Результат интеллектуальной деятельности: САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД
Вид РИД
Изобретение
Изобретение относится к области автоматического управления электроприводами, в которых существенно повышаются величины моментов сухого трения.
Известно устройство для управления приводом робота, содержащее блок умножения, последовательно соединенные усилитель, электродвигатель, датчик тока, первый сумматор, второй выход электродвигателя соединен с исполнительным механизмом, датчиком положения и датчиком скорости, выходы датчика положения и датчика скорости соединены соответственно со вторыми входами второго сумматора и блока деления, второй вход первого сумматора соединен с выходом измерителя внешнего момента, последовательно соединенные инерционное дифференцирующее звено, вход которого подключен к выходу второго сумматора и к входу апериодического звена, а выход соединен с первым входом блока умножения, второй вход которого соединен с выходом блока деления, первый вход которого соединен с выходом интегратора, вход которого соединен с выходом первого сумматора, выход блока умножения соединен с первым входом третьего сумматора, второй вход которого соединен с выходом апериодического звена, а выход - с входом усилителя (см. авт. св. СССР №1142810, МПК G05B 11/01, 1985 г.).
Недостатком данного устройства является то, что оно позволяет улучшить точность и качество процесса управления электроприводом при любом значении его суммарного момента инерции, но при этом не обеспечивает инвариантность привода к изменению его момента сухого трения.
Известен самонастраивающийся электропривод, содержащий первый сумматор, последовательно соединенные корректирующее устройство с усилителем, электродвигатель с редуктором, выходной вал которого соединен с датчиком скорости и датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с входом электропривода, последовательно соединенные релейный элемент, вход которого соединен с выходом датчика скорости, второй сумматор, последовательно соединенные датчик тока якорной обмотки электродвигателя и третий сумматор (см. патент РФ №2060530, МПК G05B 13/02, 1996 г.).
Указанное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Но его недостатком является то, что оно позволяет улучшить точность и качество процесса управления, когда значительно изменяются инерционность объекта управления и активное сопротивление якорной обмотки электродвигателя, но при этом не обеспечивает сохранения заданной динамической точности управления при увеличении момента сухого трения. Это увеличение может произойти по различным многочисленным причинам, затрудняющим поворот выходного вала электропривода.
В результате возникает задача построения такой самонастраивающейся системы, которая обеспечила бы неизменную динамическую точность работы рассматриваемого электропривода при значительном изменении (увеличении) величины момента сухого трения.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает инвариантность качественных показателей и динамических свойств рассматриваемого привода к возможному увеличению момента сухого трения.
Поставленная задача решается тем, что в самонастраивающийся электропривод, содержащий первый сумматор, последовательно соединенные корректирующее устройство с усилителем, электродвигатель с редуктором, выходной вал которого соединен с датчиком скорости и датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с входом электропривода, последовательно соединенные релейный элемент, вход которого соединен с выходом датчика скорости, второй сумматор, последовательно соединенные датчик тока якорной обмотки электродвигателя и третий сумматор, дополнительно вводятся последовательно соединенные интегратор, вход которого соединен с выходом третьего сумматора, второй вход которого подключен к выходу релейного элемента, и четвертый сумматор, второй вход которого подключен к выходу датчика скорости, а выход - к третьему входу третьего сумматора и второму входу второго сумматора, третий вход которого соединен с выходом первого сумматора, а выход - с входом усилителя.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают инвариантность электропривода к изменению (в том числе и к значительному) величины момента сухого трения, что обеспечивает неизменное качество в процессе его эксплуатации.
