Результат интеллектуальной деятельности: Способ акустической локализации узлов сети транспондеров для определения положения гибкой протяженной буксируемой антенны
Вид РИД
Изобретение
Изобретение относится к области морской сейсморазведки, к способам определения пространственного положения и формы сейсмокос, буксируемых сейсморазведочными судами, с помощью сети гидроакустических приемопередающих устройств (транспондеров), установленных на сейсмокосах, буксирующем судне, концевых буях, пневмопушках, параванах. В более общем виде, изобретение может быть использовано для определения местоположения узлов плотной акустической сети приемопередающих устройств по временным задержкам излучаемых и принимаемых ими сигналов в ограниченном временном интервале.
Одним из основных методов морской сейсморазведки на акваториях является использование судов, буксирующих сейсмические источники (обычно пневмопушки) и сейсмокосы, представляющие собой гибкие кабели, на которых установлены группы гидрофонов. В процессе буксировки сейсмические источники излучают сейсмо-акустические сигналы, которые проходя через толщу воды и далее в дно, отражается от границ раздела и неоднородностей геологической среды и эти отражения регистрируются гидрофонами сейсмокос. Зарегистрированные гидрофонами в сейсмокосах отраженные сигналы являются исходными данными для решения обратной задачи по определению положения границ раздела геологической среды и ее акустических свойств.
Для решения обратной задачи по восстановлению границ раздела и акустических свойств неоднородной геологической среды, необходимо знать пространственное положение источников и приемников сигнала. При этом следует учитывать, что сейсмокосы буксируются параллельно, как правило, рядами до 12 штук на расстоянии порядка сотни метров друг от друга на глубинах 8-10 метров, а их длина при этом может достигать 10-15 км. При буксировке системы сейсмокос на таких пространственных масштабах форма сейсмокос и взаимное расположение гидрофонов между сейсмокосами может существенно меняться, что не позволяет непосредственно рассматривать совокупность гидрофонов в сейсмокосах в качестве системы наблюдений, даже в случае, когда известно положение начала и конца каждой сейсмокосы, измеренное, например, с помощью систем GPS приемников или лазерных дальномеров, установленных на буях в начале и конце каждой сейсмокосы. Решение задачи пространственного позиционирования сейсмокос, которое позволяет определить пространственное положение гидрофонов в косах, может быть получено с требуемой точностью при измерении тем или иным способом положений датчиков, устанавливаемых с определенной периодичностью вдоль сейсмокос. Ранее предложенные способы решения этой задачи описаны в патентах [1-8]. Наибольшее распространение получил акустический способ измерения дистанций между сетью гидроакустических приемо-передатчиков (транспондеров), устанавливаемых вдоль сейсмокос.
Известна система позиционирования [1], включающая в себя, по меньшей мере, два надводных модуля, перемещающихся с буксирующим судном по поверхности воды. Каждый надводный модуль имеет приемник GPS, который принимает радиочастотные сигналы GPS и определяет его местоположение. Акустический передатчик в каждом надводном модуле передает акустический сигнал, представляющий положение надводного модуля. Множество акустических приемников расположено под водой вдоль одного или нескольких кабелей, буксируемых за судном. Каждый кабель проходит от головного конца, ближайшего к судну, до противоположного хвостового конца. Каждый модуль акустического приемника включает в себя акустический приемник, который принимает акустические сигналы, передаваемые надводными модулями, и определяет свое положение на основе этих акустических сигналов.
В этом патенте не раскрыт способ акустического измерения расстояния при наличии большого числа приемо-передатчиков, работающих одновременно, а также не указан способ расчета положения узлов акустической сети по данным GPS и измеренным акустическим способом расстояний.
Детали акустического измерения расстояния между акустическими приемопередатчиками раскрыты в патенте [2], в котором описано устройство для передачи и приема коротких гидроакустических импульсов и способ определения времени прихода принятых гидроакустических импульсов с целью измерения расстояния между парами таких устройств.
Устройство для акустического измерения расстояний представляет собой гидроакустический приемо-передатчик (транспондер) оснащенный антенной пьезокерамическим шарообразным электрогидроакустическим преобразователем, контроллером, АЦП и другими электронными компонентами, осуществляющими формирование, передачу, прием и детектирование гидроакустических импульсов с заданной несущей и формой огибающей.
В режиме передачи устройство формирует электрический сигнал заданной несущей частоты и формы огибающей, и, с помощью антенны осуществляет преобразование этого сигнала в акустический импульс, распространяющийся в водной среде.
Антенна приемопередатчика (пьезокерамический шарообразный электрогидроакустический преобразователь) позволяет эффективно излучать и принимать сигналы в диапазоне от 50 до 100 кГц. Программы контроллера, а также входные и выходные фильтры настроены на излучение и прием сигналов с несущими частотами 55, 65, 75, 85, 95 кГц, соответствующими частотным каналам, и плавной огибающей, формируемой по итерационному алгоритму Парка-Макклеллана.
Детектирование принятых сигналов осуществляется с помощью синфазной и квадратурной корреляции с образцами сигнала, формируемыми по заданным параметрам обрабатывающим контроллером.
