Результат интеллектуальной деятельности: Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта
Вид РИД
Изобретение
Изобретение относится к радиоэлектронным системам управления (РЭСУ) летательными аппаратами и может быть использовано для самонаведения ракеты класса «воздух-воздух» на вертолет при различном характере его полета с соответствующей ему динамикой.
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где
Кϕг, Кωг, Кϕв, Кωв - постоянные коэффициенты, значения которых выбираются таким образом, чтобы траектория наведения ракеты на вертолет была бы близка к прямолинейной;
 и
и  - оценки пеленгов вертолета в угломере радиолокационной головки самонаведения (РГС) соответственно в горизонтальной и вертикальной плоскостях;
- оценки пеленгов вертолета в угломере радиолокационной головки самонаведения (РГС) соответственно в горизонтальной и вертикальной плоскостях;
 и
и  - оценки угловых скоростей вращения линии визирования «ракета-вертолет» в угломере РГС соответственно в горизонтальной и вертикальной плоскостях [1].
- оценки угловых скоростей вращения линии визирования «ракета-вертолет» в угломере РГС соответственно в горизонтальной и вертикальной плоскостях [1].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на вертолет при его стационарном полете, полете с ускорением и полете с торможением с соответствующей динамикой при каждом характере полета вертолета.
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где
λ - рабочая длина волны РГС;
N - навигационная постоянная;
 - оценка доплеровской частоты, формируемая в автоселекторе скорости РГС и обусловленная скоростью сближения ракеты с вертолетом при его стационарном полете;
- оценка доплеровской частоты, формируемая в автоселекторе скорости РГС и обусловленная скоростью сближения ракеты с вертолетом при его стационарном полете;
Jг и Jв - собственные ускорения ракеты соответственно в горизонтальной и вертикальной плоскостях, измеряемые акселерометром ракеты [2].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на вертолет при полете его с ускорением, полете с торможением и полете в режиме «висение» с соответствующей динамикой при каждом характере полета вертолета.
Цель изобретения - формирование параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух», позволяющих осуществить самонаведение ракеты на вертолет при различном характере его полета (стационарном полете, полете с ускорением, полете с торможением и полете в режиме «висение»).
Для достижения цели в способе формирования параметров рассогласования в РЭСУ ракетой класса «воздух-воздух» при ее самонаведении на вертолет при различном характере его полета, заключающимся в том, что в угломере РГС ракеты осуществляется оценка угловой скорости вращения линии визирования «ракета-вертолет»  и
и  , оценка пеленгов
, оценка пеленгов  и
и  вертолета, определяются приращения Δωг и Δωв угловой скорости вращения линии визирования «ракета-вертолет», обусловленные маневром вертолета соответственно в горизонтальной и вертикальной плоскостях, в измерении с помощью акселерометра собственных ускорений ракеты в горизонтальной Jг и вертикальной Jв плоскостях, дополнительно в автоселекторе скорости РГС ракеты параллельно в каждом оптимальном калмановском фильтре ОФmj их матрицы в соответствии с выражениями
вертолета, определяются приращения Δωг и Δωв угловой скорости вращения линии визирования «ракета-вертолет», обусловленные маневром вертолета соответственно в горизонтальной и вертикальной плоскостях, в измерении с помощью акселерометра собственных ускорений ракеты в горизонтальной Jг и вертикальной Jв плоскостях, дополнительно в автоселекторе скорости РГС ракеты параллельно в каждом оптимальном калмановском фильтре ОФmj их матрицы в соответствии с выражениями






где
k - номер такта работы калмановского фильтра;
P-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
K(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 и
и  - вектор текущих и экстраполированных оценок дальности до вертолета и доплеровской частоты, обусловленной скоростью сближения вертолета с ракетой;
