Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов.
Известны различные способы определения перемещения или положения исполнительного элемента ЭМ по характеру изменения тока обмотки.
Например, в [1] описаны способ и устройство определения положения исполнительного элемента ЭМ по результатам сравнения сигнала, пропорционального току, протекающему через обмотку ЭМ, с опорным напряжением. Причем опорное напряжение формируют из сигнала, пропорционального току, обработанного фильтром нижних частот (ФНЧ). Сравнение выполняют с использованием компаратора, на один из входов которого подается сигнал, пропорциональный току, протекающему через обмотку ЭМ, а на другой - опорное напряжение. Результат сравнения позволяет определить только, имело ли место срабатывание ЭМ.
В описании патента [2] предложены способ и реализующее его устройство, которые позволяют определить положение якоря соленоида путем наложения сигнала распознавания фиксированной частоты на управляющий сигнал драйвера обмотки. Объединенный сигнал подается на обмотку соленоида, и переменная составляющая тока, протекающего через его обмотку, меняется в зависимости от изменения индуктивности обмотки соленоида, которая, в свою очередь, зависит от положения якоря. Датчик тока формирует выходной сигнал, соответствующий уровню тока, протекающего через обмотку соленоида, а с помощью полосового фильтра выделяют переменную компоненту этого выходного сигнала, которая вызвана действием сигнала распознавания. Соответствующий сигнал определения положения якоря формируется на выходе фильтра. Предложенное техническое решение требует использования значительных аппаратных средств, таких как генератор фиксированной частоты, ФНЧ и полосовой фильтр, демодулятор. Кроме того, его применение возможно только совместно с системами, поддерживающими широтно-импульсное регулирование тока ЭМ.
Предложенная в [3] система позволяет определить положение управляющего элемента электрически управляемого привода. Привод включается управляемым ключом в момент, когда ток через обмотку ЭМ имеет величину меньшую, чем нижнее пороговое значение, и выключается в момент, когда током достигнуто верхнее пороговое значение. Длительность включенного и выключенного состояния задаются как функции нижнего и верхнего пороговых значений, а характер переключения зависит от положения управляющего элемента. Положение управляющего элемента определяется из соотношения продолжительности включенного и выключенного состояний и суммы этих временных интервалов. Оно формируется как результат сравнения длительностей упомянутой суммы и включенного и выключенного состояний с соответствующими сохраненными справочными данными. Данное техническое решение может быть использовано только в системах с релейным (гистерезисным) регулированием тока в обмотке ЭМ. При этом длительность включенного состояния будет зависеть не только от положения управляющего элемента, но и от изменения напряжения питания. Кроме того, реализация этого способа требует значительного объема ресурсов управляющей системы для хранения массивов значений справочных данных, используемых при выполнении сравнения указанных переменных.
Аналогичным образом определяется положение якоря ЭМ в техническом решении [4], наиболее близком к предлагаемому изобретению и принятым за прототип. Описанный здесь способ основан на измерении периода переключения питающего напряжения и сравнении длительностей последующих периодов. Этому техническому решению свойственны все те же самые недостатки, что и описанному ранее [3].
Задачей предлагаемого изобретения является расширение функциональных возможностей и снижение влияния дестабилизирующих факторов.
Для решения поставленной задачи предлагается использовать измерение текущего значения тока через обмотку электромагнита и приложенного к ней напряжения на этапе срабатывания электромагнита и формирование сигнала, характеризующего состояние электромагнита. При этом предлагается по измерениям текущего значения тока через обмотку определять скорость его изменения и в момент времени, когда при срабатывании электромагнита начинается уменьшение текущего значения тока через обмотку, определять величину локального максимума тока, а в момент времени, когда после окончания движения якоря при срабатывании заканчивается уменьшение текущего значения тока через обмотку и начинается его увеличение, формировать сигнал, свидетельствующий о произошедшем срабатывании электромагнита и переходе его якоря в состояние, соответствующее полному притягиванию якоря к стопу и наличию минимально возможного зазора между ними. Кроме того, по величине локального максимума тока и величине напряжения, приложенного к обмотке, определяют начальное положение якоря по отношению к стопу (начальный зазор), которое было перед подачей напряжения на обмотку электромагнита.
Для определения начального положение якоря по отношению к стопу (начального зазора) до начала эксплуатации электромагнита при испытаниях в лабораторных или заводских условиях формируют таблицу, связывающую значения начального зазора электромагнита в обесточенном состоянии со значениями прикладываемого к обмотке напряжения и локального максимума тока, текущего через обмотку при срабатывании электромагнита, эту таблицу запоминают и используют при определении начального положения якоря по отношению к стопу (начального зазора) при эксплуатации электромагнита.
Начальное положение якоря по отношению к стопу (начальный зазор) при каждом срабатывании электромагнита можно определять по текущим значениям приложенного к обмотке напряжения и локального максимума тока, например, методом линейной интерполяции с использованием сохраненных табличных значений.
Начальное положение якоря по отношению к стопу (начальный зазор) при каждом срабатывании электромагнита можно также определять по текущим значениям приложенного к обмотке напряжения и локального максимума тока по соотношению

где 

Zs - начальное положение якоря по отношению к стопу (начальный зазор) при текущем срабатывании электромагнита;
 - значение локального максимума тока при текущем срабатывании электромагнита;
- значение локального максимума тока при текущем срабатывании электромагнита;
U - значение приложенного к обмотке напряжения при текущем срабатывании электромагнита;
е - основание натурального логарифма;
a 1, a2, b2, b1, b0 - постоянные коэффициенты, определяемые, например, методом наименьших квадратов при аппроксимации значений начального положения якоря по отношению к стопу (начального зазора) в зависимости от значений приложенного к обмотке напряжения и локального максимума тока, сформированных в виде таблицы.
Сигнал, свидетельствующий о произошедшем срабатывании электромагнита, и значение начального положения якоря по отношению к стопу (начального зазора), определенное при текущем срабатывании электромагнита, можно передавать внешним устройствам для дальнейшего использования этой информации.
Для снижения влияния помех и обязательного формирования на каждом рабочем цикле сигнала, свидетельствующего о произошедшем срабатывании электромагнита или о том, что срабатывания не произошло, значение начального положения якоря по отношению к стопу (начального зазора) при текущем срабатывании электромагнита определяют на отрезке времени [0,2tгc; tгc], где tгc - время гарантированного срабатывания электромагнита.
В устройство, реализующее предлагаемый способ, для решения задачи предлагаемого изобретения дополнительно введены измеритель напряжения, измеритель тока и приемопередатчик RS-485, связанный двунаправленной линией с внешними устройствами. Причем в устройстве использован микроконтроллер PIC16F1778, вывод 11 которого соединен с управляющим входом ключа, причем вход измерителя напряжения соединен с выходом ключа, а его выход с выводом 5 микроконтроллера, вывод 6 которого соединен с выходом измерителя тока, вход которого соединен с выходом электромагнита. Вывод 16 микроконтроллера соединен с выходом приемопередатчика RS-485, два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера, вывод 4 которого соединен с дискретным выходом системы верхнего уровня. Первый вывод первого резистора соединен с отрицательным выводом источника питания. Первый вывод второго резистора соединен с выводами 2 и 3 микроконтроллера, вывод 7 которого соединен со вторыми выводами обоих резисторов.
Сущность предлагаемого технического решения поясняется чертежами.