Параллельно на устройстве осуществляется детектирование 5 частотных каналов. Время прихода сигнала определяется по максимуму дискретной корреляционной функции, если величина этого максимума превосходит заданный порог.
Дополнительно, для каждого измеряемого расстояния устанавливается временное окно, в течение которого происходит детектирование измеряющего сигнала.
Как варианты использования предлагается также работа приемопередатчиков в режиме маяка-ответчика. Для определения глубины приемопередатчики снабжаются датчиками давления, показания которых по каналам связи передаются на борт буксирующего судна вместе с измеренными дистанциями.
Существенным недостатком предложенного способа является ограниченное число расстояний, которые можно измерять в течение короткого промежутка времени. Поскольку имеется всего лишь пять частотных каналов, по необходимости приходится распределить измерения во времени так, чтобы было возможно различать расстояния, для измерения которых используются сигналы с одинаковой несущей частотой. При этом для каждого измеряемого расстояния приходится устанавливать временные окна, в течение которых происходит детектирование измеряющего сигнала. Это обстоятельство накладывает серьезные ограничения на работу системы при изменении ее пространственной конфигурации. При наличии всего пяти частотных каналов для большого числа транспондеров и близкой к регулярной сети их расстановки, обусловленной конструкцией и регулярным расположением сейсмокос при сейсморазведке, существует проблема наложения временных окон для транспондеров, излучающих сигналы с одинаковыми несущими частотами. Кроме того, небольшое число расстояний, которое можно измерить таким способом для каждого узла сети транспондеров, оказывается на практике еще меньше из-за возможного "замирания" сигнала из-за его деструктивной интерференции с отраженным от поверхности воды сигналом. Этот эффект может в какие-то моменты времени приводить к недостатку измеренных расстояний между элементами сети транспондеров, необходимых для решения задачи об их взаимном расположении в сети.
На преодоление последнего замечания направлен способ, описанный в патенте [3]. В нем, в дополнение к способу, описанному в патенте [2], в случае, если не удается зарегистрировать прямой сигнал, предпринимается попытка зарегистрировать сигнал, отраженный от дна, что в условиях заранее известной глубины позволяет определить (рассчитать) необходимое расстояние между узлами сети. Данный способ позволяет увеличить число независимо определяемых расстояний между транспондерами сети, поскольку временные окна, в которых детектируются сигналы, отраженные от дна, могут существенно отличаться от временных окон прямых сигналов.
Недостатком такого подхода является то, что он не снимает проблемы корректного детектирования сигналов при большом числе одновременно работающих транспондеров, поскольку при ограниченном числе несущих частот временные окна для прямых сигналов, соответствующих большим расстояниям, могут накладываться на временные окна отраженных от дна сигналов, соответствующих меньшим расстояниям. В силу переменности глубины моря в месте проведения сейсмических работ избежать такой накладки временных окон прямых и отраженных от дна сигналов принципиально невозможно. Кроме того, из-за вариаций коэффициента отражения звука от дна становится проблемным определение порога отсечки для отраженных от дна сигналов. Также следует заметить, что первичное детектирование сигналов происходит непосредственно в транспондерах, а информацию о переменной глубине дна нужно постоянно передавать в транспондер по внешнему каналу связи с борта судна, что может вызывать дополнительные затруднения.
Известен способ [4] увеличения одновременно измеряемых расстояний между приемопередатчиками, за счет того, что контроллер или процессор встроенного компьютера каждого приемопередатчика конфигурируется для измерения расстояний до заранее определенной группы приемопередатчиков. При этом расстояние до каждого передатчика из этой группы измеряется в своем, в заранее известном, диапазоне. При этом сигналы за пределами временного окна, соответствующего заданному диапазону расстояний не используются. В каждой группе передатчики сконфигурированы для генерации акустических сигналов по разным частотным каналам. При этом частотные каналы приемопередатчиков выбираются таким образом, чтобы в одно и то же временное окно приемника не приходили сигналы с одной и той же несущей частотой от различных передатчиков, то есть передатчики использующие один и тот же частотный канал должны быть расположены на существенно различных расстояниях от регистрирующих их сигналы приемников.
Группа приемопередатчиков, до которых производится измерение расстояния заданным приемопередатчиком определяется с учетом расстояния слышимости, то есть максимального расстояния на котором возможен уверенный прием гидроакустического импульса от приемопередатчика группы.
При этом часть расстояний между приемопередатчиками может быть определена по длине кабеля между устройствами на одной косе, и по расстоянию между косами (фиксированному параванами) для соседних устройств на разных косах.
Ключевым моментом, по мнению автора патента [4], является то, что в рамках такой системы излучение сигналов происходит в одно и то же время, все расстояния измеряются за один цикл, а время самого измерения определяется максимальным измеряемым расстоянием.
