Результат интеллектуальной деятельности: СИГНАЛИЗАТОР ОБРЫВА И НАТЯЖЕНИЯ ТЯГОВОЙ ЦЕПИ ПОДЪЕМНИКА ГРУЗОВОГО
Вид РИД
Изобретение
Изобретение относится к области судостроения, в частности к контрольным и предохранительным устройствам подъемников грузовых. Изобретение предназначено для блокировки работы судового (корабельного) грузового подъемника в зависимости от параметров состояния тяговой цепи, таких, как натяжение и (или) обрыв. Изобретение может быть использовано в конструкциях различных подъемных и транспортировочных устройств, а также в конструкциях устройств содержащих тяговый элемент, такой как цепь, трос, нить, ремень, кабель, струна и т.д.
На судах (кораблях), для перемещения различных тяжелых грузов, между палубами, платформами и ярусами судна (корабля) используются подъемные средства, такие как подъемник грузовой, приводимые в движение через различные тяговые элементы, такие как цепь или трос. При этом поломка подъемных средств, а также создание связанных с такой поломкой аварийных и внештатных ситуаций, в режиме эксплуатации судна (корабля) не допустимы. Учитывая такие факторы, как морская качка, влияние перемещения грузов на остойчивость судна (корабля), ограниченность пространства и труднодоступность узлов и механизмов подъемных средств на судне (корабле) актуальной проблемой является создание простого в эксплуатации и надежного устройства обеспечивающего блокировку работы грузового подъемника, исключающего ложные срабатывания.
Известны, следующие охраняемые патентами устройства, имеющие сходный принцип действия и назначение:
- устройство по патенту на изобретение RU 2530082 C1 (МПК D04B 35/00, 35/14), содержащее нитенатяжитель и датчик контроля нити, выполненный в виде двуплечего поворотного рычага, одно плечо которого в рабочем положении взаимодействует с нитью, а второе, в случае обрыва нити - с контактом электрической цепи машины;
- подъемный механизм по патенту RU 2487833 C2 (МПК B66D 1/54; B06B 9/80), содержащий выключатель, предназначенный для остановки двигателя при уменьшении натяжения подъемного троса;
- датчик натяжения цепи цепного конвейера по патенту RU 2533953 C2 (МПК B65G 23/44, B65G 43/06), который содержит рабочий рычаг с нагружаемой прокладкой, присоединенный с возможностью поворота к раме шарнирной осью;
- группа изобретений по патенту RU 2601541 C2 (МПК B61H 13/02; F16D 66/00), относящаяся к датчику, установленному ниже корпуса железнодорожного ручного тормоза и определяющему по существу линейное перемещение элемента, непосредственно взаимодействующего с производящей усилие цепью.
Общими недостатками приведенных выше устройств, является недостаточная точность срабатывания, которая компенсируется за счет дополнительного использования сравнивающих устройств, управляющих программ и систем, что повышает сложность и соответственно стоимость таких устройств.
Указанные патенты-аналоги, в сравнении с заявленным изобретением, имеют отдельные общие функциональные и (или) конструктивные признаки, существенно отличаются по области применения и имеют иные условия и требования к их работе.
Наиболее близким аналогом является устройство по патенту RU 2601541 C2, описанное устройство и заявленное изобретение содержит корпус, производящую усилие цепь, элемент для горизонтального линейного перемещения, датчик, а также сжимаемое упругое средство.
При этом срабатывание устройства по прототипу обеспечивается за счет возвратно-поступательного линейного перемещения единого неразъемного элемента от производящей усилие цепи к датчику, электрически соединенному с системой управления. Заданная точность устройства обеспечивается за счет системы управления, которая выполнена с возможностью обработки сформированного управляющего сигнала поступающего от датчика.
Недостатками прототипа являются:
- необходимость использования системы управления для обеспечения заданной точности устройства;
- повышенная чувствительность линейной связи между воспринимающим и предающим усилие элементом и датчиком к колебаниям цепи, таким как вибрация;
- отсутствие средств ручного регулирования чувствительности устройства.
