Результат интеллектуальной деятельности: Способ астроориентации орбитального космического аппарата (варианты)
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано для ориентирования космического аппарата (КА) относительно орбитальной (ОСК) и программной (ПСК) систем координат с использованием датчика звезд (ДЗ).
Известены способы орбитальной ориентации КА, приведенные в книге авторов В.Н. Бранец, И.П. Шмыглевский «Применение кватернионов в задачах ориентации твердого тела». Москва, Наука 1973 г., 320 с. (см. стр. 205-226), где рассматриваются только общетеоретические аспекты ориентации КА.
Известен способ, изложенный в статье «Система ориентации и стабилизации космического аппарата по информации с астродатчиков», Электронный журнал «Труды МАИ». Выпуск №38, в котором изложены результаты летных испытаний, но не недостаточно раскрыты существенные признаки способа.
В книге авторов О.Н. Анучин, И.Э. Комарова, Л.Ф. Перфильев «Бортовые системы навигации и ориентации искусственных спутников Земли» - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2004 г. приводится большое количество методов ориентации твердого тела без конкретизации рабочего алгоритма астроориентации.
В книге Системы астрономической ориентации космических аппаратов/ В.И. Кочетков - Москва.: Машиностроение, 1980 рассматриваются способы астрокоррекции для систем с гиростабилизированными платформами, что малопригодно для систем ориентации современных КА.
Наиболее близким способом, который может быть принять за прототип, является способ, изложенный в патенте RU 2610766. Способ содержит общие признаки с предлагаемым техническим решение, которые заключаются в расчете по данным аппаратуры спутниковой навигации матрицы А положения ОСК относительно инерциальной системы координат (ИСК), фиксированное измерение датчиком звезд (ДЗ) положения связанной системы координат (ССК) относительно ИСК и получение от блока гироскопических измерителей угловых скоростей (БИУС) данных о проекциях абсолютной угловой скорости КА ωg(p,q,r) на оси ССК.
Недостатком способа является то, что ДЗ измеряет положение КА относительно ИСК только вначале процесса ориентации, а сама ориентация выполняется относительно «замороженной» ОСК, что приводит к большим ошибкам ориентации КА относительно изменяющейся во времени ОСК по завершению процесса ориентации. Ошибки могут достигать десятков градусов, т.к. ошибка на одном цикле включения пропорциональна величине орбитальной угловой скорости КА и расчетного времени приведения КА к ОСК. По этой причине применяют повторные включения режима приведения, что снижает общую погрешность ориентации, но все же не достигают требуемой точности, которая для современных систем ориентации должна находиться на уровне нескольких угловых секунд по углу и на уровне 0,001-0,0001°/с по угловой скорости в номинальном и программном положениях.
Техническим результатом предлагаемого технического решения является повышение точности ориентации КА относительно ОСК.
В отличие от известного способа астроориентации, который включает расчет по данным аппаратуры спутниковой навигации (АСН) матрицы А положения орбитальной системы координат (ОСК) относительно инерциальной системы координат (ИСК), фиксированное определение датчиком звезд (ДЗ) матрицы - Мro ориентации связанной системы координат (ССК) относительно ИСК и измерение блоком гироскопических измерителей угловых скоростей (БИУС) текущей абсолютной угловой скорости КА в проекциях на оси связанной системы координат (ССК) - ωg(p,q,r) с последующей корректировкой положения ССК относительно ОСК, выполняют новые операции. Принимают данные баллистического расчета о скорости вращения ОСК относительно ИСК ωo(ωхо, ωуо, ωzo), измеряют датчиком звезд текущие значения матрицы (кватерниона) Мro ориентации ССК относительно ИСК, рассчитывают в бортовом вычислителе скорость вращения ССК относительно ОСК по формуле  (Т - знак транспонирования) и ее интегрированием матрицу S - ориентации ССК относительно ОСК, из полученных решений находят компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями:
(Т - знак транспонирования) и ее интегрированием матрицу S - ориентации ССК относительно ОСК, из полученных решений находят компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями:
θx=S23 - S32, θy=S31-S13, θz=Sn-S2l,
 где
где  - элементы матриц
- элементы матриц  создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент векторов конечного поворота
создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент векторов конечного поворота  и поворачивают КА до совмещения связанной и орбитальной систем координат.
