Результат интеллектуальной деятельности: Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый"
Вид РИД
Изобретение
Изобретение относится к радиоэлектронным системам управления (РЭСУ) летательными аппаратами и может быть использовано для самонаведения ракеты класса «воздух-воздух» на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где
Кϕг, Кϕв и Кϕг Кϕв - постоянные коэффициенты, значения которых выбираются таким образом, чтобы траектория наведения ракеты была близка к прямолинейной;
ϕг и ϕв - бортовые пеленги цели соответственно в горизонтальной и вертикальной плоскости;
ωг и ωв - угловые скорости вращения линии визирования «ракета-цель» соответственно в горизонтальной и вертикальной плоскости. При этом, бортовые пеленги и угловые скорости линии визирования «ракета-цель» измеряются в угломере радиолокационной головки самонаведения (РГС) ракеты [1].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на самолет из состава их пары (не разрешаемой в РГС ракеты по угловым координатам) по функциональному назначению самолета по принципу «ведущий-ведомый».
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где
N - навигационная постоянная;
V=λF/2 - скорость сближения ракеты с целью;
F - доплеровская частота, обусловленная скоростью сближения ракеты с целью и измеряемая в автоселекторе скорости РГС ракеты;
Jг и Jв - собственные ускорения ракеты соответственно в горизонтальной и вертикальной плоскости, измеряемые акселерометром ракеты [2].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на самолет из состава их пары, не разрешаемой в РГС ракеты, как по угловым координатам, так и по скорости сближения ракеты с самолетами пары (доплеровской частоте) по функциональному назначению самолета по принципу «ведущий-ведомый», поскольку данный способ предназначен для самонаведения ракеты только на одиночный самолет, а в случае наведения ее на пару самолетов ракета будет наводиться на самолет из состава пары случайным образом вне зависимости от предстартового целеуказания о наведении ракеты на ведущий (ВЩ) или ведомый (ВМ) самолет пары.
Цель изобретения - формирование параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух», позволяющих осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
Для достижения цели в способе формирования параметров рассогласования в РЭСУ ракетой класса «воздух-воздух» при ее самонаведении на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый», заключающимся в том, что в угломере РГС ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета - не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях, измерении с помощью акселерометра собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, дополнительно в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье (БПФ) на каждом к-ом такте его работы, к=1,…,I,…,К,
плоскостях, измерении с помощью акселерометра собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, дополнительно в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье (БПФ) на каждом к-ом такте его работы, к=1,…,I,…,К,
где К - общее количество тактов работы алгоритма БПФ;
I - количество тактов работы алгоритма БПФ, при достижении которого осуществляется вычисление автокорреляционных функций (АКФ) оценок траекторий доплеровских частот,
формируются два отсчета доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, не разрешаемой по угловым координатам в угломере РГС ракеты, путем фильтрации в соответствующих двух фильтрах сопровождения двух отсчетов доплеровских частот осуществляется формирование и запоминание значений двух оценок  и
и  траекторий доплеровских частот, при достижении количества тактов работы алгоритма БПФ, равного I, вычисляются две АКФ для соответствующих двух оценок траекторий доплеровских частот и определяются параметры первой АКФ, вычисленной по первой оценке
траекторий доплеровских частот, при достижении количества тактов работы алгоритма БПФ, равного I, вычисляются две АКФ для соответствующих двух оценок траекторий доплеровских частот и определяются параметры первой АКФ, вычисленной по первой оценке  траектории доплеровской частоты - время корреляции τ1, собственная частота f01 АКФ и среднеквадратическое отклонение (СКО) σ1 флюктуаций доплеровской частоты и параметры второй АКФ, вычисленной по второй оценке
траектории доплеровской частоты - время корреляции τ1, собственная частота f01 АКФ и среднеквадратическое отклонение (СКО) σ1 флюктуаций доплеровской частоты и параметры второй АКФ, вычисленной по второй оценке  траектории доплеровской частоты - время корреляции τ2, собственная частота f02 автокорреляционной функции и СКО σ2 флюктуаций доплеровской частоты, осуществляется анализ параметров АКФ, при выполнении условий
траектории доплеровской частоты - время корреляции τ2, собственная частота f02 автокорреляционной функции и СКО σ2 флюктуаций доплеровской частоты, осуществляется анализ параметров АКФ, при выполнении условий

принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


при предстартовом целеуказании о наведении ракеты на ведомого самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвм и вертикальной Δввм плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


при выполнении условий

принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведущим самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


при предстартовом целеуказании о наведении ракеты на ведомого самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвм и вертикальной Δввм плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Формирование в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма БПФ на каждом такте его работы двух отсчетов доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, что позволяет осуществить разрешение по скорости (доплеровской частоте) не разрешаемые по угловым координатам самолеты пары.