К недостатку предложенного способа можно отнести жесткое фиксирование достаточно узких временных окон, которое с одной стороны хотя и позволяет использовать одинаковые сигналы для измерения существенно различных расстояний в одном цикле измерения, так как эти сигналы приходят в разное время, но с другой стороны изменение заранее установленной конфигурации, например во время поворота, сноса подводным течением и др. приводит к невозможности зарегистрировать сигналы в этих окнах, а следовательно измерить расстояния вообще. Таким образом, предложенная система позиционирования может работать только в условиях близких к заданной конфигурации. Ситуация усугубляется при наличии отраженных от дна сигналов. Кроме того, как и в замечании к патенту [2] при наличии небольшого числа частотных каналов для большого числа транспондеров и близкой к регулярной сети их расстановки, обусловленной конструкцией и регулярным расположением сейсмокос при сейсморазведке, остается проблема наложения временных окон для транспондеров, излучающих сигналы с одинаковыми несущими частотами.
Известен способ [5] динамического выбора временных окон на основе регулирования пороговой характеристики обнаружения у детектора импульсов, при котором детектор выбирает импульсный сигнал, амплитуда которого превышает порог обнаружения на наибольшую величину, как интересующий сигнал. Время приема, совпадающее с обнаружением и относящееся к событию синхронизации, назначается искомому сигналу. Время приема используется для регулировки характеристики порога обнаружения и временного окна приемника в ожидании следующего ожидаемого импульсного сигнала, соответствующего следующему событию синхронизации.
Характеристика порога обнаружения является параболической с вершиной параболы, центрированной в окне обнаружения на минимальном пороговом уровне. Устройство слежения оценивает время прихода следующего ожидаемого импульса на основании моментов приема самых последних импульсов. Расчетное время приема - это первый параметр, используемый для регулировки временного положения пороговой характеристики. Ширина параболы и глубина вершины или минимальный уровень обнаружения регулируются вторым параметром, представляющим качество вышеупомянутых оценок. Хорошие оценки сужают параболу и опускают ее вершину; плохие оценки расширяют параболу и поднимают ее вершину. Для нормализации пороговой характеристики используются измерения уровня шума, когда не ожидается никаких импульсов.
В другом варианте устройство слежения за импульсами соединено с приемником с согласованным фильтром, использующим копию импульса, передаваемого удаленными акустическими передатчиками и характеризуемого произведением с большой шириной полосы частот для выделения переданного импульса из окружающего акустического шума. Предпочтительным сигналом является частотно модулированный импульс (ЧМ импульс) с разверткой, имеющий гиперболическую частотно-временную характеристику (ГЧМ импульс) и ширину импульса около 10 мс.
Недостатком предложенного способа является то, что динамический выбор временных окон в принципиальном плане не снимает проблему их взаимного наложения при ограниченном числе используемых несущих частот. Это ограничивает возможность применения предлагаемого подхода для сетей с большим числом одновременно работающих транспондеров. В случае же применения ЧМ и ГЧМ импульсов, их успешное детектирование при попадании в одно и то же временное окно импульсов от разных транспондеров представляет трудно решаемую проблему. Кроме того, динамическое изменение временных окон и порогов обнаружения по последнему принятому сигналу в условиях достаточно частого "замирания", то есть, фактически, не обнаружения сигнала может приводить к достаточно частому увеличению окон и уменьшению порогов, а это в свою очередь может приводить к ложному детектированию другого сигнала с той же частотой или характеристикой ГЧМ, поскольку количество различных сигналов, используемых в короткий промежуток времени цикла измерений ограничено.
Известен отличный от акустического способ позиционирования сейсмокос [6], в котором для определения положения сейсмокос предлагается использовать системы компактных датчиков положения (магнитометров и акселерометров) размещенных группами вдоль сейсмокос и связанных, как правило, с узлами управления положением, системы GPS позиционирования судна, а также с использованием лазерного измерения расстояний до отражателей на концевых буях. При этом для определения положения используется модель сейсмокос в виде кубических сплайнов в представлении В-сплайнов и с интервалом в 5 секунд решается задача определения расположения модельной сейсмокосы, описываемой кубическим сплайном, удовлетворяющая данным датчиков положения и лазерных измерений расстояний. Также используется фильтр Кальмана для сглаживания входных данных от датчиков положения.
Этот способ имеет ряд очевидных недостатков, связанных с тем, что восстановление положения каждой косы осуществляется независимо от других сейсмокос, и поэтому точность определения расстояний между сейсмокосами принципиально не контролируется.
Известен способ [7], в котором предлагается объединить методы позиционирования сейсмокос, основанные на использовании датчиков положения, и методы, основанные на использовании сети гидроакустических приемопередатчиков. Предлагается определять положение сейсмокос в промежутках между определениями положения на основе акустического способа измерения расстояний между узами сети гидроакустических приемопередатчиков путем моделирования движения сейсмокос по данным акселерометров.
Недостатком предложенного в патенте [7] способа является отсутствие конкретных предложений по измерению расстояний между узами сети гидроакустических приемопередатчиков, который позволил бы избежать проблем с их определением при наличии большого количества одновременно работающих транспондеров и малом числе несущих частот, используемых для генерации сигналов.
Наиболее близким по технической сущности и достигаемому результату является способ определения положения буксируемых сейсмических кос [8], основанный на использовании гидроакустических приемников и передатчиков встроенных в сейсмокосу.