и поворачивают КА до совмещения связанной и орбитальной систем координат.
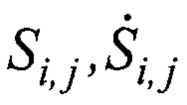
На фиг. 1 приведена иллюстрация способа ориентации, где показано приведение КА в ОСК из начального положения относительно ОСК по курсу ψ(0)=+70°, тангажу ϑ(0)=-70° и по крену γ(0)=+120° при начальных нулевых скоростях относительно ИСК ωg(p,q,r)=0 (с погрешностью до собственного дрейфа гироскопов БИУС).
Параметры КА:
- масса 350 кг,
- орбита околокруговая, высота 500 км,
- закон стабилизации - пропорциональный: 
где kx=0,562 н/рад, 
ky=8,310 н/рад, 
kz=8,600 н/рад, 
Из приведенных графиков наглядно виден переходный процесс приведения КА в ОСК, который завершается за время менее 50 с.
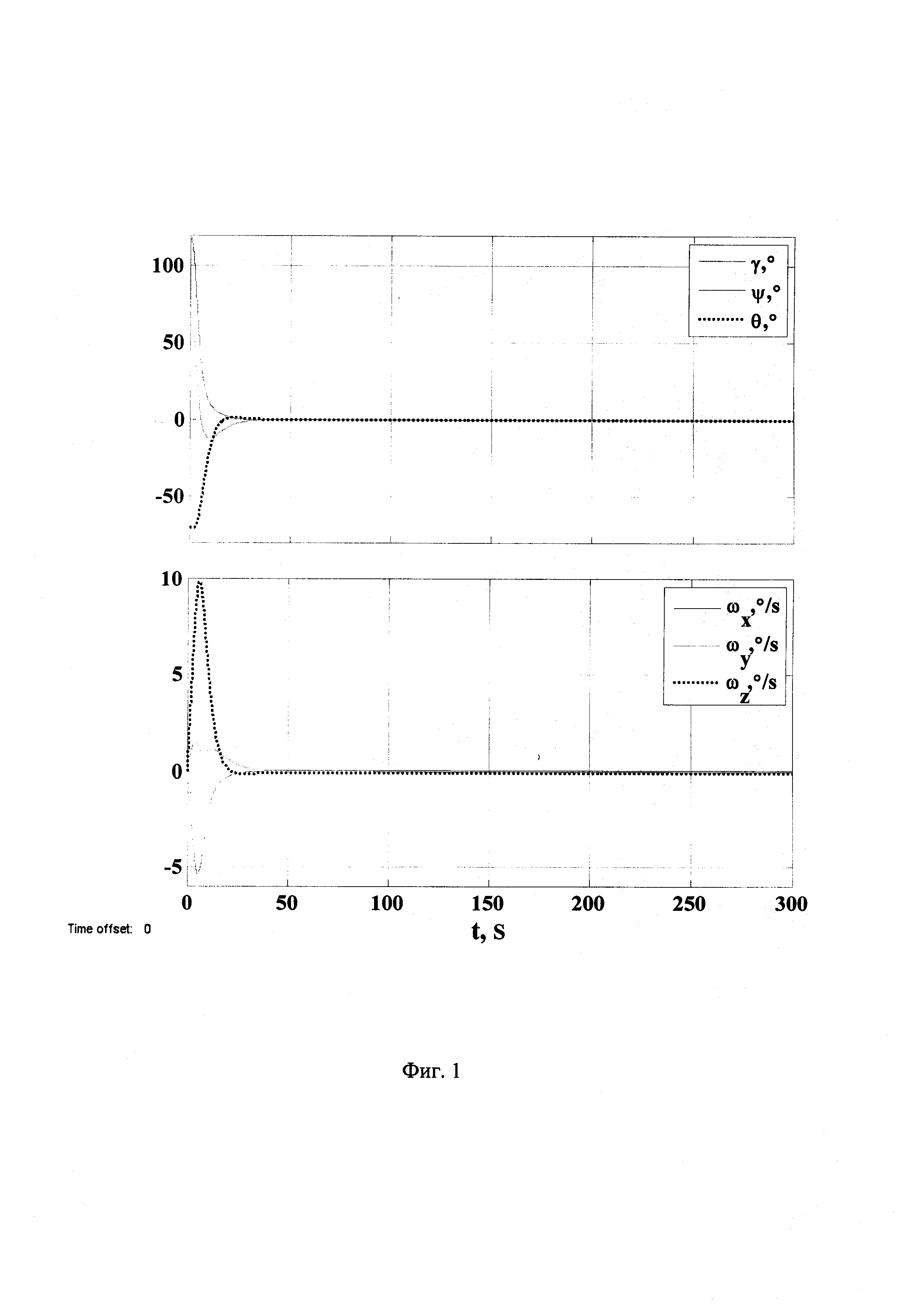
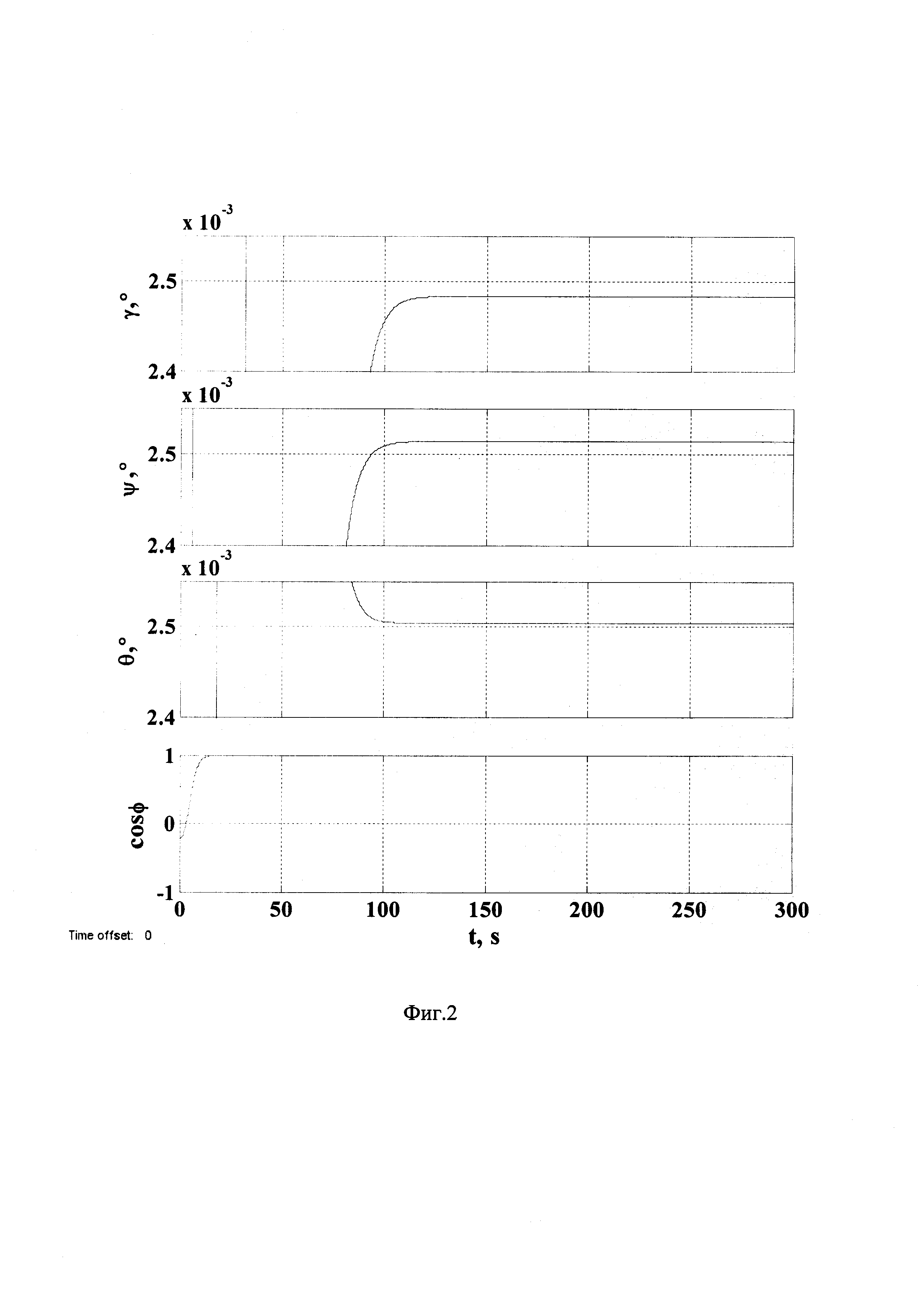
На фиг. 2 показан тот же процесс в увеличенном масштабе. Как следует из приведенных графиков, погрешность ориентации в конце приведения не хуже 10 угловых секунд. Переходные процессы приведения КА в ОСК по скорости приведены на фиг. 3, погрешность приведения КА по скорости не превышает значений 0,0002°/с, что соответствует требованиям высокоточной ориентации КА.