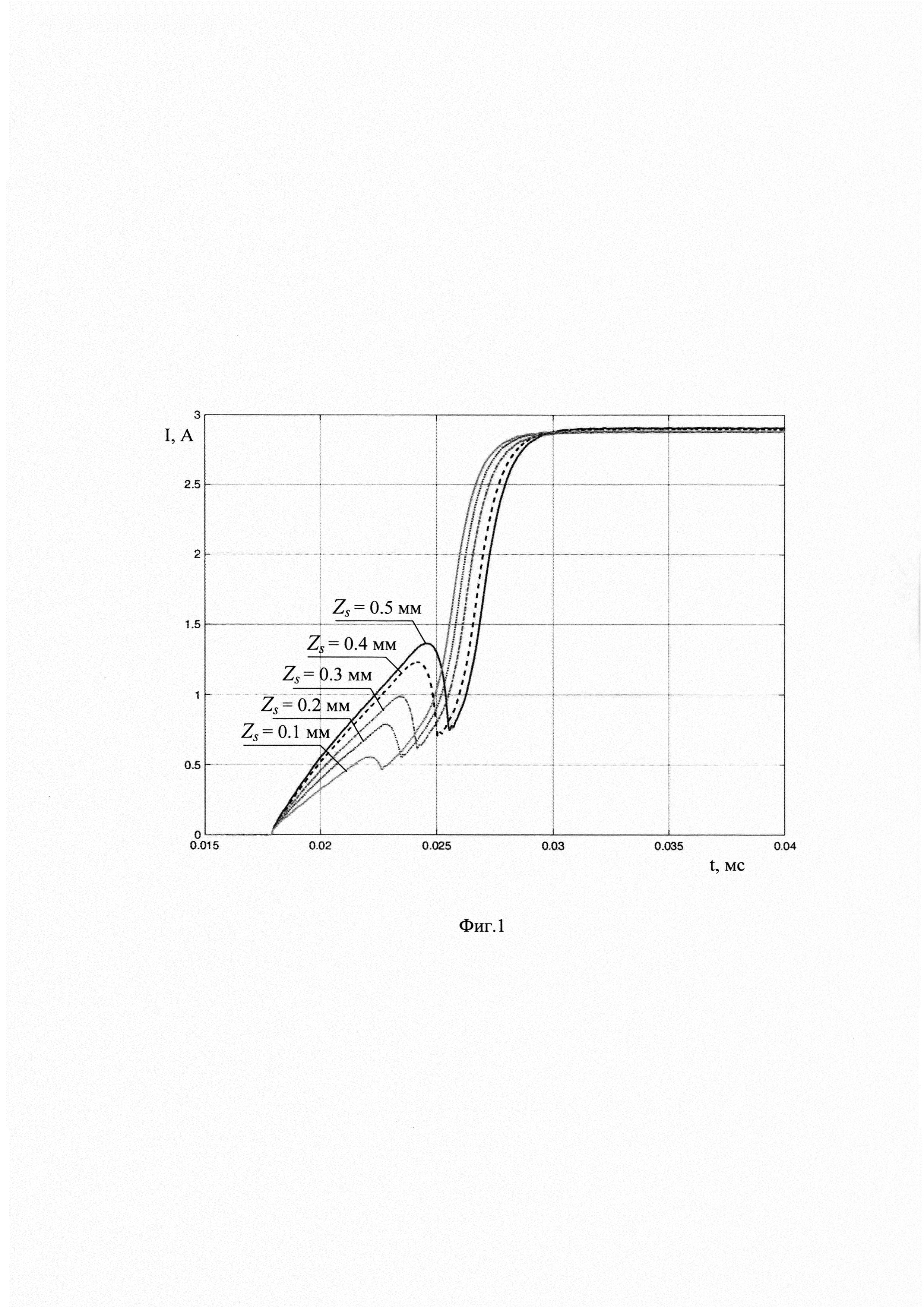
Фиг. 1. Экспериментальные зависимости тока в обмотке ЭМ при его срабатывании от времени для разных значений начального зазора и при известной фиксированной величине напряжения, подаваемого на обмотку.
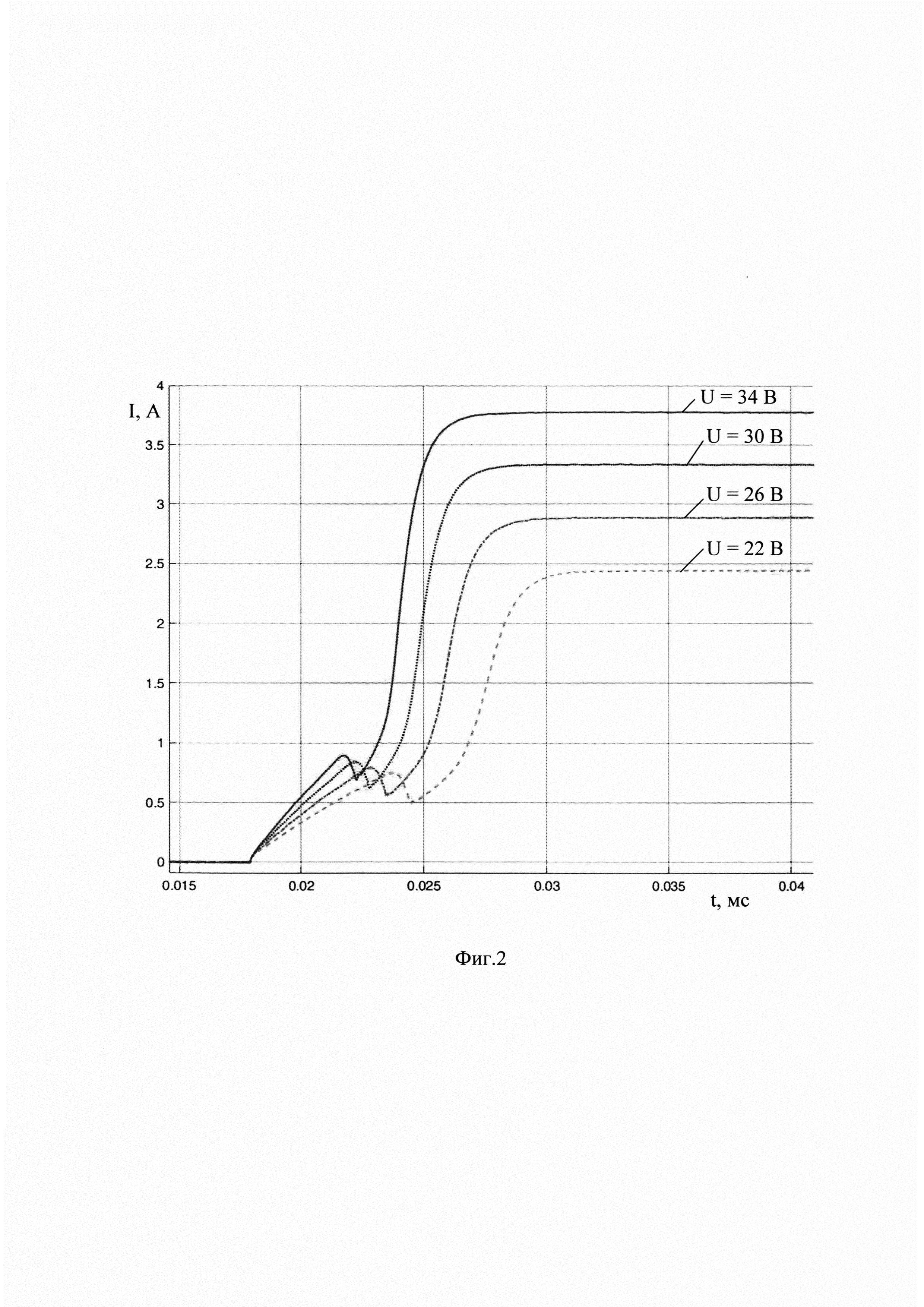
Фиг. 2. Экспериментальные зависимости тока в обмотке ЭМ при его срабатывании от времени для разных значений напряжения, подаваемого на обмотку, при известной фиксированной величине начального зазора.
