Результат интеллектуальной деятельности: ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области космической техники, а точнее к орбитальным гирокомпасам (ОГК), и предназначено для применения в системах ориентации орбитальных космических аппаратов (КА), где требуется обеспечить космическому аппарату свободу программных поворотов одновременно по каналам курса, тангажа и крена относительно орбитальной системы координат (ОСК) без потери устойчивости и точности ориентации.
Орбитальные гирокомпасы (ОГК) нашли широкое применение, т.к. имеют простую структуру, обладают автономностью, удобны при восстановлении ориентации КА.
Классический ОГК имеет вид:

где β,  , α,
, α,  , θ,
, θ,  - углы и угловые скорости ориентации приборной системы координат ОГК относительно орбитальной системы координат (ОСК) по крену, курсу и тангажу;
- углы и угловые скорости ориентации приборной системы координат ОГК относительно орбитальной системы координат (ОСК) по крену, курсу и тангажу;
γП, ϑП - выходные сигналы построителя местной вертикали (ПМВ) по крену и тангажу;
Δβ, Δθ - сигналы обратных связей и они же выходные сигналы ОГК в систему стабилизации (СС) КА по крену и тангажу;
 - орбитальная угловая скорость КА (производная от изменения аргумента широты (u);
- орбитальная угловая скорость КА (производная от изменения аргумента широты (u);
к1, к2, к3 - коэффициенты коррекции.
Указанный тип ОГК описан во многих источниках, например, в кн.: «Орбитальное гирокомпасирование» авторов В.А. Бесекерского, В.А. Иванова и Б.Б. Самотокина. СПб. Политехника, 1993. 256 с.
Для практической реализации ОГК (1) используются обращенные формулы:

где ωX, ωY, ωZ - угловые скорости КА относительно инерциальной системы координат (ИСК) в проекциях на связанные оси КА по крену, курсу и тангажу, измеряемые гироскопическими датчиками;
Δβ,  , Δα,
, Δα,  , Δθ,
, Δθ,  - выходные сигналы ОГК в систему стабилизации КА по углам и угловым скоростям в каналах крена, курса и тангажа.
- выходные сигналы ОГК в систему стабилизации КА по углам и угловым скоростям в каналах крена, курса и тангажа.
Формулы (1)-(2) справедливы для малых отклонений связанных осей КА и приборных осей ОГК относительно ОСК. Иногда уравнения (2) называют наблюдателем ОГК.
ОГК, имеющий алгоритм в форме (2), так же описан во многих отечественных и зарубежных аналогах, например, в работе авторов А. Брайсона и В. Кортюма «Вычисление местного углового положения орбитального космического аппарата». Труды III Международного симпозиума ИФАК по автоматическому управлению в мирном использовании космического пространства. Управление в космосе, т. 2, с. 83-105, М., «Наука», 1972 г.
Недостатком указанных выше ОГК является запрет на программные повороты КА относительно ОСК на углы курса, тангажа и крена, что непосредственно следует из (2) и что явилось причиной их ограниченного применения.
Наиболее близким аналогом является орбитальный гирокомпас, защищенный патентом РФ №2509690, в котором реализовано устройство, позволяющее вращать КА на неограниченные программные углы по курсу, сохраняя при этом режим гирокомпасирования. Недостатком этого ОГК является принципиальное отсутствие возможности программных поворотов КА одновременно по всем каналам ориентации - крену, курсу и тангажу.
Целью изобретения является создание такого гирокомпаса, который, сохраняя свойство орбитального гирокомпаса, обеспечивает КА свободу программных поворотов одновременно по каналам курса, тангажа и крена относительно ОСК без потери устойчивости и точности ориентации.
С этой целью в известное решение, содержащее в канале крена последовательно соединенные ПМВ, первый сумматор, первый модуль усиления и преобразования (МПУ), второй сумматор и первый интегратор, сигналы выхода и входа которого являются входами в СС КА канала крена соответственно по углу и угловой скорости, содержащий в канале курса последовательно соединенные второй МПУ, третий сумматор и второй интегратор, сигналы выхода и входа которого являются входами в СС КА канала курса соответственно по углу и угловой скорости, содержащий в канале тангажа последовательно соединенные ПМВ, четвертый сумматор, третий МПУ, пятый сумматор и третий интегратор, сигналы выхода и входа которого являются входами в систему СС КА канала тангажа соответственно по углу и угловой скорости, а так же блок гироскопических измерителей угловых скоростей (БИУС), расположенных по связанным осям КА, выходы которых по каналам крена, курса и тангажа подключены соответственно ко вторым входам второго, третьего и пятого сумматоров, введены новые устройства и связи.