В способе по п. 2 достигается обратная задача - угловое перемещение КА в заранее предписанное (программное) положение относительно ОСК.
Этот способ отличается тем, что задают программное движение КА относительно ОСК в форме программных углов по курсу ψp{t), тангажу ϑ(t) и крену γp{t) и соответствующих им программных угловых скоростей -  рассчитывают в бортовом вычислителе скорость вращения ССК относительно программной системы координат (ИСК) по формуле
рассчитывают в бортовом вычислителе скорость вращения ССК относительно программной системы координат (ИСК) по формуле  и ее интегрированием - матрицу С ориентации ССК относительно ПСК, где ωр, ωo, ωg - кососимметрические матрицы, причем текущие компоненты программной скорости ωр(ωpx, ωpy, ωpz) непрерывно рассчитываются в бортовом вычислителе по формуле
и ее интегрированием - матрицу С ориентации ССК относительно ПСК, где ωр, ωo, ωg - кососимметрические матрицы, причем текущие компоненты программной скорости ωр(ωpx, ωpy, ωpz) непрерывно рассчитываются в бортовом вычислителе по формуле  - векторы столбцы, а Р=РψРϑРγ - матрицы плоских программных поворотов КА по курсу, тангажу и крену, вычисляют компоненты вектора конечного поворота Эйлера и их производные по формулам:
- векторы столбцы, а Р=РψРϑРγ - матрицы плоских программных поворотов КА по курсу, тангажу и крену, вычисляют компоненты вектора конечного поворота Эйлера и их производные по формулам:
ϕx=C23-C32, ϕy=С31-С13, ϕz=С12-С21,
 - элементы матриц
- элементы матриц  создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент вектора конечного поворота
создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент вектора конечного поворота  и поворачивают КА до совмещения связанной и программной систем координат.
и поворачивают КА до совмещения связанной и программной систем координат.
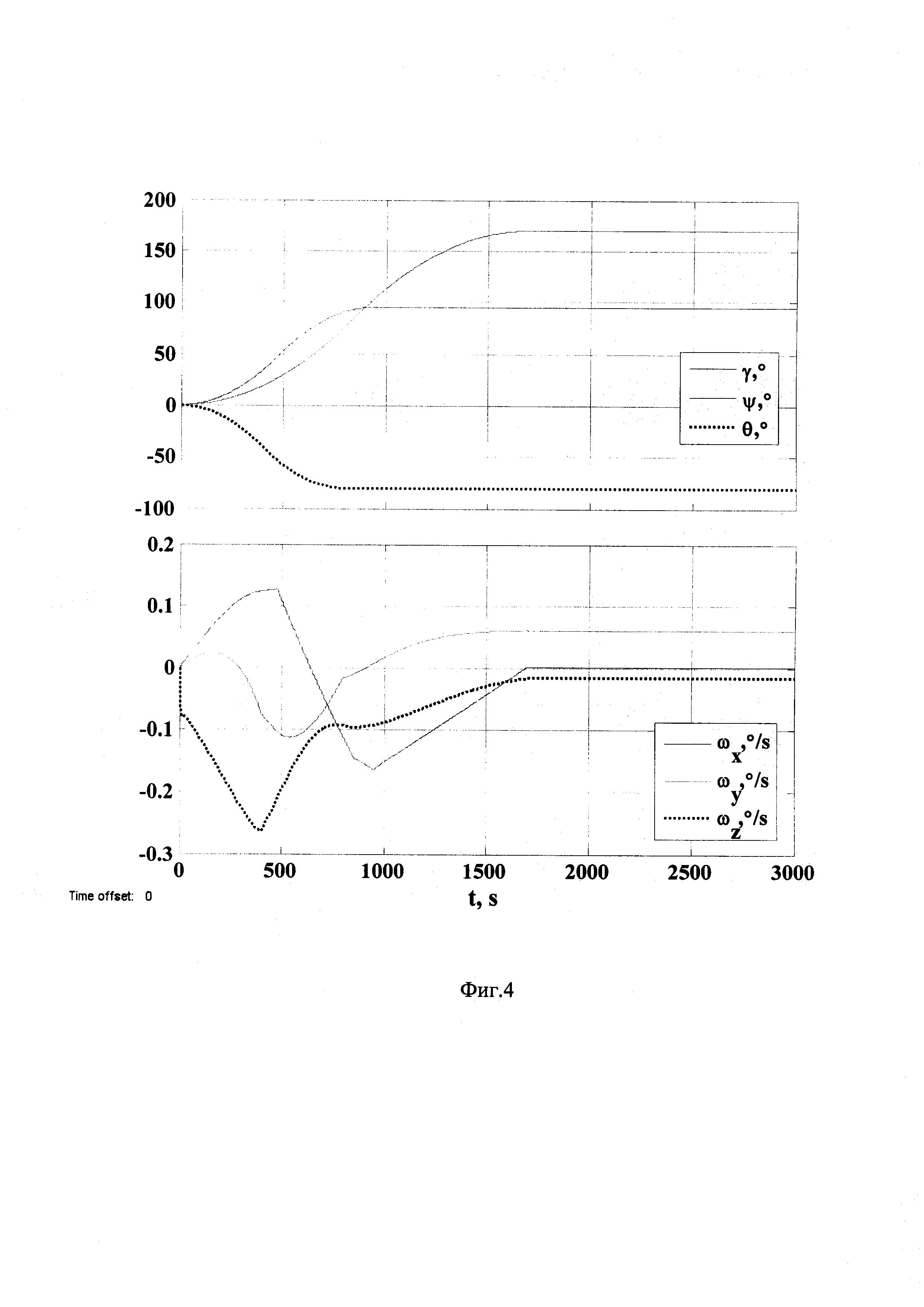
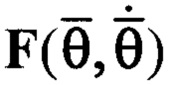
