Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предполагаемое изобретение относится к электротехнике и может быть использовано для управления электромагнитными клапанами (ЭМК).
Известны различные способы управления ЭМК. Например, в [1] описаны способ и устройство, в котором осуществляется регулирование тока в обмотке катушки для управления работой ЭМК. Приведенные в [1] на FIG. 8 и FIG. 9 алгоритмы требуют для своей реализации контроля сразу трех параметров - напряжения на обмотке, тока протекающего через нее и ее сопротивления, что значительно усложняет схему управляющего устройства и предъявляет высокие требования к его вычислительным ресурсам. Кроме того, приведенные в [1] на FIG. 1, 3, 5, 6 схемы вариантов построения силового каскада управления не позволяют регулировать ток в обмотке при выключении ЭМК, так как в этом состоянии схемы ток не будет протекать через датчик тока.
Проблема регулирования тока при выключении ЭМК для схем управления с одним силовым ключом может быть решена переносом датчика тока в цепь обмотки ЭМК и охвата его цепью возврата энергии источнику питания, например, с использованием диода, как показано в [2] на FIG. 1 и FIG. 7. Подобное решение предполагает использование усилителя с высоким допустимым значением синфазного напряжения на его входе и одновременно с высоким значением коэффициента подавления синфазной помехи, величина которой для схемы, приведенной в [2] на FIG. 7, в этом случае может превышать Vbat (напряжение питания ЭМК), что сильно ограничивает возможности по выбору усилителя.
В схемах управления ЭМК с тремя силовыми ключами, использующими дополнительный источник форсирующего напряжения, (см. [3] и [4]) применяется датчик тока, включенный относительно нулевого (общего) потенциала. Это позволяет решить проблему с использованием синфазного напряжения, но не позволяет измерять ток во время отключения ЭМК.
Известен также способ управления ЭМК и устройство для его осуществления, описанные в [5]. Этот способ управления ЭМК включает измерение напряжения на ЭМК и тока через него, а также использование результатов этих измерений в качестве вспомогательного средства для управления ЭМК. Например, измерения одного или обоих этих параметров могут использоваться для определения момента фактического включения электромагнитного клапана. Характерные изменения тока ЭМК возникающие при срабатывании и отпускании ЭМК приведены в [5] на FIG. 7 и FIG. 8. Однако включение измерительного резистора (Sense Resistor) (52) над нижним ключом (24) (см. схему на FIG. 1 в описании [5]) предполагает использование усилителя с высоким допустимым значением синфазного напряжения на входе аналогично приведенному в [2] на FIG. 7.
Наиболее близким к предлагаемому техническому решению является способ управления ЭМК и устройство для его осуществления, защищенные патентом [6]. Это техническое решение позволяет с высокой надежностью обеспечивать точное значение времени включенного состояния ЭМК и контролировать факты срабатывания и отпускания электромагнита (ЭМ) клапана, а также повысить эффективность использования энергии источника питания за счет отсутствия ее потребления практически сразу после срабатывания ЭМК и возвращения источнику питания части энергии, запасенной в обмотке ЭМ при его срабатывании.
В [6] предполагается использование двухключевой полумостовой схемы управления, а время включенного состояния клапана определяется как отрезок времени от момента начала движения якоря ЭМ при срабатывании до момента достижения якорем ЭМ конечного положения при отпускании. Снятие напряжения с обмотки электромагнита для обеспечения отпускания клапана производится в два этапа: сначала после проверки достижения локального максимума тока в обмотке ЭМ клапана при срабатывании отключают его обмотку от положительного вывода источника питания, размыкая верхний ключ и формируя цепь медленной рекуперации магнитной энергии электромагнита, а затем отключают обмотку ЭМ от отрицательного вывода источника питания, размыкая нижний ключ и формируя цепь быстрой рекуперации магнитной энергии. Управление временем включенного состояния клапана обеспечивают, изменяя временную задержку между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа).
При этом, определение момента начала движения якоря ЭМ производится при достижении локального максимума тока в обмотке ЭМ клапана при срабатывании, а определение момента достижения якорем ЭМ конечного положения при отпускании производится при достижении локального максимума тока в обмотке ЭМ клапана в процессе отпускания.
Одним из путей снижения аппаратных задержек для повышения быстродействия работы ЭМК является уменьшение интервала времени от момента подачи напряжения питания на обмотку ЭМ до начала движения якоря за счет увеличения напряжения питания. Экспериментально установлено, что увеличение напряжения питания приводит к уменьшению величины локального максимума тока в обмотке ЭМ клапана в процессе отпускания. А при достижении некоторого порогового значения напряжения питания ток в обмотке ЭМ клапана при отпускании вообще не достигает локального максимума. В этом случае пропадает электрический сигнал, по которому определялся момент достижения якорем ЭМ конечного положения при отпускании, и способ управления ЭМК по патенту [6] при дальнейшем увеличении напряжения питания ЭМ теряет работоспособность.
Задачей предполагаемого изобретения является расширение функциональных возможностей при повышении напряжения питания ЭМ клапана и снижение аппаратных задержек.
Решение этой задачи достигается тем, что при включении ЭМК осуществляют однократное измерение напряжения на верхнем выводе обмотки ЭМ, устанавливают первое и второе пороговые значения напряжения на верхнем выводе обмотки ЭМ, и, если величина измеренного напряжения выше первого порогового значения, производят мониторинг напряжения на верхнем выводе обмотки ЭМ и при достижении локального максимума напряжения на верхнем выводе обмотки ЭМ, превышающего второе пороговое значение, определяют момент достижения якорем ЭМ конечного положения при отпускании.
Проверку достижения локального максимума напряжения на верхнем выводе обмотки ЭМ клапана при отпускании осуществляют, например, путем сравнения текущего измеренного значения напряжения верхнем выводе обмотки с предыдущим и, если для трех последовательных измерений напряжения текущее измеренное значение меньше предыдущего, то считают, что локальный максимум напряжения достигнут.
При необходимости полученное в текущем цикле работы время включенного состояния клапана передают по запросу системе верхнего уровня.
Требуемое в следующем рабочем цикле значение времени включенного состояния клапана может передаваться от системы верхнего уровня до поступления команды на включение клапана.
В случае цифровой реализации предлагаемого способа управления ЭМК с использованием микроконтроллера, удобно весь диапазон регулирования времени включенного состояния клапана от минимально возможного (при одновременном размыкании верхнего и нижнего ключей) до максимально возможного (при размыкании только верхнего ключа) разбить на фиксированное количество равных временных интервалов. Границе каждого временного интервала поставить в соответствие величину временной задержки между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа), при реализации которой в процессе работы клапана достигается значение времени включенного состояния клапана, соответствующее установленной величине указанной временной задержки. При проведении лабораторных или заводских испытаний ЭМ клапана формируют таблицу, связывающую дискретные значения границы каждого установленного временного интервала и соответствующей ей величиной указанной временной задержки. Эту таблицу запоминают и используют при формировании значения устанавливаемой в текущем рабочем цикле клапана указанной временной задержки для обеспечения требуемого значения времени включенного состояния клапана в данном цикле его работы.
При работе по значению требуемого в следующем рабочем цикле времени включенного состояния клапана выбирают из запомненной таблицы ближайшее к нему дискретное значение границы установленного временного интервала и соответствующую ему величину временной задержки между моментами размыкания верхнего и нижнего ключей реализуют в следующем рабочем цикле клапана.
Поскольку вычислительные ресурсы системы верхнего уровня значительно больше, чем у устройства управления ЭМК, то решение задачи формирования значения устанавливаемой в текущем рабочем цикле клапана временной задержки между размыканием верхнего ключа и размыканием нижнего ключа может быть выполнено системой верхнего уровня. И тогда требуемая в следующем рабочем цикле величина временной задержки между моментами размыкания верхнего и нижнего ключей передается в устройство управления ЭМК от системы верхнего уровня до получения команды на включение клапана.
Для решения поставленной задачи предполагаемого изобретения в устройство, выполненное на базе микроконтроллера PICT 6F1778, дополнительно введен измеритель напряжения, измерительный вход которого соединен с первым выводом электромагнита клапана, а управляющий вход с выводом 12 микроконтроллера, вывод 6 которого соединен с выходом измерителя напряжения. Причем выход инвертирующего усилителя соединен с выводом 5 микроконтроллера, выводы 2 и 3 которого соединены между собой.
Сущность предлагаемого технического решения поясняется чертежами.
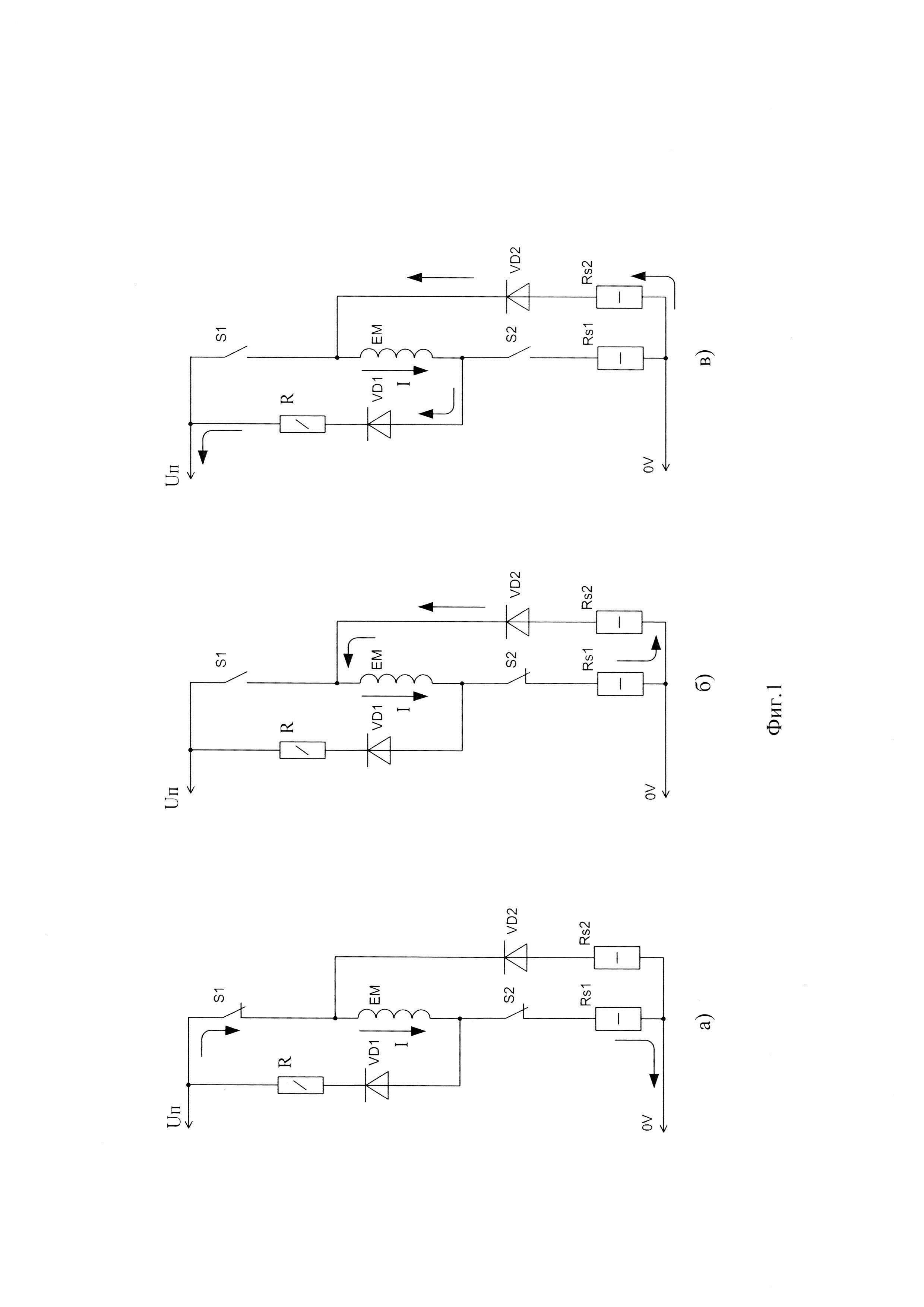
Фиг. 1. Варианты протекания тока в обмотке ЭМ клапана при разном возможном состоянии коммутации верхнего и нижнего ключей в используемой полумостовой схеме управления.
Фиг. 2. Экспериментальные переходные процессы изменения тока в обмотке ЭМ, напряжения на верхнем выводе обмотки и выходного сигнала акселерометра, жестко связанного с якорем, при значении напряжения питания 25 В для одного цикла работы ЭМ.
Фиг. 3. Экспериментальные переходные процессы изменения тока в обмотке ЭМ, напряжения на верхнем выводе обмотки и выходного сигнала акселерометра, жестко связанного с якорем, при значении напряжения питания 40 В для одного цикла работы ЭМ.
