Результат интеллектуальной деятельности: Способ панорамного обзора пространства оптико-электронной системой
Вид РИД
Изобретение
Изобретение относится к области оптико-электронных систем (ОЭС) и может быть использовано для панорамного обзора пространства при наблюдении с высоким угловым разрешением объектов, характеризующихся значительной линейной протяженностью, типа взлетно-посадочные полосы, автомобильные трассы, участки границ и т.д.
Известен способ обзора пространства ОЭС, заключающийся в просмотре протяженного по углу изображения путем механического сканирования одного приемника излучения [1].
Недостатком такого способа обзора пространства ОЭС являются существенные временные затраты при обзоре пространства и постоянство углового разрешения в азимутальной плоскости.
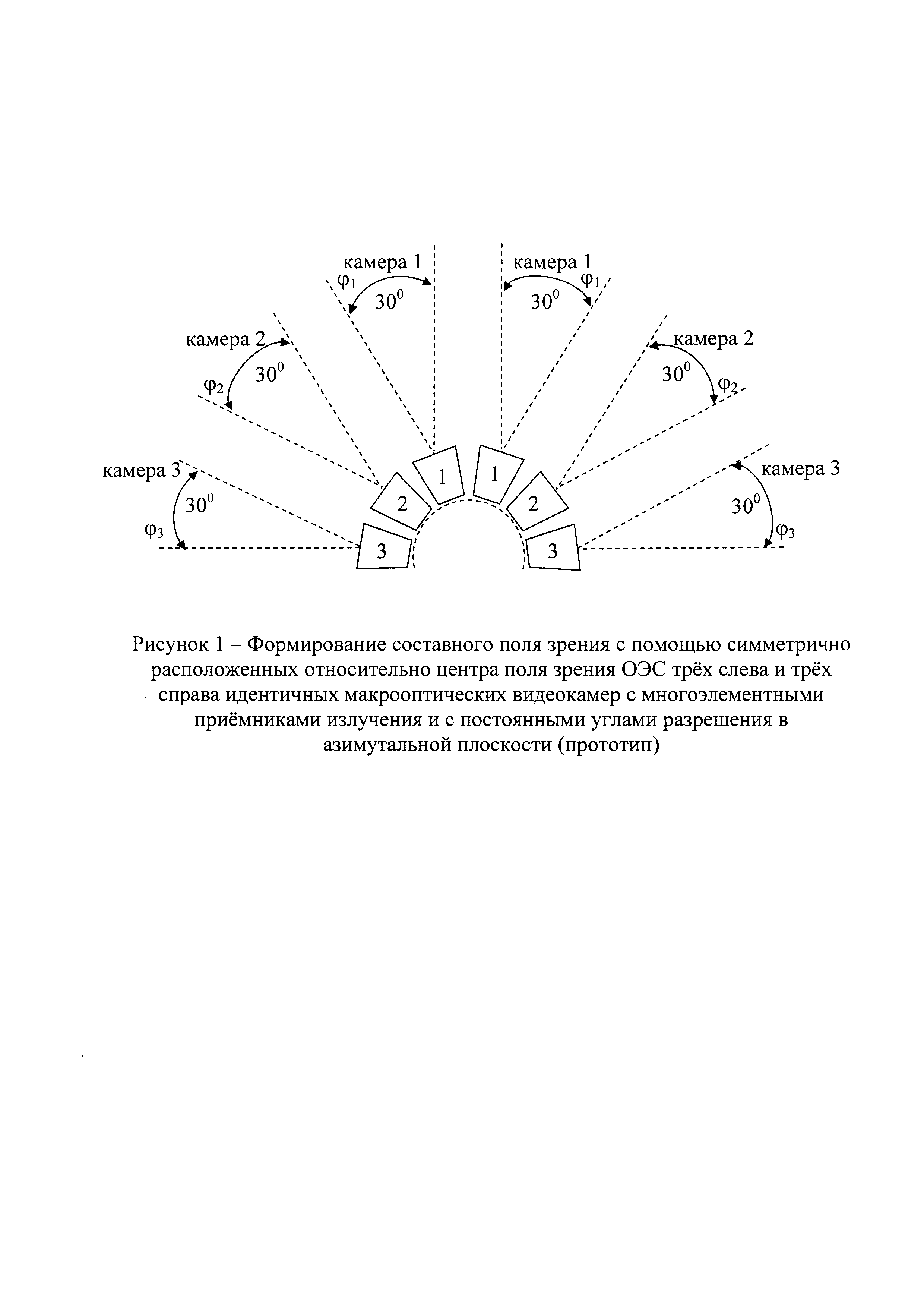
Известен способ панорамного обзора пространства ОЭС, заключающийся в формировании составного поля зрения с помощью симметрично расположенных относительно центра поля зрения оптико-электронной системы трех слева и трех справа идентичных макрооптических видеокамер с многоэлементными приемниками излучения с постоянными углами разрешения в азимутальной плоскости (рисунок 1) [2].
