Результат интеллектуальной деятельности: Блок обнаружения препятствий маневрового локомотива
Вид РИД
Изобретение
Изобретение относится к электронным системам железнодорожных транспортных средств, и может быть использована в бортовой информационно-вычислительной системе маневрового локомотива для обнаружения препятствий на пути его движения.
Известен блок обнаружения препятствий на пути движения рельсового транспортного средства в составе бортовой информационной системы, содержащий блок датчиков технического зрения, включающий модуль первичной обработки данных, к которому подключены, по крайней мере, одна видеокамера, один лидар и один тепловизор, вычислительный блок, состоящий из вычислителя с подключенными к нему модулем комплексирования данных, нейросетью и блоком памяти, при этом вход вычислительного блока соединен с выходом модуля первичной обработки данных, а выход - через блок принятия решений с высокоскоростным CAN-E - интерфейсом (RU 2742960 C1, B61L 25/02, 12.02.2021).
Недостатком известного блока обнаружения препятствий является недостаточная надежность, поскольку при выходе из строя вычислительного блока или одного из сенсоров сам блок теряет работоспособность.
Наиболее близким аналогом является устройство обнаружения препятствий на пути движения рельсового транспортного средства содержащее для сканирования пространства впереди движущегося рельсового транспортного средства две группы камер, два лидара, тепловизор с высоким разряжением, ультразвуковые датчики, а также два модуля обработки данных и два коммутатора, при этом первая группа камер включает три видеокамеры с углами обзора соответственно 10°, 40° и 40°, вторая группа камер - четыре видеокамеры с углами обзора соответственно 14°, 14°, 65° и 65°, каждый модуль обработки данных содержит последовательно соединенные блок первичной обработки данных на базе графических ускорителей и вычислительный блок, выходом подключенный к сети Ethernet для взаимодействия бортовым оборудованием транспортного средства, при этом выходы камер первой группы подключены через первый коммутатор к соответствующему входу блока первичной обработки первого модуля принятия решений, выходы камер второй группы - через второй коммутатор к соответствующему входу блока первичной обработки второго модуля принятия решений, выход тепловизора соединен с соответствующим входом блока первичной обработки первого блока принятия решений, к соответствующим входам каждого блока первичной обработки данных подключены выходы соответствующих ультразвуковых датчиков и одного из лидаров, вычислительные блоки взаимодействуют друг с другом непосредственно, а через сеть Ethernet взаимодействуют с бортовым оборудованием транспортного средства, программное обеспечение вычислительных блоков выполнено с возможностью выделения препятствий по данным первичной обработки данных камер, лидаров, тепловизора и ультразвуковых датчиков, с последующим комплексированием данных для определения координат препятствия и формирования соответствующего сообщения для передачи его по сети Ethernet бортовому оборудованию транспортного средства (RU 212718 U1, B61L29/00, 03.08.2022).
Недостатком известного устройства является недостаточная надежность, поскольку при выходе из строя одного из модуля принятия решений или коммутатора изделие перестает получать данные сразу от двух типов камер с двумя разными углами обзора, ввиду отсутствия их резервирования на втором модуле принятия решений, что приводит к потере контроля обнаружения объектов в двух зонах камерами машинного зрения.
Кроме того, известное устройство позволяет обнаружить препятствия только на пути движения вперед транспортного средства.
Задача изобретения заключается в создании блока обнаружения препятствий маневрового локомотива, обеспечивающего безопасность проводимых на станции маневровых работ.
Технический результат предлагаемого изобретения заключается в увеличении зон покрытия, в том числе покрытия мертвой зоны, а также повышение эффективности обнаружения препятствий за счет использования дополнительного сенсора в модуле верхних сенсоров.