Введены модуль контроля курса в канале крена (МКК-К), первый вход которого соединен с выходом первого сумматора и выполняющий функцию:

где µ - угол программного поворота КА по тангажу относительно ОСК;
λ - угол программного поворота КА по курсу относительно ОСК,
и модуль контроля курса в канале тангажа (МКК-Т), первый вход которого соединен с выходом четвертого сумматора и выполняющий функцию:

где ε - угол программного поворота КА по крену относительно ОСК;
λ - угол программного поворота КА по курсу относительно ОСК,
введены блок задания программных движений (БЗПД) и модуль расчета программных движений (МРПД), вход которого подключен к выходу БЗПД и выполняющий функцию:


где  ,
,  ,
,  - расчетные значения программных угловых скоростей КА относительно ИСК по связанным осям крена, курса и тангажа КА;
- расчетные значения программных угловых скоростей КА относительно ИСК по связанным осям крена, курса и тангажа КА;
λ,  , µ,
, µ,  , ε,
, ε,  - расчетные значения углов и соответствующих им скоростей программных поворотов КА относительно ОСК по курсу, тангажу и крену соответственно по заданным значениям из БЗПД;
- расчетные значения углов и соответствующих им скоростей программных поворотов КА относительно ОСК по курсу, тангажу и крену соответственно по заданным значениям из БЗПД;
 - скорость прецессии линии узлов (прецессия орбиты) относительно инерциального пространства, задаваемой из БЗПД;
- скорость прецессии линии узлов (прецессия орбиты) относительно инерциального пространства, задаваемой из БЗПД;
i - угол наклона плоскости орбиты к плоскости экватора Земли, задаваемого из БЗПД;
u - аргумент широты положения КА на орбите, задаваемого из БЗПД,
а также введен модуль компенсации взаимовлияния каналов ориентации (МКВК) с матричной передаточной функцией:

таким образом, что его первый, второй и третий входы включены в выходные цепи соответственно второго, третьего и пятого сумматоров, его четвертый, пятый и шестой входы подключены к выходам соответственно первого, второго и третьего интеграторов, а его первый, второй и третий выходы подключены к входам соответственно первого, второго и третьего интеграторов, при этом первый, второй и третий выходы МРПД, соответствующие программным скоростям КА в каналах крена, курса и тангажа, подключены соответственно к третьим входам второго, третьего и пятого сумматоров и они же подключены к седьмому, восьмому и девятому входам МКВК, четвертый выход МРПД, соответствующий программному углу курса, подключен одновременно ко вторым входам МКК-К и МКК-Т, пятый выход МРПД, соответствующий программному углу крена, подключен одновременно к третьему входу МКК-Т и третьему входу первого сумматора, шестой выход МРПД, соответствующий программному углу тангажа, подключен к третьему входу МКК-К и третьему входу четвертого сумматора, а выходы МКК-К и МКК-Т подключены соответственно к первому и второму входам вновь введенного шестого сумматора, выход которого соединен с входом второго МПУ.