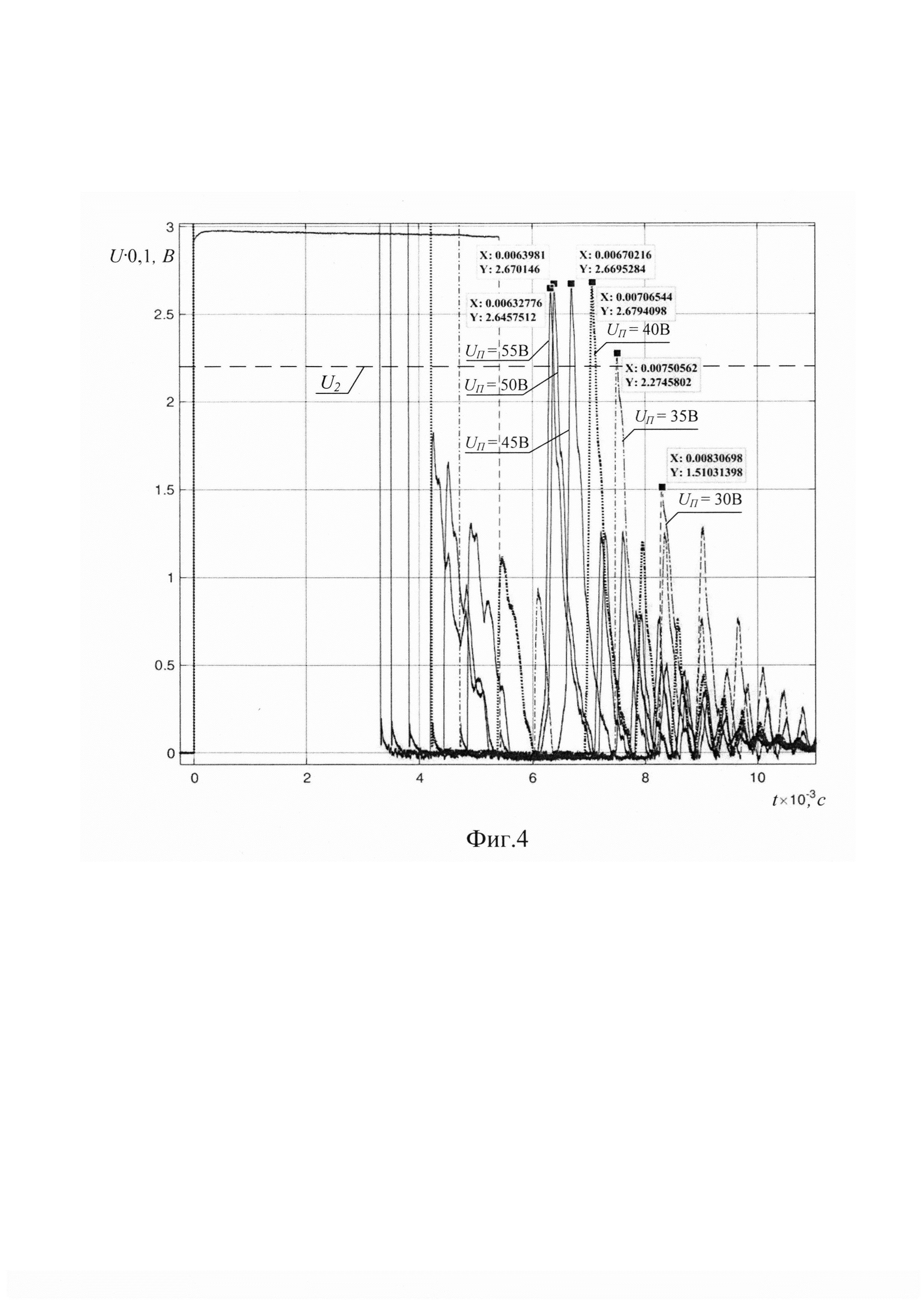
Фиг. 4. Семейство экспериментальных переходных процессов изменения напряжения на верхнем выводе обмотки ЭМ для разных значений напряжения питания.
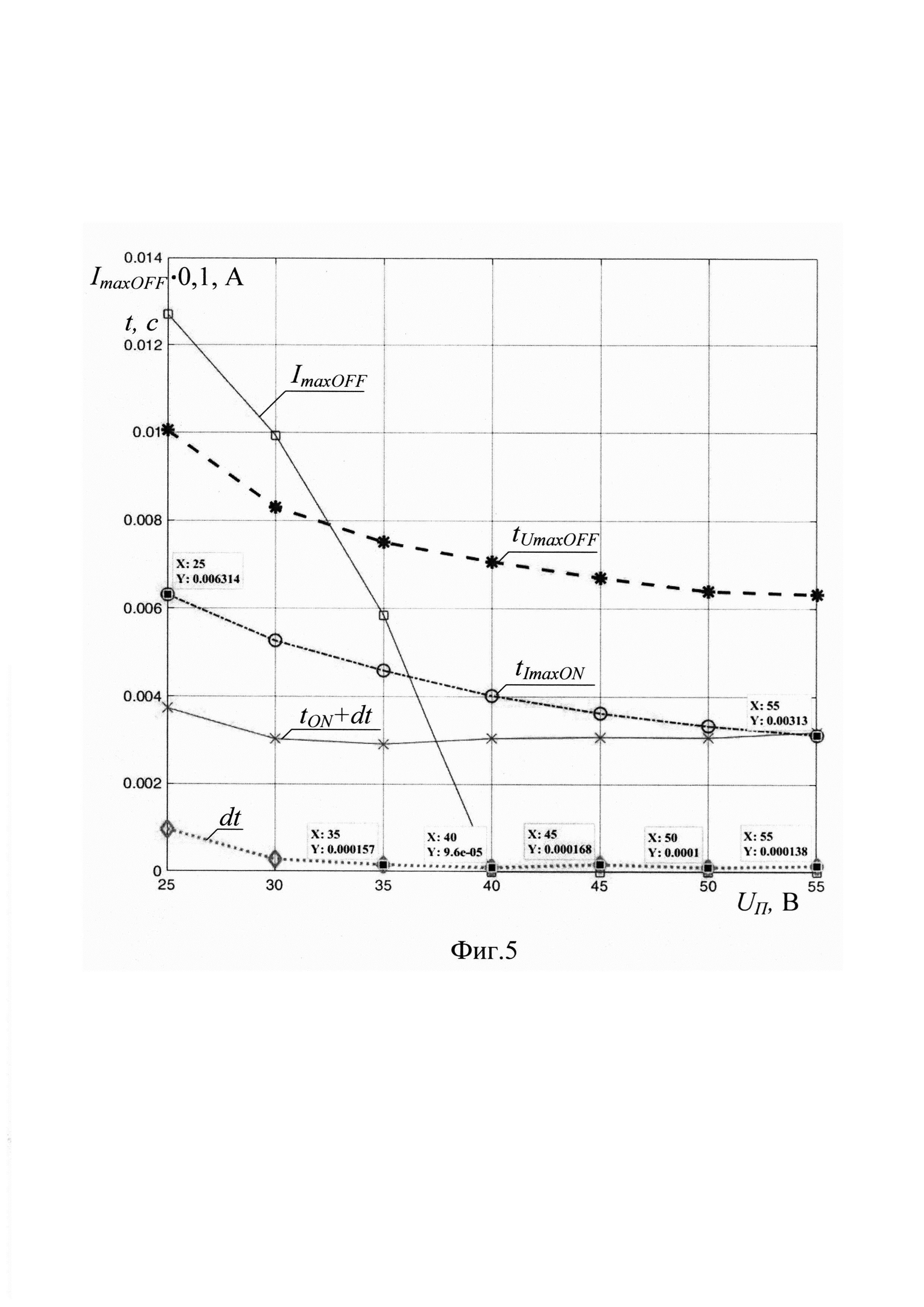
Фиг. 5. Экспериментальные зависимости от напряжения питания величины локального максимума тока в обмотке ЭМ клапана в процессе отпускания и временных интервалов, характеризующих состояние клапана в текущем цикле его работы.
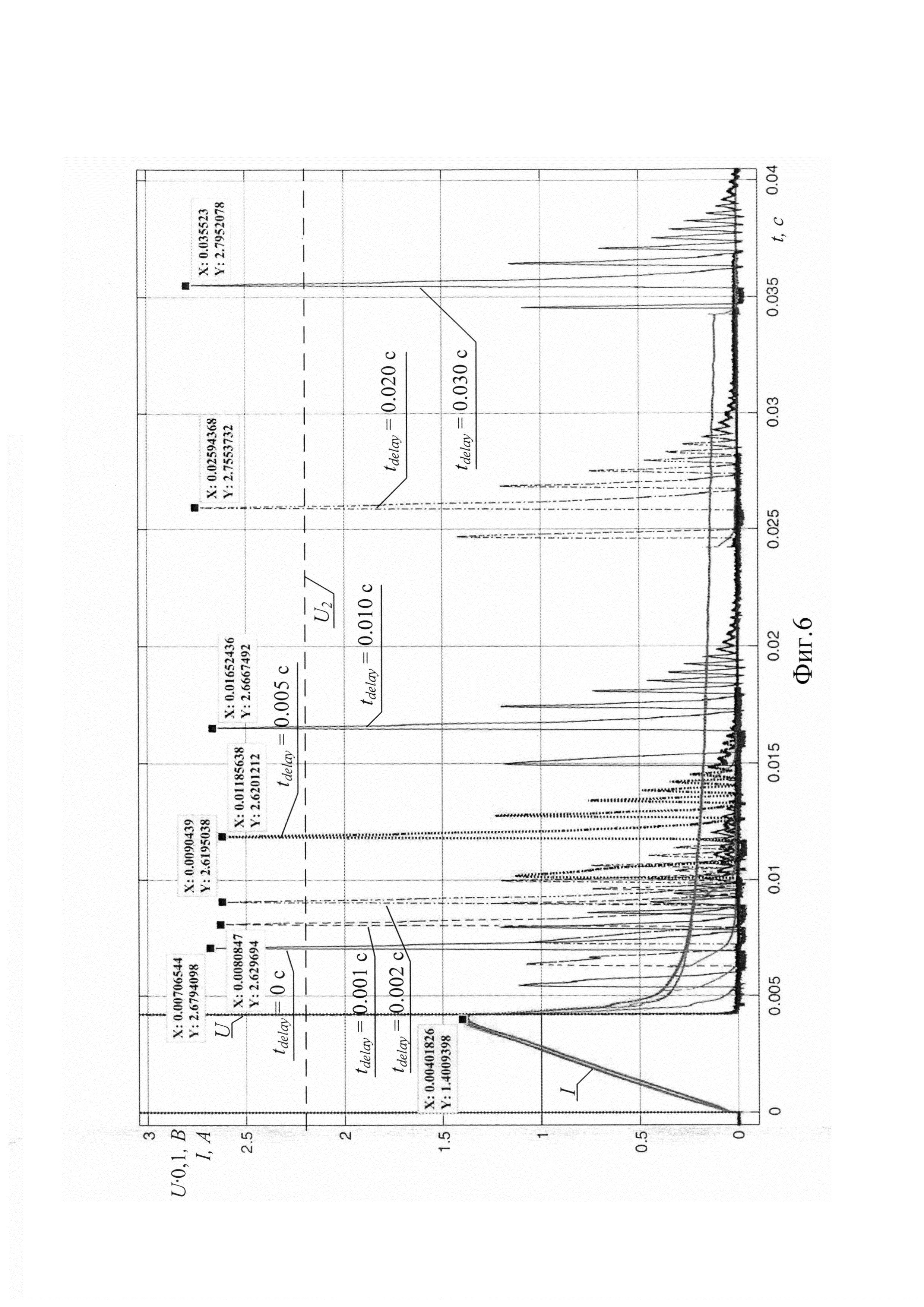
Фиг. 6. Семейство экспериментальных переходных процессов изменения тока в обмотке ЭМ и напряжения на верхнем выводе обмотки ЭМ для разных значений задержки tdelay между размыканием верхнего и нижнего ключей при напряжении питания UП=40 В.
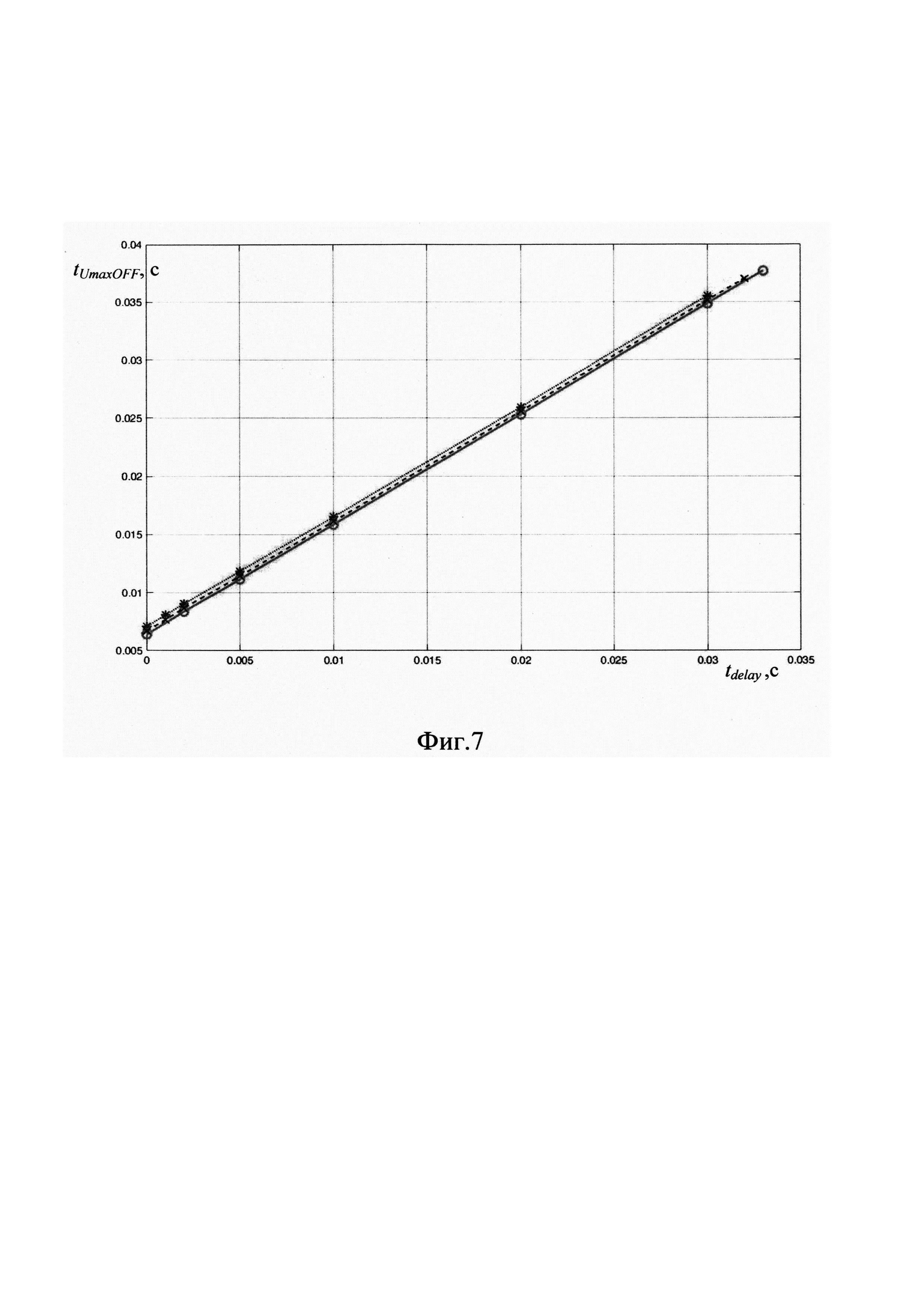
Фиг. 7. Экспериментальные зависимости времени достижения локального максимума напряжения на верхнем выводе обмотки tumaxOFF от задержки tdelay между размыканием верхнего и нижнего ключей.
