'Z';
 ,
,  ,
,  единичные орты нормальной системы координат O''X''Y''Z''; F - фокусное расстояние фотообъектива, м.
единичные орты нормальной системы координат O''X''Y''Z''; F - фокусное расстояние фотообъектива, м.
Единичные орты 

 и
и  ,
,  ,
,  связаны между собой известным соотношением
связаны между собой известным соотношением

где bij - элементы матрицы направляющих косинусов (в), i-1…3, j-1...3. 
где углы θυ, θψ, θγ - ориентации карданова подвеса относительно связанной системы
Единичные орты  связаны между собой соотношением
связаны между собой соотношением

где αij - элементы матрицы направляющих косинусов (A), i-1…3, j-1…3.

ψ - угол рыскания, υ- угол тангажа, γ - угол крена.
Преобразование координат произвольного вектора из связанной системы координат OXYZ в нормальную систему координат O''X''Y''Z'', осуществляется посредством известного соотношения, учитывающего только взаимное угловое положение систем координат. Связь между старыми и новыми координатами вектора для случая, когда оба базиса являются ортонор-мированными, задается следующей формулой:

Тогда координаты измерительной и нормальной систем связаны посредством следующего соотношения

Необходимо определить координаты подвижного объекта 

 и центра воронки
и центра воронки 

 в нормальной системе координат, ее полуоси α, β и глубину h.
в нормальной системе координат, ее полуоси α, β и глубину h.
Вектор, описывающий пространственное положение объектива в системе O''X''Y''Z'' (точка F) относительно n-го маяка обозначим FMn'':
где  ,
,  ,
,  - координаты вектора
- координаты вектора  ,
, 

 - искомые координаты вектора FO'' (положение объектива в системе O''X''Y''Z'').
- искомые координаты вектора FO'' (положение объектива в системе O''X''Y''Z'').
Спроецируем вектор  на оси измерительной системы координат O'X'Y'Z' для чего используем соотношение
на оси измерительной системы координат O'X'Y'Z' для чего используем соотношение
Вектор  в системе координат O'X'Y'Z' выражается следующим образом
в системе координат O'X'Y'Z' выражается следующим образом
Вектора  и
и  лежат на одной прямой, поэтому должны удовлетворять условию коллинеарности
лежат на одной прямой, поэтому должны удовлетворять условию коллинеарности

В скалярном виде это условие перепишется в следующем виде


Поскольку полученные уравнения линейно-зависимы, что легко проверяется, то отбрасывая первое из них и преобразуя два других, получим
При наличии шести неизвестных двух полученных уравнений недостаточно для решения задачи об определении местоположения подвижного объекта, поэтому используем три разнесенных кодовых метки (n=1,2,3…), которые не расположены на одной прямой.
Таким образом, полученные уравнения связывают шесть неизвестных переменных  при этом величины
при этом величины  , F известны.
, F известны.
Пусть рамы гиростабилизированной платформы развернуты на углы θψ=0, θυ= -π/2, θγ=0, тогда матрица
Расположим метки вокруг ВПП как показано на фиг. 2 следующим образом, 
 L/2, где L - ширина ВПП, k - номер метки
L/2, где L - ширина ВПП, k - номер метки
При таком расположении каждая тройка меток образует равносторонний треугольник. С учетом принятого расположения для трех последовательных меток и камеры уравнения (6) примут следующий вид
Путем решения системы уравнений (8) определяют координаты подвижного объекта  γ, υ, ψ из любой точки над ВПП, при этом решение такой системы осуществляется методом последовательных приближений, который обеспечивает очень быструю сходимость.
γ, υ, ψ из любой точки над ВПП, при этом решение такой системы осуществляется методом последовательных приближений, который обеспечивает очень быструю сходимость.
Определение координат точечного объекта на ВПП
Определение координат точечного объекта (центр воронки, мина, посторонние предметы и т.д.) на ВПП  осуществляется по координатам его изображения на фотоматрице
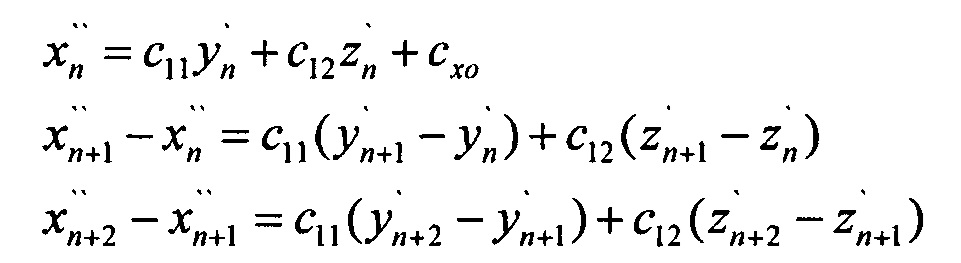
осуществляется по координатам его изображения на фотоматрице  Учитывая линейный характер преобразования изображения посредством фотообъектива связь координат точечных объектов на ВПП и их изображений на фотоматрице описывается следующим образом.
Учитывая линейный характер преобразования изображения посредством фотообъектива связь координат точечных объектов на ВПП и их изображений на фотоматрице описывается следующим образом.