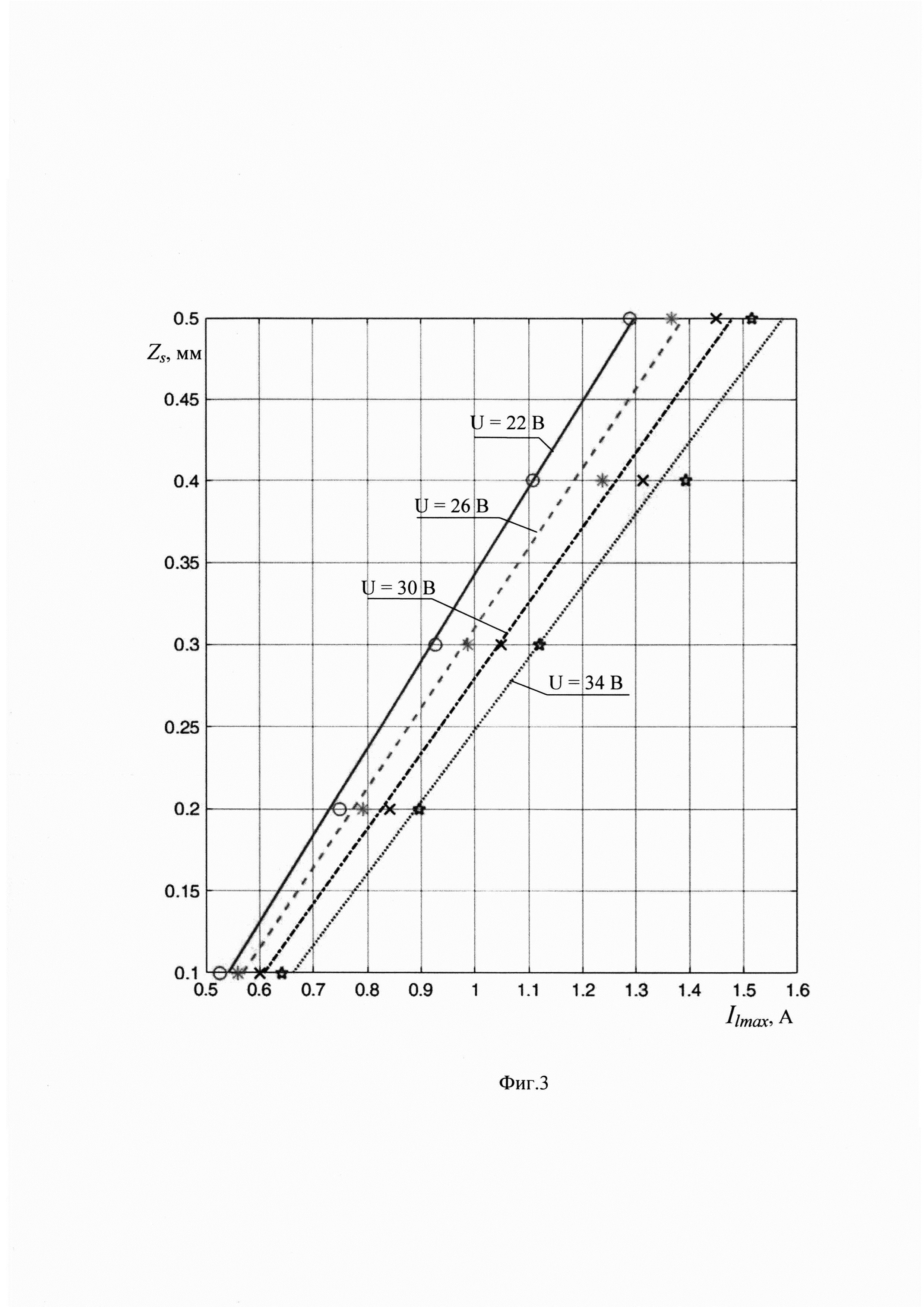
Фиг. 3. Экспериментальные и аппроксимирующие зависимости начального зазора от локального максимума тока в обмотке ЭМ при срабатывании для разных значений напряжения, подаваемого на обмотку.