Фиг. 8. Экспериментальные зависимости времени достижения локального максимума напряжения на верхнем выводе обмотки tUmaxOFF от задержки tdelay между размыканием верхнего и нижнего ключей.
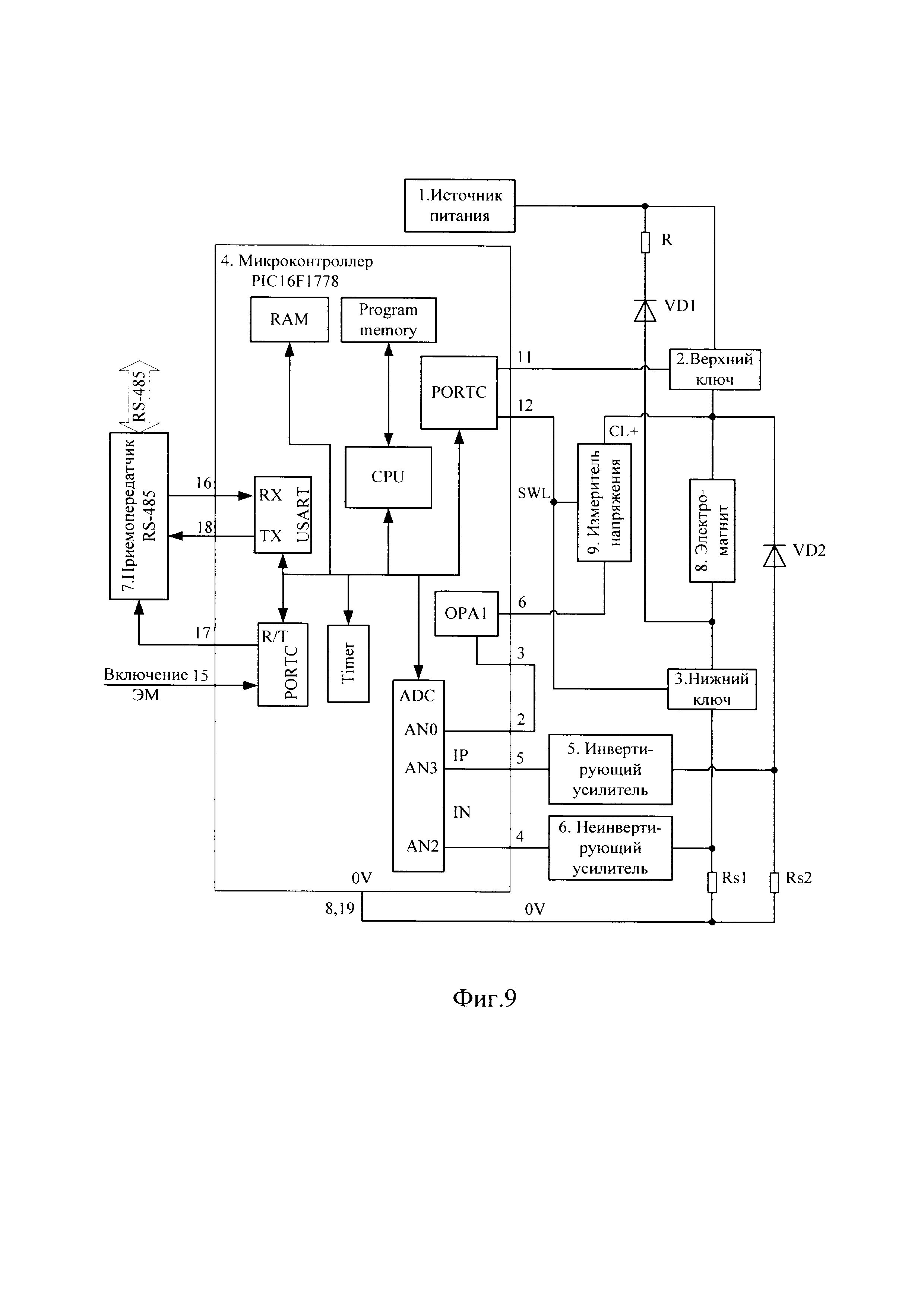
Фиг. 9. Функциональная схема устройства для управления электромагнитным клапаном.
Фиг. 10. Принципиальная схема возможного исполнения измерителя напряжения.
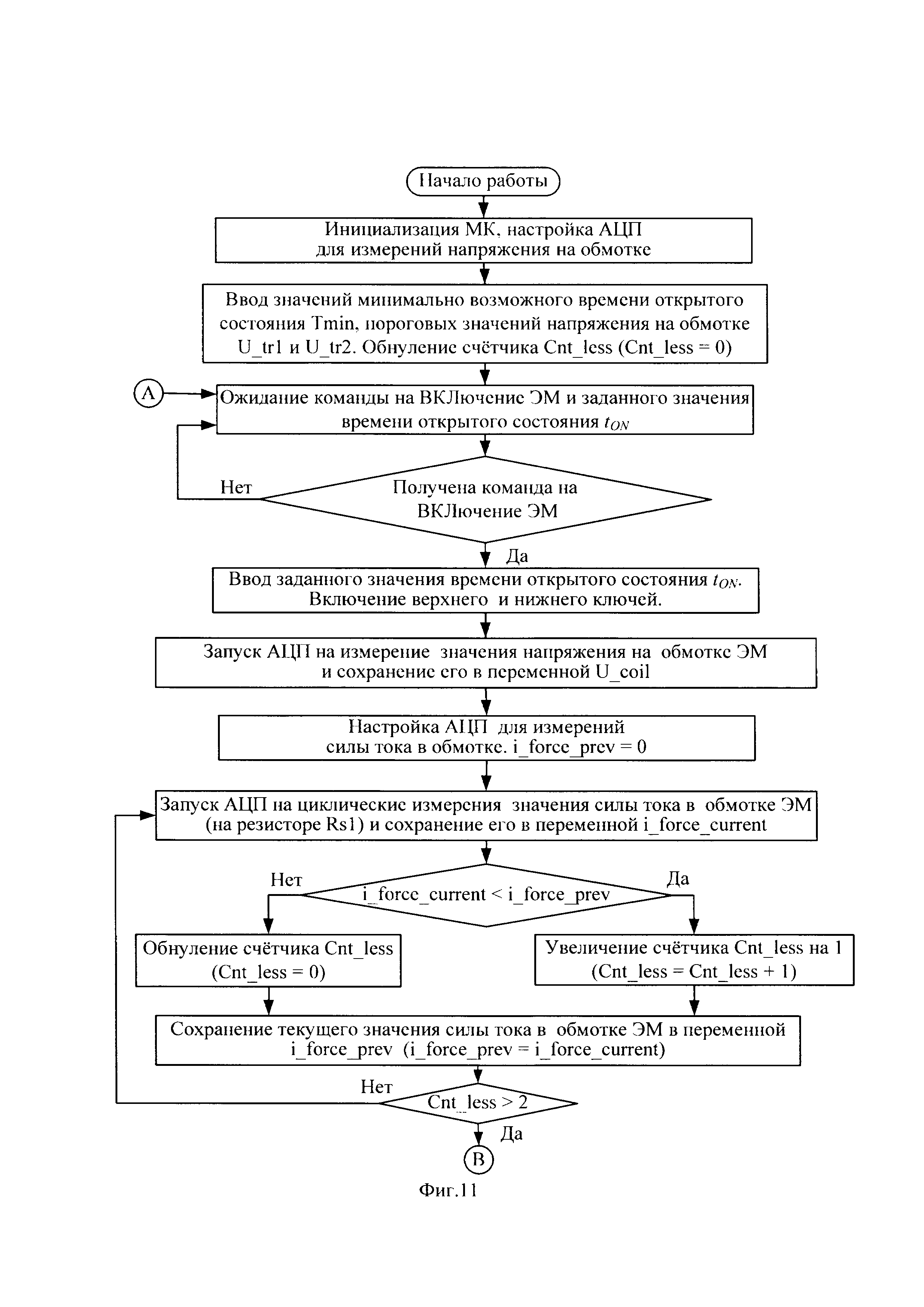
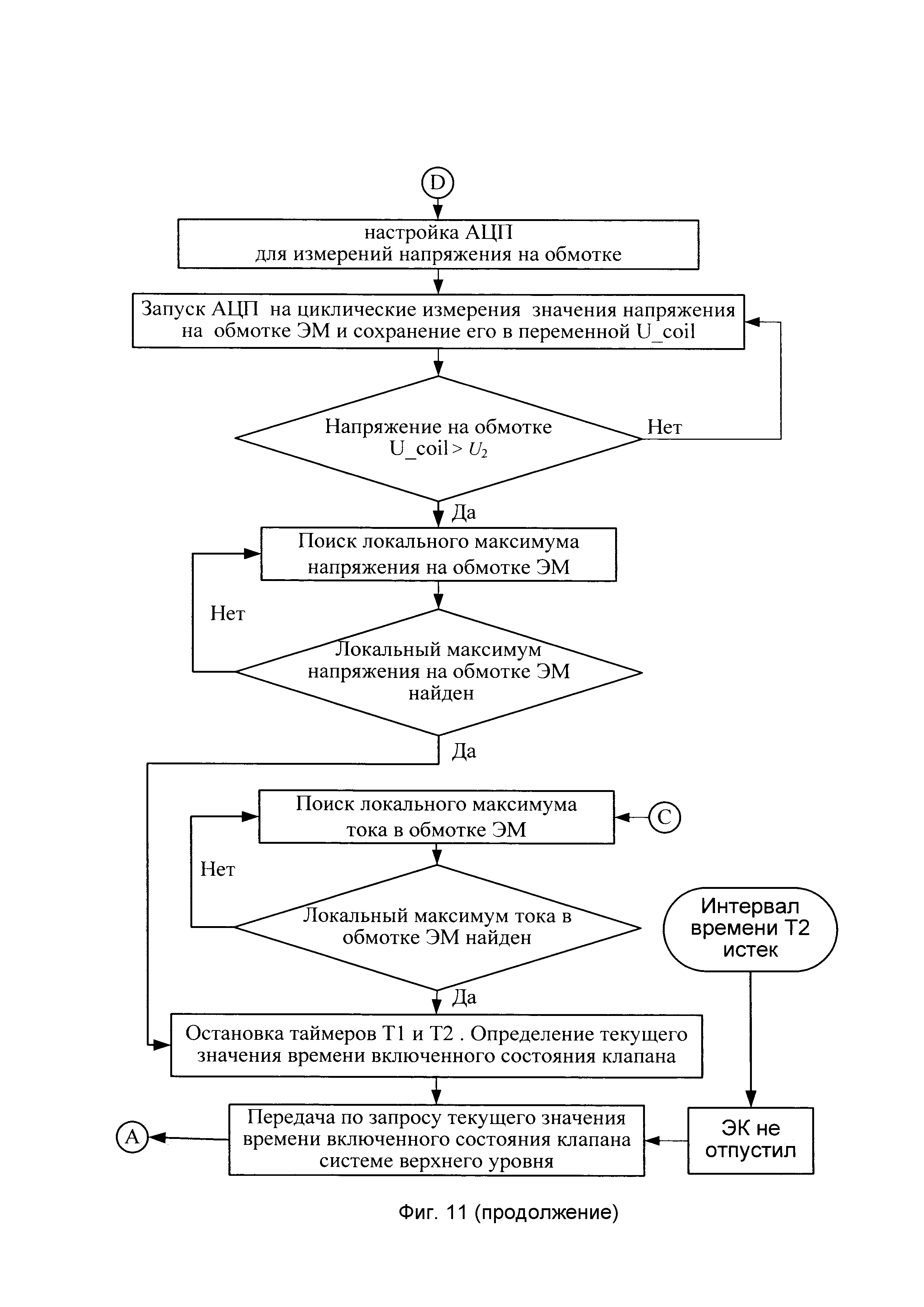
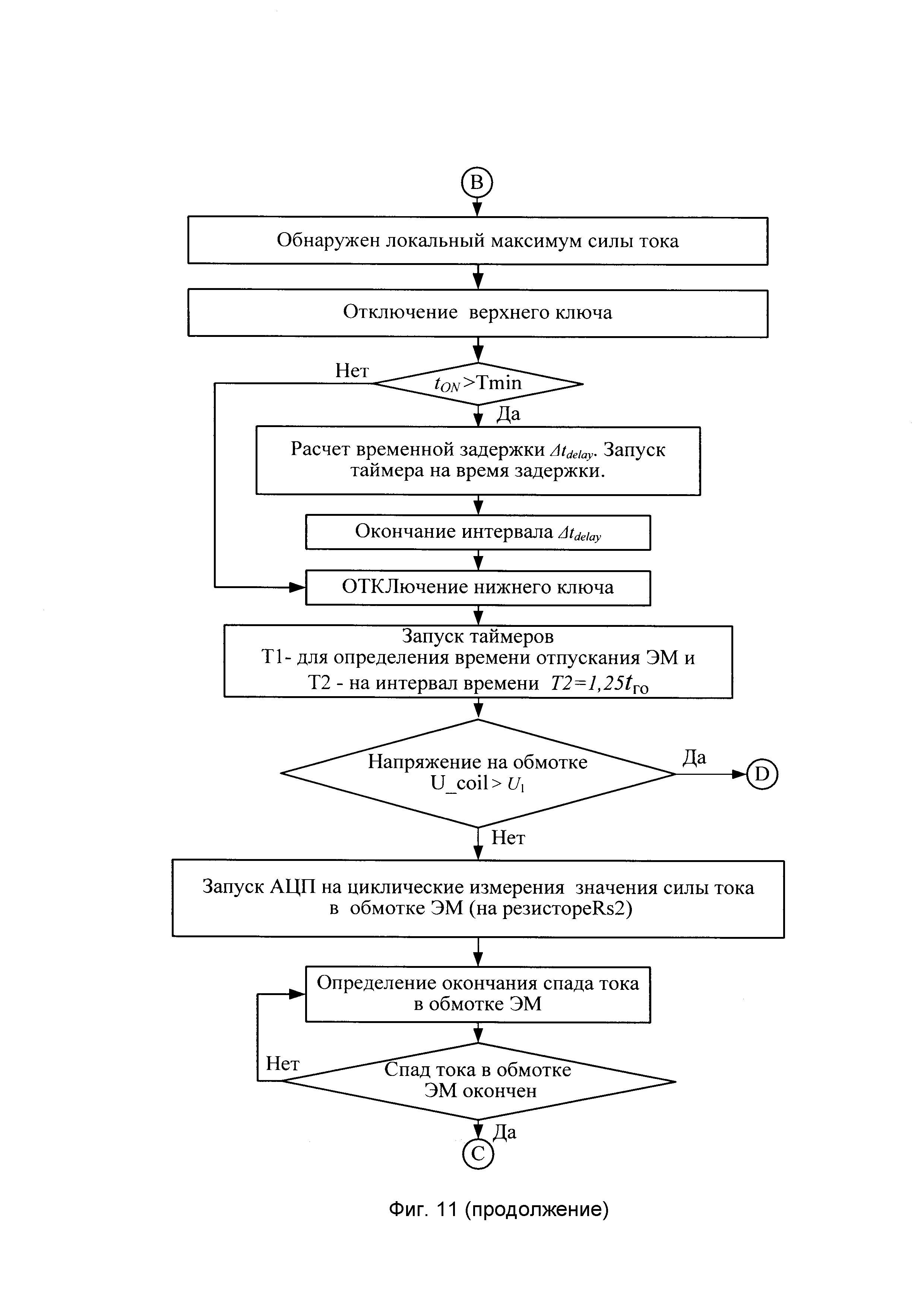
Фиг. 11. Блок-схема возможного алгоритма, реализуемого при работе устройства.