В отличие от прототипа, заявленное изобретение не требует использования для обеспечения заданной точности системы управления, а также обеспечивает устройство средствами ручного регулирования чувствительности.
Целью настоящего изобретения является создание простого в эксплуатации и надежного устройства, обеспечивающего блокировку работы грузового подъемника, исключающего ложные срабатывания.
Задачами изобретения являются:
- снижение чувствительности воспринимающего и предающего усилие элемента к отклонению тяговой цепи, при одновременном повышении точности срабатывания устройства;
- обеспечение устройства простыми и надежными средствами ручного регулирования.
Первая задача достигается за счет того, что в устройстве использована система рычагов переменной длины, которая шарнирно установлена на поворотной оси. При этом точность обеспечивается за счет заданных длин рычагов и их отношений, а также значений углов между рычагами.
Вторая задача достигается за счет того, что корпус устройства выполнен с возможностью смещения устройства относительно цепи в перпендикулярной к цепи плоскости, а выключатель выполнен с возможностью смещения относительно рычага, находящегося в механическом и функциональном взаимодействии с выключателем, передающим управляющий сигнал.
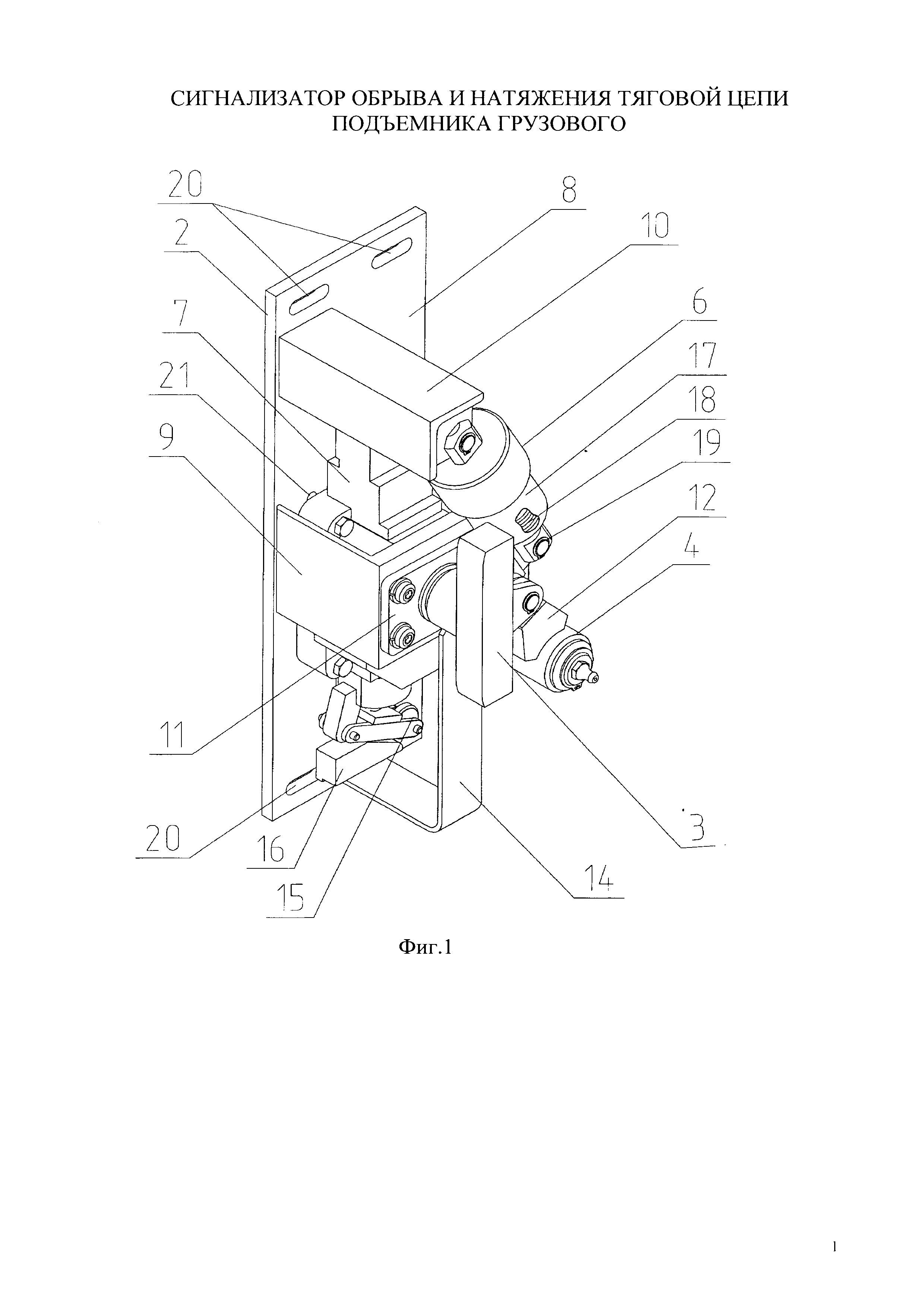
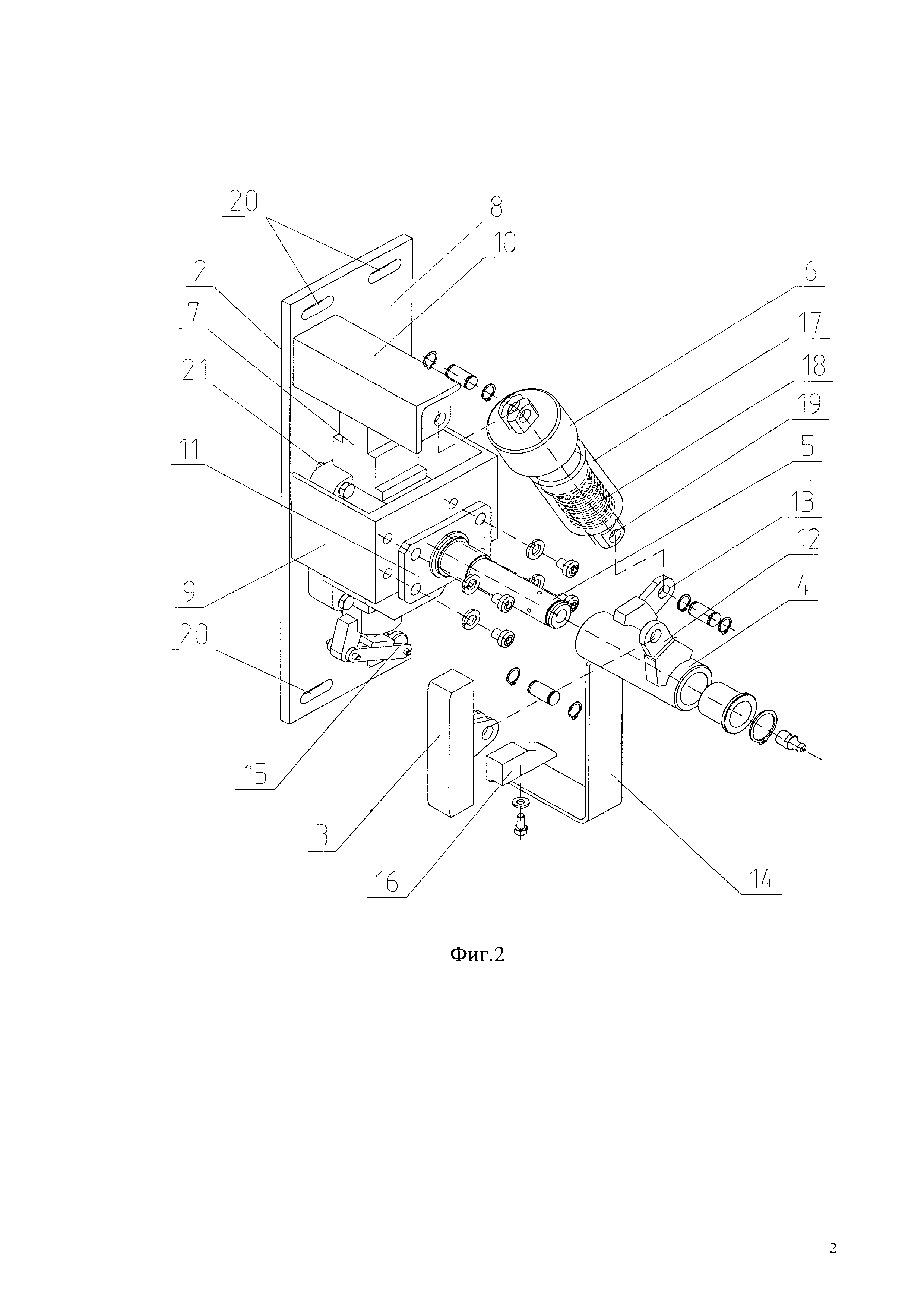
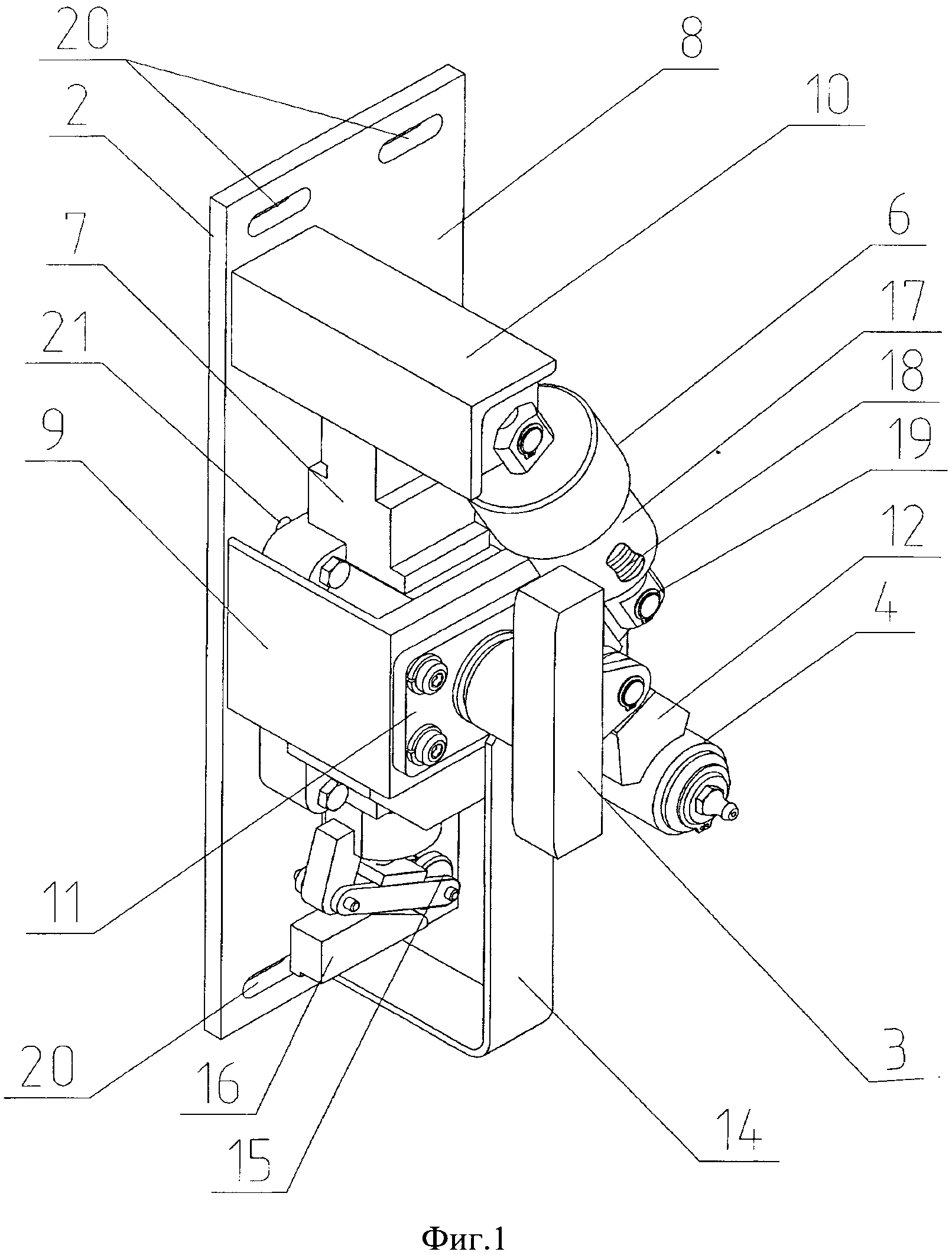
Сигнализатор обрыва и натяжения тяговой цепи 1 подъемника грузового содержит корпус 2, элемент, воспринимающий и передающий усилие от тяговой цепи (лыжа цепи 3), систему рычагов 4, поворотную ось 5, толкатель 6 и выключатель 7.