Неизвестные параметры с11, с12, cxo, с21, с22, сz0 определяются подстановкой в эти соотношения известных координат трех навигационных меток
Рассматривая три четных и три нечетных уравнения этой системы, запишем две системы трех уравнений
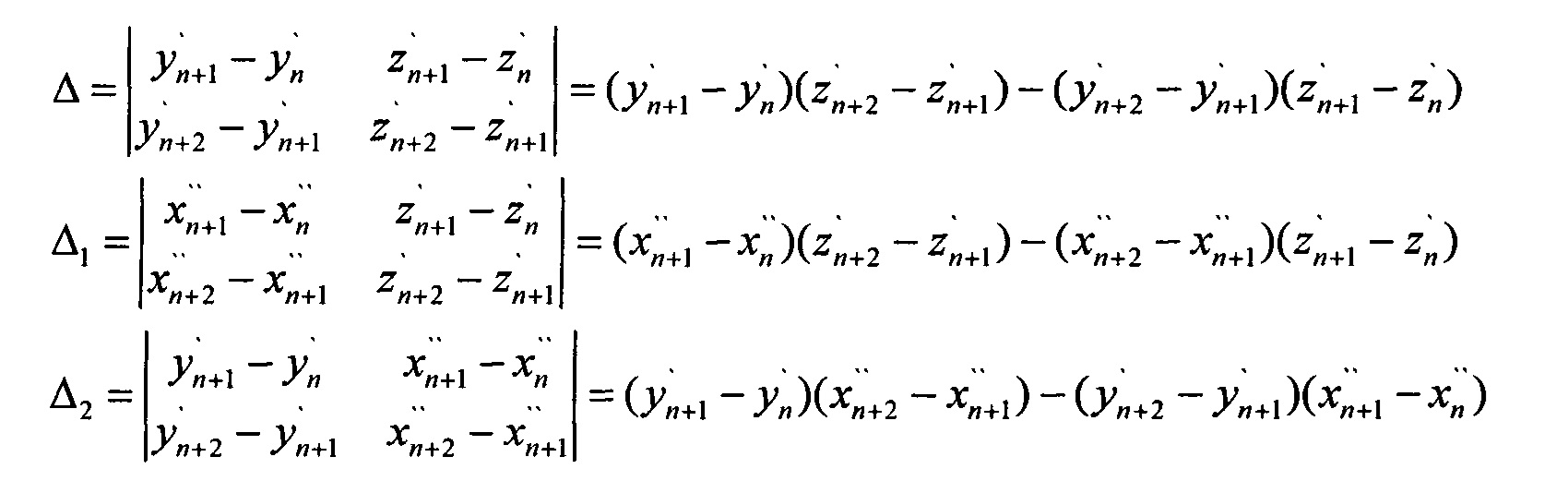
Заменим второе уравнение системы (10) на разность второго уравнения и первого, а третье заменим на разность второго и третьего, получим
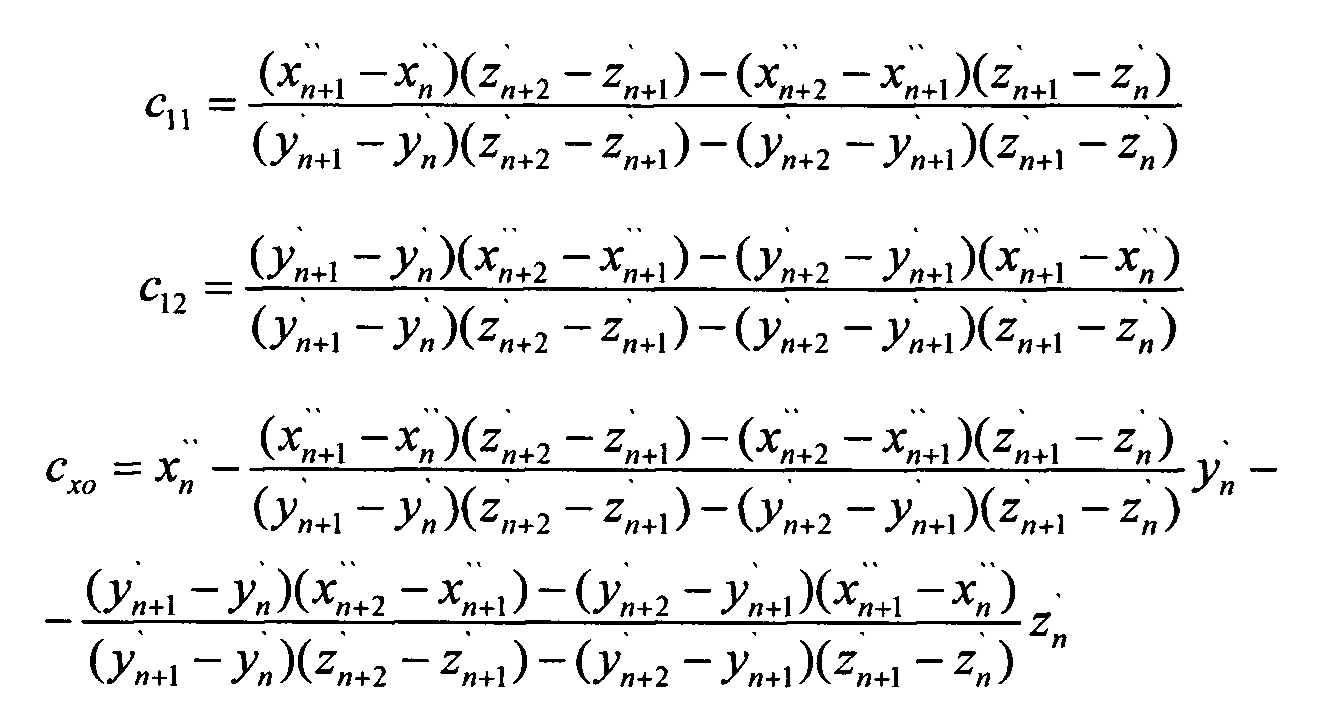
Их решение имеет вид
Заменим второе уравнение системы (11) на разность второго уравнения и первого, а третье заменим на разность второго и третьего, получим
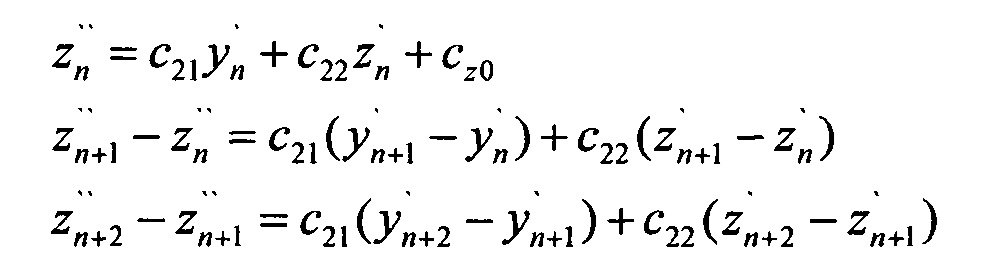
Их решение имеет вид
Решения систем (10) и (11) используются для вычисления координат 
 точечного объекта с координатами его изображения на фотоматрице
точечного объекта с координатами его изображения на фотоматрице 