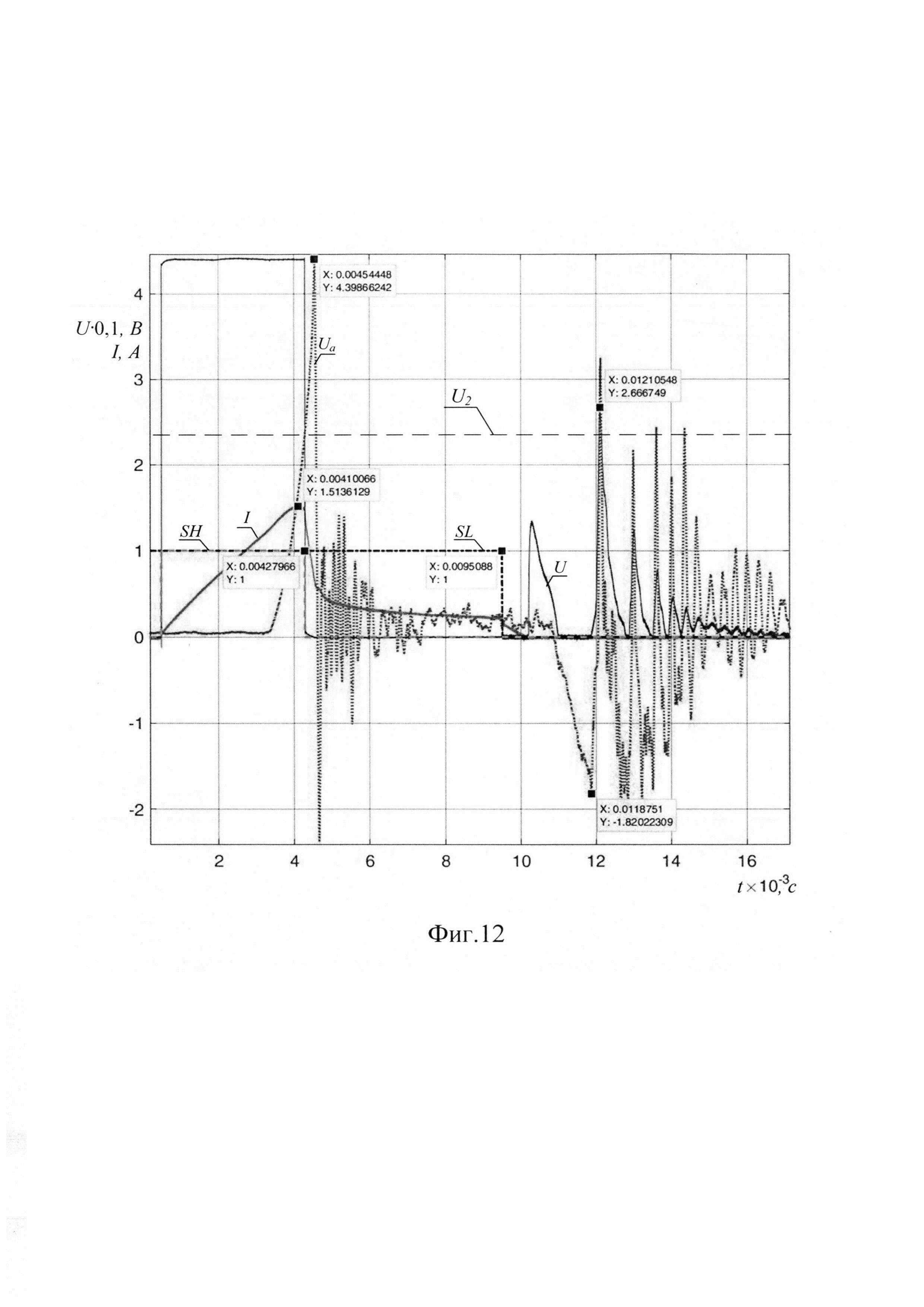
Фиг. 12. Экспериментальные переходные процессы изменения тока в обмотке ЭМ, напряжения на верхнем выводе обмотки и выходного сигнала акселерометра, жестко связанного с якорем, при значении напряжения питания 40 В для одного цикла работы ЭМ.
Для предлагаемого способа (также как и способа-прототипа, описанного в [6]) располагаемый диапазон регулирования времени включенного состояния ЭМК находится в жестких пределах.
Минимально возможное время включенного состояния достигается, когда при срабатывании после начала движения якоря ЭМ после достижения локального максимума тока в обмотке ЭМ клапана, сразу размыкают верхний и нижний ключи в цепи питания обмотки ЭМ (отключают его обмотку от положительного и отрицательного выводов источника питания одновременно) и формируют цепь быстрой рекуперации магнитной энергии, которая обеспечивает возврат накопленной энергии в источник питания (см. фиг. 1, в).
Максимально возможное время включенного состояния достигается, когда при срабатывании после начала движения якоря ЭМ после достижения локального максимума тока в обмотке ЭМ клапана, размыкают верхний ключ в цепи питания обмотки ЭМ (отключают его обмотку только от положительного вывода источника питания) и формируют цепь медленной рекуперации магнитной энергии ЭМ (см. фиг. 1, б), в процессе протекания тока по которой эта накопленная энергия выделяется в виде тепла на активном сопротивлении этой цепи. При этом процесс затухания тока в обмотке ЭМ происходит существенно медленнее, чем в цепи быстрой рекуперации магнитной энергии.
Для регулирования времени включенного состояния клапана в пределах от минимально возможного до максимально возможного при использовании полумостовой схемы управления после размыкания верхнего ключа обеспечивают необходимую временную задержку, после чего размыкают нижний ключ. Такая последовательность операций позволяет достигнуть любой величины времени включенного состояния клапана в пределах от минимально возможного до максимально возможного.
Экспериментально установлено, что для ЭМК, использующего втяжной электромагнит с дисковым якорем, зависимость между временем включенного состояния ЭМК toN и задержкой tdelay между размыканием верхнего и нижнего ключей носит практически линейный характер. Тогда величина требуемой задержки для обеспечения заданного значения времени включенного состояния ЭМК из области допустимых значений может быть описана соотношением:

где tON_min - минимально возможное время включенного состояния клапана, которое достигается при одновременном отключении обмотки электромагнита от положительного и отрицательного выводов источника питания (одновременном размыкании верхнего и нижнего ключей) в момент начала движения якоря электромагнита;
k - постоянный коэффициент, определяемый при проведении заводских или лабораторных испытаний каждого экземпляра ЭМ.
При этом

где ton_max - максимально возможное время включенного состояния клапана, которое достигается при отключении обмотки электромагнита только от положительного вывода источника питания (размыкании только верхнего ключа) в момент начала движения якоря электромагнита;
tdelay_max - максимальная реализуемая задержка между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа). Задержка tdelay_max приводит к достижению максимально возможного времени включенного состояния клапана, когда дальнейшее увеличение задержки уже не влияет на время включенного состояния клапана.
Разработка предлагаемых способа и устройства проводилась с использованием результатов лабораторных испытаний применяемого в составе ЭМК дискового ЭМ втяжного типа, имеющегося в распоряжении авторов.
На фиг. 2 приведены зарегистрированные в одном рабочем цикле экспериментальные переходные процессы изменения напряжения на верхнем выводе обмотки ЭМ U (сплошная линия), тока в обмотке I (штриховая линия) и сигнала Ua (пунктирная линия) с выхода акселерометра, жестко связанного с якорем ЭМ и имеющего ось чувствительности, направление которой совпадает с направлением перемещения якоря.
Сигнал с выхода такого акселерометра является признанной (см. описание патента [7]), достаточно объективной и не зависимой от электрических параметров обмотки характеристикой движения якоря ЭМ. Использование этого сигнала при лабораторных испытаниях позволяет более полно анализировать и оценивать результаты функционирования ЭМ клапана по текущим измерениям его основных электрических параметров обмотки ЭМ - напряжения и тока.
Экспериментальные исследования показали, что к моменту достижения током в обмотке ЭМ локального максимума при срабатывании, якорь развивает скорость около 12% от ее максимального значения (которое наблюдается в момент удара якоря о стоп) и успевает переместиться на расстояние порядка 7-8% от величины начального зазора. Это позволяет считать момент достижения током в обмотке ЭМ локального максимума при срабатывании достаточной для практического использования характеристикой начала движения якоря ЭМ. Момент удара якоря о механическое препятствие сопровождается резкой сменой направления изменения его ускорения и служит объективной характеристикой преодоления якорем полной величины начального зазора. В процессе отпускания ЭМ момент удара якоря о седло клапана также хорошо определяется по выходному сигналу акселерометра. И, как видно из приведенных на фиг. 2 осциллограмм, момент достижения локального максимума током при отпускании и момент удара якоря о седло клапана практически совпадают. Разница между этими моментами времени, как показали экспериментальные исследования, составляет менее 20 мкс (в разных условиях работы ЭМК, а при повышении напряжения питания она уменьшается), и ею можно пренебречь при оценке времени открытого состояния ЭМК, минимально возможное значение которого превышает 3 мс. Поэтому момент достижения локального максимума тока в обмотке ЭМ при отпускании в [6] принято считать моментом закрытия ЭМК. Результаты, приведенные на фиг. 2, получены при значении напряжения питания 25 В.
Как уже отмечалось, увеличение напряжения питания приводит к уменьшению величины локального максимума тока в обмотке ЭМ клапана в процессе отпускания. И при достижении некоторого порогового значения напряжения питания ток в обмотке ЭМ клапана при отпускании вообще не имеет локального максимума, это происходит потому, что величина напряжения питания превосходит величину ЭДС самоиндукции, возникающей в обмотке из-за движения якоря. Движение якоря ЭМ при отпускании определяется, в основном, силой возвратной пружины, которая не зависит от напряжения питания. В этом случае пропадает электрический сигнал, по которому определялся момент достижения якорем ЭМ конечного положения при отпускании, а вместе с ним возможность оценивания времени открытого состояния ЭМК и, следовательно, возможность его регулирования. В результате требуется найти другой электрический сигнал, который будет характеризовать момент закрытия ЭМК. Таким сигналом, как показали экспериментальные исследования, может служить напряжение на верхнем выводе обмотки ЭМ.
На фиг. 3 показаны зарегистрированные в одном рабочем цикле экспериментальные переходные процессы изменения напряжения на верхнем выводе обмотки ЭМ U, тока в обмотке I и сигнала Ua с выхода акселерометра при величине напряжения питания обмотки ЭМ 40 В (типы линий, принятые для обозначения сигналов совпадают с фиг. 2). Анализ приведенных на фиг. 3 графиков показывает, что в процессе отпускания ток в обмотке ЭМ практически равен нулю и, поэтому, локального максимума не имеет. Однако, момент времени достижения величины наибольшего и второго по счету локального максимума напряжения на верхнем выводе обмотки ЭМ приближен к моменту удара якоря о корпус и может быть использован для оценивания момента закрытия ЭМК.
Семейство экспериментальных переходных процессов изменения напряжения на верхнем выводе обмотки ЭМ, полученное при разных значениях напряжения питания ЭМ, приведено на фиг. 4. Результаты этих экспериментов сведены в таблицу 1, где приведены значения напряжения питания и соответствующих характерных моментов времени и параметров рабочего цикла ЭМ.