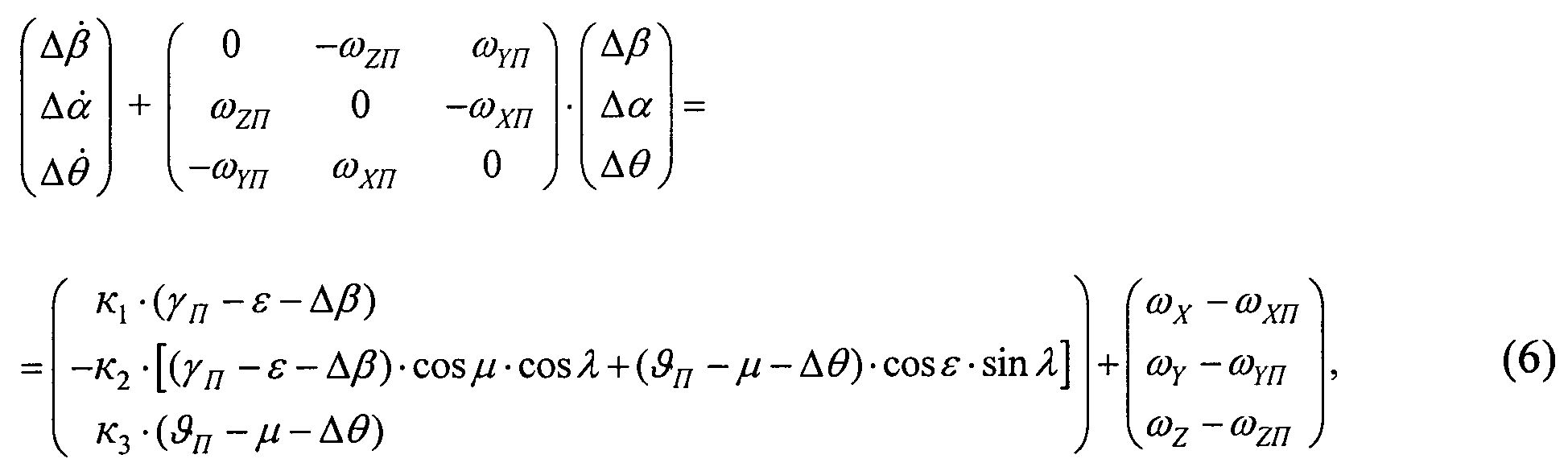
Алгоритм работы нового гирокомпаса для орбитальных КА имеет вид:
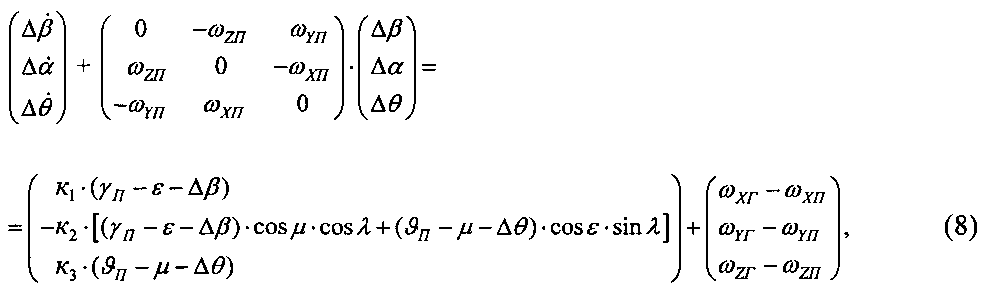


где к1, к2, к3 - параметры коррекции, реализуемые первым, вторым и третьим МПУ.
Алгоритм (8)-(10) может быть записан в форме любых других переменных, в частности в кватернионах.
Ниже приведен пример практической реализации гирокомпаса для орбитального КА.
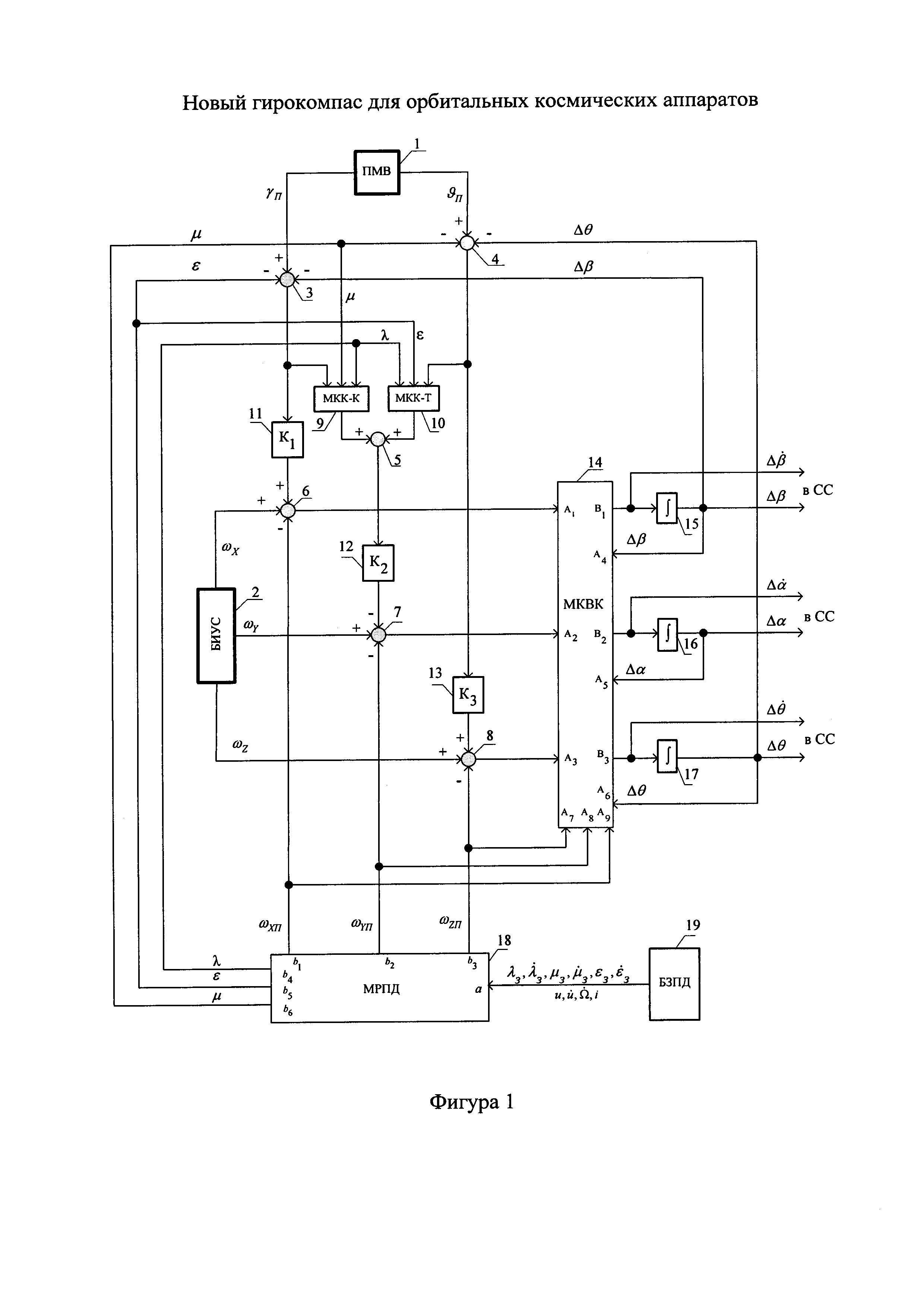
На фигуре 1 обозначено:
1 - ПМВ;
2 - БИУС;
3-8 - сумматоры;
9-10 - модули контроля курсового положения КА относительно ОСК в канале крена и тангажа соответственно;
11-13 - модули преобразования и усиления (МПУ) в каналах крена, курса и тангажа соответственно;
14 - модуль компенсации взаимовлияния каналов ориентации (МКВК);
15-17 - интеграторы;
18 - модуль расчета программных движений (МРПД);
19 - блок задания программных движений (БЗПД);
ωXГ, ωYГ, ωZГ - скорости КА относительно ИСК в проекциях на связанные оси, соответственно по крену, курсу и тангажу, измеряемые БИУС;
,
,
- расчетные значения программных угловых скоростей КА относительно ИСК по связанным осям крена, курса и тангажа КА;
λЗ,  , µЗ,
, µЗ,  , εЗ,
, εЗ,  - задаваемые из БЗП значения программных углов и скоростей КА по курсу, тангажу и крену соответственно относительно ОСК;
- задаваемые из БЗП значения программных углов и скоростей КА по курсу, тангажу и крену соответственно относительно ОСК;
λ,
, µ,
, ε,
- расчетные значения углов и соответствующих им скоростей программных поворотов КА относительно ОСК по курсу, тангажу и крену соответственно;
- скорость прецессии линии узлов (прецессия орбиты) относительно инерциального пространства;
i - угол наклона плоскости орбиты к плоскости экватора Земли;
u - аргумент широты положения КА на орбите;
Δβ,
, Δα,
, Δθ,
- выходные сигналы ОГК по углу и угловой скорости, поступающие в систему стабилизации (СС) КА по крену, курсу и тангажу соответственно;
γП, ϑП - выходные сигналы ПМВ по крену и тангажу соответственно;
к1, к2, к3 - параметры коррекции, реализуемые МПУ в соответствующих каналах крена, курса и тангажа.