- вектор текущих и экстраполированных оценок дальности до вертолета и доплеровской частоты, обусловленной скоростью сближения вертолета с ракетой;
Н(k) - матрица наблюдения;
Y(k) - вектор наблюдения;
Z(k+1) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
"-1" - операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы;
m=1, 2, 3, 4;
m=1 соответствует стационарному характеру полета вертолета;
m=2 соответствует полету вертолета с ускорением;
m=3 соответствует полету вертолета с торможением;
m=4 соответствует полету вертолета в режиме «висение»;
 ; L - количество вариантов динамики полета вертолета при каждом его m-м характере полета,
; L - количество вариантов динамики полета вертолета при каждом его m-м характере полета,
осуществляется сопровождение вертолета по дальности и доплеровской частоте при различных априорных данных, принятых при фильтрации в каждом OФmj относительно m-го характера полета вертолета и соответствующего для каждого j-гo варианта динамики его полета, при этом, по строкам матрицы оптимальных фильтров располагаются фильтры, в которых в качестве априорных сведений приняты динамические модели для различных гипотез относительно m-го характера полета вертолета, а по столбцам - фильтры с динамическими моделями для различных гипотез относительно j-x вариантов динамики полета вертолета при соответствующем его m-м характере полета, для каждого оптимального фильтра их матрицы производится вычисление соответствующих значений случайных величин  в соответствии с выражением
в соответствии с выражением

осуществляется сравнение полученных значений случайных величин  с соответствующими ее граничными значениями χ2гр m(m,Рош), одинаковыми для всех оптимальных фильтров, находящихся в m-й строке их матрицы,
с соответствующими ее граничными значениями χ2гр m(m,Рош), одинаковыми для всех оптимальных фильтров, находящихся в m-й строке их матрицы,

где
Рош - вероятность ошибки того, что правильная гипотеза относительно m-го характера полета вертолета будет отвергнута,
определяется максимальный номер строки матрицы оптимальных фильтров, где находится один и более оптимальных фильтров, для которых выполняется условие (12), что соответствует оценке  характера полета вертолета, для тех оптимальных фильтров
характера полета вертолета, для тех оптимальных фильтров  , для которых в
, для которых в  строке их матрицы выполняется условие (12), производится вычисление соответствующих значений обобщенных дисперсий реальных ошибок фильтрации в соответствии с выражением
строке их матрицы выполняется условие (12), производится вычисление соответствующих значений обобщенных дисперсий реальных ошибок фильтрации в соответствии с выражением

определяется номер столбца  в строке
в строке  , где находится оптимальный фильтр, для которого величина
, где находится оптимальный фильтр, для которого величина  минимальна, что соответствует оценке
минимальна, что соответствует оценке  варианта динамики полета вертолета для оцененного значения
варианта динамики полета вертолета для оцененного значения  характера его полета, на основе значений
характера его полета, на основе значений  и
и  осуществляется выбор оценки доплеровской частоты, обусловленной скоростью сближения вертолета с ракетой, с выхода только одного
осуществляется выбор оценки доплеровской частоты, обусловленной скоростью сближения вертолета с ракетой, с выхода только одного  из их матрицы, находящегося на пересечении оцененных номера строки
из их матрицы, находящегося на пересечении оцененных номера строки  и столбца
и столбца  , при принятии решения
, при принятии решения  , что соответствует стационарному полету вертолета, параметры рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях будут формироваться в соответствии с выражениями
, что соответствует стационарному полету вертолета, параметры рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях будут формироваться в соответствии с выражениями


где
 - оценка доплеровской частоты с выхода одного из оптимальных фильтров, находящихся в первой строке их матрицы и обусловленная скоростью сближения ракеты с вертолетом при оцененном