Недостатком данного панорамного способа обзора пространства ОЭС является то, что постоянство углового разрешения в азимутальной плоскости приводит при наблюдении линейно-протяженных объектов к избыточности пространственного разрешения в центре и к недостатку разрешения на краях зоны обзора, поскольку дальность до краев зоны в несколько раз превышает дальность до центра. Так, например, при наблюдении взлетно-посадочной полосы ОЭС, находящейся в контрольной точке аэродрома, дальность до торцов полосы превышает дальность до центра полосы в 5-7 раз. Это существенно затрудняет формирование единого панорамного изображения и дешифрирование его оператором.
Цель изобретения - формирование панорамы с монотонным и безразрывным изменением масштаба изображения по всему полю зрения оптико-электронной системы, характеризующейся повышенным угловым разрешением на краях зоны обзора пространства и пониженным разрешением в центре зоны обзора пространства.
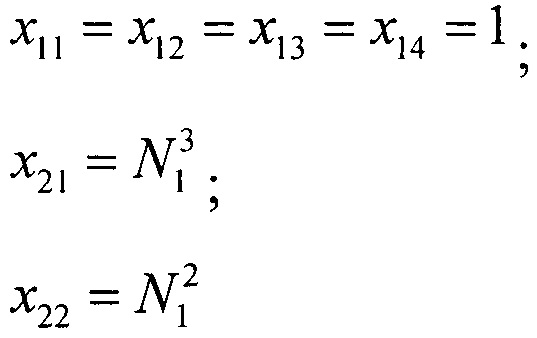
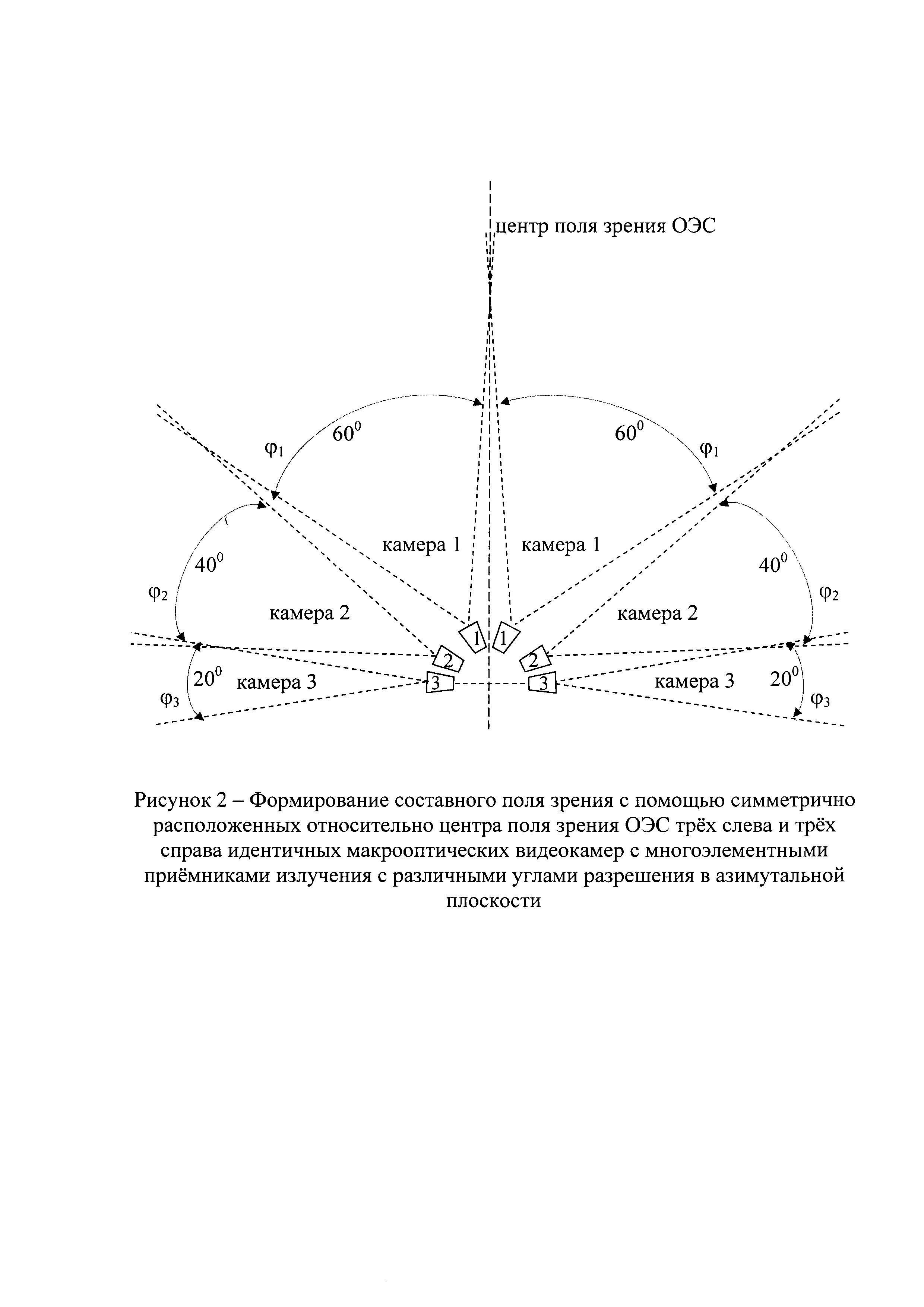
Для достижения цели в способе панорамного обзора пространства оптико-электронной системой, заключающимся в формировании составного поля зрения с помощью симметрично расположенных относительно центра поля зрения оптико-электронной системы трех слева и