В частности, предлагается способ определения относительного положения множества буксируемых морских сейсмических кос, состоящий из несколько этапов:
- буксировка множества акустических передатчиков, установленных внутри кос, при этом передатчики приспособлены для передачи широкополосных сигналов, имеющих низкую взаимную корреляцию между сигналами разных передатчиков;
- буксировка множества акустических приемников, установленных внутри кос, при этом приемники приспособлены для приема сигналов передатчиков, передаваемых в линейном направлении между передатчиками и приемниками, установленными в одной и той же косе, и для приема сигналов, передаваемых в поперечном направлении между передатчиками и приемниками, установленными на разных косах;
- передача сигналов от передатчиков;
- прием сигналов на приемниках;
- взаимная корреляция принятых сигналов с копиями сигналов передатчиков для определения идентичности передатчиков принятых сигналов и определения времени прохождения принятых сигналов;
- преобразование времени прохождения в расстояния между идентифицированными передатчиками и приемниками для определения линейных расстояний вдоль кос между передатчиками и приемниками в одной и той же косе и расстояний между передатчиками и приемниками в разных косах;
- объединение преобразованных расстояний для формирования сетевого представления трилатерации расстояний между передатчиками и приемниками;
- решение сетевого представления трилатерации для определения относительного положения передатчиков и приемников в косах, включая изменения положения в результате растяжения кос, а также изменения положения в результате движения кос, а также для определения относительного положения кос из взаимного расположение передатчиков и приемников.
Этап передачи сигналов дополнительно включает:
- передачу сигналов временной синхронизации на процессоры передатчиков, управляющих передатчиками;
- передачу расписаний запуска для передачи сигналов процессорам;
- использование сигналов временной синхронизации и расписаний запуска в процессорах передатчиков для управления передачей сигналов от передатчиков.
Этап приема сигналов дополнительно включает:
- передачу сигналов временной синхронизации на процессоры приемников, управляющие приемниками;
- передачу временных окон для прослушивания сигналов в процессоры приемника;
- использование сигналов временной синхронизации и временных окон в процессорах приемника для управления приемом сигналов приемниками.
Этап преобразования времени пробега в расстояния дополнительно включает:
- использование сигналов временной синхронизации и расписаний запуска в процессорах для расчета времени прохождения между передатчиками и приемниками;
- развертывание датчиков скорости звука для определения локальной скорости звука в воде;
- использование локальной скорости звука в воде для преобразования времени пробега в расстояния.
Этап взаимной корреляции принятых сигналов дополнительно включает:
- компенсацию принимаемых сигналов на эффекты Доплера;
- хранение копий сигналов передатчика в процессорах;
- создание копий сигналов передатчика в процессорах; В рамках этого способа предполагается:
- определение абсолютных опорных позиций на косах;
- использование абсолютных исходных положений для определения абсолютных положений кос из относительных положений кос.
В предлагаемом способе передатчики и приемники работают в полосе частот приблизительно от 10 до 40 кГц, а в качестве сигналов используются шумоподобные последовательности Голда или Кассами или линейно-частотно модулированные (ЛЧМ) сигналы.
К недостаткам предлагаемого способа следует отнести:
1. Использование шумоподобных последовательностей или ЛЧМ сигналов приводит к существенному увеличению длительности этих сигналов. За время излучения и регистрации транспондеры на буксируемых сейсмокосах могут существенно сместиться, что может привести к ухудшению точности определения их пространственного положения. Кроме того, одновременный прием и излучение одним транспондером длительных широкополосных сигналов сопряжен с целым рядом технических трудностей, а при последовательном излучении и приеме сигналов большой длительности вокруг транспондера образуется «мертвая зона», внутри которой сигналы от других транспондеров не регистрируются. Размер этой «мертвой зона» прямо пропорционален длительности излучаемого сигнала. Таким образом, может быть потеряна наиболее точная информация о ближайших связях акустической сети.
2. Взаимная корреляция принятых сигналов с копиями широкополосных сигналов передатчиков для определения идентичности является весьма ресурсоемкой процедурой. Это может приводить к перегрузке процессоров и ограничениям при большом числе различных одновременно идентифицируемых сигналов. Необходимость хранения большого числа копий сигналов передатчика в оперативной памяти процессоров также ограничивает их ресурс. Использование более высокопроизводительных процессоров с высоким энергопотреблением для встроенного оборудования может быть затруднено из-за габаритных ограничений, и критически увеличивает расход батареи для навесного оборудования.
3. В патенте не раскрыты детали решения сетевого представления трилатерации, которые представляют существенную часть достижения конечного результата по определению положения буксируемых сейсмических кос.