- оценка доплеровской частоты с выхода одного из оптимальных фильтров, находящихся в первой строке их матрицы и обусловленная скоростью сближения ракеты с вертолетом при оцененном  варианте динамики его стационарного полета,
варианте динамики его стационарного полета,
при принятии решения  что соответствует полету вертолета с ускорением, параметры рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях будут формироваться в соответствии с выражениями
что соответствует полету вертолета с ускорением, параметры рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях будут формироваться в соответствии с выражениями


где
 - оценка доплеровской частоты с выхода одного из оптимальных фильтров, находящихся во второй строке их матрицы и обусловленная скоростью сближения ракеты с вертолетом при оцененном
- оценка доплеровской частоты с выхода одного из оптимальных фильтров, находящихся во второй строке их матрицы и обусловленная скоростью сближения ракеты с вертолетом при оцененном  варианте динамики его полета с ускорением,
варианте динамики его полета с ускорением,
при принятии решения  что соответствует полету вертолета с торможением, параметры рассогласования в РЭСУ ракетой в горизонтальной Δг3 и вертикальной Δв3 плоскостях будут формироваться в соответствии с выражениями
что соответствует полету вертолета с торможением, параметры рассогласования в РЭСУ ракетой в горизонтальной Δг3 и вертикальной Δв3 плоскостях будут формироваться в соответствии с выражениями


где
 - оценка доплеровской частоты с выхода одного из оптимальных фильтров, находящихся в третьей строке их матрицы и обусловленная скоростью сближения ракеты с вертолетом при оцененном
- оценка доплеровской частоты с выхода одного из оптимальных фильтров, находящихся в третьей строке их матрицы и обусловленная скоростью сближения ракеты с вертолетом при оцененном  варианте динамики его полета с торможением,
варианте динамики его полета с торможением,
при принятии решения  что соответствует полету вертолета в режиме «висение», параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг4 и вертикальной Δв4 плоскостях будут формироваться в соответствии с выражениями (1) и (2).
что соответствует полету вертолета в режиме «висение», параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг4 и вертикальной Δв4 плоскостях будут формироваться в соответствии с выражениями (1) и (2).
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Параллельное сопровождение вертолета по дальности и доплеровской частоте в автоселекторе скорости РГС ракеты в каждом оптимальном калмановском фильтре OФmj их матрицы в соответствии с выражениями (5)-(10) при различных априорных данных, принятых при фильтрации в каждом OФmj относительно m-го характера полета вертолета и соответствующего для каждого j-гo варианта динамики его полета.
2. Оценка по критерию хи-квадрат Пирсона m-го характера полета вертолета в соответствии с выражениями (11) и (12).
3. Оценка по критерию минимума обобщенной дисперсии реальных j-го варианта динамики полета вертолета при соответствующем m-м характере его полета в соответствии с выражением (13).
4. Формирование параметров рассогласования в РЭСУ ракеты в соответствии с выражениями (14) и (15) при принятии решения о стационарном полете вертолета 
5. Формирование параметров рассогласования в РЭСУ ракеты в соответствии с выражениями (16) и (17) при принятии решения о полете вертолета с ускорением 
6. Формирование параметров рассогласования в РЭСУ ракеты в соответствии с выражениями (18) и (19) при принятии решения о полете вертолета с торможением 
7. Формирование параметров рассогласования в РЭСУ ракеты в соответствии с выражениями (1) и (2) при принятии решения о полете вертолета в режиме «висение» 
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков в совокупности с известными позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие в зависимости от характера полета вертолета осуществить на него самонаведение ракеты класса «воздух-воздух».