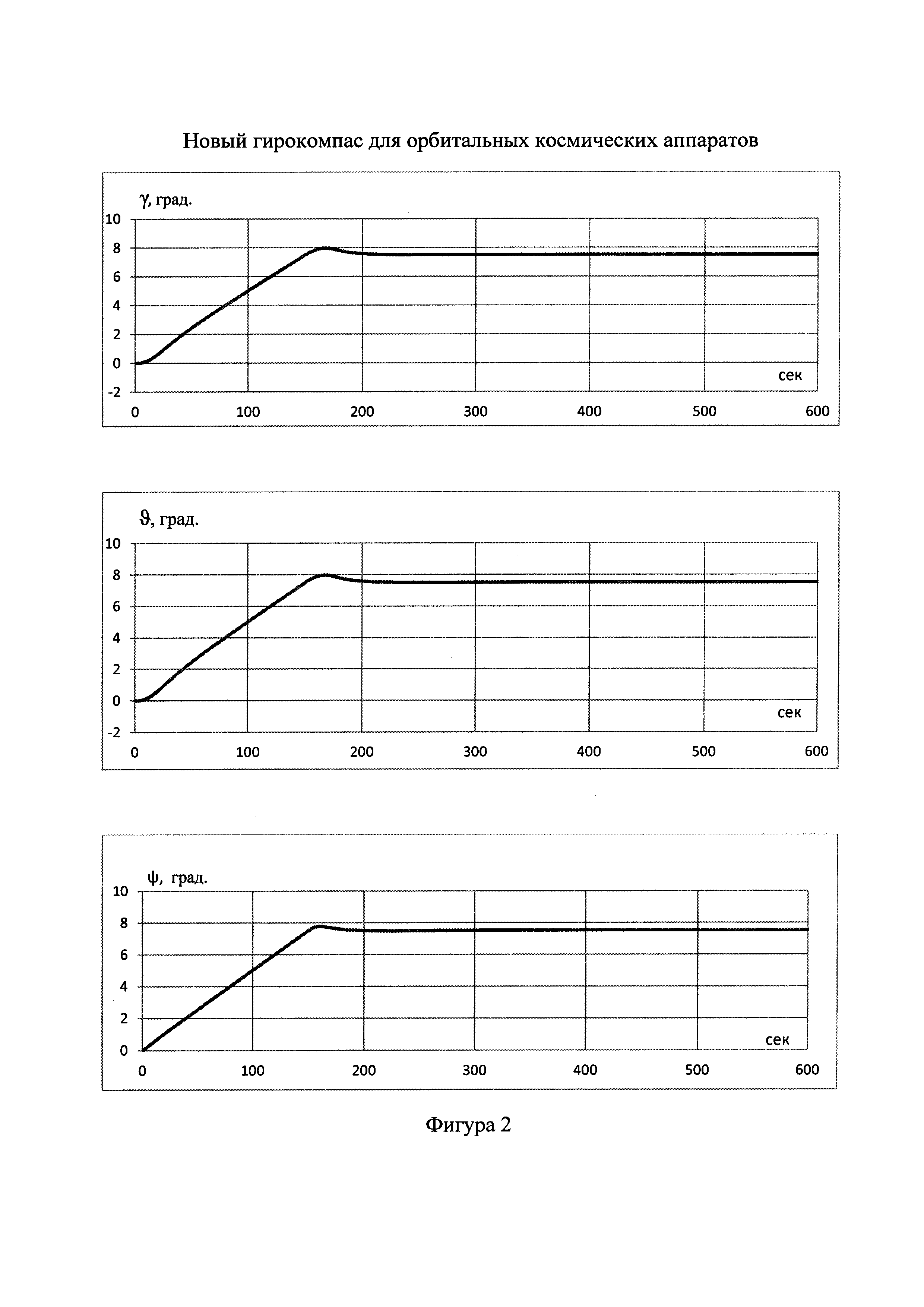
Повернем КА на три равных угла относительно ОСК.
Зададим из БЗПД программные углы λЗ=µЗ=εЗ=+7,5° и одинаковую программную скорость поворотов КА  . Зададим так же из БЗПД орбитальные данные
. Зададим так же из БЗПД орбитальные данные  ,
,  (при этом i выпадает из расчетов).
(при этом i выпадает из расчетов).
Выполним в МРПД расчет программных движений:
- время поворота 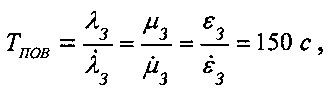
- текущее время программных поворотов t=0-ТПОВ=0-150 с;
- текущие значения программных углов  ,
,  ,
,  .
.
В процессе программных поворотов непрерывно вычисляются программные угловые скорости
,
,
, принимаются показания ПМВ - γП, ϑП и показания БИУС - ωX, ωY, ωZ.
Решение (8)-(10) дает углы и угловые скорости Δβ,
, Δα,
, Δθ,
, которые поступают в систему стабилизации КА.