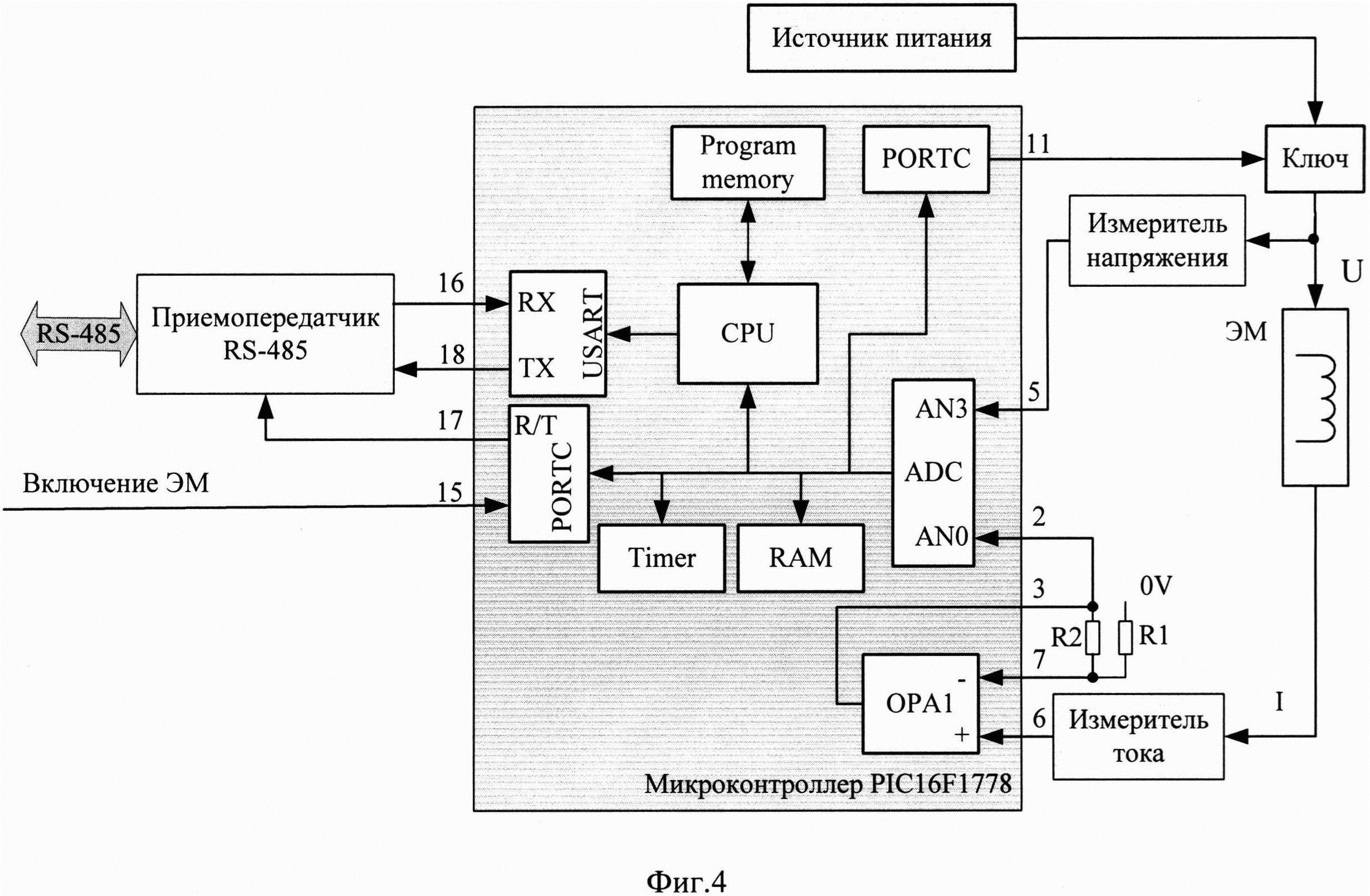
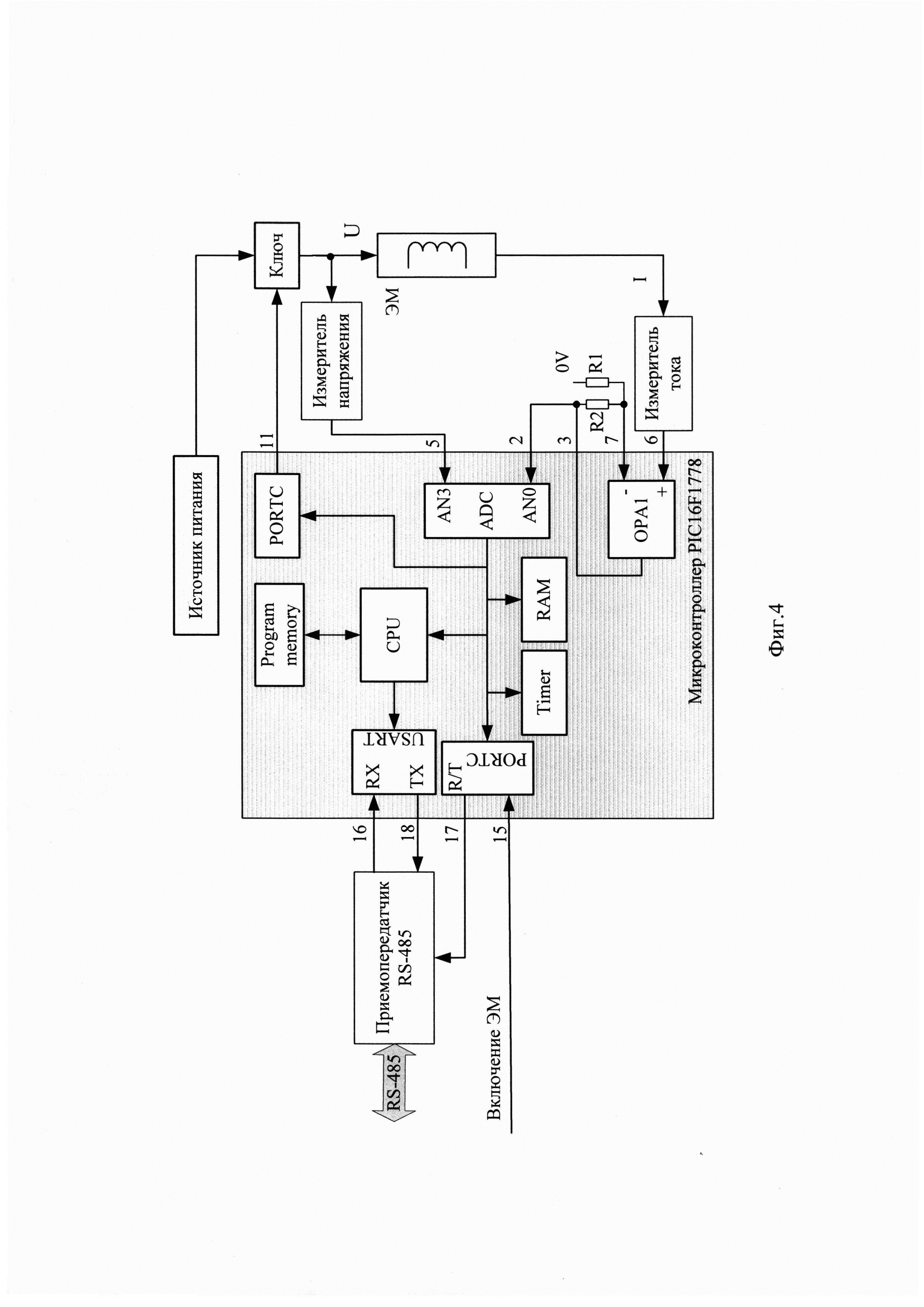
Фиг. 4. Функциональная схема устройства для определения положения якоря электромагнита.