Технический результат достигается тем, что блок обнаружения препятствий маневрового локомотива содержит модули сенсоров верхних, модули сенсоров нижних, вычислительный модуль, включающий два взаимодействующих друг с другом вычислителя, каждый из которых подключен к бортовой сети питания локомотива через соответствующий преобразователь, и навигационный модуль, выходом соединенный с соответствующим входом вычислителей, входы/выходы каждого из которых соединены с выходами/входами модулей сенсоров верхних и модулей сенсоров нижних, при этом каждый модуль сенсоров верхних включает две камеры машинного зрения, IP камеру контроля мертвой зоны и лидар, которые с антеннами навигационного модуля и установлены в соответствующем пыле-влагозащищенном коммутационном боксе, а каждый модуль сенсоров нижних - по меньшей мере один лидар, размещенный в соответствующем консольном коммутационном боксе, причем на каждой стороне маневрового локомотива установлены бокс с модулем сенсоров нижних и бокс с модулем сенсоров верхних, первый из которых установлен на торце нижней части локомотива по центру его оси над автосцепкой, а второй - на крыше локомотива по центру его оси или встроен в капот, программное обеспечение каждого из вычислителей обеспечивает сбор данных, полученных от модулей сенсоров нижних и модулей сенсоров верхних, их обработку в соответствии с алгоритмом обнаружения препятствий, включающим последовательное выполнение этапов фильтрации данных сенсоров,определение собственных координат, скорости и направление