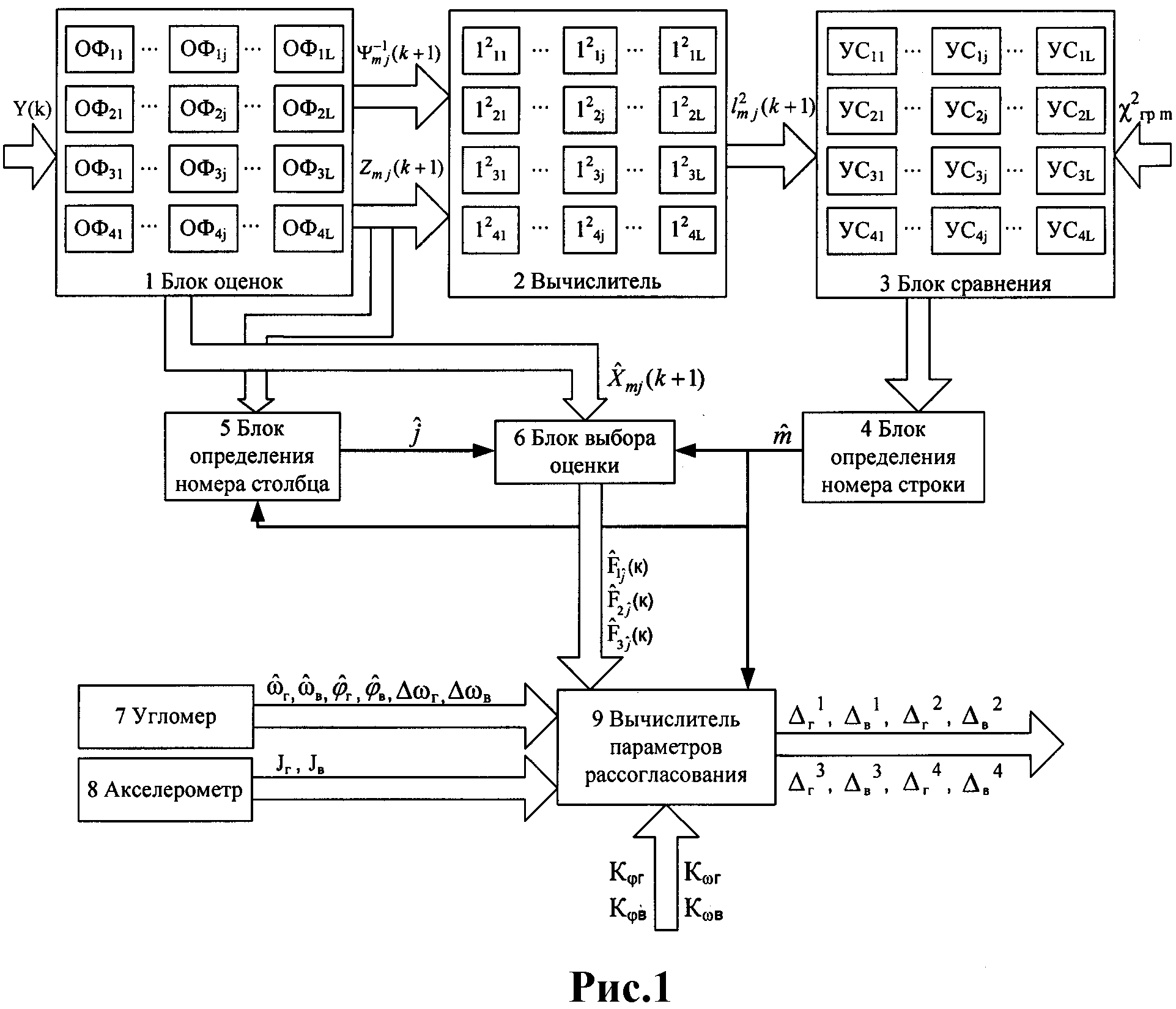
На рисунке 1 приведена блок-схема, реализующая предлагаемый способ формирования параметров рассогласования в РЭСУ ракетой.
Предлагаемый способ реализуется следующим образом.
На вход блока 1 оценок на каждом k такте поступают отсчеты сопровождаемых координат полета вертолета, обусловленные m-м (m=1, 2, 3, 4) характером его полета с соответствующим j-м  вариантом динамики при каждом характере полета, т.е. формируется вектор наблюдения Y(k) в выражении (8) при m-м характере полета вертолета с j-м вариантом его динамики полета.