Корпус 2 состоит из монтажной платформы 8, основания 9, для размещения выключателя 7 и крепления поворотной оси 5, кронштейна 10 для крепления толкателя 6, а также площадки 11.
Система рычагов 4 выполнена, по крайней мере, из трех рычагов 12, 13, 14 шарнирно установлена на поворотной оси 5, а рычаги 12, 13, 14 системы рычагов 4 расположены перпендикулярно к поворотной оси 5 под фиксированным углом друг к другу и имеют переменную длину, на конце первого рычага 12, установлена лыжа цепи 3, воспринимающая и передающая усилие от тяговой цепи 1, конец второго рычага 13 соединен с толкателем 6, а конец третьего рычага 14 выполнен с возможностью механического и функционального контакта с роликом выключателя 15 через установленную на конце третьего рычага лыжу выключателя 16.
При этом толкатель 9 включает корпус толкателя 17, пружину 18, расположенную внутри корпуса толкателя и шток 19. Один конец толкателя 9 соединен с корпусом 2, а другой конец через шток 19 соединен со вторым рычагом 13 системы рычагов 4, передавая усилие посредством поворотной оси 5 на первый рычаг 12 и расположенную на нем лыжу цепи 3, обеспечивая тем самым, подпружинивание в направлении тяговой цепи 1.
При этом лыжа цепи 3, имеет плоскость, которая при работе устройства находится в механическом контакте с тяговой цепью 1.
Для ручной регулировки чувствительности устройства, корпус выполнен с монтажными отверстиями 20 и 21 профильной формы, которые выполняют функцию направляющих, обеспечивающих смещение корпуса 2 относительно тяговой цепи подъемника 1, а также выключателя 7 относительно третьего рычага 14.
Предполагаемое изобретение поясняется чертежами:
На фиг. 1, фиг. 2 изображены общий вид и разнесенный вид сигнализатора обрыва и натяжения тяговой цепи подъемника грузового.