движения маневрового локомотива, препятствий и их местоположение относительно рельсовой колеи с последующей классификацией препятствий и зоны местонахождения препятствия относительно оси пути следования по ходу движения, формирование сообщений для передачи в микропроцессорную систему управления и бортовое устройство безопасности, причем вычислители взаимодействуют с бортовыми система посредством бортовой шины обмена, а с внешними системами управления – посредством канала передачи данных.
Для повышения эффективности обнаружения людейна пути движения маневрового локомотива каждый модуль сенсоров верхних дополнительно включает тепловизор.
Для зашиты от воздействия внешней сенсоры модуля сенсоров верхних закрыты вентилируемой воздушными потоками маской.
Для повышения точности выполнения маневровых операций дополнительно включает ультразвуковые датчики, установленные на каждой стороне маневрового локомотива, и два модуля обработки сигналов, каждый из которых размещен в соответствующем консольном коммутационном боксе и включен между выходами/входами соответствующих ультразвуковых датчиков и другими входами/выходами каждого вычислителя. Предпочтительное количество установленных на каждой стороне маневрового локомотива ультразвуковых датчиков равно четырем.
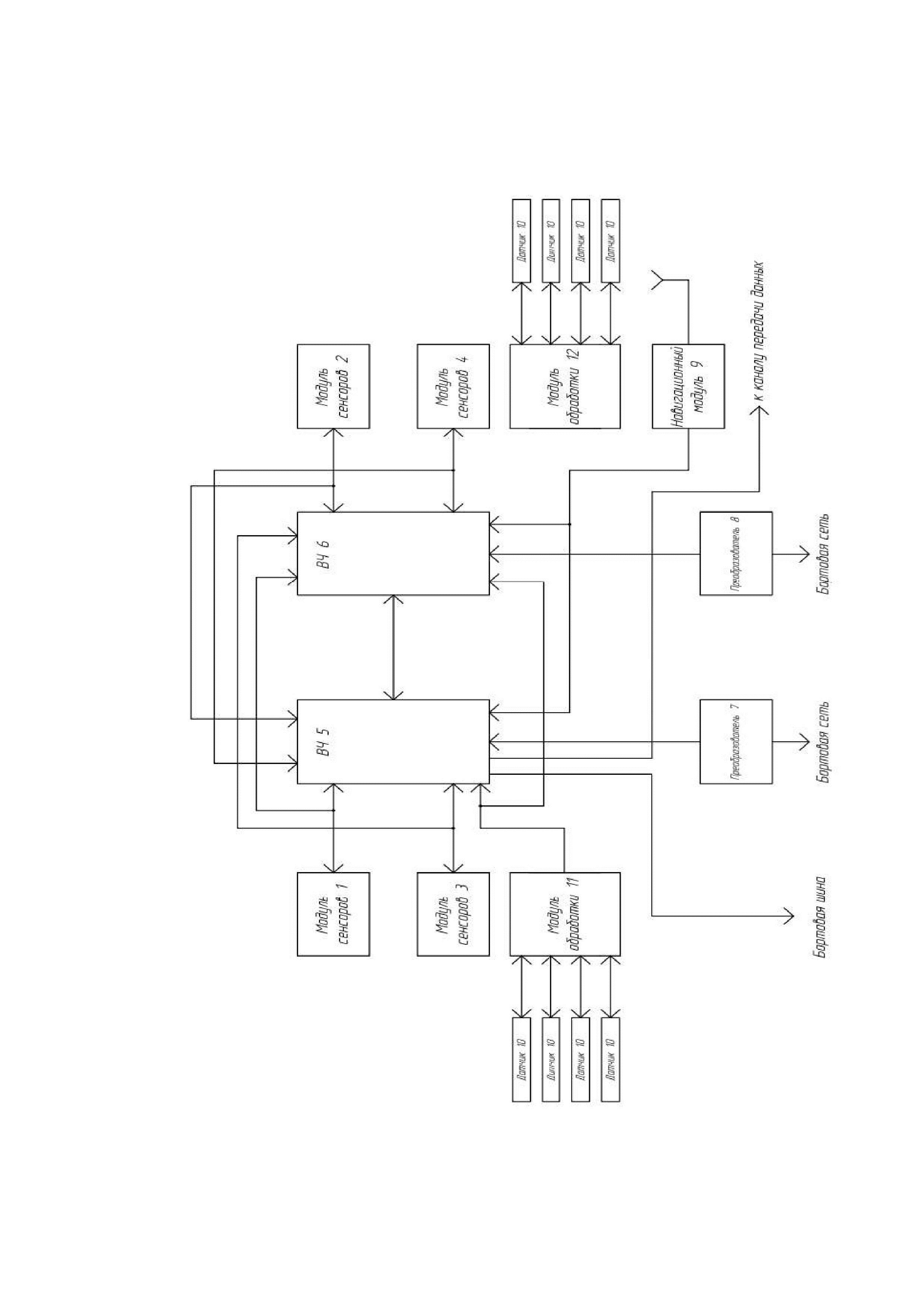
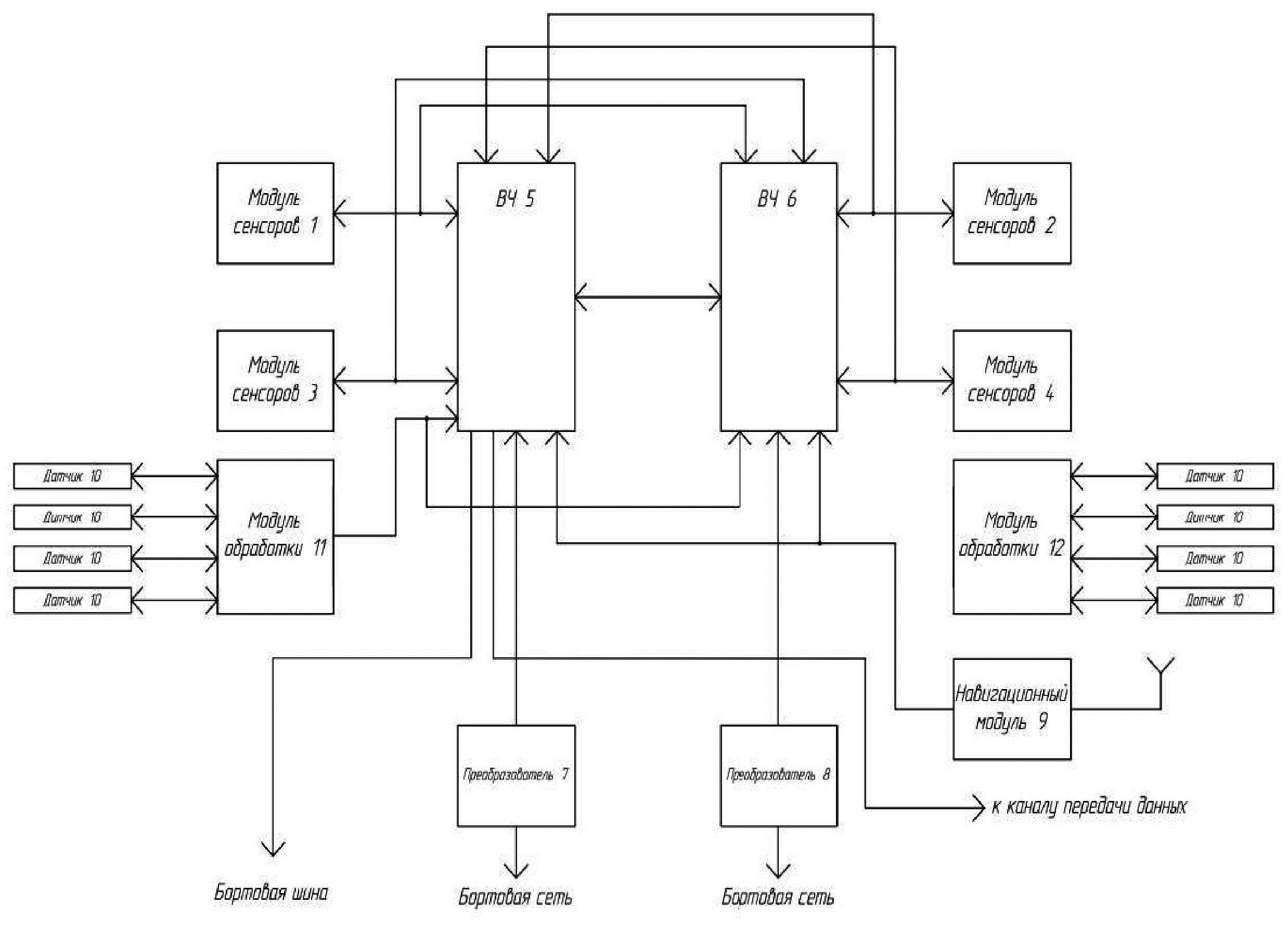
Существо предложения поясняется чертежом, на котором представлена структурная схема одного из вариантов предлагаемого блока обнаружения препятствий маневрового локомотива.