трех справа идентичных макрооптических видеокамер с многоэлементными приемниками излучения, дополнительно учитывается, что видеокамеры имеют различные увеличения, причем, максимальное увеличение имеют видеокамеры, ориентированные на удаленные участки зоны обзора пространства, а минимальное -видеокамеры, ориентированные на центр зоны обзора пространства, устранение различий масштабов изображения на стыках смежных видеокамер осуществляется координатно зависимым цифровым масштабированием, выравнивающим увеличение изображения вдоль линии сшивки для трех видеокамер, расположенных слева и трех видеокамер, расположенных справа относительно центра поля зрения оптико-электронной системы, для чего изменение масштаба видеокамер, расположенных слева и справа, задается 4 точками кубической параболы вида

где
коэффициенты Sj определяются при решении системы линейных уравнений, имеющей в матричной форме вид X*S=Y;
 - номер точки параболы;
- номер точки параболы;
координаты 4 точек параболы для видеокамер, расположенных слева и справа, задаются в виде
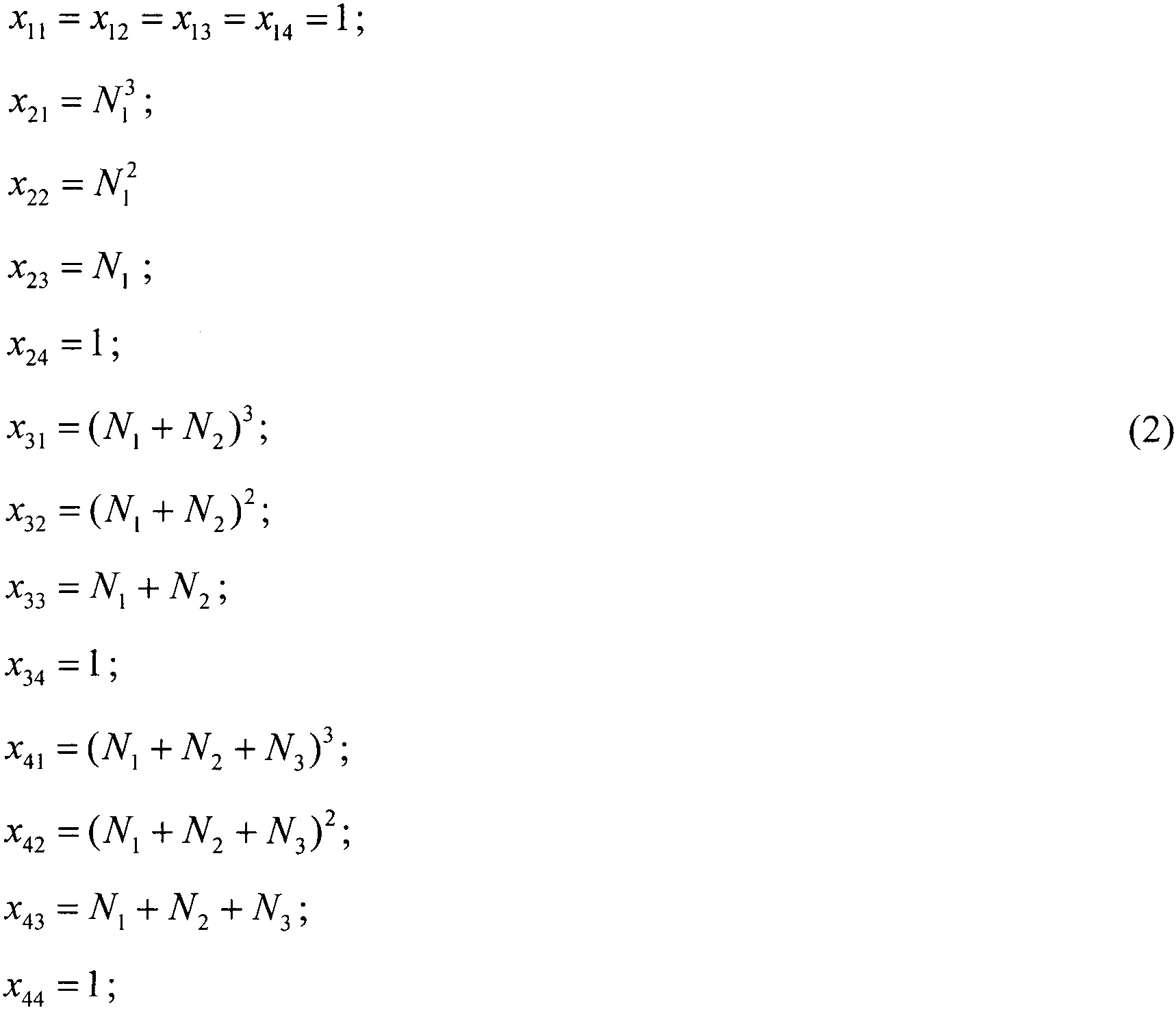
Ni - количество пикселей в i-ом, , сегментированном изображении;
, сегментированном изображении;
отношение углов поля зрения видеокамер задается в виде