вариантом динамики при каждом характере полета, т.е. формируется вектор наблюдения Y(k) в выражении (8) при m-м характере полета вертолета с j-м вариантом его динамики полета.
Блок 1 оценок представляет собой матрицу оптимальных фильтров, в каждом из которых ОФmj (m=1, 2, 3, 4;  ) реализована в соответствии с выражениями (5)-(10) процедура оптимальной многомерной линейной дискретной калмановской фильтрации. Для осуществления параллельной фильтрации наблюдаемых отсчетов дальности до вертолета, доплеровской частоты, обусловленной скоростью сближения вертолета с ракетой, соответствующие входы оптимальных фильтров объединены. Фильтрация оцениваемых координат полета вертолета в каждом ОФmj их матрицы осуществляется при различных априорных данных, принятых при фильтрации в соответствующем оптимальном фильтре относительно m-го характера полета вертолета и j-м варианте динамики его полета. При этом по строкам матрицы оптимальных фильтров располагаются фильтры, в которых в качестве априорных сведений приняты динамические модели относительно m-го характера полета вертолета, а по столбцам - фильтры с динамическими моделями относительно j-x вариантов динамики при соответствующем m-м характере полета вертолета. Динамические модели, принятые при фильтрации в каждом OФmj их матрицы (m=1, 2, 3, 4;
) реализована в соответствии с выражениями (5)-(10) процедура оптимальной многомерной линейной дискретной калмановской фильтрации. Для осуществления параллельной фильтрации наблюдаемых отсчетов дальности до вертолета, доплеровской частоты, обусловленной скоростью сближения вертолета с ракетой, соответствующие входы оптимальных фильтров объединены. Фильтрация оцениваемых координат полета вертолета в каждом ОФmj их матрицы осуществляется при различных априорных данных, принятых при фильтрации в соответствующем оптимальном фильтре относительно m-го характера полета вертолета и j-м варианте динамики его полета. При этом по строкам матрицы оптимальных фильтров располагаются фильтры, в которых в качестве априорных сведений приняты динамические модели относительно m-го характера полета вертолета, а по столбцам - фильтры с динамическими моделями относительно j-x вариантов динамики при соответствующем m-м характере полета вертолета. Динамические модели, принятые при фильтрации в каждом OФmj их матрицы (m=1, 2, 3, 4;  ) в виде различных структур матриц Фmj(k) и Qmj(k+1) с соответствующими численными значениями их элементов, выполняют роль динамического эталона, поскольку они одновременно являются априорными сведениями не только для сопровождения вертолета, но и для распознавания характера его полета.
) в виде различных структур матриц Фmj(k) и Qmj(k+1) с соответствующими численными значениями их элементов, выполняют роль динамического эталона, поскольку они одновременно являются априорными сведениями не только для сопровождения вертолета, но и для распознавания характера его полета.
В предлагаемом способе определение m-го характера полета вертолета осуществляется по критерию хи-квадрат Пирсона, согласно которого для каждого OФmj их матрицы в вычислителе 2 случайных значений величин  на основе значений элементов матрицы невязок измерения Zm j(k+1) (выражение (8) и матрицы априорных ошибок фильтрации Ψmj(k+1) (выражение (6), поступающих с блока 1 оценок, производится вычисление соответствующих значений случайных величин
на основе значений элементов матрицы невязок измерения Zm j(k+1) (выражение (8) и матрицы априорных ошибок фильтрации Ψmj(k+1) (выражение (6), поступающих с блока 1 оценок, производится вычисление соответствующих значений случайных величин  в соответствии с выражением (11). В блоке 3 сравнения в соответствующем для каждого OФmj устройстве сравнения УСmj осуществляется сравнение (выражение (12) полученных значений случайных величин
в соответствии с выражением (11). В блоке 3 сравнения в соответствующем для каждого OФmj устройстве сравнения УСmj осуществляется сравнение (выражение (12) полученных значений случайных величин  с соответствующими их граничными значениями χ2гр m(m,Рош), одинаковыми для всех оптимальных фильтров, находящихся в m-й строке их матрицы. По результатам сравнения в блоке 4 определения номера строки находится максимальный номер строки матрицы оптимальных фильтров, где расположен один и более
с соответствующими их граничными значениями χ2гр m(m,Рош), одинаковыми для всех оптимальных фильтров, находящихся в m-й строке их матрицы. По результатам сравнения в блоке 4 определения номера строки находится максимальный номер строки матрицы оптимальных фильтров, где расположен один и более  , для которых выполняется условие (12), что соответствует оценке
, для которых выполняется условие (12), что соответствует оценке  характера полета вертолета.