Отмеченные в прототипе и аналогах недостатки отсутствуют в способе акустической локализации узлов сети транспондеров для определения положения гибкой протяженной буксируемой антенны, который является предметом предлагаемого изобретения, а именно:
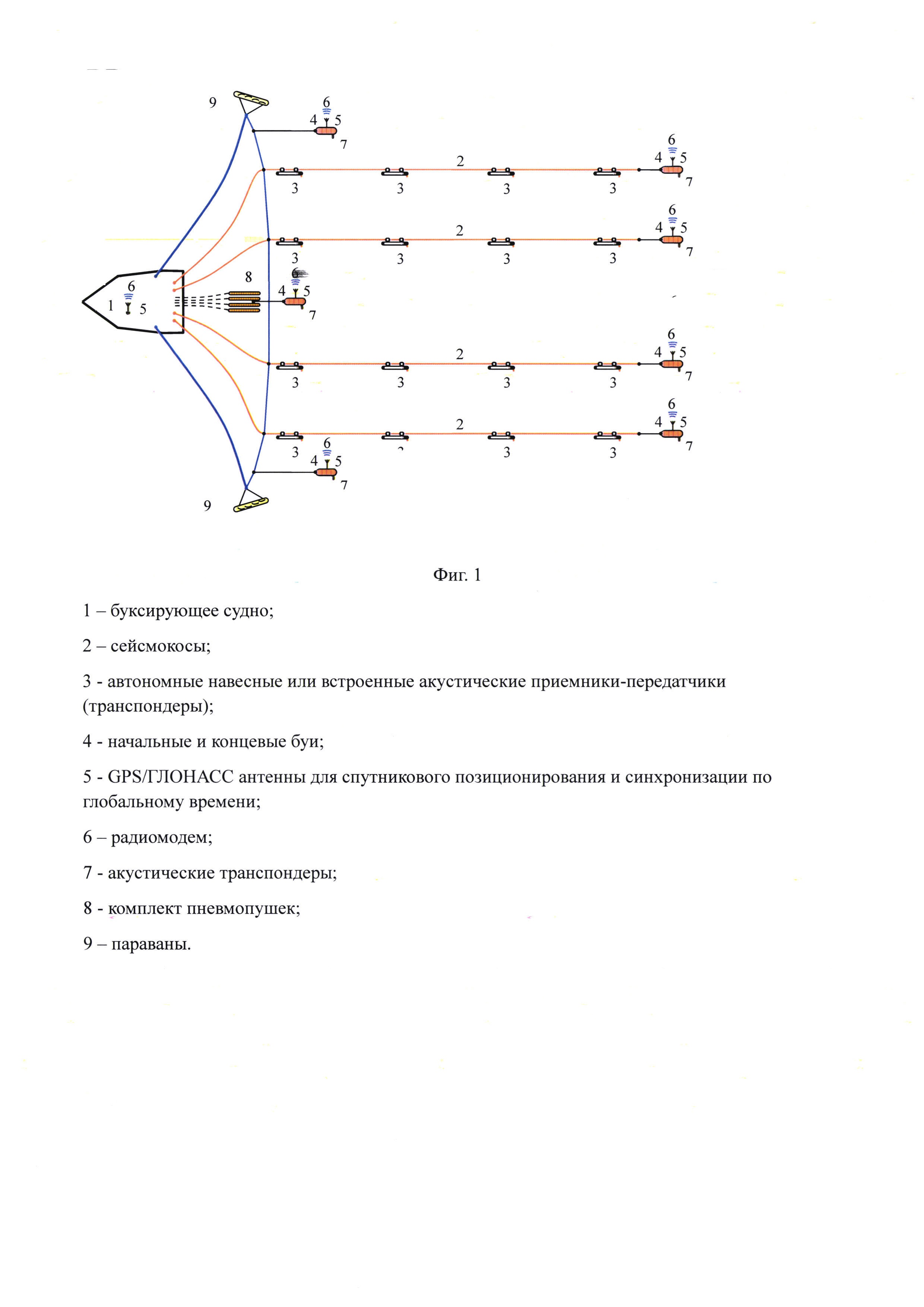
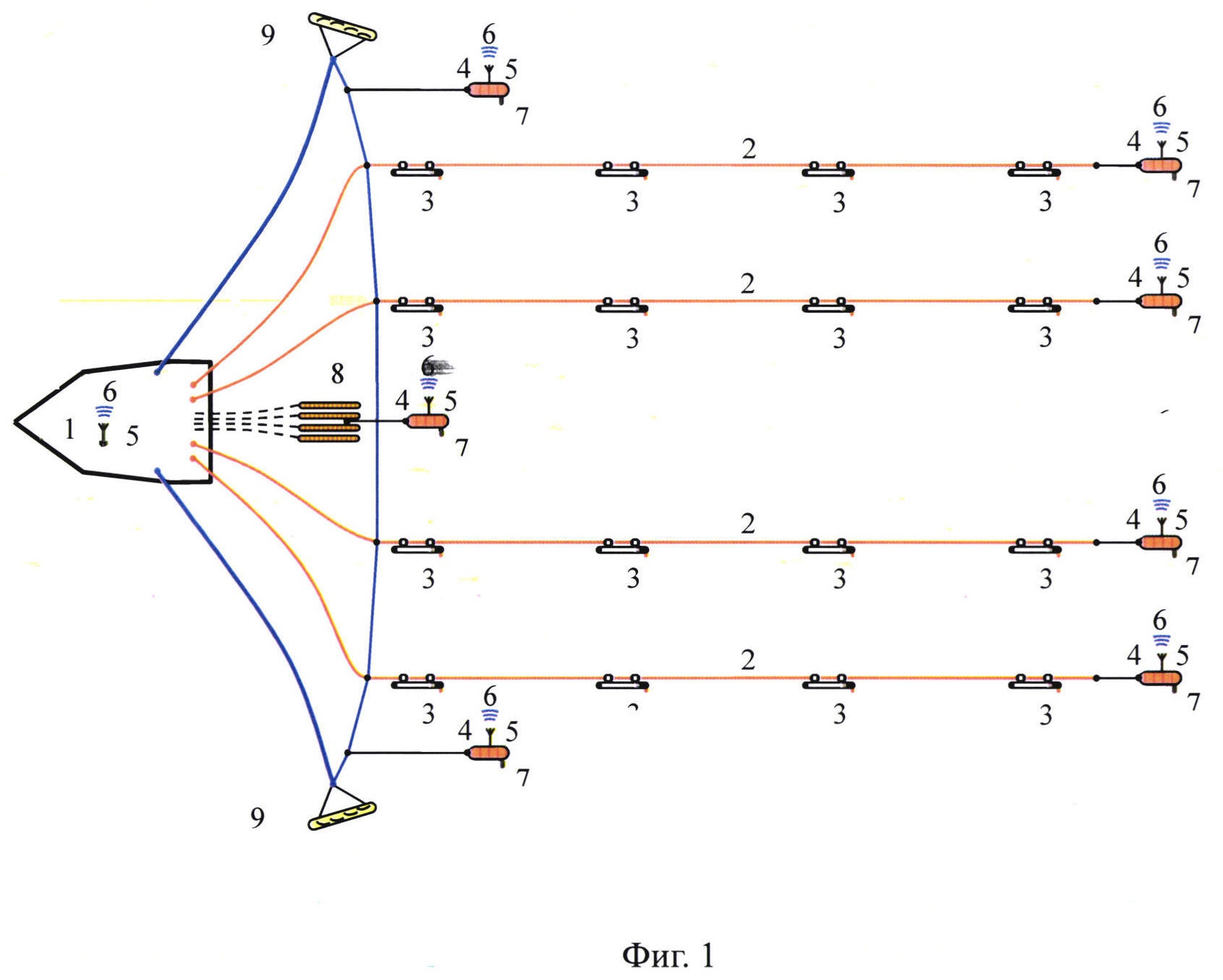
Способ акустической локализации узлов сети транспондеров для определения положения (позиционирования) совокупности совместно буксируемых сейсмокос (гибких протяженных буксируемых антенн) (см. фиг. 1), состоящий из нескольких этапов:
1. Буксировка судном 1 множества автономных навесных или встроенных в сейсмокосы 2 акустических приемников-передатчиков (транспондеров) 3, при этом транспондеры приспособлены для приема и передачи коротких последовательностей тоновых акустических импульсов с различными несущими частотами, имеющих низкую фигурвзаимную корреляцию между сигналами разных передатчиков, передаваемых между транспондерами, установленными как вдоль одной и той же сейсмокосы, так и на разных косах;
2. Буксировка начальных и концевых буев 4 с установленными на них GPS/ГЛОНАСС антеннами 5 для их спутникового позиционирования и для синхронизации по глобальному времени, и радиомодемом 6 для передачи этой информации на борт судна, а также с установленными на буях акустическими транспондерами 7, при этом начальные и концевые буи используются для определения абсолютных координат опорных точек сети акустических транспондеров. На схеме также показан комплект пневмопушек 8, и параваны 9, с помощью которых разводятся сейсмокосы 2;