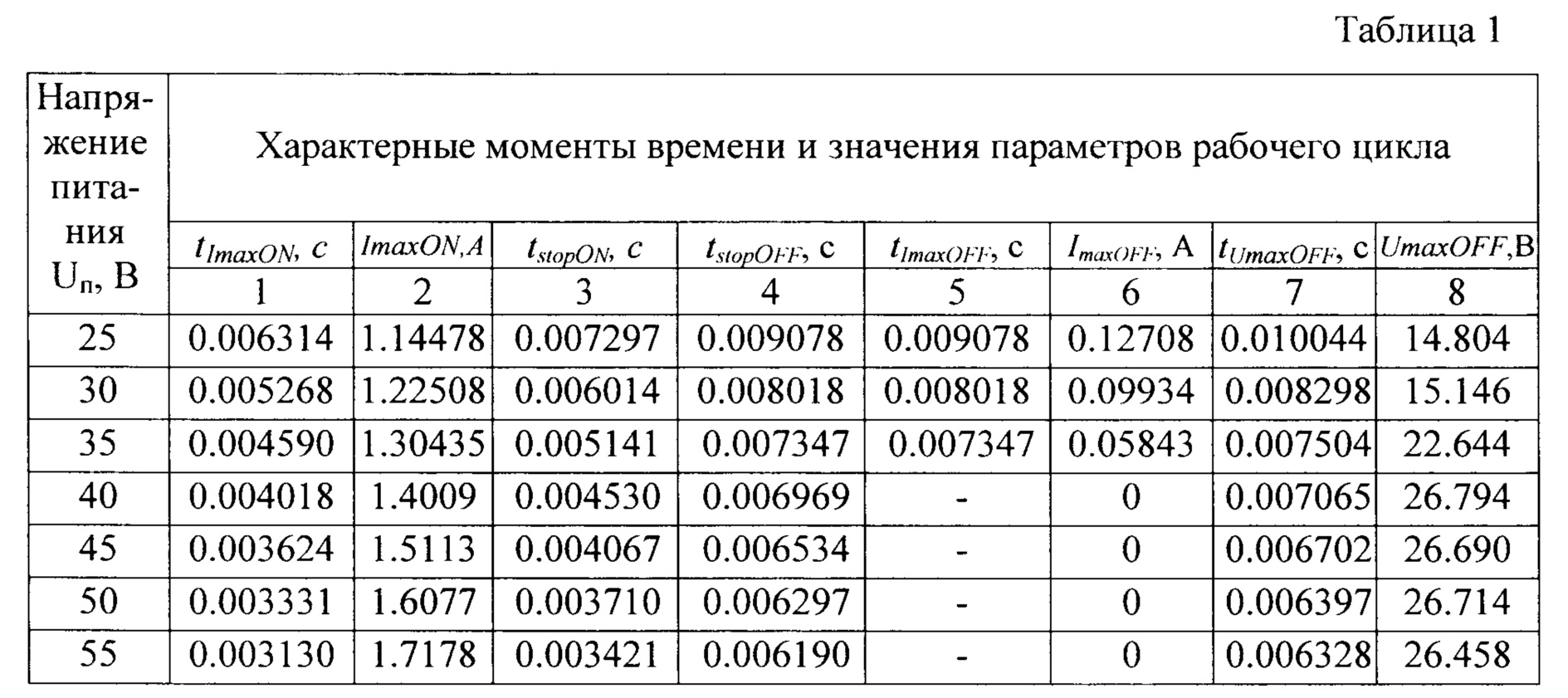
Характерные моменты времени и значения параметров рабочего цикла представлены в табл. 1 в следующем порядке (номера граф):
1 - момент времени достижения локального максимума тока в обмотке ЭМ при срабатывании;
2 - значение локального максимума тока в обмотке ЭМ при срабатывании;
3 - момент времени удара якоря ЭМ о стоп при срабатывании;
4 - момент времени удара якоря ЭМ о седло клапана при отпускании;
5 - момент времени достижения локального максимума тока в обмотке ЭМ при отпускании;
6 - значение локального максимума тока в обмотке ЭМ при отпускании;
7 - момент времени достижения наибольшего локального максимума напряжения на верхнем выводе обмотки ЭМ при отпускании;
8 - значение наибольшего локального максимума напряжения на верхнем выводе обмотки ЭМ при отпускании.
За нулевой отсчет времени при фиксировании каждого из указанных в табл. 1 моментов принимается момент подачи напряжения на обмотку ЭМ.
Анализ приведенных в табл. 1 данных позволяет предложить графическую иллюстрацию к ним, приведенную на фиг. 5. Здесь приведен график изменения значения локального максимума тока в обмотке ЭМ при отпускании ImaxOFF(UП) при изменении напряжения питания ЭМ. Этот график показывает, что при достижении некоторого значения напряжения питания (для исследуемого экземпляра ЭМ это чуть меньше 40 В) ток в обмотке ЭМ при отпускании не имеет локального максимума - ImaxOFF=0. Это значение напряжения питания с некоторым запасом устанавливают в качестве первого порогового значения напряжения на верхнем выводе обмотки ЭМ U1. При превышении этого порогового значения при срабатывании ЭМ оценка момента времени окончания движения якоря при отпускании осуществляется в момент достижения наибольшего локального максимума напряжения на верхнем выводе обмотки ЭМ при отпускании. Анализ графиков, приведенных на фиг. 4, позволяет установить второе пороговое значение напряжения на верхнем выводе обмотки ЭМ U2, выше которого осуществляется поиск локального максимума этого напряжения. Для исследуемого экземпляра ЭМ это пороговое значение может быть установлено, например, U2=22 В. В рабочем диапазоне напряжений питания ЭМ наибольший локальный максимум напряжения на верхнем выводе обмотки ЭМ при отпускании будет всегда выше этого установленного второго порогового значения напряжения.
Приведенный на фиг. 5 график изменения момента времени достижения локального максимума тока в обмотке ЭМ при срабатывании tImaxON(UП) показывает, что при увеличении напряжения питания уменьшается аппаратная задержка от момента подачи напряжения на обмотку ЭМ до начала движения якоря при срабатывании, что повышает быстродействие системы, использующей ЭМК в качестве исполнительного элемента.
Данные, приведенные в табл. 1, показывают, что момент достижения локального максимума напряжения на верхнем выводе обмотки ЭМ tumaxOFF отстает от момента фактического достижения якорем ЭМ конечного положения при отпускании (момента удара якоря ЭМ о седло) tstopOFF - Обозначим разницу между ними dt. Тогда время включенного состояния ЭМК tON будет определяться соотношением

График зависимости dt(UП) приведен на фиг. 5. Он показывает, что при UП>U1 величина dt составляет не более 5% от минимально возможного времени открытого состояния ЭМК, ее практически можно считать постоянной и учитывать в качестве поправки при определении времени включенного состояния ЭМК с использованием соотношения (3). График зависимости ton+dt(UП) (см. фиг. 5) показывает, что время включенного состояния ЭМК при UП>U1 практически не зависит от напряжения питания.
На графиках фиг. 6 показано семейство экспериментальных переходных процессов изменения тока в обмотке ЭМ и напряжения на верхнем выводе обмотки ЭМ для разных значений задержки tdelay между размыканием верхнего и нижнего ключей при напряжении питания UП=40 В. Результаты обработки этого семейства экспериментальных переходных процессов сведены в таблицу 2, где приведены значения задержки tdelay и соответствующих характерных моментов времени и параметров рабочего цикла ЭМ, обозначенных также как в табл. 1.
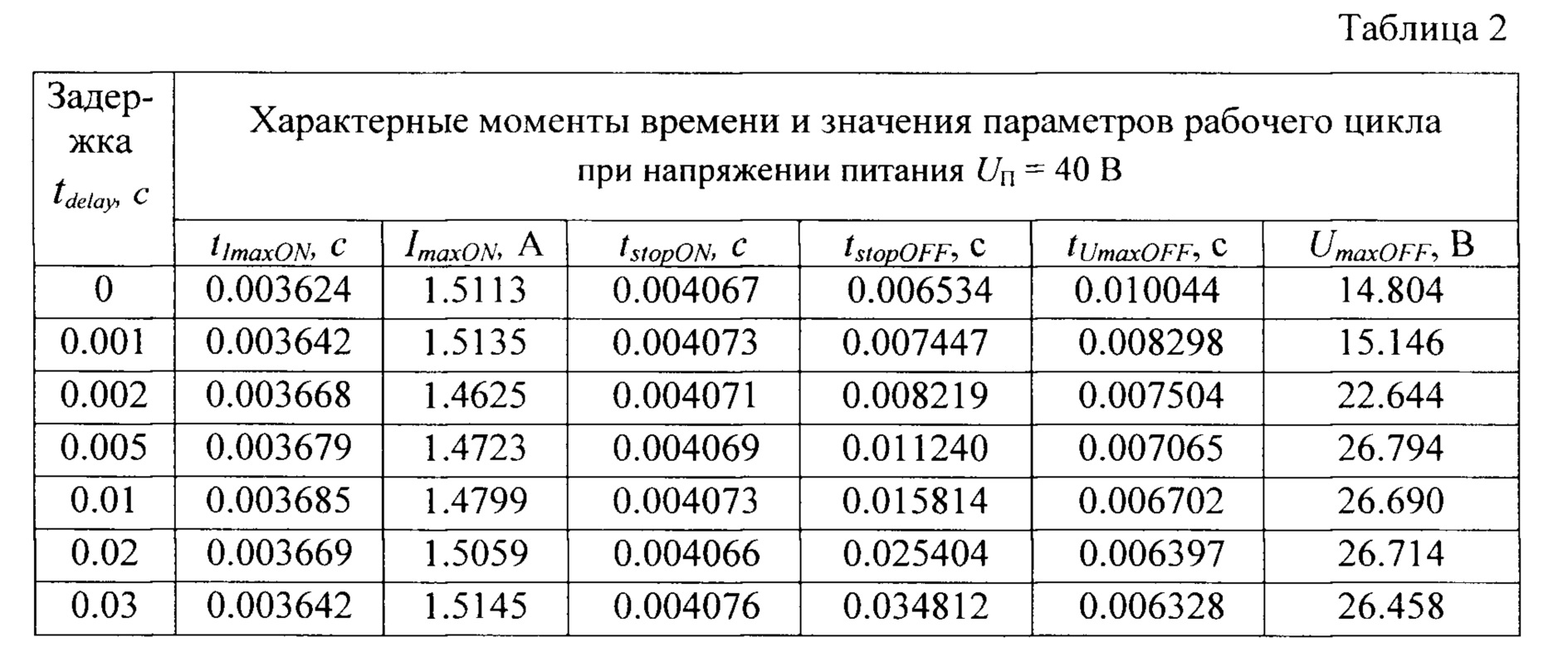
Аналогичные экспериментальные исследования были выполнены для значений напряжения питания 45 и 50 В. Результаты приведены в таблицах 3 и 4. Обозначения параметров, приведенных в этих таблицах соответствуют обозначениям, принятым в табл. 1 и табл. 2.