2. Идентификация оценок траекторий доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетом их пары на основе анализа параметров АКФ в соответствии с выражениями (5) и (10).
3. Формирование параметров рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (6) и (7) при предстартовом целеуказании о наведении ракеты на ведущего самолета их пары или в соответствии с выражениями (8) и (9) при предстартовом целеуказании о наведении ракеты на ведомого самолета их пары при выполнении условий (5).
4. Формирование параметров рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (11) и (12) при предстартовом целеуказании о наведении ракеты на ведущего самолета их пары или в соответствии с выражениями (13) и (14) при предстартовом целеуказании о наведении ракеты на ведомого самолета их пары при выполнении условий (10).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие в зависимости от предстартового целеуказания осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
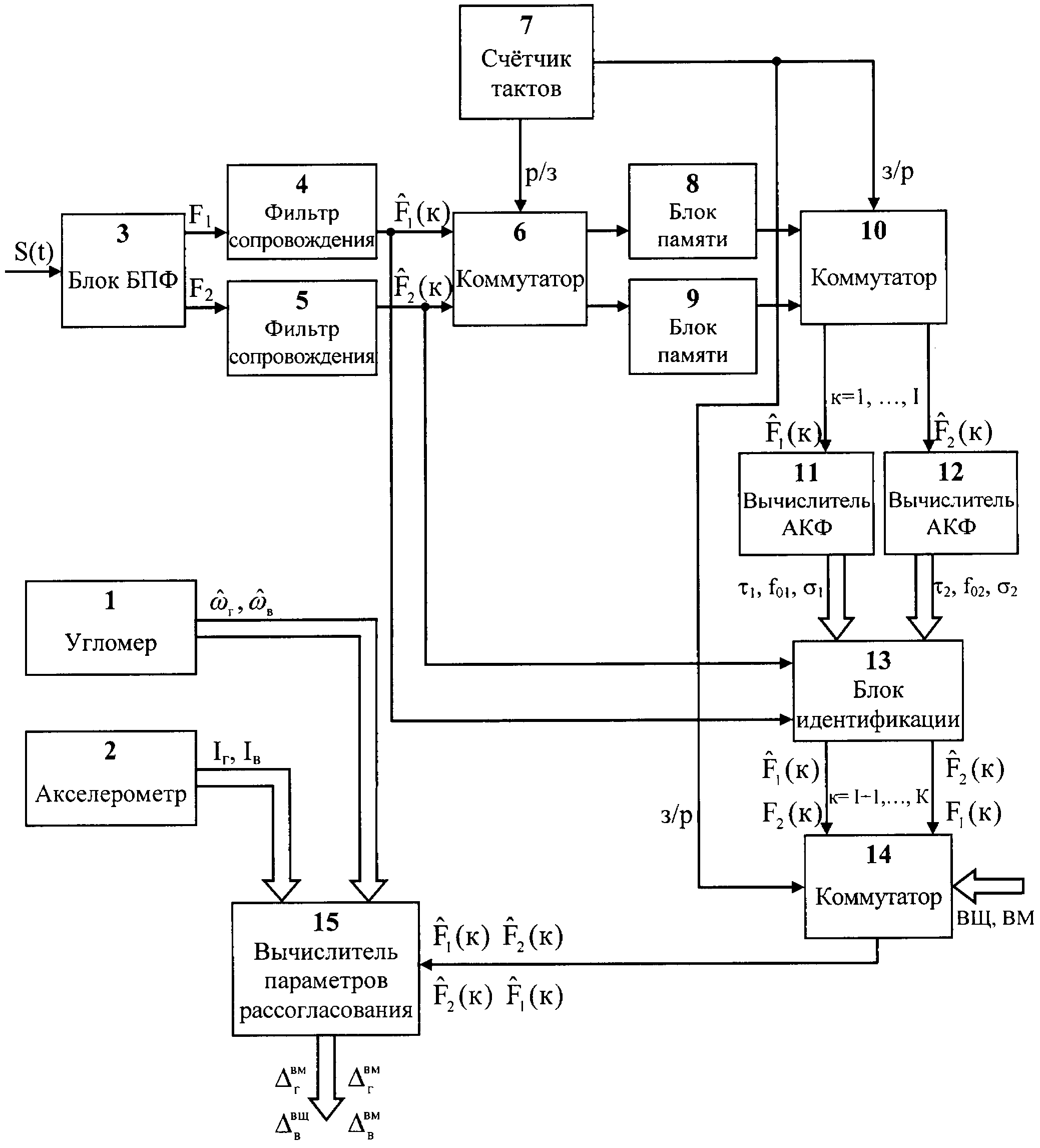
На чертеже приведена блок-схема, реализующая предлагаемый способ формирования параметров рассогласования в РЭСУ ракетой.
Предлагаемый способ реализуется следующим образом.
В угломере 1 РГС ракеты (чертеж) осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета - не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях.
плоскостях.
Одновременно с помощью акселерометра 2 осуществляется измерение собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, которые подаются на соответствующие входы вычислителя 15 параметров рассогласования.
Одновременно в автоселекторе скорости РГС ракеты радиолокационный сигнал S(t), отраженный от пары самолетов, находящихся в главном луче диаграммы направленности антенны РГС, поступает на вход блока 3 БПФ с эквивалентной полосой пропускания его одного бина, равного единицам герц (осуществляется узкополосная доплеровская фильтрация). На его выходе каждом к-ом такте работы (к=1,…,I,…,К) формируются два отсчета доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, не разрешаемой по угловым координатам в угломере РГС ракеты, которые поступают на входы соответствующих фильтров 4 и 5 сопровождения. На их выходах формируются две оценки  и