3. Излучение и прием акустических сигналов, синхронизированный по глобальному времени, сетью транспондеров, установленных на сейсмокосах и начальных и концевых буях, при этом синхронизация транспондеров, расположенных на/в сейсмокосах, осуществляется по линиям связи в сейсмокосах, а транспондеров, расположенных на начальных и концевых буях - по радиоканалу или глобальному времени по данным с установленных на них GPS/ГЛОНАСС антенн.
4. Обработка принятых акустических сигналов процессорами в транспондерах, включающая выделение сигналов, излучаемых предварительно заданным набором других транспондеров сети и определение времен задержек прохождения акустических сигналов до них.
5. Передача в бортовой компьютер информации о временах задержек прохождения акустических сигналов от предварительно заданного набора транспондеров сети до заданного транспондера, в том числе дополнительной информации о глубине транспондеров, их пространственной ориентации, заряде батареи и др., при этом передача информации от транспондеров, расположенных на сейсмокосах, осуществляется по линиям связи в косах, а от транспондеров, расположенных на начальных и концевых буях - по радиоканалу;
6. Решение с помощью специального программного обеспечения оптимизационной задачи о пространственном положении сети транспондеров на основе минимизации функционала невязок между искомыми и измеренными расстояниями между транспондерами с учетом жесткой привязки сети к положению транспондеров на начальных и концевых буях.