На фиг. 4 показан пример программного поворота КА относительно ОСК по курсу ψ(0)=+170°, тангажу ϑ(0)=-80° и крену γ(0)=+95°.
КА выполнил качественный и точный программный поворот. Время переходного процесса составило 1700 с, погрешность программного поворота по углу составила ≤40 угловых секунд, по угловой скорости ≤0,001°/с (фиг. 5).
Таким образом, предлагаемая система астроориентации позволяет выполнять функции приведения КА в ОСК из неориентированного положения и переводить КА в требуемое программное положение относительно ОСК. Обе функции выполняются с высоким качеством переходного процесса и высокой точностью ориентации КА относительно ОСК и ПСК как по углу, так и по угловой скорости.






Автоматическая система загрузки ракет в самоходную пусковую установку
Стенд для испытаний шарнирных подшипников
Раскрываемый руль
Термоэмиссионный способ тепловой защиты частей летательных аппаратов
Способ одновременного выведения группы спутников на некомпланарные орбиты (варианты)
Защитная панель летательного аппарата
Корпус гиперзвукового летательного аппарата и способ его изготовления
Способ управления полетом ракеты
Обслуживаемый на орбите автоматический космический аппарат
Способ определения коэффициента трения подшипника
Бесплатформенный орбитальный гирокомпас с произвольной курсовой ориентацией космического аппарата
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Устройство управления положением космического аппарата в пространстве с использованием орбитального гирокомпаса
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Способ коррекции и устройство орбитального гирокомпаса для управления угловым движением космического аппарата
Способ компенсации ошибок орбитального гирокомпаса
Система управления пространственной ориентацией космического аппарата с использованием бесплатформенного орбитального гирокомпаса
Гирокомпас для орбитальных космических аппаратов
Способ восстановления ориентации орбитального космического аппарата
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными