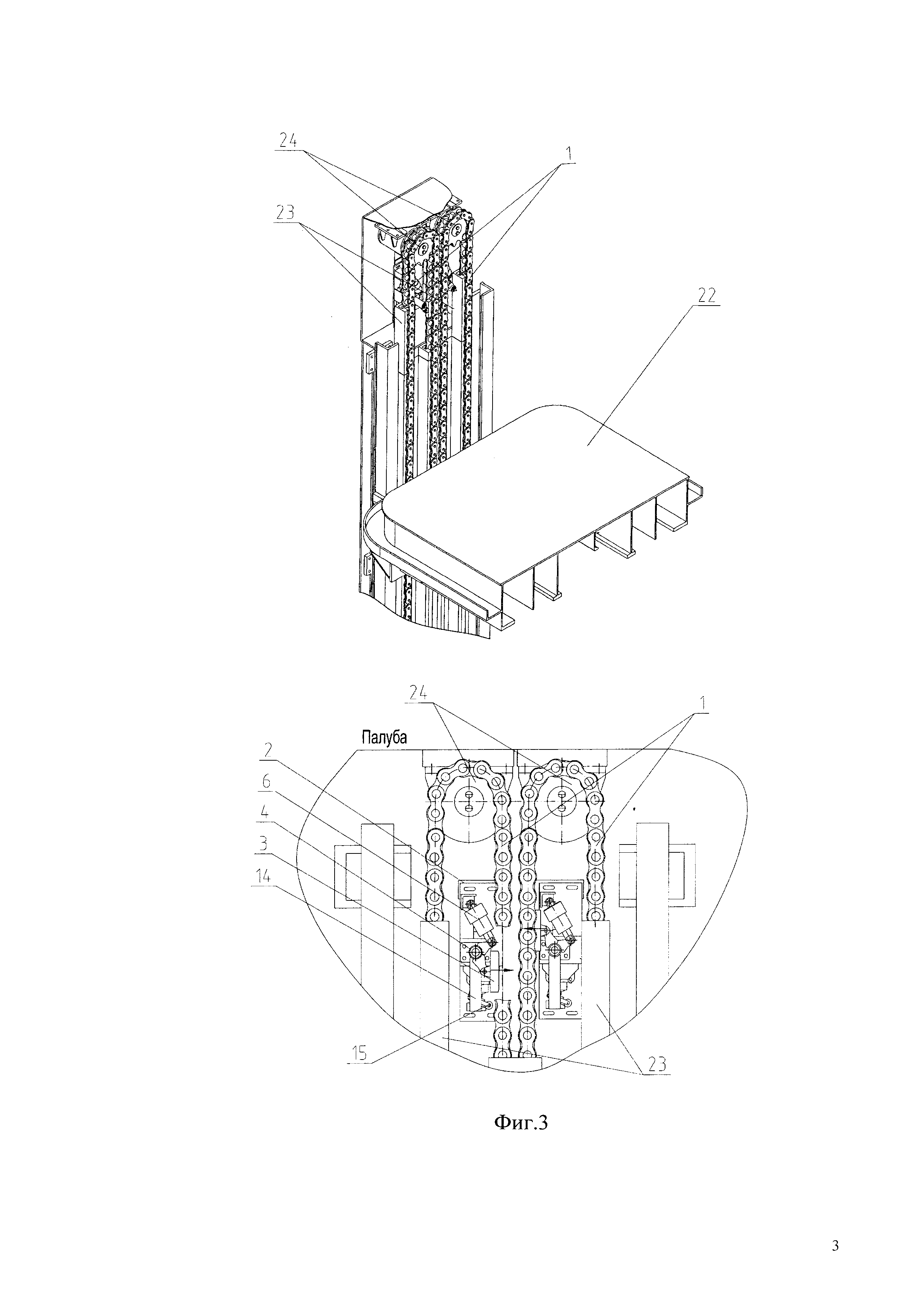
На фиг. 3 изображен вариант размещения сигнализаторов обрыва и натяжения цепи подъемника грузового на грузовом подъемнике.
Устройство работает следующим образом.