Техническим результатом изобретения является повышение точности и стабильности определения пространственного положения буксируемых сейсмокос при проведении сейсморазведочных работ, что в конечном итоге позволяет получить данные о структуре морского дна с более высоким разрешением.
Технический результат достигается за счет ряда разработанных технических решений, сгруппированных в 3 блока (оригинальные способы генерации (1) и детектирования акустических сигналов (2), а также эффективный способ решения оптимизационной задачи о пространственном положении сети транспондеров на основе минимизации функционала невязки с дополнительными условиями регуляризации (3)), а именно:
1. На этапе излучения и приема акустических сигналов сетью транспондеров, техническое решение, отличающееся тем, что дополнительно включает:
- циклическое или управляемое излучение последовательности коротких тоновых сигналов, называемых буквами, и формированием слов из этих букв, как их строго упорядоченных во времени последовательностей.
- излучение коротких тоновых сигналов производится на ограниченном наборе (~8÷16) несущих частот из диапазона 40-80 кГц;
- длительность отдельного тонового сигнала (буквы) может меняться, составляя, например 1÷2 мс;
- между различными тоновыми сигналами могут быть пустые интервалы (задержки) любой, но заранее предписанной длительности;
- количество букв в словах и интервалы между буквами могут быть различными;
- слова, излучаемые разными транспондерами, выбираются так, чтобы в группе транспондеров, находящихся в зоне взаимной слышимости, они были максимально ортогональными;
Данное техническое решение позволяет избавиться от жестких требований к временным окнам для выделения сигналов при большом количестве одновременно работающих транспондеров и относительно малом числе частотных каналов, поскольку позволяет легко выделять искомый сигнал из одновременно приходящих других сигналов, состоящих возможно из тех же частотных компонент, но излучаемых в другой последовательности. Предлагаемый способ кодирования сигналов отличается от прототипа и аналогов и позволяет использовать ограниченный набор частот для формирования сигналов в условиях одновременного излучения большого числа транспондеров.
2. На этапе обработки принятых акустических сигналов процессорами в транспондерах, техническое решение, отличающееся тем, что дополнительно включает:
- фильтрацию регистрируемых сигналов набором полосовых фильтров, соответствующих частотам излучаемых тоновых сигналов;
- фильтрация осуществляется аппаратным образом, заменяя более трудоемкую цифровую корреляционную обработку;
- определение огибающей отфильтрованных полосовыми фильтрами зарегистрированных сигналов;
- выделение широких, робастных временных интервалов (окон), в которых производится идентификация требуемых сигналов (слов);
- идентификация требуемых слов осуществляется по критерию превышения определенного порога произведений огибающих тоновых сигналов, сдвинутых на время задержки последовательности букв в слове.
- время, соответствующее максимуму произведения огибающих тоновых сигналов, превышающих заданный порог, принимается в качестве времени прохождения сигналов между транспондерами, называемого задержкой.
Данное техническое решение позволяет простым, не затратным способом определять задержки между сигналами, излучаемыми одновременно большим числом транспондеров при ограниченном числе частотных каналов. В отличие от прототипа и аналогов, этот способ детектирования позволяет использовать широкие временные окна и измерять одновременно большое количество временных задержек (до нескольких десятков), поскольку количество сигналов, которые таким способом можно детектировать и различить, существенно больше, чем при использовании сигналов сложной формы или сигналов одной несущей частоты со сложной огибающей.
Другим преимуществом предложенного способа детектирования являются уменьшение требуемых ресурсов процессора при вычислении ресурсоемких операций корреляций, поскольку вместо корреляции используется простая фильтрация, которая производится на аппаратном уровне одновременно на всем наборе полосовых частотных фильтров. Таким образом, процессор транспондера может одновременно детектировать десятки сигналов за время, необходимое для выполнения одной корреляции. Кроме того, нет необходимости хранить в памяти процессора все детектируемые сигналы. Вместо этого нужно хранить лишь их короткие коды (слова).
3. На этапе решения оптимизационной задачи о пространственном положении сети транспондеров техническое решение, отличающееся тем, что дополнительно включает:
- определение набора валидных задержек, при этом считаются валидными и принимаются в расчетах лишь те временные задержки между транспондерами, разность между которыми на встречных направлениях не превышает заданной погрешности, при этом валидная задержка определяется как полусумма задержек на встречных направлениях;
- преобразование времени прохождения сигнала в расстояние между идентифицированными транспондерами производится умножением времени валидной задержки на скорость звука в воде, при этом для оценки скорости звука в воде может браться величина, получаемая от деления известной длины между парами ближайших транспондеров на одной и той же сейсмокосе к валидному времени прохождения сигнала между ними;
- совокупность одновременно измеренных валидных расстояний между транспондерами позволяет построить сеть и поставить задачу определения координат всех узлов сети, на основе минимизации целевого функционала невязки.