Блок обнаружения препятствий маневрового локомотива (БОПМЛ) содержит модули 1 и 2 сенсоров верхних, модули 3 и 4 сенсоров нижних, вычислительный модуль, включающий два взаимодействующих друг с другом вычислителя 5 и 6 на базе промышленного компьютера, каждый из которых подключен к бортовой сети питания локомотива через соответствующий преобразователь 7 и 8, и навигационный модуль 9, выходом соединенный с соответствующим входом вычислителей 5 и 6, входы/выходы каждого из которых соединены с выходами/входами модулей 1 и 2 сенсоров верхних и модулей 3 и 4 сенсоров нижних.
Каждый модуль 1 (2) сенсоров верхних включает две камеры машинного зрения, IP камеру контроля мертвой зоны и лидар, установленные в пыле-влагозащищенном коммутационном боксе с узлами крепления для каждого из них, в котором размещена также антенна навигационного модуля 9 , а каждый модуль 3 (4) сенсоров нижних - лидар, размещенный в консольном коммутационном боксе, закрытом защитным кожухом.
БОПМЛ включает ультразвуковые датчики 10, установленные на каждой стороне маневрового локомотива, и два модуля 11 и 12 обработки сигналов, каждый из которых размещен в соответствующем консольном коммутационном боксе и включен между выходами/входами соответствующих ультразвуковых датчиков 10 и другими входами/выходами каждого вычислителя 5 и 6. Предпочтительное количество установленных на каждой стороне маневрового локомотива ультразвуковых датчиков 10 равно четырем.
При этом на каждой стороне маневрового локомотива установлены бокс с модулем 3 (4) сенсоров нижнихи бокс с модулем 1(2) сенсоров верхних, первый из которых установлен на торце нижней части локомотива по центру его оси над автосцепкой, а второй - на крыше локомотива по центру его оси или встроен в капот.
Программное обеспечение каждого из вычислителей 5 и 6 обеспечивает сбор данных, полученных от модулей 1 и 2 сенсоров нижних и модулей 3 и 4 сенсоров верхних, их обработку в соответствии с алгоритмом обнаружения препятствий, включающий последовательное выполнение этапов фильтрации данных сенсоров, определение собственных координат, скорости и направление движения маневрового локомотива, препятствий и их местоположение относительно рельсовой колеи с последующей классификацией препятствий и зоны местонахождения препятствия относительно оси пути следования по ходу движения, формирование сообщений для передачи в микропроцессорную систему управления и бортовое устройство безопасности. Вычислители 5 и 6 взаимодействуют с бортовыми система посредством бортовой шины обмена, а с внешними системами управления – посредством канала передачи данных.
Электропитание БОПМЛ осуществляется от бортовой сети электропитания по одному каналу посредством преобразователей 7 и 8.
БОПМЛ функционирует следующим образом.
В зависимости от направления движения маневрового локомотива и выполнения работ с прицепленными к нему подвижными единицами в режиме реального времени сенсоры соответствующих модулей 1,2,3,4 и соответствующие ультразвуковые датчики 10 сканируют пространство или перед маневровым локомотивом или сзади маневрового локомотива или сзади и спереди. Данные о ситуации, например, о нахождении людей на пути и/или движущихся объектах и\или объектах инфраструктуры вдоль пути в габарите маневрового локомотивапо результатам сканирования сенсорами соответственно модулей 1 и 3 или 2 и 4 или 1-4 поступают в вычислители 5 и 6.
При этом данные четырех ультразвуковых датчиков 10, установленных впереди маневрового локомотива, поступают в каждый вычислитель 5 и 6 через модуль 11 обработки, а данные четырех ультразвуковых датчиков 10, установленных сзади локомотива, – через модуль 12 обработки.
Посредством данных сенсоров модулей 1-4 и ультразвуковых датчиков 10 каждый вычислитель 5 и 6 осуществляет сбор информации о контролируемых зонах, о наличие препятствиях в каждой контролируемой зоне, показаниях светофоров, а также подвижном составе, с которым необходимо осуществить сцепку. При этом происходит дублирование информационного потока и перекрытие возможных слепых зон.