Вычисление площади воронки
Эта задача решается с учетом масштабирования изображения, которое описывается системой (9). Подсчитывается число пикселов на изображении воронки, а затем вычисляется площадь воронки
где k - номер препятствия (воронки).
Матрица преобразования изображения записывается следующим образом
где  - определитель матрицы С.
- определитель матрицы С.
Поскольку определитель матрицы  то эта матрица описывает поворот изображения объекта, а множитель
то эта матрица описывает поворот изображения объекта, а множитель  - масштабный коэффициент преобразования линейных размеров объекта. Поэтому площадь воронки вычисляется следующим образом.
- масштабный коэффициент преобразования линейных размеров объекта. Поэтому площадь воронки вычисляется следующим образом.

где N - число пикселов на изображении воронки,  - линейный размер пиксела фотоматрицы.
- линейный размер пиксела фотоматрицы.
Способ обеспечения посадки вертолета
Теплообменный аппарат
Способ определения процентного соотношения жидкой фазы в криогенном газожидкостном потоке
Способ ультразвукового контроля твердости полимеров
Способ извлечения тирозина и витамина b из водного раствора
Несущий винт вертолета
Глиссадный радиомаяк
Способ навигации подвижного объекта
Полосовой усилитель
Способ обработки сигналов в тракте высокой частоты радиоприемных устройств
Способ определения расстояния до неподвижного источника излучения движущимся пеленгатором
Способ определения дальности до неподвижного источника излучения движущимся пеленгатором
Способ обеспечения посадки вертолета
Способ навигации подвижного объекта
Способ вывода самолета в точку начала посадки
Способ автоматического предотвращения теплового разгона никель-кадмиевой аккумуляторной батареи на борту воздушного судна по температуре аккумуляторной батареи
Способ управления многосекционным рулем летательного аппарата
Способ определения координат летательного аппарата относительно взлетно-посадочной полосы
Способ наведения летательного аппарата на источник излучения
Способ определения координат летательного аппарата относительно взлетно-посадочной полосы