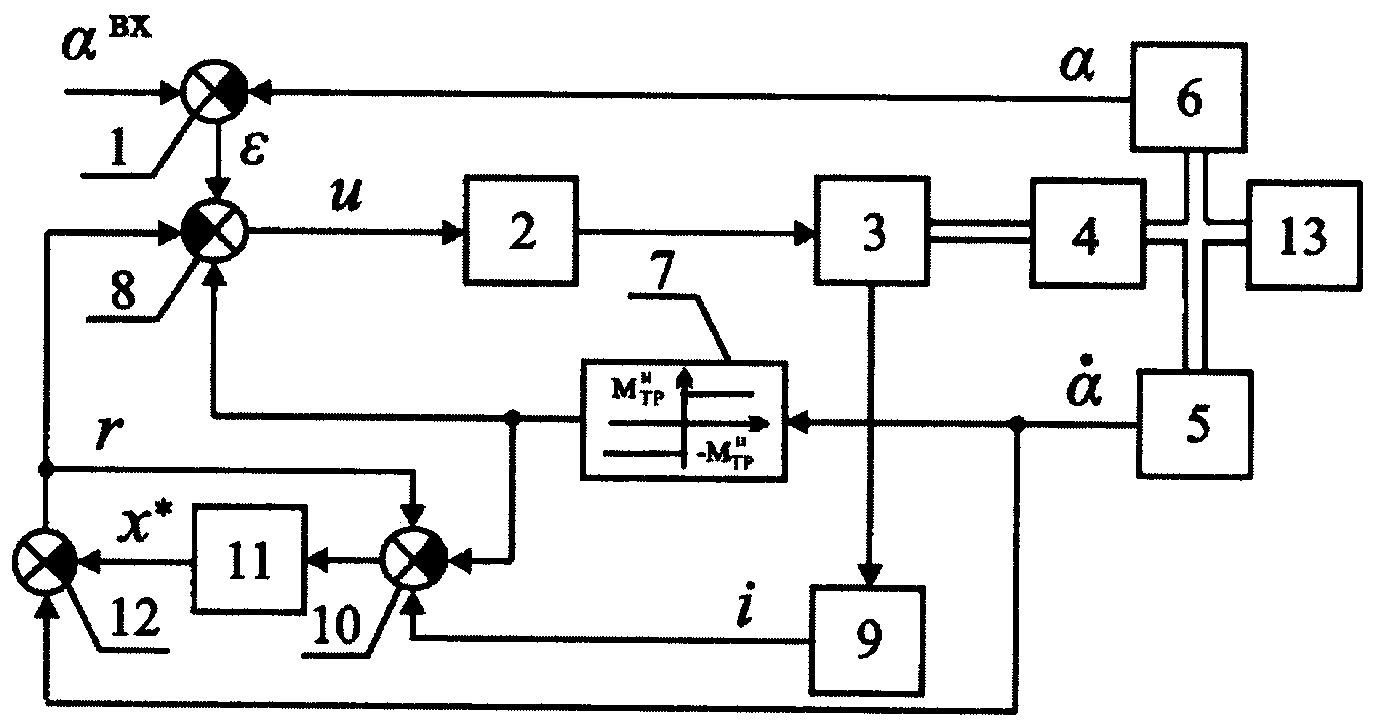
Изобретение поясняется чертежом, на котором представлена структурная схема самонастраивающегося электропривода и введены следующие обозначения: α - угол поворота выходного вала редуктора,  - задающий (входной) сигнал,
- задающий (входной) сигнал,  - скорость вращения выходного вала редуктора, ε - ошибка электропривода, i - ток якорной обмотки электродвигателя.
- скорость вращения выходного вала редуктора, ε - ошибка электропривода, i - ток якорной обмотки электродвигателя.
Самонастраивающийся электропривод содержит первый сумматор 1, последовательно соединенные корректирующее устройство 2 с усилителем, электродвигатель 3 с редуктором 4, выходной вал которого соединен с датчиком 5 скорости и датчиком 6 положения, выход которого подключен к первому входу первого сумматора 1, второй вход которого соединен с входом электропривода, последовательно соединенные релейный элемент 7, вход которого соединен с выходом датчика 5 скорости, второй сумматор 8, последовательно соединенные датчик 9 тока якорной обмотки электродвигателя и третий сумматор 10, последовательно соединенные интегратор 11, вход которого соединен с выходом третьего сумматора 10, второй вход которого подключен к выходу релейного элемента 7, и четвертый сумматор 12, второй вход которого подключен к выходу датчика 5 скорости, а выход - к третьему входу третьего сумматора 10 и второму входу второго сумматора 8, третий вход которого соединен с выходом первого сумматора 1, а выход - с входом усилителя 2. Объект управления 13 соединен с выходным валом редуктора.
Электропривод работает следующим образом. На второй положительный вход сумматора 1 с единичным коэффициентом усиления подается управляющее воздействие  обеспечивающее требуемый закон изменения угла α. Поскольку первый отрицательный вход этого сумматора имеет также единичный коэффициент усиления, то на его выходе вырабатывается сигнал ε ошибки электропривода, который поступает на третий положительный вход сумматора 8, имеющий единичный коэффициент усиления.
обеспечивающее требуемый закон изменения угла α. Поскольку первый отрицательный вход этого сумматора имеет также единичный коэффициент усиления, то на его выходе вырабатывается сигнал ε ошибки электропривода, который поступает на третий положительный вход сумматора 8, имеющий единичный коэффициент усиления.
Выходной сигнал нелинейного элемента 7 определяется выражением  где
где  - номинальное значение момента сухого трения электропривода, приведенное к валу электродвигателя при его вращении в одну из сторон. Этот сигнал, поступая с коэффициентом усиления R/(KУKM) (где R - активное сопротивление якорной обмотки электродвигателя, КУ - коэффициент усиления элемента 2, KM - коэффициент крутящего момента электродвигателя) на первый положительный вход сумматора 8, в установившемся состоянии компенсирует отрицательное влияние номинального значения момента сухого трения на точность работы электропривода.