Кроме того, в режиме реального времени в каждый вычислитель 5 и 6 с выхода навигационного модуля 9 поступает также информация о координатах местоположения маневрового локомотива.
Вычислители 5 и 6 последовательно осуществляют на основании полученных данных первичную обработку, состоящую из следующих действий:
- сегментацию железнодорожных путей с последующей их фильтрацией для формирования зон габарита пути и опасной зоны, исходя из известных физических величин габаритов колеи и параметров зон; детектирование объектов с помощью нейронной сети;
- вычисление трехмерных характеристик объектов;
-определение зоны потенциального объекта и фильтрацию ложных срабатываний;
- фильтрацию ложных срабатываний по следующим признакам: допустимая высота, допустимая дистанция до объекта, достоверность существования препятствия в зависимости от его места положения: для препятствия на пути, для препятствия в габарите пути, для препятствия в зоне повышенной бдительности;
-сохранение кадра с обнаруженными объектами в какой-либо из зон;
- формирование выходного сообщения, включающее (при его наличии) препятствие в выделенных зонах, флаги наличия препятствий и максимальная по удаленности точка обнаружения колеи.
Каждый вычислитель 5 и 6 осуществляет регистрацию препятствий по результатам первичной обработки данных сенсоров модулей 1-4 и ультразвуковых датчиков 10 с последующим комплексированием данных для определения координат препятствия относительно местоположения маневрового локомотива и формирования соответствующего сообщения для передачи его посредством бортовой шины обмена данных бортовому оборудованию маневрового локомотива.
Для реализации задач детектирования объектов по данным лидаров модулей 1 - 4 каждый вычислитель 5 и 6 используетклассический метод и нейронную сеть BEVDetNet [Sambit Mohapatra, Heinrich Gotzig (Valeo Germany), Senthil Yogamani (Valeo Ireland), Stefan Milz (SpleenLab.ai, Germany), and Patrick Mader (TU Ilmenau, Germany). BEVDetNet: Bird’s Eye View LiDAR Point Cloud based Real-time 3D Object Detection for Autonomous Driving - https://arxiv.org/pdf/2104.10780.pdf ].
Дляобнаруженияиклассификацииобъектовподаннымкамермодулей 1-4 каждыйвычислитель 5 и 6 напервомэтапеиспользуютсегментациюизображенийспомощьюархитектурынейроннойсети SegFormer [Enze Xie, Ping Luo (The University of Hong Kong) , Wenhai Wang (Nanjing University) , Zhiding Yu, Jose M. Alvarez, Jose M. Alvarez (NVIDIA), Anima Anandkumar (NVIDIA, Caltech). SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers.], затемдетекциюкаждогосегментаизображенияспомощьюнейроннойсети EfficientNet-Liteb3 [Mingxing Tan, Quoc V. Le . EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks] споследующейклассификациейобъектеспомощьюнейроннойсети YoloV5 [Joseph Redmon (University of Washington) , Santosh Divvala, Ali Farhadi (University of Washington, Allen Institute for AI), Ross Girshick (Facebook AI Research). You Only Look Once: Unified, Real-Time Object Detection. http://pjreddie.com/yolo/ ].
При этом вычислители 5 и 6 взаимодействуют друг с другом для агрегирования данных о препятствиях и проверки работоспособности друг друга.
Таким образом, предлагаемый блок обнаружение препятствий маневрового локомотива осуществляет обнаружение препятствий на необходимом участке пути, агрегируя данные от множества независимых сенсоров, позволяет сохранять работоспособность в случае отказа отдельных сенсоров.
Система интервального регулирования движения поездов на базе радиоканала
Устройство построения прогнозных энергосберегающих графиков движения поездов
Устройство позиционирования транспортных средств
Способ гарантированного электропитания двух рядом расположенных объектов железнодорожной инфраструктуры
Система для резервного электропитания объектов железнодорожной автоматики, телемеханики и связи
Измеритель модуля скорости
Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты
Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ
Устройство для контроля проследования поезда в полном составе
Автономный пункт счета осей
Устройство для обеспечения информационного обмена между автоматизированной системой управления движением и локомотивным устройством безопасности
Система для оперативной передачи предупреждений и электронных карт на высокоскоростной поезд
Пост комплексного контроля дефектов буксовых узлов и колес движущихся вагонов
Устройство мониторинга рельсового транспортного средства и магнитоэлектрический генератор
Бортовое навигационное коммуникационное устройство
Стационарный комплекс обнаружения препятствий в области ограниченной видимости
Съемное многооборотное средство крепления для перевозки крупнотоннажных контейнеров на универсальных вагонах-платформах
Система связи и дистанционного управления для скоростного электропоезда