и  траекторий доплеровских частот, которые поступают на соответствующие входы первого коммутатора 6 куда поступает с выхода счетчика 7 тактов работы разрешающий сигнал (индекс «р») для подачи оценок
траекторий доплеровских частот, которые поступают на соответствующие входы первого коммутатора 6 куда поступает с выхода счетчика 7 тактов работы разрешающий сигнал (индекс «р») для подачи оценок  и
и  на входы соответствующих блоков 8 и 9 памяти для их запоминания. Кроме того, с выхода счетчика 7 тактов работы запрещающие сигналы (индекс «з») поступают на входы второго 10 и третьего 14 коммутаторов для запрета соответственно вычисления АКФ с ее параметрами и поступления в зависимости от предстартового целеуказания оценки траектории доплеровской частоты на соответствующий вход вычислителя 15 параметров рассогласвания.
на входы соответствующих блоков 8 и 9 памяти для их запоминания. Кроме того, с выхода счетчика 7 тактов работы запрещающие сигналы (индекс «з») поступают на входы второго 10 и третьего 14 коммутаторов для запрета соответственно вычисления АКФ с ее параметрами и поступления в зависимости от предстартового целеуказания оценки траектории доплеровской частоты на соответствующий вход вычислителя 15 параметров рассогласвания.
При достижении количества тактов работы блока 3 БПФ, равного I, с выхода счетчика 7 тактов работы на вход первого коммутатора 6 поступает запрещающий сигнал для запоминания полученных оценок  и
и  (к=1,…,I) в блоках 8 и 9 памяти и разрешающие сигналы для второго 10 и третьего 14 коммутаторов. В результате запомненные оценки
(к=1,…,I) в блоках 8 и 9 памяти и разрешающие сигналы для второго 10 и третьего 14 коммутаторов. В результате запомненные оценки  и
и  (к=1,…,I) в блоках 8 и 9 памяти поступают на входы соответствующих вычислителей 11 и 12 АКФ с определением их параметров - время корреляции τ1 и τ2, собственная частота f01 и f02 АКФ, СКО σ1 и σ2 флюктуаций доплеровской частоты.