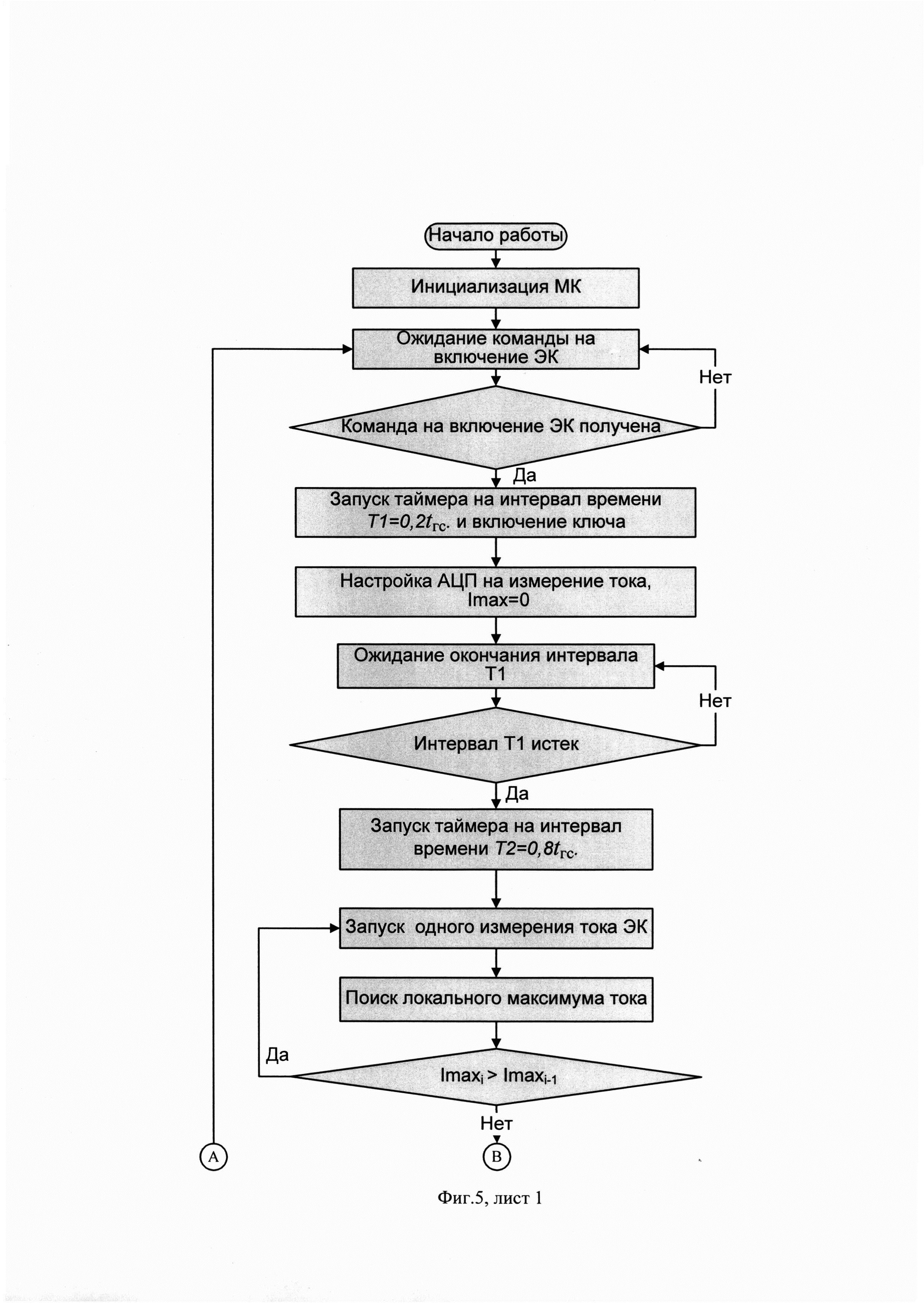
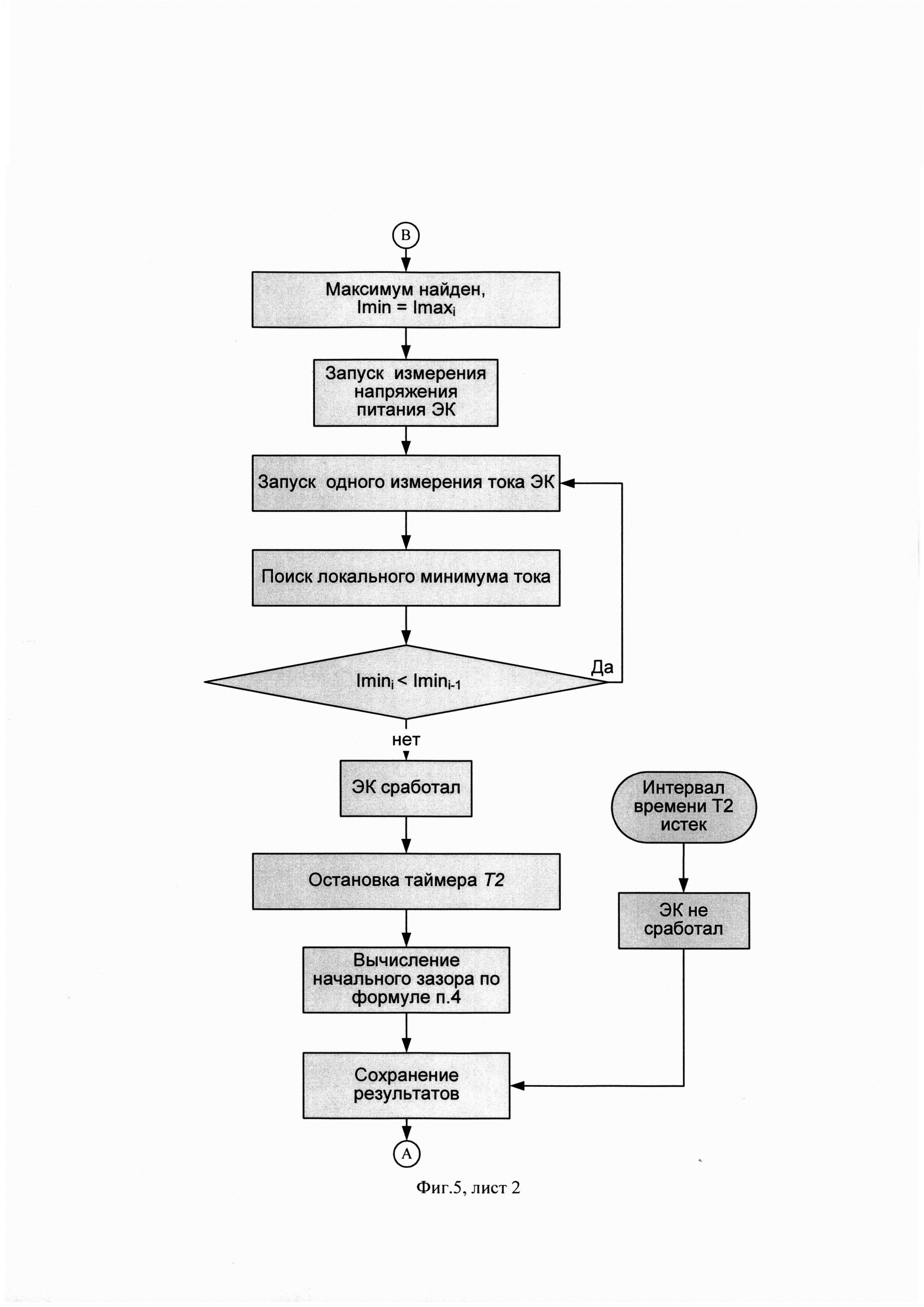
Фиг. 5. Блок-схема возможного алгоритма, реализуемого при работе устройства для определения положения якоря электромагнита.