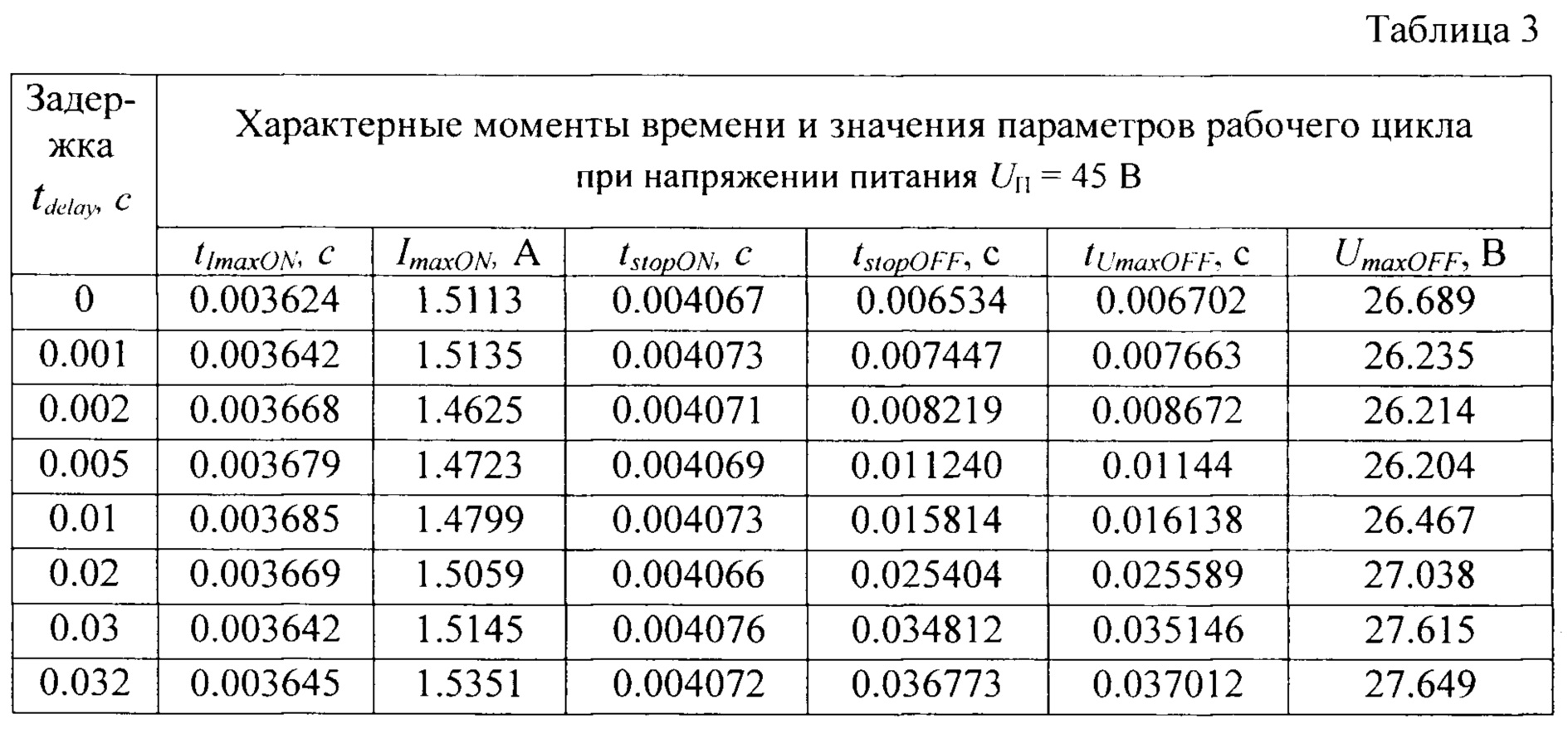
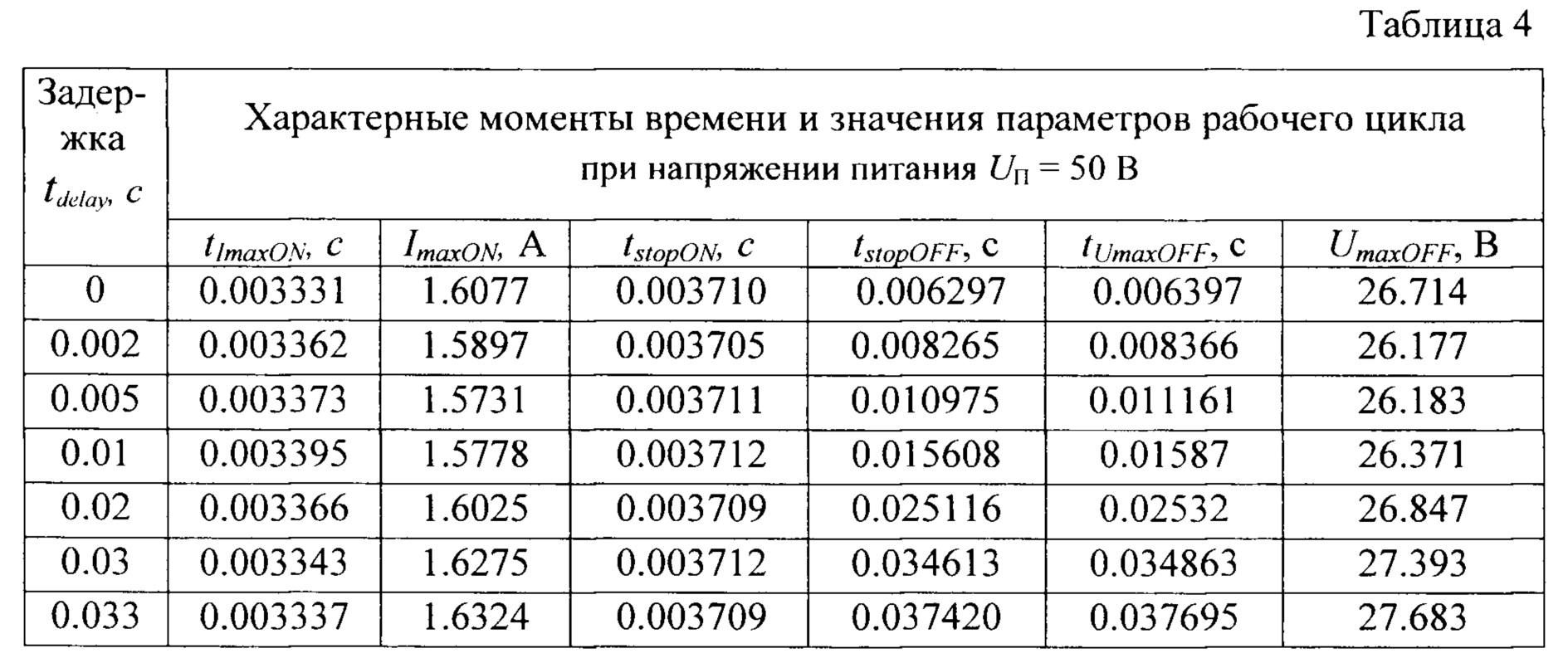
На основании данных, приведенных в таблицах 2, 3 и 4, на фиг. 7 построены графики зависимостей момента времени достижения наибольшего локального максимума напряжения на верхнем выводе обмотки ЭМ при отпускании tumaxOFF от задержки tdelay между размыканием верхнего и нижнего ключей при напряжении питания UП = 40, 45 и 50 В. Данные, соответствующие напряжению питания 40 В, нанесены знаком «*» и соединены пунктирной ломаной линией. Данные, соответствующие напряжению питания 45 В, нанесены знаком «х» и соединены штриховой ломаной линией. Данные, соответствующие напряжению питания 50 В, нанесены кружочками и соединены сплошной ломаной линией. Все три приведенные на фиг. 7 зависимости имеют практически линейный характер и имеют одинаковый угловой коэффициент. Поэтому эти данные предлагается усреднить и для определения величины требуемой задержки tdelay для обеспечения заданного значения времени включенного состояния ЭМК toN по соотношению (1) предложить единые значения коэффициента k и tON_min.
Соответствующая зависимость для определения величины требуемой задержки tdelay по заданной величине времени включенного состояния ЭМК toN показана на фиг. 8. Для исследуемого экземпляра ЭМ значение коэффициента к составило 1,0555, a toN mm равно 0,003078 с. Представленную на фиг. 8 зависимость предлагается использовать для определения величины требуемой задержки для всех возможных величин напряжения питания из области допустимых значений.
Проверку достижения локального максимума напряжения на верхнем выводе обмотки электромагнита клапана при отпускании осуществляют, например, путем сравнения текущего измеренного значения напряжения верхнем выводе обмотки с предыдущим и, если для трех последовательных измерений напряжения текущее измеренное значение меньше предыдущего, то считают, что локальный максимум напряжения достигнут.
Обычно управление ЭМК осуществляется по сигналам, поступающим от системы верхнего уровня.
Поэтому, полученное в текущем цикле работы время включенного состояния клапана передают по запросу системе верхнего уровня.
А требуемое в следующем рабочем цикле значение времени включенного состояния клапана ton передается от системы верхнего уровня до получения команды на включение клапана.
При цифровой реализации предлагаемого способа с использованием микропроцессорной техники может оказаться удобным весь диапазон регулирования времени включенного состояния клапана от минимально возможного (при одновременном размыкании верхнего и нижнего ключей) до максимально возможного (при размыкании только верхнего ключа) разбить на фиксированное количество равных временных интервалов. Границе каждого временного интервала поставить в соответствие величину временной задержки между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа), при реализации которой в процессе работы клапана достигается значение времени включенного состояния клапана, соответствующее установленной величине указанной временной задержки. Тогда при проведении лабораторных или заводских испытаний ЭМ клапана можно сформировать таблицу, связывающую дискретные значения границы каждого установленного временного интервала и соответствующей ей величиной указанной временной задержки. Эту таблицу запоминают и используют при формировании значения устанавливаемой в текущем рабочем цикле клапана указанной временной задержки для обеспечения требуемого значения времени включенного состояния клапана в данном цикле его работы.
При этом по значению требуемого в следующем рабочем цикле времени включенного состояния клапана выбирают из запомненной таблицы ближайшее к нему дискретное значение границы установленного временного интервала и соответствующую ему величину временной задержки между моментами размыкания верхнего и нижнего ключей реализуют в следующем рабочем цикле клапана.
Вычислительные ресурсы у системы верхнего уровня, как правило, значительно больше, чем у устройства управления ЭМК. Поэтому решение задачи формирования значения устанавливаемой в текущем рабочем цикле клапана временной задержки между размыканием верхнего ключа и размыканием нижнего ключа для достижения требуемого времени включенного состояния клапана может быть выполнено системой верхнего уровня. Тогда возможен вариант работы, когда требуемую в следующем рабочем цикле величину временной задержки между моментами размыкания верхнего и нижнего ключей передают в устройство управления ЭМК от системы верхнего уровня до получения команды на включение клапана.
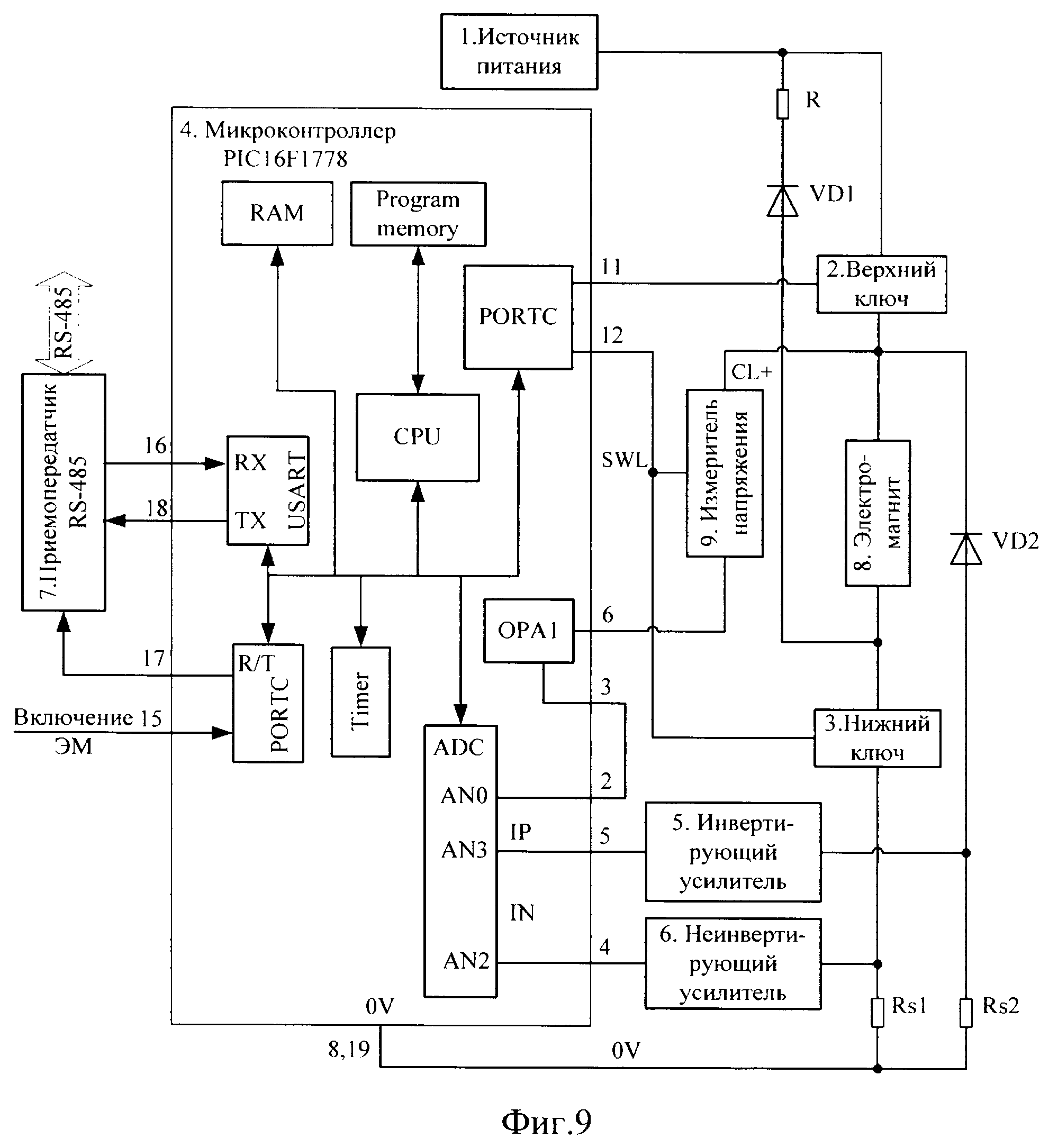
Функциональная схема устройства, реализующего предлагаемый способ с использованием микроконтроллера, приведена на фиг. 9.
Устройство для управления электромагнитным клапаном содержит источник питания (1), верхний ключ (2), нижний ключ (3), резистор (R), первый и второй диоды (VD1) и (VD2), первый и второй измерительные резисторы (Rs1) и (Rs2), микроконтроллер PIC16F1778 (4), инвертирующий и неинвертирующий усилители (5) и (6) и приемопередатчик RS-485 (7), связанный двунаправленной линией с системой верхнего уровня. Положительный вывод источника питания (1) соединен с первым выводом резистора (R) и входом верхнего ключа (2), выход которого соединен с катодом второго диода (VD2) и первым выводом электромагнита (8) клапана, второй вывод которого соединен с входом нижнего ключа (3) и анодом первого диода (VD1), катод которого соединен с вторым выводом резистора (R). Выход нижнего ключа (3) соединен с первым выводом первого измерительного резистора (Rs1) и входом неинвертирующего усилителя (6), выход которого соединен с выводом 4 микроконтроллера (4), выводы 8 и 19 которого соединены с отрицательным выводом источника питания (1) и вторыми выводами первого и второго измерительных резисторов (Rs1) и (Rs2). Управляющие входы верхнего и нижнего ключей (2) и (3) соединены соответственно с выводами 11 и 12 микроконтроллера (4). Анод второго диода (VD2) соединен с первым выводом второго измерительного резистора (Rs2) и входом инвертирующего усилителя (5). Вывод 16 микроконтроллера (4) соединен с выходом приемопередатчика RS-485 (7), два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера (4), вывод 15 которого соединен с дискретным выходом системы верхнего уровня. Устройство также содержит измеритель напряжения (9), измерительный вход которого соединен с первым выводом электромагнита (8) клапана, а управляющий вход с выводом 12 микроконтроллера (4), вывод 6 которого соединен с выходом измерителя напряжения (9). Причем выход инвертирующего усилителя (5) соединен с выводом 5 микроконтроллера (4), выводы 2 и 3 которого соединены между собой.
Силовой каскад управления ЭМК выполнен, как уже упоминалось выше, по полумостовой схеме. Величина тока, протекающего через обмотку ЭМК при срабатывании, оценивается по падению напряжения на первом измерительном резисторе (RS1). При этом достижение локального максимума тока можно определять, например, как предложено в [6].
Минимальное время открытого состояния ЭМК может быть сокращено за счет увеличения номинала резистора (R) (см. схему на фиг. 9). При увеличении величины R время отпускания ЭМК сокращается, а величина импульса напряжения, возникающего на резисторе (R) в момент отключения нижнего ключа (3), увеличивается. Предложенное техническое решение позволяет регулировать время включенного состояния ЭМК, не потребляя энергию источника питания после достижения током в обмотке локального максимума, после срабатывания ЭМК. Для снижения задержки, определяемой временем включения ЭМК, необходимо, как уже отмечалось, увеличивать напряжение источника питания.
Предлагаемое техническое решение позволяет регулировать время включенного состояния ЭМК во всем диапазоне допустимых значений напряжения питания, как при напряжении питания ниже первого порогового значения, так и выше него. При напряжении питания ниже первого порогового значения момент закрытия клапана определяется по достижении током в обмотке ЭМК локального максимума при его отпускании. При напряжении питания выше первого порогового значения момент закрытия клапана определяется после достижения напряжением на верхнем выводе обмотки ЭМ локального максимума, превышающего второе пороговое значение.
Источник питания (1) обеспечивает силовое напряжение, необходимое для срабатывания ЭМ (8) клапана, и напряжение 5 В для питания элементов схемы.
Микроконтроллер (4) управляет работой верхнего (2) и нижнего (3) ключей, измерителя напряжения (9) и приемопередатчика RS-485 (7). Кроме того, микроконтроллер (4) обеспечивает прием сигналов управления и значения длительности включенного состояния ЭМ (8) от системы верхнего уровня и передачу по ее запросу достигнутого в текущем рабочем цикле времени включенного состояния ЭМК. Приемопередатчик RS-485 (7) преобразует логические сигналы микроконтроллера (4) в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [8]. В качестве приемопередатчика RS-485 (7) может быть применена микросхема SN65HVD1785 [9]. Эта микросхема предназначена для использования в качестве приемопередатчика по стандарту RS-485 и для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик RS-485 (7) соединен с модулем универсального асинхронного приемопередатчика UART (Universal Asynchronous Receiver Transmitter) микроконтроллера (4), представляющего собой его периферийное устройство. Дополнительный сигнал управления направлением передачи (RYT) формируется программно. В качестве микроконтроллера (4) использован восьмиразрядный микроконтроллер PIC 16F1778-I/SO [10].
В качестве верхнего ключа (2) в устройстве может быть использован ключ верхнего уровня AUIPS7221R [11], содержащий в своем составе управляемый логическим сигналом драйвер MOSFET. В качестве нижнего ключа можно применить управляемый логическим уровнем транзистор IRLR2905 [12], который допускает для управления им использовать выходной сигнал микроконтроллера.
Измерение величины тока, протекающего через обмотку ЭМ (8) клапана, выполняется с помощью определения падения напряжения на измерительных резисторах (RS1) и (RS2). Выбор конкретного резистора для измерения величины тока в обмотке определяется состоянием нижнего ключа (3): при открытом нижнем ключе используется первый измерительный резистор (RS1), а при закрытом - второй измерительный резистор (RS2). Учитывая, что ток через измерительные резисторы протекает в противоположных направлениях, усиление полученных на них падений напряжений производится неинвертирующим усилителем (6) для первого измерительного резистора (RS1) и инвертирующим усилителем (5) - для второго измерительного резистора (RS2).
Возможная электрическая принципиальная схема силовой части устройства управления может быть построена аналогично приведенной в описании патента [6] на фиг. 5. В качестве операционного усилителя для построения схем инвертирующего и неинвертирующего усилителей можно использовать сдвоенный инструментальный усилитель MCP6V02 [13], имеющий возможность работать с напряжениями на входе и выходе близкими к нулю (Rail-to-Rail Input/Output) при однополярном питании. Для измерения низких уровней тока при определении перехода от спада тока к поиску локального максимума, в инвертирующем усилителе используется дополнительное смещение с помощью резистора R10 (см. электрическую принципиальную схему на фиг. 5 в описании патента [6]). Коэффициенты усиления для усилителей выбираются исходя из условия использования полного рабочего диапазона АЦП микроконтроллера при максимальном значении тока в обмотке ЭМК.
Измеритель напряжения (электрическая принципиальная схема возможного исполнения приведена на фиг. 10) обеспечивает согласование измеряемого напряжения с входным диапазоном АЦП. Для обеспечения необходимой разрешающей способности заявляемого способа он выполнен с переменным коэффициентом передачи. Управление коэффициентом передачи выполняется транзистором VT1 (см. схему на фиг. 10) по сигналу управления нижним ключом (SWL). Для обеспечения необходимой точности в качестве ключей необходимо использовать NMOSFET транзисторы IRLML0060TRPbF [14] с малым сопротивлением RDS(on), не превышающим 116 мОм, при напряжении затвора 4,5 В.
Блок-схема возможного алгоритма, реализуемого при работе устройства, приведена на фиг. 11. Этот алгоритм может быть запрограммирован и исполнен микроконтроллером при работе устройства.
Работает устройство следующим образом. При включении источника питания (1) микроконтроллер (4) выполняет инициализацию периферийных устройств и переходит к ожиданию команд от внешних устройств. До получения значения времени включенного состояния клапана, принимается значение tdelay=0 с, соответствующее минимальному времени включенного состояния ЭМК ton_min. При таком значении tdelay при получении команды по дискретному входу «Включение ЭМ», поступающему на вывод 15 микроконтроллера (4), на его выводах 11 и 12 формируется высокий логический уровень, позволяющий включить верхний (2) и нижний (3) ключи. Сигнал с выхода верхнего ключа (2) поступает на управляющий вход измерителя напряжения (9), устанавливая коэффициент передачи напряжения К=R15||R17/(R16+R15||R17). Сигнал с выхода измерителя напряжения (9) поступает на неинвертирующий вход операционного усилителя ОРА1, входящего в состав периферийных модулей микроконтроллера (4). Операционный усилитель настроен на работу в режиме повторителя с единичным коэффициентом усиления (Forced unity gain). Применение операционного усилителя в режиме повторителя позволяет исключить влияние изменения выходного сопротивления измерителя напряжения (9) на точность работы канала AN0 АЦП (ADC), на вход которого приходит нормированный сигнал напряжения на верхнем выводе обмотки ЭМ. При включении ЭМК производится измерение указанного напряжения. После чего запускаются циклические измерения АЦП (ADC) по входу AN2 (вывод 4 микроконтроллера (4)), соединенному с выходом неинвертирующего усилителя (6). При этом ток в обмотке ЭМ протекает по цепи: положительный вывод источника питания (1), верхний ключ (2), электромагнит (8), нижний ключ (3), первый измерительный резистор (RS1), отрицательный вывод источника питания 0V, как показано на фиг. 1, а. Для контроля величины тока в обмотке ЭМ при его срабатывании измеряют падение напряжения на первом измерительном резисторе (RS1). Значение тока в обмотке ЭМ (8), полученное в данном рабочем цикле, сравнивается с предыдущим измерением этого параметра для поиска локального максимума. При этом наибольшее полученное значение сохраняется. Признак достижения током в обмотке ЭМ (8) значения локального максимума формируется при получении результата измерения тока меньше наибольшего сохраненного значения не менее трех раз подряд (см. блок-схему алгоритма на фиг. 11). По этому признаку определяется факт срабатывания ЭМ. Такое решение позволяет повысить помехозащищенность способа, и одновременно обеспечить набор скорости якорем ЭМ для обеспечения надежности его срабатывания. После определения факта срабатывания ЭМ, размыкается верхний ключ (2), запускаются таймер Т1 для определения времени отпускания ЭМК и таймер Т2 - ограничивающий отрезок времени контроля отпускания величиной 1,25 tго (время гарантированного отпускания). Для обеспечения заданного времени включенного состояния ЭМК toN, по выражению (1) рассчитывается задержка отключения нижнего ключа (3) tdelay, значение которой загружается в таймер Т2. При значении tON=tON_min на выводах 11 и 12 микроконтроллера (4) устанавливается напряжение низкого логического уровня, что приводит к размыканию верхнего (2) и нижнего (3) ключей. При этом ток в обмотке ЭМ протекает по цепи (см. фиг. 1, с): отрицательный вывод источника питания 0V, второй измерительный резистор RS2, первый диод VD1, электромагнит ЕМ, второй диод VD2, резистор R. Перед определением времени отпускания измеренное в начале включения ЭМК значение напряжения сравнивается с первым пороговым значением, и если оно меньше, то контролируется ток в обмотке ЭМК. Для контроля величины тока в обмотке ЭМ при его отпускании измеряют падение напряжения на втором измерительном резисторе (RS2). Для чего АЦП (ADC) переключается на циклические измерения с входа AN1 (вывод 3 микроконтроллера (4)), к которому подключен выход инвертирующего усилителя (5). Использование инвертирующего усилителя (5) позволяет получить положительное напряжение на входе АЦП (ADC) при отрицательном падении напряжения на втором измерительном резисторе (RS2). Текущий результат измерения сравнивается с предыдущим для поиска сначала локального минимума тока, а затем его локального максимума. После нахождения локального максимума останавливаются таймеры Т1 и Т2, и устанавливается бит соответствующий достижению якорем ЭМ (8) конечного положения при отпускании. В случае отсутствия указанной выше последовательности минимального и максимального значений тока по срабатыванию таймера Т2 данный бит сбрасывается, формируя признак того, что отпускания ЭМ (8) (выключения ЭМК) не произошло.
В случае если измеренное в начале включения ЭМК значение напряжения больше первого порогового значения, то измеряется напряжение на верхнем выводе обмотки ЭМ. При этом коэффициент передачи измерителя напряжения становится равным К=R17/(R16+R17). АЦП (ADC) переключается на циклические измерения с входа AN0 (вывод 2 микроконтроллера (4)), к которому подключен выход операционного усилителя ОРА1 (вывод 3 микроконтроллера (4)). Текущий результат измерения напряжения сравнивается со вторым пороговым значением напряжения, и в случае превышения его текущим значением измеряемого напряжения выполняется поиск локального максимума напряжения, позволяющего определить время открытого состояния ЭМК. После нахождения локального максимума останавливаются таймеры Т1 и Т2, и устанавливается бит соответствующий достижению якорем ЭМ (8) конечного положения при отпускании. В случае отсутствия указанной выше последовательности минимального и максимального значений тока по срабатыванию таймера Т2 данный бит сбрасывается, формируя признак того, что отпускания ЭМ (8) (выключения ЭМК) не произошло.
Для проверки работоспособности и эффективности заявляемого технического решения при были проведены лабораторные испытания исследуемого образца ЭМ по управлению временем включенного состояния ЭМК с использованием макетного образца заявляемого устройства для управления ЭМК, реализующего при своей работе алгоритм, блок-схема которого приведена на фиг. 11.
Испытания проводились при разных значениях напряжения питания ЭМ и разных задаваемых требуемых значениях времени включенного состояния клапана. При проведении этого этапа испытаний использовались полученные по результатам предварительных лабораторных испытаний и соответствующие графику, приведенному на фиг. 8, значения коэффициента k=1.0555 и параметра ton_min=0.003078 с. Значения требуемой величины задержки между размыканиями верхнего и нижнего ключей для достижения устанавливаемой в текущем рабочем цикле величины времени включенного состояния клапана принимались в соответствии с соотношением (1) при указанных значениях параметров к и toN_min.
Результаты испытаний с полученными при их проведении значениями характерных моментов времени рабочего цикла ЭМ и погрешностями реализованного времени включенного состояния ЭМК приведены в таблицах 5-7.