(к=1,…,I) в блоках 8 и 9 памяти поступают на входы соответствующих вычислителей 11 и 12 АКФ с определением их параметров - время корреляции τ1 и τ2, собственная частота f01 и f02 АКФ, СКО σ1 и σ2 флюктуаций доплеровской частоты.
Вычисленные значения параметров АКФ с выходов вычислителей 11 и 12 АКФ поступают на вход блока 13 идентификации, куда также поступают оценки  и
и  траекторий доплеровских частот с выходов фильтров 4 и 5 сопровождения.
траекторий доплеровских частот с выходов фильтров 4 и 5 сопровождения.
В основу идентификации траектории доплеровской частоты, обусловленной скоростью сближения ракеты, либо с ведущим, либо с ведомым самолетом пары положен следующий принцип. Так, при полете в составе пары если летчик ведущего (впереди летящего) самолета осуществляет стационарный полет, то летчик ведомого (сзади летящего) самолета дополнительно путем периодического «подруливания» осуществляет выдерживание заданных параметров пары (интервал, дистанция) полета самолетов в целом. Такое различие в пилотировании самолетов в составе пары накладывает соответствующий «отпечаток» на траекторные статистические характеристики траекторий доплеровских частот, обусловленные скоростями сближения ракеты с ведущим и ведомым самолетами пары, разрешаемые путем узкополосной доплеровской фильтрации по доплеровской частоте (скорости), которые (характеристики) являются параметрами (время корреляции, собственная частота АКФ, СКО флюктуации доплеровской частот) соответствующих АКФ траекторий доплеровских частот.
В результате, если в блоке 13 идентификации выполняется условие (5), то принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары. Идентифицированные таким образом оценки
обусловлена скоростью сближения ракеты с ведомым самолетом пары. Идентифицированные таким образом оценки  и
и  поступают на соответствующие входы третьего коммутатора 14, куда поступает также целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
поступают на соответствующие входы третьего коммутатора 14, куда поступает также целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
Так, если при выполнении условий (5) введено предстартовое целеуказание о наведении ракеты на ведущего самолета из состава пары, то на выходе третьего коммутатора 14 будет сформирована оценка  , которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (6) и (7). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка
, которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (6) и (7). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка  и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (8) и (9).
и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (8) и (9).
Если в блоке 13 идентификации выполняется условие (10), то принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары. Идентифицированные таким образом оценки
обусловлена скоростью сближения ракеты с ведущим самолетом пары. Идентифицированные таким образом оценки  и
и  также поступают на соответствующие входы третьего коммутатора 14, куда поступает целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
также поступают на соответствующие входы третьего коммутатора 14, куда поступает целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
Так, если при выполнении условий (10) введено предстартовое целеуказание о наведении ракеты на ведущего самолета из состава пары, то на выходе третьего коммутатора 14 будет сформирована оценка  , которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (11) и (12). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка
, которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (11) и (12). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка  и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (13) и (15).
и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (13) и (15).
Таким образом, применение предлагаемого изобретения позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 30, формулы (7.51) (аналог).
2. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 24, формула (7.32) (прототип).
























Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа drfm
Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции
Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей
Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа drfm
Способ обеспечения электромагнитной совместимости импульсно-доплеровских бортовых радиолокационных станций группы истребителей
Способ функционирования комплексов средств автоматизации систем обработки информации и управления и устройство, его реализующее
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех
Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций группы истребителей при обеспечении их электромагнитной совместимости в условиях воздействия помех
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станций радиотехнической разведки и активных помех
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием воздействия помехи из вынесенной точки пространства при обнаружении воздушной цели, прикрываемой постановщиком помех
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности её работы на излучение
Способ панорамного обзора пространства оптико-электронной системой
Способ функционирования радиолокационной системы при измерении скорости полёта беспилотного летательного аппарата малого класса типа мультикоптер и дальности до него
Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием постановщиков помех типа drfm при обнаружении группы самолётов
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа drfm
Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта