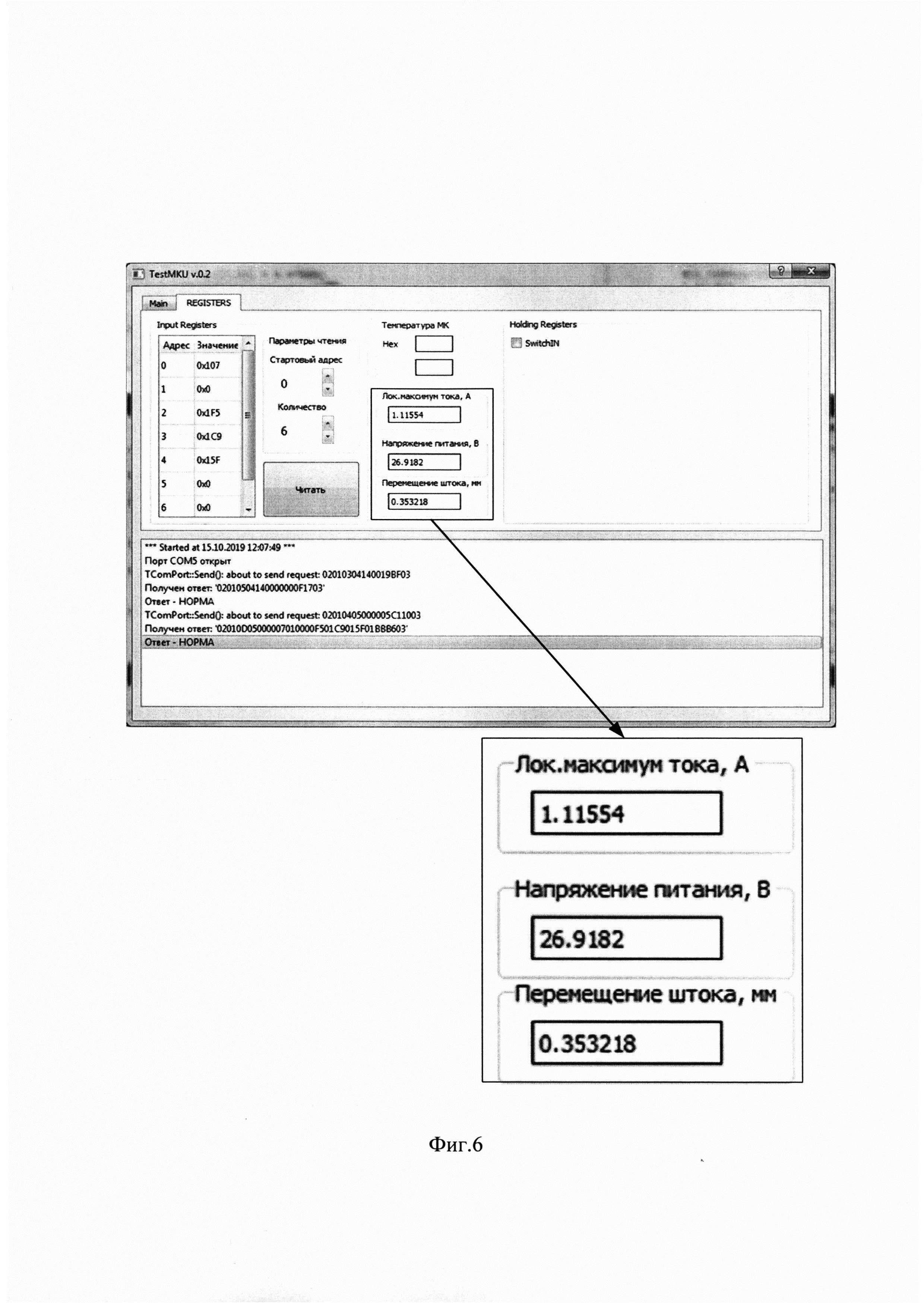
Фиг. 6. Изображение на экране персонального компьютера окна, отражающего работу заявляемого устройства, связанного с персональным компьютером с помощью приемопередатчика RS-485 и конвертера RS-485 - USB.
Физической основой предлагаемого способа послужили результаты лабораторных испытаний ЭМ втяжного типа с дисковым якорем. В процессе этих испытаний исследовались переходные процессы изменения тока в обмотке ЭМ при его срабатывании для разных значений напряжения питания обмотки и разных значениях начального зазора якоря.
На фиг. 1 приведены экспериментальные переходные процессы изменения тока в обмотке ЭМ, полученные при его срабатывании в результате подачи на его обмотку напряжения 26 В для разных значений начального зазора, установленного с помощью микрометрического винта и набора щупов №2 ГОСТ 882-75, кл. 2. Анализ приведенных на этом рисунке графиков показывает, что величина локального максимума тока в обмотке, которого он достигает при срабатывании, существенно зависит от величины начального зазора между якорем и стопом. Причем величина локального максимума тока монотонно возрастает с увеличением начального зазора. При этом существует, по крайней мере, еще один фактор, достаточно существенно влияющий на величину локального максимума тока в обмотке при его срабатывании.
Экспериментальные переходные процессы изменения тока в обмотке ЭМ, приведенные на фиг. 2, получены при срабатывании ЭМ в результате подачи на его обмотку разного напряжения при одинаковой величине начального зазора 0,2 мм. Эти графики отражают зависимость локального максимума тока при срабатывании ЭМ от напряжения питания. Все полученные на лабораторных испытаниях ЭМ данные, отражающие изменение локального максимума тока, наблюдаемого при срабатывании ЭМ, сведены в таблицу 1.
Эти экспериментальные замеры, нанесенные на координатную плоскость, представлены на фиг. 3. Здесь по оси абсцисс отложены полученные при измерениях переходных процессов значения локального максимума тока, а по оси ординат значения начального зазора, установленного перед подачей напряжения на обмотку. Замеры, соответствующие напряжению 22 В, отмечены кружочками. Замеры, соответствующие напряжению 26 В, отмечены символом «*». Замеры, соответствующие напряжению 30 В, отмечены символом «х», а замеры, соответствующие напряжению 34 В, отмечены пятиконечными звездочками.
Характер зависимости, связывающей начальный зазор с измеренной величиной локального максимума тока для каждого поданного на обмотку напряжения, близок к линейному. Поэтому было принято решение аппроксимировать полученные экспериментальные данные прямыми линиями по методу наименьших квадратов. Тогда связь между измеренным значением локального максимума тока при срабатывании ЭМ и имевшим место начальным зазором может быть описана уравнением прямой (1) с переменными коэффициентами С1 и С2, зависящими от величины напряжения, подаваемого на обмотку ЭМ, и определяемыми, например, соотношениями (2) и (3) соответственно. Могут быть предложены и другие соотношения для определения коэффициентов С1 и С2. Значения постоянных коэффициентов а1, a2, b2, b1, b0, позволяющих рассчитать значения коэффициентов С1 и С2 по соотношениям (2) и (3), получены методом наименьших квадратов. Таким образом, для известных значений постоянных коэффициентов а1, a2, b2, b1, b0 и измеренных экспериментально при срабатывании ЭМ значений приложенного напряжения и локального максимума тока в обмотке можно с использованием соотношений (1), (2) и (3) рассчитать величину начального зазора ЭМ в каждом цикле срабатывания (при каждой подаче напряжения на обмотку ЭМ).
В таблице 2 приведены значения переменных коэффициентов С1 и С2, соответствующие рассчитанным методом наименьших квадратов по массиву экспериментальных данных из таблицы 1, величинам постоянных коэффициентов: а1=-0,0913, а2=0,3917, b2=-0,0003328, b1=0,01833 и b0=-0,4290.
Соответствующие аппроксимирующие прямые приведены на фиг. 3. Они построены для использованных при проведении экспериментальных исследований значений напряжения, подаваемого на обмотку ЭМ, и значений коэффициентов С1 и С2, приведенных в таблице 2.
Таким образом, предлагаемый способ включает измерение текущего значения тока через обмотку ЭМ и приложенного к ней напряжения на этапе срабатывания ЭМ и формирование сигнала, характеризующего состояние ЭМ. По измерениям текущего значения тока через обмотку определяют скорость его изменения и в момент времени, когда при срабатывании электромагнита начинается уменьшение текущего значения тока через обмотку (скорость его изменения становится отрицательной), определяют величину локального максимума тока и измеряют значение напряжения питания ЭМ. А в момент времени, когда после окончания движения якоря при срабатывании заканчивается уменьшение текущего значения тока через обмотку и начинается его увеличение (скорость изменения тока опять становится положительной), формируют сигнал, свидетельствующий о произошедшем срабатывании электромагнита и переходе его якоря в состояние, соответствующее полному притягиванию якоря к стопу и наличию минимально возможного зазора между ними.
Кроме того, по величине локального максимума тока и величине напряжения, приложенного к обмотке в момент срабатывания ЭМ, определяют начальное положение якоря по отношению к стопу (начальный зазор), которое было перед подачей напряжения на обмотку электромагнита.