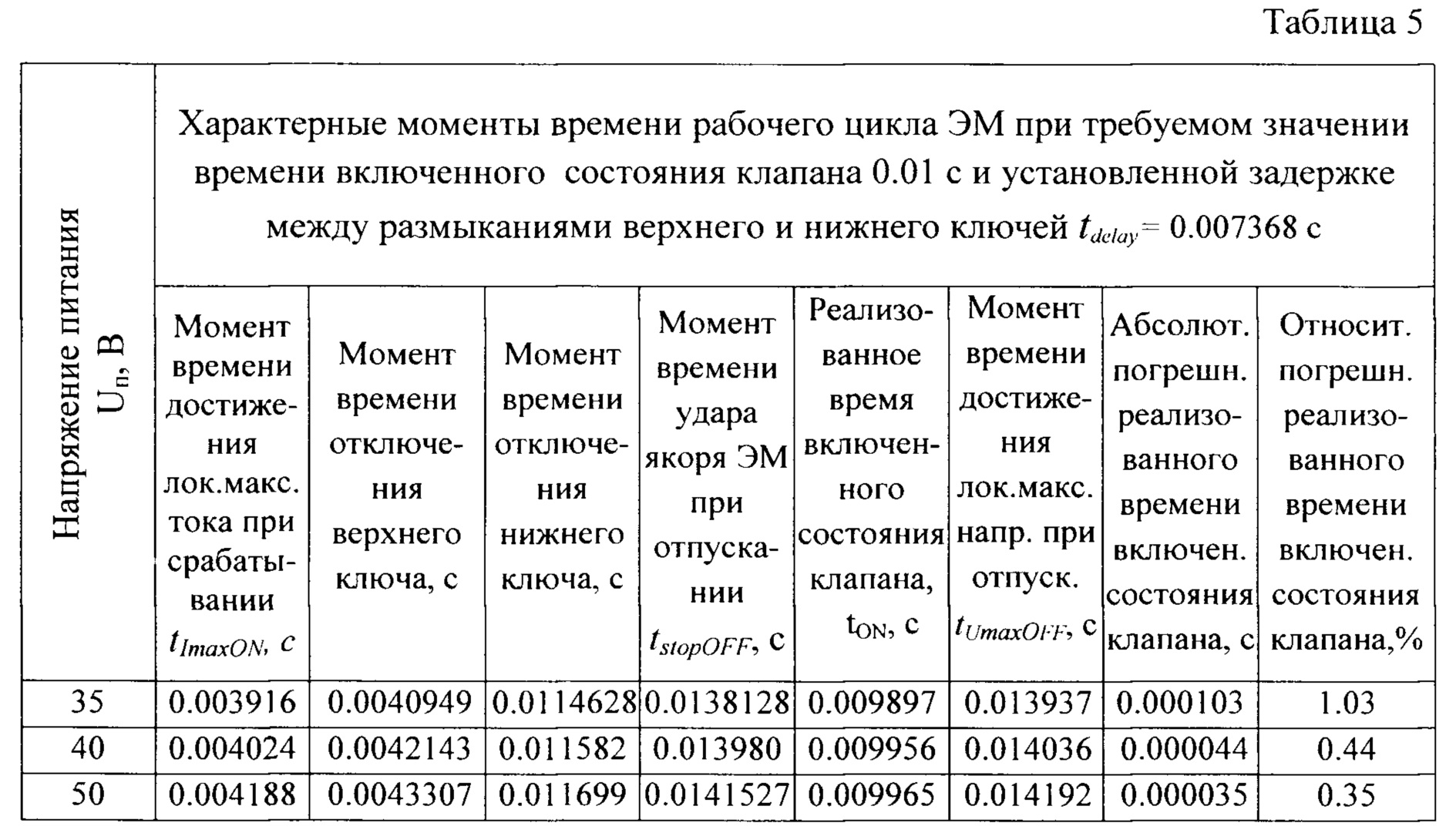
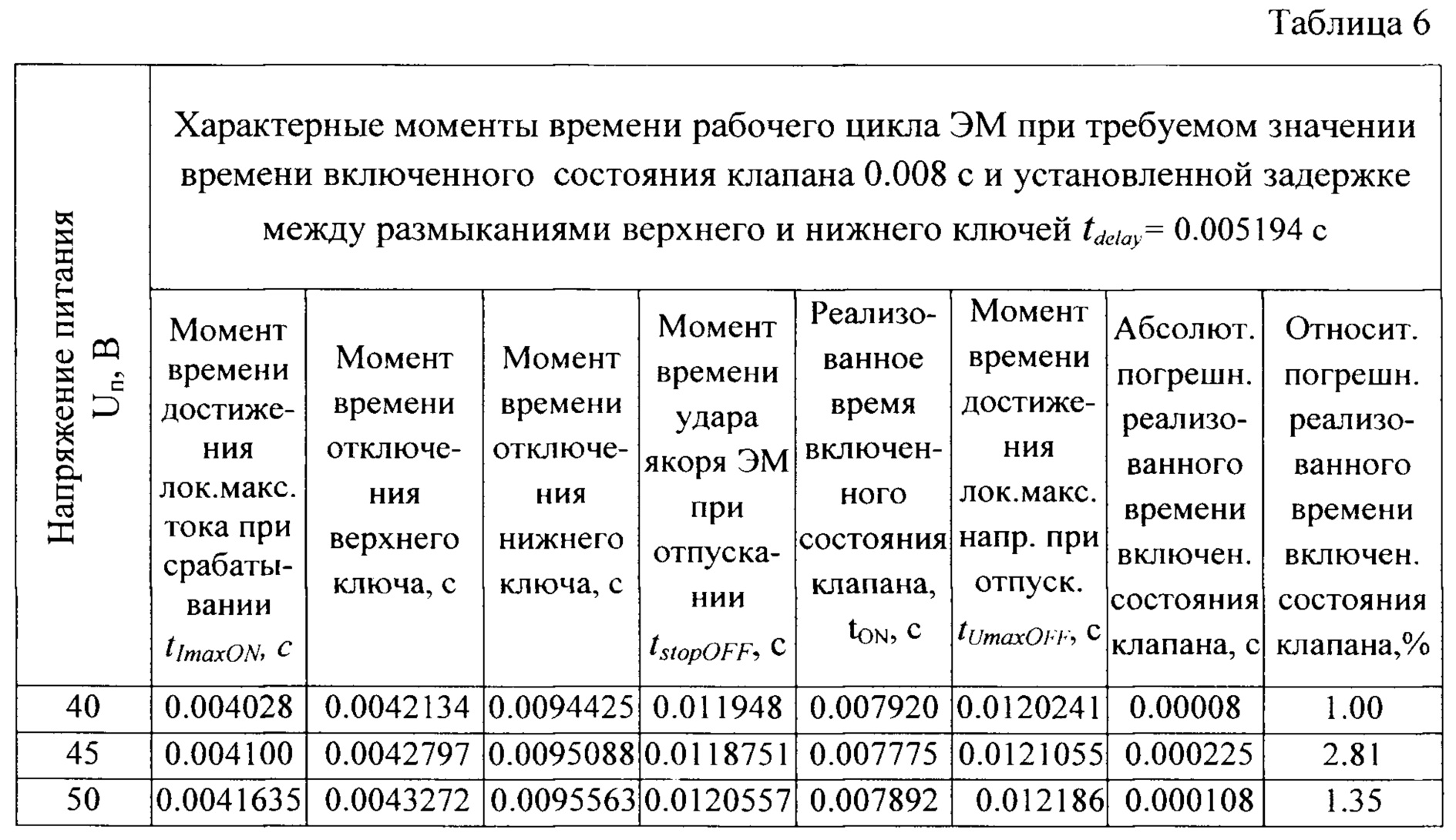
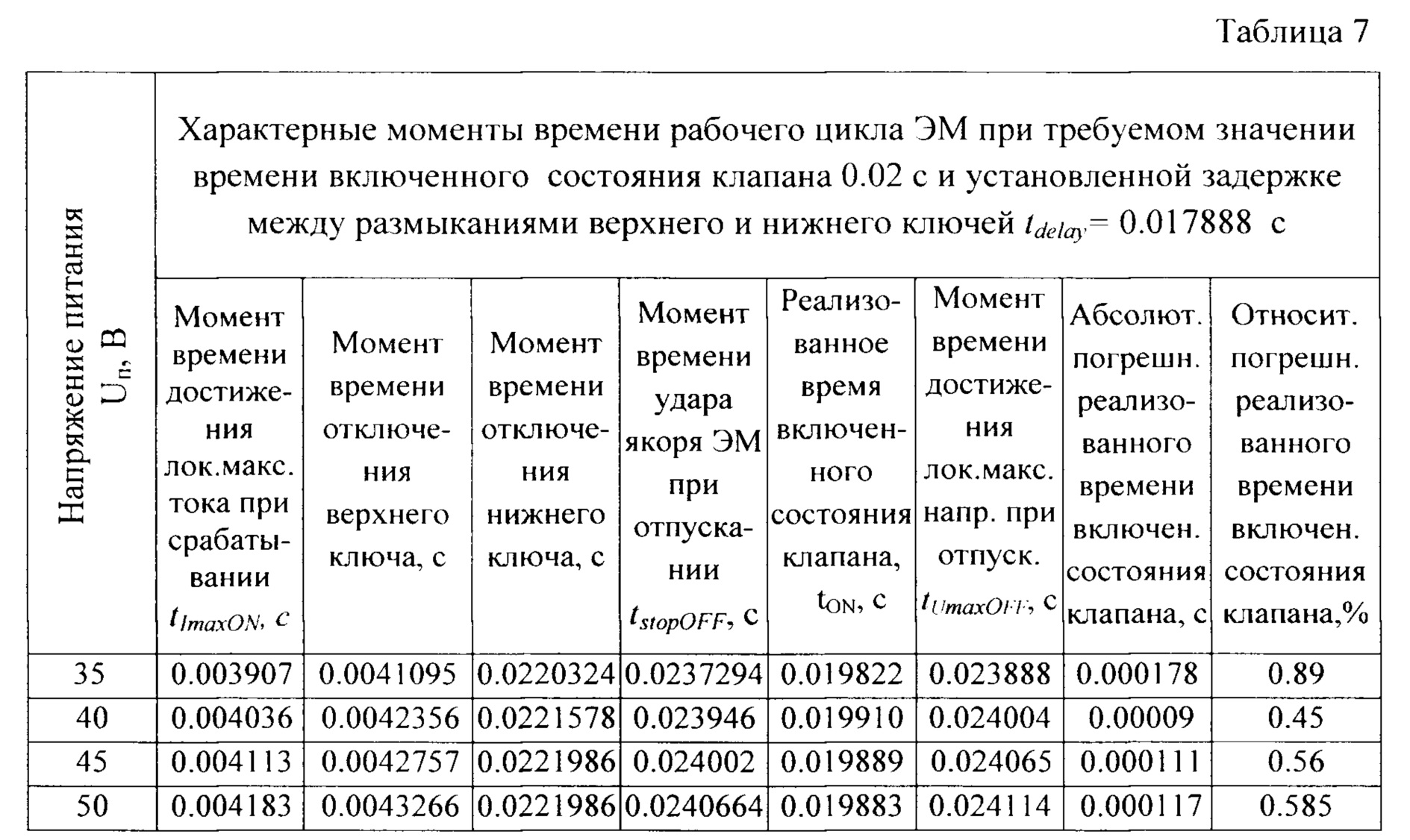
Полученные результаты свидетельствуют о высокой для практического применения точности регулирования времени включенного состояния ЭМК, которая возрастает с увеличением устанавливаемой в текущем рабочем цикле величины времени включенного состояния клапана.
На фиг. 12 представлены полученные при проведении лабораторных испытаний для подтверждения работоспособности и эффективности заявляемого технического решения экспериментальные переходные процессы изменения тока в обмотке ЭМ I, напряжения на верхнем выводе обмотки U и выходного сигнала акселерометра Ua, жестко связанного с якорем, при значении напряжения питания UП=45 В для одного цикла работы ЭМ. Эти осциллограммы соответствуют данным, приведенным во второй строке таблицы 6. На этом графике представлены также сигналы управления коммутацией верхнего SH и нижнего SL ключей, а также верхнее пороговое значение напряжения U2.
Таким образом, предлагаемое техническое решение позволяет с высокой надежностью обеспечивать точное значение времени включенного состояния ЭМК, особенно когда требуется минимизировать его и задержку на начало его открытия. Кроме того, данное решение позволяет контролировать факты срабатывания и отпускания ЭМ клапана, а также создает возможность для измерения длительностей процессов его срабатывания и отпускания. При этом снижаются требования к применяемым аппаратным средствам без снижения качества управления ЭМК и контроля его состояния. Расширение функциональных возможностей достигается тем, что управлять временем включенного состояния клапана можно в более широком диапазоне изменения напряжения питания, даже в условиях, когда ток в обмотке ЭМ при отпускании не имеет локального максимума.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US 6249418 B1 SYSTEM FOR CONTROL OF AN ELECTROMAGNETIC ACTUATOR. Date of Patent: Jun. 19, 2001.
2. EP 0 882 303 B1 SOLENOID DRIVER AND METHOD FOR DETERMINING SOLENOID OPERATIONAL STATUS 21.04.2004 Bulletin 2004/17.
3. US 10,161,339 B2 DRIVE DEVICE FOR FUEL INJECTION. Date of Patent: Dec. 25,2018.
4. US 010605190 B2 INJECTION CONTROL UNIT. Date of Patent: Mar. 31, 2020.
5. US 8,681,468 B2 METHOD OF CONTROLLING SOLENOID VALVE. Date of Patent: Mar. 25, 2014.
6. RU 2756292 C1 СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. 29.09.2021. Бюл. №28.
7. RU 2746964 С1 СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. 22.04.2021. Бюл. №12.
8. ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998 Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
9. [Электронный ресурс] // URL: http://www.ti.com/lit/ds/symlinkysn65hvd1785.pdf (дата обращения 14.07.2022).
10. PIC 16(L)F 1777/8/9 28/40/44-Pin, 8-Bit Flash Microcontroller [Электронный ресурс] // URL: https://ww1.microchip.com/downloads/en/DeviceDoc/PIC16(L)F1777_8_9_Family_Data_Sheet_40001819D.pdf (дата обращения 14.07.2022).
11. [Электронный ресурс] // URL: https//www/Infineon.com/dgdl/auisp7221t.pdf (дата обращения 14.07.2022).
12. [Электронный ресурс] // URL: https//www/Infineon.com/dgdl/irlr2905.pdf (дата обращения 14.07.2022).
13. [Электронный ресурс] // 22058c.pdf www.microchip.com/product/en/MCP6V02 (дата обращения 14.07.2022).
14. IRLML0060TRPbF Product Ddtasheet [Электронный ресурс] https://www.infineom.com/dgdl/irlm10060pbf.pdf?field=55462533600a40153566493ef25e6, (дата обращения 20.07.2022).
Твердотопливный ракетный двигатель
Способ сборки газовода с эластичным шарниром
Клапан регулирования расхода газа
Способ подтверждения внутрибаллистических и энергетических характеристик твердотопливного заряда ракетного двигателя и стендовое устройство
Импульсный малогабаритный пороховой вытеснитель рабочей жидкости
Твердотопливный импульсный двигатель
Нагружающее устройство
Нагружающее устройство
Газораспределительный клапан
Узел соединения отделяемых частей летательного аппарата
Способ выплавки стали, легированной азотом
Способ формирования аудита персональной биометрической информации
Способ измельчения спеченных твердых сплавов
Премикс для кур-несушек второй фазы продуктивности
Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу usb и устройство для его осуществления
Магнитная клавиатура
Способ стабилизации уровня тока в обмотке двухфазного биполярного шагового двигателя в полношаговом режиме и драйвер для его осуществления
Способ определения момента достижения механического упора электроприводом с биполярным шаговым двигателем и устройство для его осуществления
Способ определения положения якоря электромагнита и устройство для его осуществления
Способ мониторинга температуры обмотки электромагнита и устройство для его осуществления