- номинальное значение момента сухого трения электропривода, приведенное к валу электродвигателя при его вращении в одну из сторон. Этот сигнал, поступая с коэффициентом усиления R/(KУKM) (где R - активное сопротивление якорной обмотки электродвигателя, КУ - коэффициент усиления элемента 2, KM - коэффициент крутящего момента электродвигателя) на первый положительный вход сумматора 8, в установившемся состоянии компенсирует отрицательное влияние номинального значения момента сухого трения на точность работы электропривода.
Сформированный на выходе сумматора 8 сигнал, усиливаясь, поступает на электродвигатель 3, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины и знака этого сигнала.
Для сохранения заданной точности работы электропривода при возрастании момента сухого трения в процессе выполнения им конкретных технологических операций в электроприводе формируется дополнительный сигнал, который подается на второй отрицательный вход сумматора 8. Этот сигнал формируется следующим образом. Первый положительный вход сумматора 10 (со стороны датчика 9) имеет коэффициент усиления KM/J, второй отрицательный (со стороны элемента 7) - коэффициент усиления 1/J, а третий положительный - коэффициент усиления ω (J - момент инерции вала электродвигателя и вращающихся частей редуктора, приведенный к валу электродвигатля). В результате на выходе этого сумматора формируется сигнал

а на выходе интегратора 11, имеющего единичный коэффициент усиления, - сигнал 
где  - выходной сигнал сумматора 12, имеющего первый отрицательный (со стороны интегратора 11) и второй положительный входы с единичными коэффициентами усиления.
- выходной сигнал сумматора 12, имеющего первый отрицательный (со стороны интегратора 11) и второй положительный входы с единичными коэффициентами усиления.
Взяв производные от левой и правой частей выражения (2), с учетом выражения (1), а также того, что при номинальном значении момента сухого трения и введении указанного выше сигнала, компенсирующего это номинальное сухое трение, имеет место выражение  несложно получить:
несложно получить:  Если же величина момента сухого трения, повышаясь, становится отличной от номинальной, то ускорение
Если же величина момента сухого трения, повышаясь, становится отличной от номинальной, то ускорение  вращения вала электродвигателя должно замедлиться, и становится справедливым выражение
вращения вала электродвигателя должно замедлиться, и становится справедливым выражение

где  - величина, характеризующая значение, на которое возрастает величина момента сухого трения.
- величина, характеризующая значение, на которое возрастает величина момента сухого трения.
Решение уравнения (3) имеет вид:  Поскольку положительная величина ω может быть выбрана достаточно большой, то в быстро наступающем установившемся режиме работы системы (спустя малое время t) имеет место соотношение δ=ωr.
Поскольку положительная величина ω может быть выбрана достаточно большой, то в быстро наступающем установившемся режиме работы системы (спустя малое время t) имеет место соотношение δ=ωr.
На выходе сумматора 8, второй вход которого имеет коэффициент усиления  формируется сигнал u=u1+uc, который помимо основного
формируется сигнал u=u1+uc, который помимо основного  содержит сигнал самонастройки
содержит сигнал самонастройки  обеспечивающий инвариантность электропривода к изменению величины момента сухого трения, что обеспечивает неизменное качество в процессе его эксплуатации.
обеспечивающий инвариантность электропривода к изменению величины момента сухого трения, что обеспечивает неизменное качество в процессе его эксплуатации.
Самонастраивающийся электропривод
Способ монтажа опорного блока платформы
Ледостойкий опорный блок морского инженерного сооружения
Самонастраивающийся электропривод
Турбокомпрессор
Турбомашина
Ротор турбомашины
Способ получения макропористых материалов на основе оксидов вольфрама или макропористых материалов на основе оксидов вольфрама с частичным восстановлением вольфрама до металлической формы
Способ приготовления питательной среды для учета сапрофитных гетеротрофных бактерий в морской воде
Композиция для приготовления теста для хлеба пшеничного "жемчужный"
Способ получения карты мощности антропогенных карбонатных отложений археологического памятника типа "раковинная куча"
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Узел подготовки пульпы из золошлаковых отходов
Способ автоматического формирования гладких траекторий движения мобильного робота в неизвестном окружении
Способ автоматической обработки крупногабаритных тонкостенных изделий
Способ обработки легкодеформируемых изделий
Способ управления манипулятором
Самонастраивающийся электропривод
Самонастраивающийся электропривод