Для определения начального зазора по величине локального максимума тока и величине напряжения, приложенного к обмотке, до начала эксплуатации электромагнита при испытаниях в лабораторных или заводских условиях формируют таблицу, связывающую значения начального зазора электромагнита в обесточенном состоянии со значениями прикладываемого к обмотке напряжения и локального максимума тока, текущего через обмотку при срабатывании электромагнита. Эту таблицу сохраняют и используют при определении начального положения якоря по отношению к стопу (начального зазора) при эксплуатации электромагнита.
Начальное положение якоря по отношению к стопу (начальный зазор) при каждом срабатывании электромагнита можно определять по текущим значениям приложенного к обмотке напряжения и локального максимума тока, например, методом линейной интерполяции с использованием сохраненных табличных значений.
Можно также начальное положение якоря по отношению к стопу (начальный зазор) при каждом срабатывании электромагнита определять по текущим значениям приложенного к обмотке напряжения и локального максимума тока с использованием соотношений (1), (2) и (3). При этом, значения постоянных коэффициентов а1, а2, b2, b1, b0, определяют, например, методом наименьших квадратов при аппроксимации значений начального положения якоря по отношению к стопу (начального зазора) в зависимости от значений приложенного к обмотке напряжения и локального максимума тока, помещенных в сформированной таблице, как было описано выше.
Сигнал, свидетельствующий о произошедшем срабатывании электромагнита, и значение начального положения якоря по отношению к стопу (начального зазора), определенное при текущем срабатывании электромагнита, передают внешним устройствам, например, для индикации при проведении наладочных работ или для использования при формировании сигналов управления электромагнитом.
Для снижения влияния помех и обязательного формирования после каждой подачи напряжения на обмотку сигнала, свидетельствующего о произошедшем срабатывании электромагнита или о том, что срабатывания не произошло, значение начального положения якоря по отношению к стопу (начального зазора) при текущем срабатывании электромагнита определяют на отрезке времени [0,2tгc; tгc], где tгc - время гарантированного срабатывания ЭМ.
Функциональная схема устройства для определения положения якоря электромагнита, предлагаемого для реализации заявляемого способа, показана на фиг. 4. Устройство содержит последовательно соединенные источник питания и ключ, выход которого соединен со входом электромагнита, а также микроконтроллер, выход которого соединен с управляющим входом ключа. В устройство дополнительно введены измеритель напряжения, измеритель тока, два резистора и приемопередатчик RS-485, связанный двунаправленной линией с внешними устройствами. Причем в устройстве использован микроконтроллер PIC16F1778, вывод 11 которого соединен с управляющим входом ключа. Вход измерителя напряжения соединен с выходом ключа, а его выход с выводом 5 микроконтроллера, вывод 6 которого соединен с выходом измерителя тока. Вход измерителя тока соединен с выходом электромагнита. Вывод 16 микроконтроллера соединен с выходом приемопередатчика RS-485, два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера. Вывод 4 микроконтроллера соединен с дискретным выходом системы верхнего уровня. Первый вывод первого резистора соединен с отрицательным выводом источника питания. Первый вывод второго резистора соединен с выводами 2 и 3 микроконтроллера, вывод 7 которого соединен со вторыми выводами обоих резисторов.
Работает устройство следующим образом. Источник питания обеспечивает подачу напряжения, необходимого для срабатывания ЭМ, и напряжения 5 В для питания элементов схемы. Ключ является управляемым силовым элементом, выполняющим коммутацию напряжения на ЭМ по сигналам управления. Измеритель тока выполняет нормирование тока I, протекающего через обмотку ЭМ, то есть преобразование его в напряжение, пропорциональное этому току. Для согласования полученного напряжения с входным диапазоном АЦП (ADC) использован операционный усилитель ОРА1, входящий в состав периферийных устройств микроконтроллера (МК). Этот операционный усилитель с дополнительными резисторами R1 и R2 образуют неинвертирующий усилитель с коэффициентом, необходимым для полного использования входного диапазона АЦП. Измерение тока начинается после включения силового ключа по окончании защитного интервала времени, величиной 0,2tгс (tгc - время гарантированного срабатывания ЭМ). Результат измерения тока на текущем такте МК сравнивается с предыдущим, сохраненным в оперативной памяти (RAM) МК. В зависимости от результата сравнения новый результат или записывается на место предыдущего, если он больше него, или отбрасывается, и принимается решение о том, что локальный максимум тока найден. После чего АЦП настраивается на измерение напряжения питания ЭМ. Измеритель напряжения ЭМ выполняет нормирование напряжения на обмотке ЭМ для согласования с параметрами аналогового входа АЦП микроконтроллера.
МК управляет работой силового ключа и приемопередатчика RS-485, а также обеспечивает прием сигналов управления от внешнего устройства и передачу рассчитанного значения начального зазора и сигнала, свидетельствующего о произошедшем или нет срабатывании ЭМ, внешним устройствам. Приемопередатчик RS-485 преобразует логические сигналы МК в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [5]. ЭМ является объектом контроля и управления.
Предлагаемое устройство может использоваться в распределенной системе управления как оконечное. Его работа происходит по командам внешнего устройства верхнего уровня, передаваемым по последовательному интерфейсу. Также указанный интерфейс может использоваться для передачи значений тока и напряжения питания ЭМ в текущем рабочем цикле, а также для настройки параметров управления. Включение ЭМ может выполняться по командам, поступающим по интерфейсу RS-485, или по дискретному сигналу «Вкл. ЭМ». В качестве приемопередатчика RS-485 применена микросхема SN65HVD1785 [6]. Эта микросхема предназначена для использования в качестве приемопередатчика по стандарту RS-485 и для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик соединен с модулем универсального асинхронного приемопередатчика UART (Universal Asynchronous Receiver Transmitter) МК, представляющего собой периферийное устройство микроконтроллера. Дополнительный сигнал управления направлением передачи (R\T) формируется программно. В качестве микроконтроллера использован восьмиразрядный микроконтроллер PIC16F1778-I/SO [7]. В качестве управляемого ключа в устройстве может быть использован ключ верхнего уровня IPS511G [8].
Блок-схема возможного алгоритма, реализуемого при работе заявляемого устройства, приведена на фиг. 5. Таймер, который запускается в блоке «Запуск таймера на интервал времени T2=0,8tгc и включение ключа», осуществляет асинхронный и независимый от выполнения последующих блоков алгоритма счет времени. Окончание счета таймера означает, что за время Т2 срабатывания электромагнита не произошло, и в этом случае выполнение алгоритма прерывается и продолжается далее с блока «Интервал времени Т2 истек».