характера полета вертолета.
Условие (12) может быть выполнено одновременно в нескольких оптимальных фильтрах в  строке матрицы при j-ых вариантах динамики полета вертолета. В предлагаемом способе определение j-го варианта динамики полета вертолета при оцененном
строке матрицы при j-ых вариантах динамики полета вертолета. В предлагаемом способе определение j-го варианта динамики полета вертолета при оцененном  характере полета вертолета осуществляется по критерию минимума обобщенной дисперсии реальных ошибок фильтрации следующим образом. Для тех оптимальных фильтров, находящихся в оцененном
характере полета вертолета осуществляется по критерию минимума обобщенной дисперсии реальных ошибок фильтрации следующим образом. Для тех оптимальных фильтров, находящихся в оцененном  номере строки их матрицы и для которых выполняется условие (12), в блоке 5 определения номера столбца производится вычисление соответствующих значений обобщенных дисперсий реальных ошибок фильтрации в соответствии с выражением (13) и определяется номер столбца
номере строки их матрицы и для которых выполняется условие (12), в блоке 5 определения номера столбца производится вычисление соответствующих значений обобщенных дисперсий реальных ошибок фильтрации в соответствии с выражением (13) и определяется номер столбца  в строке
в строке  , где находится оптимальный фильтр, для которого величина
, где находится оптимальный фильтр, для которого величина  минимальна, что и будет соответствовать оценке
минимальна, что и будет соответствовать оценке  варианта динамики полета вертолета при оцененном
варианта динамики полета вертолета при оцененном  характере его полета. На основе значений
характере его полета. На основе значений  и
и  в блоке 6 выбора оценки, куда поступают оценки
в блоке 6 выбора оценки, куда поступают оценки  (m=1, 2, 3, 4;
(m=1, 2, 3, 4;  ) с выходов всех оптимальных фильтров, осуществляется выбор оценок доплеровских частот
) с выходов всех оптимальных фильтров, осуществляется выбор оценок доплеровских частот  ,
,  и
и  , обусловленных скоростью сближения ракеты соответственно при стационарном полете вертолета (при
, обусловленных скоростью сближения ракеты соответственно при стационарном полете вертолета (при  ), полету вертолета с ускорением (при
), полету вертолета с ускорением (при  ) и торможением
) и торможением  с соответствующей j-й динамикой, которые поступают на вход вычислителя 9 параметров рассогласования.
с соответствующей j-й динамикой, которые поступают на вход вычислителя 9 параметров рассогласования.
Одновременно в угломере 7 РГС ракеты осуществляется оценка угловых скоростей вращения линии визирования «ракета - вертолет»  и
и  , приращений Δωг и Δωв угловых скоростей вращения линии визирования «ракета-вертолет», обусловленные маневром вертолета, оценки пеленгов
, приращений Δωг и Δωв угловых скоростей вращения линии визирования «ракета-вертолет», обусловленные маневром вертолета, оценки пеленгов  и
и  вертолета соответственно в горизонтальной (индекс «г») и вертикальной (индекс «в») плоскостях, которые поступают на вход вычислителя 9 параметров рассогласования.
вертолета соответственно в горизонтальной (индекс «г») и вертикальной (индекс «в») плоскостях, которые поступают на вход вычислителя 9 параметров рассогласования.