ϕ1, ϕ2 и ϕ3 - угол поля зрения соответственно первой, второй и третьей видеокамер, расположенных симметрично слева и справа относительно центра поля зрения оптико-электронной системы,
вычисляют значения кривой в соответствии с выражением

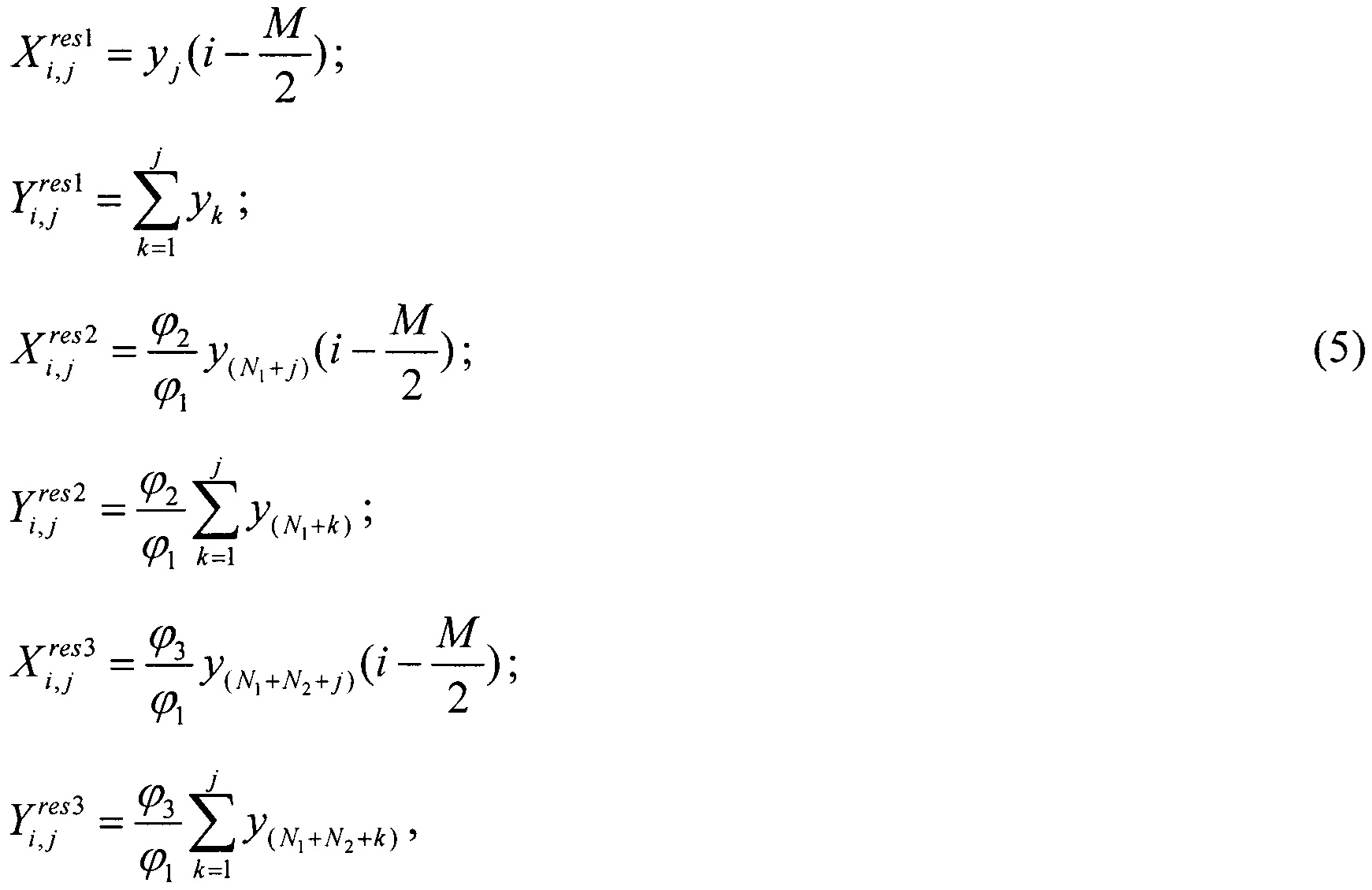
вычисляют координаты пикселей трансформированного изображения, которым соответствуют пиксели исходного изображения с координатами i, j в соответствии с выражениями
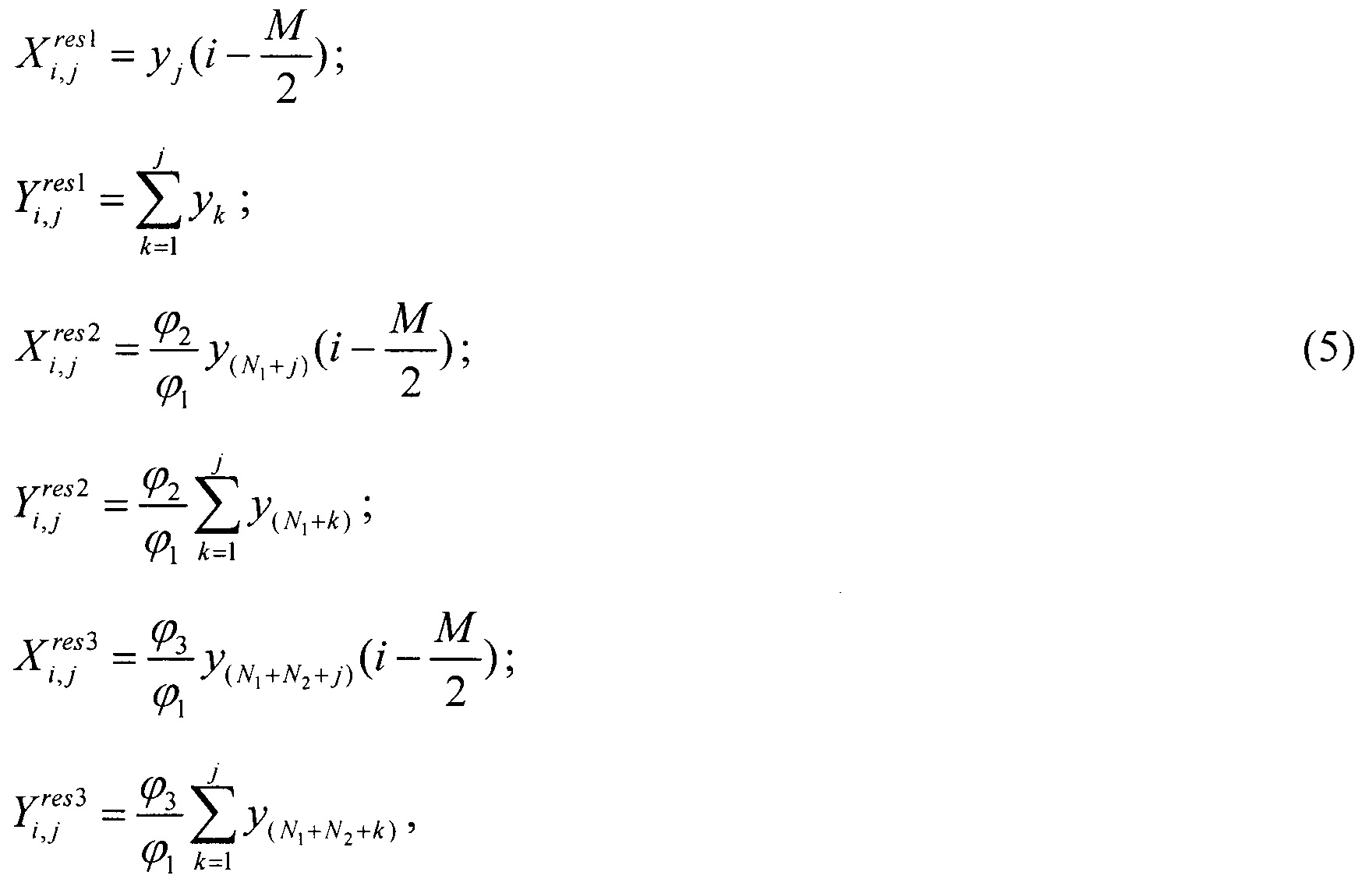
где
res1, res2 и res3 - индексы, характеризующие отнесение переменной к результирующим изображениям первой, второй и третьей камеры соответственно;
М - количество элементов приемника излучения по вертикали, вычисляют размеры результирующих изображений для панорамы как


где
 - номер видеокамеры. Новыми признаками, обладающими существенными отличиями, являются следующие.
- номер видеокамеры. Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Видеокамеры, расположенные по три слева и справа относительно центра поля зрения оптико-электронной системы, имеют различные увеличения, причем максимальное увеличение имеют видеокамеры, ориентированные на удаленные участки зоны обзора, а минимальное - видеокамеры, ориентированные на центр зоны обзора
2. Устранение различий масштабов изображения на стыках смежных видеокамер осуществляется координатно зависимым цифровым масштабированием, выравнивающим увеличение изображения вдоль линии сшивки для трех видеокамер, расположенных слева и трех видеокамер, расположенных справа относительно центра поля зрения оптико-электронной системы, для чего изменение масштаба видеокамер, расположенных слева и справа, задается 4 точками кубической параболы вида (1) с учетом выражений (2) и (3).
3. Вычисление значений уi кривой в соответствии с выражением (4).
4. Вычисление координат пикселей трансформированного изображения, которым соответствуют пиксели исходного изображения с координатами i, j в соответствии с выражениями (5).
5. Вычисление размеров результирующих изображений для панорамы в соответствии с выражениями (6) и (7).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков позволит сформировать панораму с монотонным и безразрывным изменением масштаба изображения по всему полю, характеризующейся повышенным угловым разрешением на краях и пониженным разрешением в центре. Подобная панорама обеспечивает возможность существенного выравнивания величины пространственного разрешения на всех участках линейно-протяженного объекта наблюдения, что в свою очередь позволяет с высокой эффективностью наблюдать протяженный объект, как в ближней, так и в дальней зоне.