Во время работы подъемника грузового платформа подъемника 22 (см. фиг. 3) поднимается и опускается тяговыми цепями 1. Платформа двигается по направляющим платформы 23. Тяговые цепи 1 двигаются по направляющим тяговых цепей 23. При движении платформы подъемника 22 происходит натяжение тяговых цепей 1 на участке между узлами фиксации концов цепей к платформе подъемника 22 и звездочками цепными 24. Поскольку тяговые цепи 1 расположены в направляющих 24, контроль натяжения цепей может быть осуществлен только на участке между направляющими тяговых цепей 23 и звездочками цепными 24. Отклонение цепи от вертикальной плоскости в случае обрыва на данном участке составит от 8 мм до 10 мм. При натянутой тяговой цепи 1 (см. фиг. 3) лыжа цепи 3 (см. фиг. 1,2) находится в контакте с роликами тяговой цепи 1, при этом пружина 18, толкателя 6 через шток 19 передает усилие на второй рычаг 13 создавая вращательное движение системы рычагов 4 с передачей усилия на лыжу цепи 3 через первый рычаг 12, при этом лыжа 3 воздействует на тяговую цепь 1 и стремится отклонить ее от вертикальной плоскости. При отклонении тяговой цепи 1 от вертикальной плоскости (падение натяжения) более чем на 10 мм лыжа выключателя 16 закрепленная на конце на третьего рычага 14 накатывается на ролик выключателя 15 и выключатель 7 срабатывает, при этом происходит размыкание электрической цепи питания привода подъемника грузового.
Отклонение тяговой цепи 1 (см. фиг. 3) от вертикальной плоскости более чем на 10 мм происходит при обрыве тяговой цепи 1, однако при работе подъемника грузового возможно отклонение цепи от вертикальной плоскости при остановках платформы и снятия нагрузки с цепей тяговых. Конструкция системы рычагов 4 расположенных на поворотной оси 5 (см. фиг. 1, 2) позволяет выполнить настройку срабатывания сигнализатора обрыва и натяжения тяговой цепи подъемника грузового, и тем самым избежать ложных срабатываний во время остановок платформы подъемника 22 в условиях качки корабля. Это достигается за счет разной длины первого 12, второго 13, третьего 14 рычагов. Первый 12 и второй 13 рычаги различаются по длине незначительно, для равной передачи усилия от пружины 18 толкателя 6. Третий рычаг 14 в три раза длиннее первого рычага 12, что позволяет увеличить ход лыжи выключателя 16 относительно лыжи цепи 3 с более точным воздействием лыжи выключателя 16 на ролик выключателя 15.
Настройка усилия контакта лыжи цепи 3 (см. фиг. 1, 2) с тяговой цепью 1 (см. фиг. 3) подъемника грузового обеспечивается профильными монтажными отверстиями - 20 с симметричными закруглениями (см. фиг. 1, 2) на монтажной платформе 8 в корпуса 2, позволяющими смещать сигнализатор обрыва цепи в горизонтальной плоскости относительно плоскости цепи.
Настройка момента срабатывания выключателя 7 (см. фиг. 1, 2) обеспечивается профильными монтажными отверстиями 21 с симметричными закруглениями, на монтажной платформе 8 в корпусе 1, позволяющими смещать выключатель 7 в вертикальной плоскости относительно лыжи выключателя 16.
Таким образом, технический результат изобретения «Сигнализатор обрыва тяговой цепи подъемника грузового» достигается следующими техническими средствами:
- преобразование поступательного движения рычагов 12, 13, 14 во вращательное движение системы рычагов 4 на поворотной оси 5 (см. фиг. 1, 2);
- переменной длины рычагов 12, 13, 14 системы рычагов 4 (см. фиг. 1, 2);
- возможность перемещения сигнализатора относительно плоскости тяговой цепи 1 (см. фиг. 3) и выключателя 7 (см. фиг. 1, 2) относительно лыжи выключателя 16, за счет монтажных отверстий - 20, 21 профильной формы.
Устройство удержания авиационных боеприпасов за выступающие элементы подвески авиационных боеприпасов на стеллаже
Стеллаж универсальный малогабаритный для хранения авиационных боеприпасов
Крышка выхлопная
Пакет для хранения авиационных неуправляемых реактивных снарядов
Двухпанельный газоотражательный щит
Гидравлический привод корабельного подъемника
Носовое высадочное устройство
Траверса с захватами за бугели
Стеллаж для хранения авиационных боеприпасов
Газоотражательный щит с боковыми щитками
Огнепреграждающая штора
Кормовое высадочное устройство
Крышка выхлопная
Гидравлический привод корабельного подъемника
Носовое высадочное устройство
Судовой (корабельный) подъемник с одновинтовым приводом