Кроме того, в акселерометре 8 осуществляется измерение собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, которые также поступают на соответствующие входы вычислителя 9 параметров рассогласования.
При принятии в блоке 4 решения  , что соответствует стационарному полету вертолета, параметры рассогласования в вычислителе 9 в горизонтальной Δг1 и вертикальной Δв1 плоскостях будут формироваться в соответствии с выражениями (14) и (15).
, что соответствует стационарному полету вертолета, параметры рассогласования в вычислителе 9 в горизонтальной Δг1 и вертикальной Δв1 плоскостях будут формироваться в соответствии с выражениями (14) и (15).
При принятии в блоке 4 решения  что соответствует полету вертолета с ускорением, параметры рассогласования в вычислителе 9 в горизонтальной Δг2 и вертикальной Δв2 плоскостях будут формироваться в соответствии с выражениями (16) и (17).
что соответствует полету вертолета с ускорением, параметры рассогласования в вычислителе 9 в горизонтальной Δг2 и вертикальной Δв2 плоскостях будут формироваться в соответствии с выражениями (16) и (17).
При принятии в блоке 4 решения  что соответствует полету вертолета с торможением, параметры рассогласования в вычислителе 9 в горизонтальной Δг3 и вертикальной Δв3 плоскостях будут формироваться в соответствии с выражениями (18) и (19).
что соответствует полету вертолета с торможением, параметры рассогласования в вычислителе 9 в горизонтальной Δг3 и вертикальной Δв3 плоскостях будут формироваться в соответствии с выражениями (18) и (19).
При принятии в блоке 4 решения  что соответствует полету вертолета в режиме «висение», параметры рассогласования в вычислителе 9, куда также поступают постоянные значения коэффициентов Кϕг, Кωг, Кϕв, Кωв, которые выбираются таким образом, чтобы траектория наведения ракеты на вертолет была бы близка к прямолинейной, в горизонтальной Δг4 и вертикальной Δв4 плоскостях будут формироваться в соответствии с выражениями (1) и (2).
что соответствует полету вертолета в режиме «висение», параметры рассогласования в вычислителе 9, куда также поступают постоянные значения коэффициентов Кϕг, Кωг, Кϕв, Кωв, которые выбираются таким образом, чтобы траектория наведения ракеты на вертолет была бы близка к прямолинейной, в горизонтальной Δг4 и вертикальной Δв4 плоскостях будут формироваться в соответствии с выражениями (1) и (2).
Таким образом, применение предлагаемого изобретения позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие осуществить самонаведение ракеты на вертолет при различном характере его полета с соответствующей ему динамикой полета.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 30, формулы (7.51) (аналог).
2. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 24, формула (7.32) (прототип).




























Способ получения радиотехнической информации и радиотехнический комплекс для его осуществления
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящей по скорости помехи
Способ формирования сигнала управления истребителем в горизонтальной плоскости при его ближнем наведении на групповую воздушную цель
Способ однозначного измерения дальности до метеорологического объекта
Способ прогноза параметров газовых залежей
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки
Способ измерения скорости полёта воздушного объекта и рлс для его осуществления
Способ распознавания направления самонаведения пущенной по группе самолётов ракеты с радиолокационной головкой самонаведения
Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех
Способ получения радиотехнической информации и радиотехнический комплекс для его осуществления
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящей по скорости помехи
Способ формирования сигнала управления истребителем в горизонтальной плоскости при его ближнем наведении на групповую воздушную цель
Способ однозначного измерения дальности до метеорологического объекта
Способ прогноза параметров газовых залежей
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки
Способ измерения скорости полёта воздушного объекта и рлс для его осуществления
Способ распознавания направления самонаведения пущенной по группе самолётов ракеты с радиолокационной головкой самонаведения
Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех
Фонарь кабины пилота многофункционального истребителя