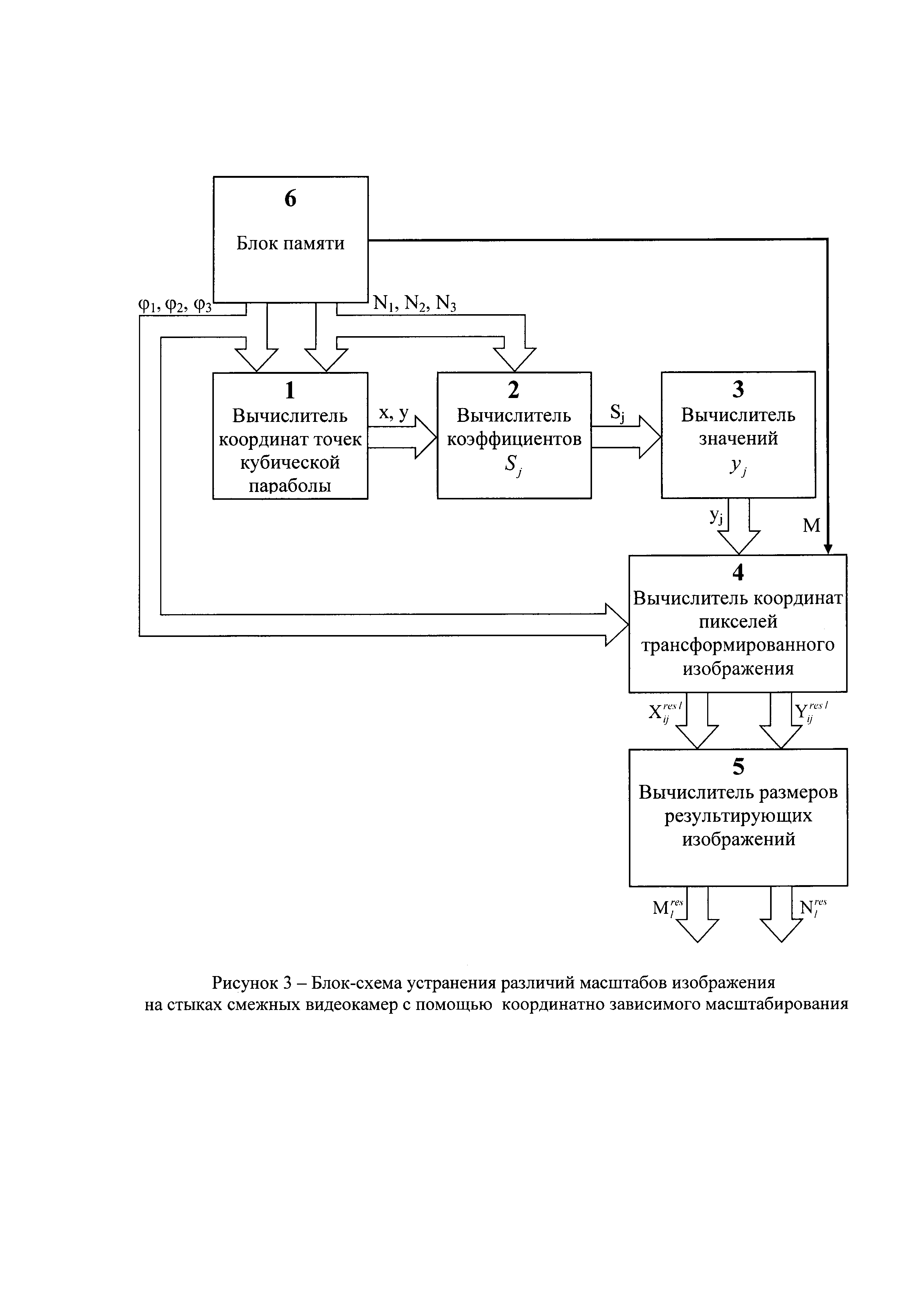
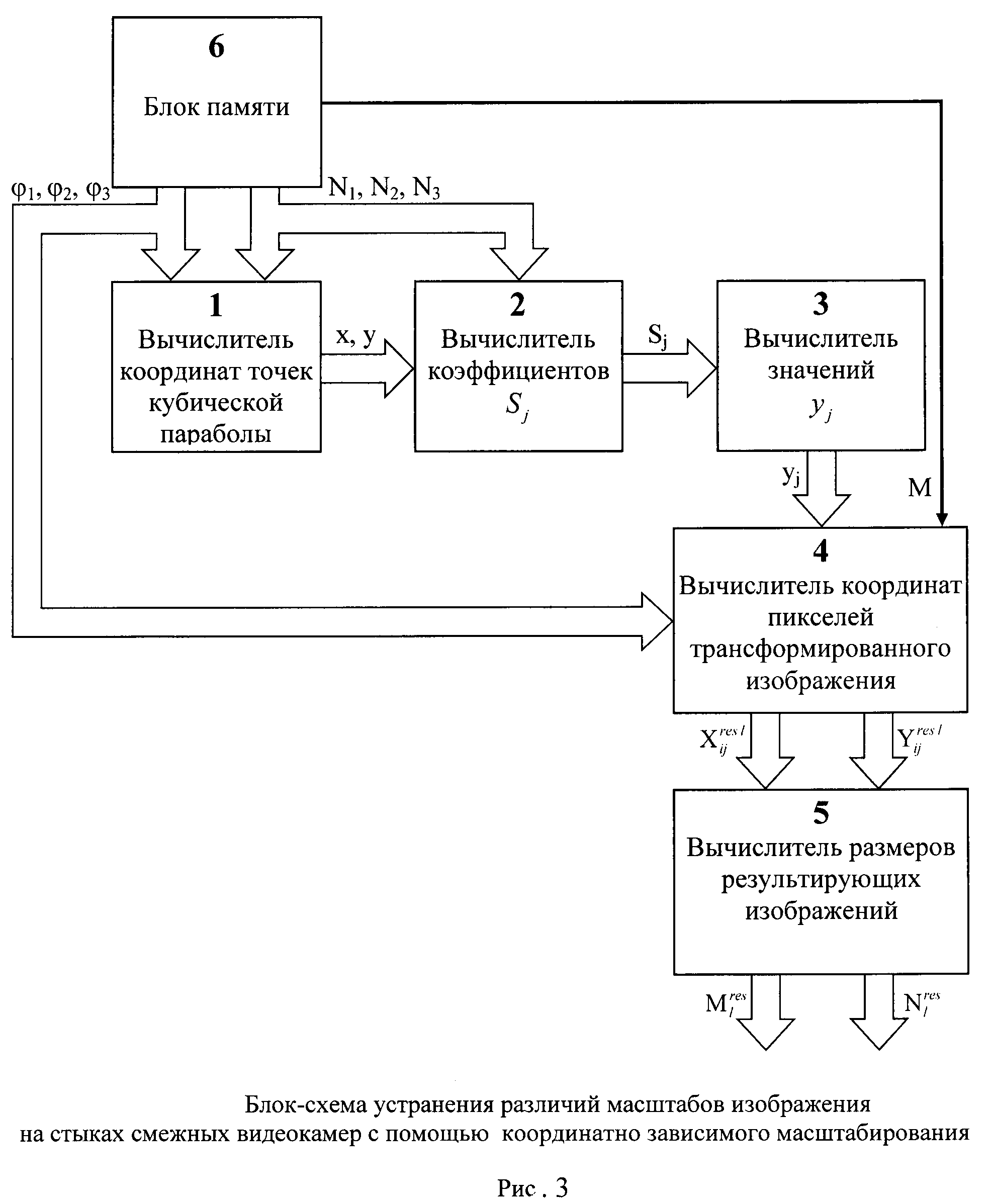
На рисунке 1 приведено формирование составного поля зрения с помощью симметрично расположенных относительно центра поля зрения ОЭС трех слева и трех справа идентичных макрооптических видеокамер с многоэлементными приемниками излучения и с постоянными углами разрешения в азимутальной плоскости (прототип), на рисунке 2 - формирование составного поля зрения с помощью симметрично расположенных относительно центра поля зрения ОЭС трех слева и трех справа идентичных макрооптических видеокамер с многоэлементными приемниками излучения с различными углами разрешения в азимутальной плоскости, на рисунке 3 - блок-схема, поясняющая устранение различий масштабов изображения на стыках смежных видеокамер с помощью координатно зависимого масштабирования, на рисунке 4 - пример трансформации масштаба изображения от трех камер, находящихся справа от центра поля зрения ОЭС, обеспечивающая монотонное изменение масштаба от центра к краю поля зрения, на рисунке 5 - пример изображения с трех камер ОЭС до трансформации, соответствующего графику, приведенному на рисунке 4А, на рисунке 6 - пример изображения с трех камер ОЭС после трансформации, соответствующего графику, приведенному на рисунке 4Б, на рисунке 7 - результат сшивки изображений от 6 камер, характеризующихся различным оптическим увеличением (угловое разрешение панорамы возрастает от центра к краям в 3 раза, для иллюстрации процесса сшивки, верхний и нижний края панорамы не обрезаны).
Предлагаемый способ реализуется следующим образом.
Формируется составное поле зрения (рисунок 2) с помощью симметрично расположенных относительно центра поля зрения ОЭС трех слева и трех справа идентичных макрооптических видеокамер с многоэлементными приемниками излучения и различными увеличениями, причем, максимальное увеличение имеют видеокамеры, ориентированные на удаленные участки зоны обзора пространства, а минимальное - видеокамеры, ориентированные на центр зоны обзора пространства. Зависимость увеличения (масштаба изображения камер) от угла между центром поля зрения ОЭС и произвольным направлением в азимутальной плоскости, до предобработки имеет ступенчатый вид (рисунок 4А). Однако полученное составное изображение от трех правых или трех левых камер имеет неудовлетворительный вид из-за большого шага ступеней (рисунок 5). Для устранения данного недостатка используется монотонное и безразрывное изменение масштаба изображения по всему полю зрения ОЭС, которое, как для трех правых камер, так и левых камер аппроксимируется кривой третьего порядка (рисунок 4Б).
Устранение различий масштабов изображения на стыках смежных видеокамер осуществляется координатно зависимым цифровым масштабированием, выравнивающим увеличение изображения вдоль линии сшивки для трех видеокамер, расположенных слева и трех видеокамер, расположенных справа относительно центра поля зрения ОЭС с помощью (рисунок 3) первого 1, второго 2, третьего 3, четвертого 4, пятого 5 вычислителей и блока 6 памяти, в котором хранятся значения количества пикселей в i-ом,  сегментированном изображении, углы ϕ1, ϕ2 и ϕ3 поля зрения соответственно первой, второй и третьей видеокамер, расположенных симметрично слева и справа относительно центра поля зрения ОЭС и количество М элементов приемника излучения по вертикали.
сегментированном изображении, углы ϕ1, ϕ2 и ϕ3 поля зрения соответственно первой, второй и третьей видеокамер, расположенных симметрично слева и справа относительно центра поля зрения ОЭС и количество М элементов приемника излучения по вертикали.
В первом вычислителе 1 по значениям Ni  и ϕ1, ϕ2, ϕ3, поступающим с соответствующих выходов блока 6 памяти, в соответствии с выражениями (2) и (3) вычисляются координаты 4 точек кубической параболы вида (1) для видеокамер, расположенных слева и справа относительно центра поля зрения ОЭС. На основе вычисленных в первом вычислителе 1 координат 4 точек параболы во втором вычислителе 2 с учетом значений Ni
и ϕ1, ϕ2, ϕ3, поступающим с соответствующих выходов блока 6 памяти, в соответствии с выражениями (2) и (3) вычисляются координаты 4 точек кубической параболы вида (1) для видеокамер, расположенных слева и справа относительно центра поля зрения ОЭС. На основе вычисленных в первом вычислителе 1 координат 4 точек параболы во втором вычислителе 2 с учетом значений Ni  , поступающих на его вход с выхода блока 6 памяти, осуществляется вычисление коэффициентов Sj
, поступающих на его вход с выхода блока 6 памяти, осуществляется вычисление коэффициентов Sj  (путем решения системы линейных уравнений, имеющей в матричной форме вид X*S=Y), которые используются в третьем вычислителе 3 для вычисления значений уj кривой в соответствии с выражением (4). Вычисленные значения yj поступают на вход четвертого вычислителя 4, куда с выхода блока 6 памяти поступают значения Ni и М.
(путем решения системы линейных уравнений, имеющей в матричной форме вид X*S=Y), которые используются в третьем вычислителе 3 для вычисления значений уj кривой в соответствии с выражением (4). Вычисленные значения yj поступают на вход четвертого вычислителя 4, куда с выхода блока 6 памяти поступают значения Ni и М.
По значениям этих величин в четвертом вычислителе 4 в соответствии с выражениями (5) вычисляются координаты пикселей трансформированного изображения, которым соответствуют пиксели исходного изображения с координатами i, j. На заключительном этапе в пятом вычислителе 5 по вычисленным в четвертом вычислите 4 значениям координат пикселей трансформированного изображения осуществляется вычисление размеров результирующих изображений для панорамы в соответствии с выражениями (6) и (7).
В результате формируется изображение (рисунок 6) с трех камер ОЭС после трансформации, соответствующего графику, приведенному на рисунке 4Б, а результат сшивки изображений от всех 6 камер, характеризующихся различным оптическим увеличением (для иллюстрации технологии сшивки, верхний и нижний края панорамы не обрезаны) показан на рисунке 7.
Таким образом, применение предлагаемого изобретения позволит сформировать панораму с монотонным и безразрывным изменением масштаба изображения по всему полю зрения оптико-электронной системы, характеризующейся повышенным угловым разрешением на краях зоны обзора пространства и пониженным разрешением в центре зоны обзора пространства.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. В.А. Соломатин, Н.В. Иванова. Современные направления развития панорамных оптико-электронных систем. Санкт-Петербург. X международная конференция «Прикладная оптика - 2012». Том 1, стр. 141, 144 таблица «Классификация и применение панорамных систем кругового обзора», системы с механическим сканированием (аналог).
2. В.А. Соломатин, Н.В. Иванова. Современные направления развития панорамных оптико-электронных систем. Санкт-Петербург. X международная конференция «Прикладная оптика - 2012». Том 1, стр. 144 таблица «Классификация и применение панорамных систем кругового обзора», макрооптические многоэлементные системы с составным угловым полем (прототип).








Способ и бортовая система обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа
Способ и устройство для управления наземным движением мобильных объектов на аэродроме
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящей по скорости помехи
Способ формирования сигнала управления истребителем в горизонтальной плоскости при его ближнем наведении на групповую воздушную цель
Способ однозначного измерения дальности до метеорологического объекта
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек - машина"
Радиолокационный способ и устройство для дистанционного измерения полного вектора скорости метеорологического объекта
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки
Способ измерения скорости полёта воздушного объекта и рлс для его осуществления
Способ распознавания направления самонаведения пущенной по группе самолётов ракеты с радиолокационной головкой самонаведения