- формирование целевого функционала в форме невязки между искомыми и измеренными (валидными) расстояниями сети транспондеров с начальным приближением, полученным из проектного расположения или из предыдущего цикла измерений;
- учет в целевом функционале информации о заглублении транспондеров, передаваемой от них на борт по линиям связи в сейсмокосах;
- учет в целевом функционале в виде регуляризирующих слагаемых информации о координатах транспондеров, размещенных на концевых буях, пневмопушках, параванах, которая передается на борт от размещенных на них же GPS/ГЛОНАСС приемников по радиоканалу;
- учет в целевом функционале в виде регуляризирующих слагаемых информации о длине кабельных связей между транспондерами вдоль сейсмокос;
- минимизация нелинейного целевого функционала на основе метода Ньютона-Рафсона и метода сопряженных градиентов для определения пространственного положения сети транспондеров, и следовательно, пространственного положения сейсмокос, включая изменения положения в результате их движения, изгиба и схождения-расхождения;
- контроль точности получаемого решения для каждого узла сети на основе оценки средней невязки, определяемой как среднее от невязок всех валидных расстояний от данного узла сети до других узлов.
Данное техническое решение повышает достоверность исходных данных, используемых для решения оптимизационной задачи о пространственном положении сети транспондеров, известную в геодезии как задача уравнивания сети, за счет использования только валидных расстояний между транспондерами. Кроме того, в рамках единого подхода при формировании целевого функционала используется дополнительная информация о координатах транспондеров на начальных и концевых буях, об индивидуальном заглублении транспондеров, длине кабельных связей и локальной скорости звука. Итерационные шаги Ньютона-Рафсона обеспечивают высокую скорость сходимости и, следовательно, уменьшают время решения задачи, а использование метода сопряженных градиентов, позволяет регуляризировать процесс сходимости и получить решение даже в случае неудачного начального приближения, когда метод Ньютона-Рафсона неустойчив. Таким образом, в совокупности повышается эффективность получаемого решения, обеспечивая его более высокую производительность, точность и устойчивость, а также контроль этой точности.
Список использованных источников
1. US20050180263A1 Gps-based underwater cable positioning system (авторы Dale Lambert, Robert Rouquette, Daniel Seale, Clem Guillot владелец Ion Geophysical Corp от 2002-05-23 до 2024-05-06)
2. US5031159A Hydroacoustic ranging system (автор Robert E. Rouquette владелец DIGICOURSE Inc, Ion Geophysical Corp от 1990-02-21 до 2010-02-21)
3. US5321668A Hydroacoustic ranging method using bottom reflections (автор Robert E. Rouquette владелец DIGICOURSE Inc, Ion Geophysical Corp от 1990-02-21 до 2010-02-21)
4. US20190377099A1 Acoustic ranging apparatus and methods (автор Clement B. Guillot, III, владелец Ion Geophysical Corp, от 2015-10-09 до 2036-11-21)
5. US5359575A Underwater pulse tracking system (авторы Ross E. Williams, Bryant G. Ragan, Robert H. Kemp, Jr., владельцы DIGICOURSE Inc, Ion Geophysical Corp от 1993-09-08 до 2013-09-08)
6. RU2739336C2 "Определение положения сейсмического оборудования в буксируемой морской группе" (авторы Годей, Эрик (NO), Уинфилд, Гэри (АЕ) владельцы Годей, Эрик (NO), ПОЛАРКУС ДиЭмСиСи (АЕ) от 2017-10-02)
7. US20130258807A1 Methods and apparatus for node positioning during seismic survey (автор Michael B. ERNELAND, владелец PGS Geophysical AS от 2012-03-27 до 2034-08-21)
8. US7376045B2 System and method for determining positions of towed marine seismic streamers (авторы Jon Falkenberg, Nils Lunde, Per Birger Gunnarsson, Nils Gunnar Olof Kröling, Stig Rune Lennart Tenghamn владелец PGS Geophysical AS от 2005-10-21 до 2025-10-21)
Способ передачи информации в цифровой системе связи с шумоподобными сигналами
Способ помехоустойчивого кодирования и декодирования подлежащих передаче цифровых данных
Способ приема цифрового сообщения в целом в условиях многолучевого распространения
Способ приема сигналов в системе цифровой связи с компенсацией помех, обусловленных многолучевой интерференцией
Способ передачи информации в системах связи с шумоподобными сигналами
Способ передачи информации в системе связи с шумоподобными сигналами
Способ передачи и приема цифровой информации в целом
Способ определения структуры гидроакустического поля техногенных подводных объектов от вибраций корпуса под действием динамических сил
Способ определения структуры гидроакустического поля техногенных подводных объектов от воздушного шума внутри корпуса
Способ приема цифровой информации при наличии межсимвольной интерференции
Способ определения параметров системы трещин гидроразрыва
Устройство для укладки сейсмокос на морское дно для сейсмоакустического мониторинга
Донная кабельная антенна для мониторинга сейсмоакустической эмиссии на шельфе
Гидроакустическая система для позиционирования
Способ транспортировки высоковязких нефтепродуктов по трубопроводу
Способ определения местоположения бурового инструмента в процессе бурения
Буксируемое устройство для измерения акустических характеристик морского грунта
Геофизический комплекс для мониторинга и морской сейсморазведки
Способ сейсмического мониторинга процесса освоения месторождения углеводородов на акваториях
Устройство для интенсификации перекачки тяжелых нефтей по трубопроводам