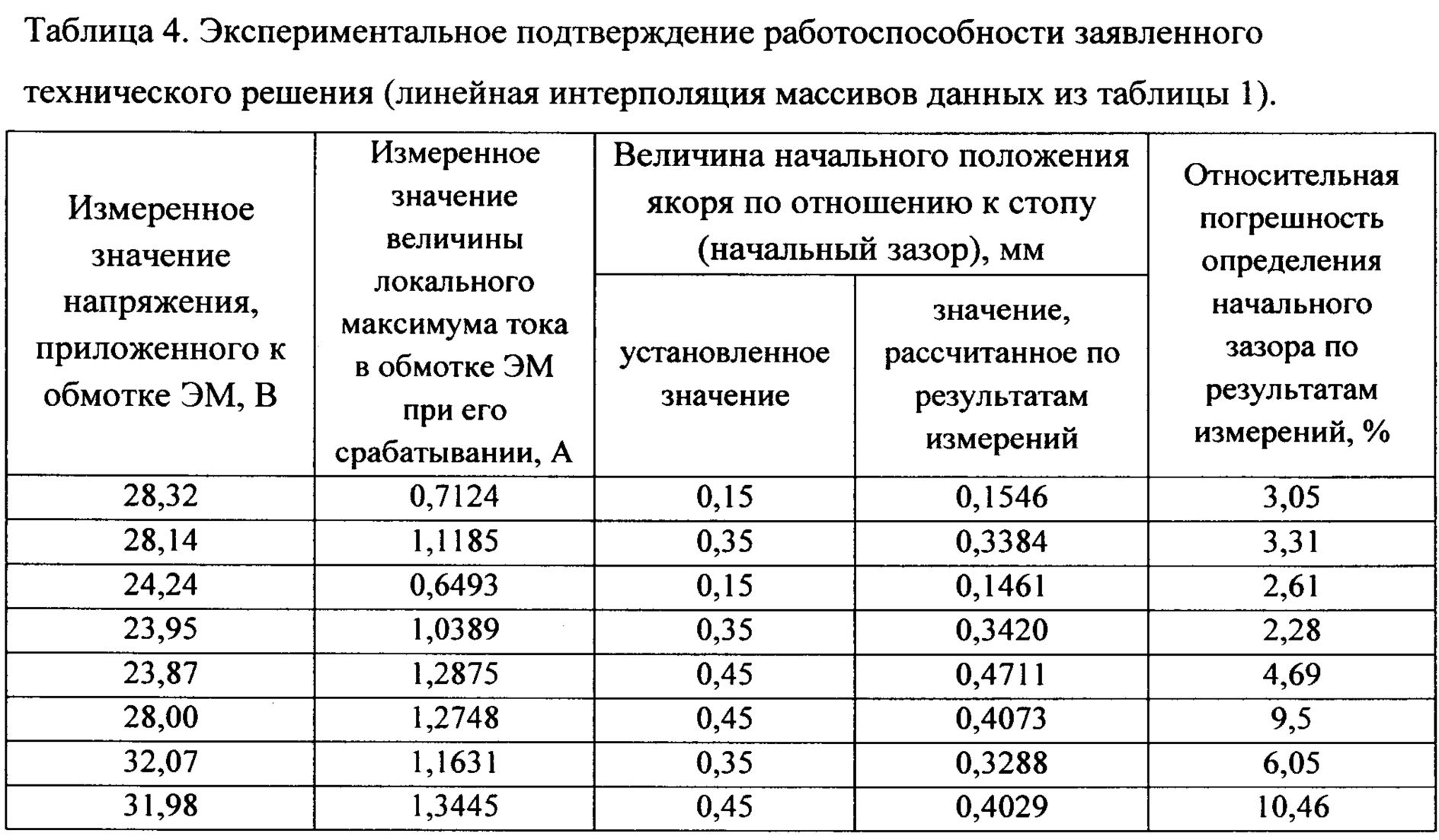
Для подтверждения работоспособности заявляемого технического решения были проведены экспериментальные работы по определению начального зазора, имевшего место перед подачей напряжения на обмотку ЭМ, для не вошедших в таблицу 1 промежуточных значений напряжений питания и выставляемых начальных зазоров. Полученные результаты приведены в таблицах 3 и 4. Данные по определению величины начального зазора, приведенные в таблице 3, получены с использованием линейной аппроксимации с использованием соотношений (1), (2) и (3) и измеренных экспериментально при срабатывании ЭМ значений приложенного напряжения и локального максимума тока в обмотке, которые приведены в той же таблице. В таблице 4 приведены данные определения величины начального зазора, полученные линейной интерполяцией экспериментальных данных из таблицы 1 для экспериментально измеренных значений приложенного напряжения и локального максимума тока в обмотке при срабатывании ЭМ.
Работоспособность заявляемого устройства подтверждается приведенным на фиг. 6 изображением окна, полученного на экране персонального компьютера и отражающего работу устройства. При получении этого изображения устройство было связано с персональным компьютером с помощью приемопередатчика RS-485 и конвертера RS-485 - USB. В приведенном на фиг. 6 изображении наряду с другой информацией о работе устройства отображаются текущие значения тока в обмотке ЭМ, напряжения питания и значение перемещения штока при срабатывании ЭМ, рассчитанное с использованием линейных аппроксимирующих зависимостей по соотношениям (1), (2) и (3). Для данного примера предварительно установленное значение начального зазора равнялось 0,35 мм.
Таким образом, из приведенных материалов описания предлагаемого изобретения следует, что решение поставленной задачи по расширению функциональных возможностей достигается тем, что кроме сигнала, свидетельствующего о произошедшем или нет срабатывании электромагнита, дополнительно формируется еще и сигнал, несущий информацию о значении перемещения штока ЭМ, имевшего место в процессе его срабатывания. Эта информация крайне полезна, например, при диагностике функционирования ЭМ и его настройке для решения конкретной задачи. Кроме того, обеспечивается снижение влияния дестабилизирущих факторов, возникающих при изменении напряжения питания ЭМ.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. METHOD AND CIRCUIT FOR DETECTING THE ARMATURE POSITION OF AN ELECTROMAGNET. US 6,949,923 B2. Date of Patent: Sep. 27, 2005.
2. METHOD AND APPARATUS FOR SENSING ARMATURE POSITION IN RELUCTANCE ELECTROMAGNETIC ACTUATORS. CANADIAN PATENT. CA 2247809 C. Date 2001/10/23.
3. SYSTEM FOR DETERMINING POSITIONS OFA CONTROL ELEMENT OF AN ELECTRICALLY DRIVEN ACTUATOR. US 2004/0016461 Al. Pub. Date: Jan. 29, 2004.
4. SYSTEMS AND METHODS FOR DETECTING SOLENOID ARMATURE MOVEMENT. US 2011/0149458 Al. Pub. Date: Jun. 23, 2011.
5. ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998 Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
6. http://www.ti.com/lit/ds/symlink/sn65hvd1785.pdf
7. http://www.microchip.com/support DS 40001819B.pdf
8. http//www.irf.com/part/INTELLIGENT-PO WER-S WITCH-1-CHANNEL-HIGH-SIDE-DRIWER-IN-TO-220FL-P.

Твердотопливный ракетный двигатель
Способ сборки газовода с эластичным шарниром
Клапан регулирования расхода газа
Способ подтверждения внутрибаллистических и энергетических характеристик твердотопливного заряда ракетного двигателя и стендовое устройство
Импульсный малогабаритный пороховой вытеснитель рабочей жидкости
Твердотопливный импульсный двигатель
Нагружающее устройство
Нагружающее устройство
Газораспределительный клапан
Узел соединения отделяемых частей летательного аппарата
Способ изготовления контактного электродного материала с контролируемой пористостью для батарей твердооксидных топливных элементов
Способ выплавки стали, легированной азотом
Способ формирования аудита персональной биометрической информации
Внутритрубный упругий микроробот с управляемой пьезоактюатором формой
Способ измельчения спеченных твердых сплавов
Премикс для кур-несушек второй фазы продуктивности
Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу usb и устройство для его осуществления
Магнитная клавиатура
Способ стабилизации уровня тока в обмотке двухфазного биполярного шагового двигателя в полношаговом режиме и драйвер для его осуществления
Способ определения момента достижения механического упора электроприводом с биполярным шаговым двигателем и устройство для его осуществления