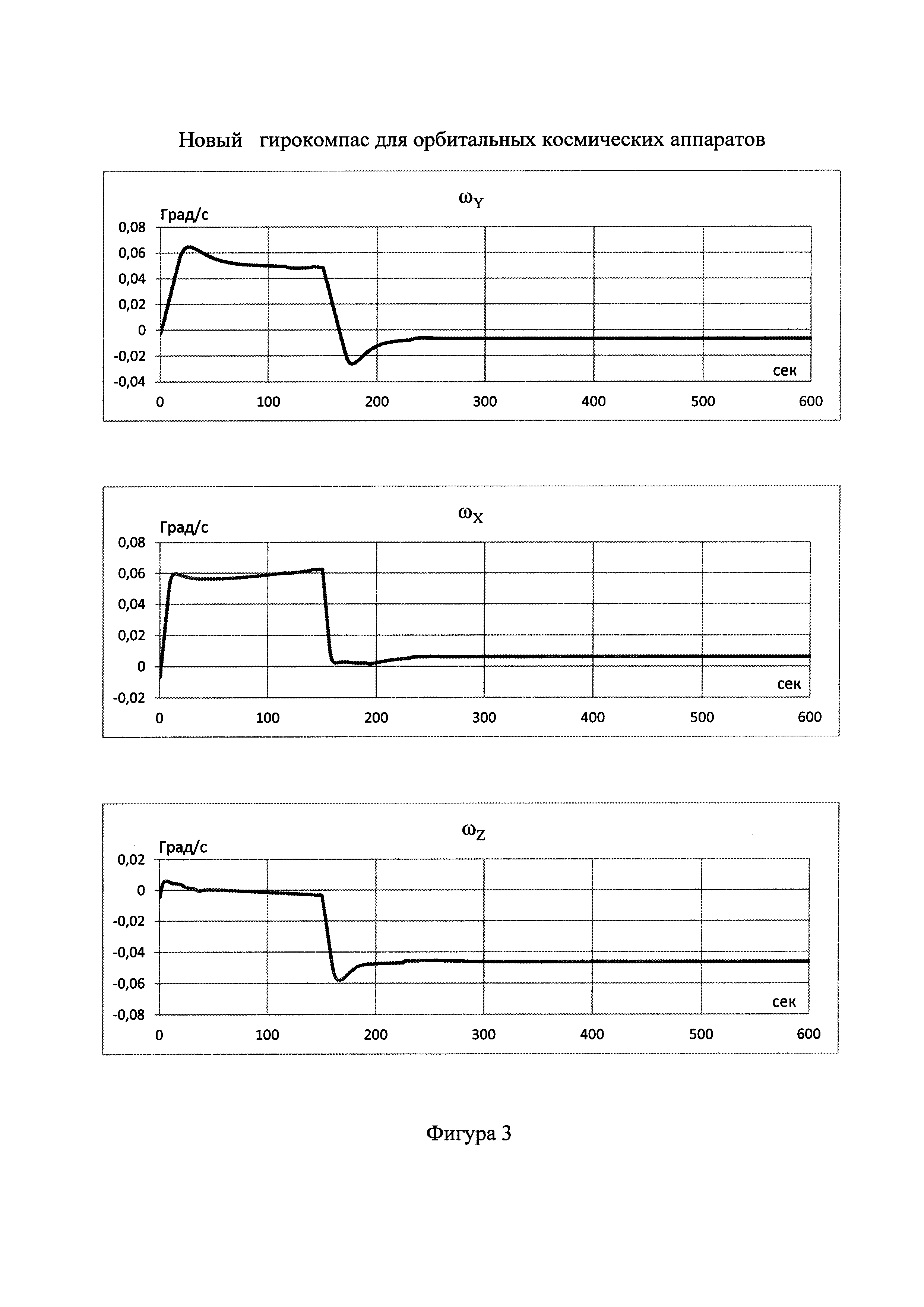
На фигурах 2 и 3 показаны результаты моделирования процесса программного поворота КА. На фигуре 2 показаны углы поворота КА по крену, курсу и тангажу на 7,5°. На фигуре 3 показаны угловые скорости КА в процессе программных поворотов и после их завершения (в процессе моделирования использовалась маховичная стабилизация КА).
Повороты выполнены за расчетное время 150 с. После завершения переходных процессов в контуре стабилизации, гирокомпас удерживает КА на заданных значениях программных углов сколь угодно долго.
Повернем КА на три отличных друг от друга угла.
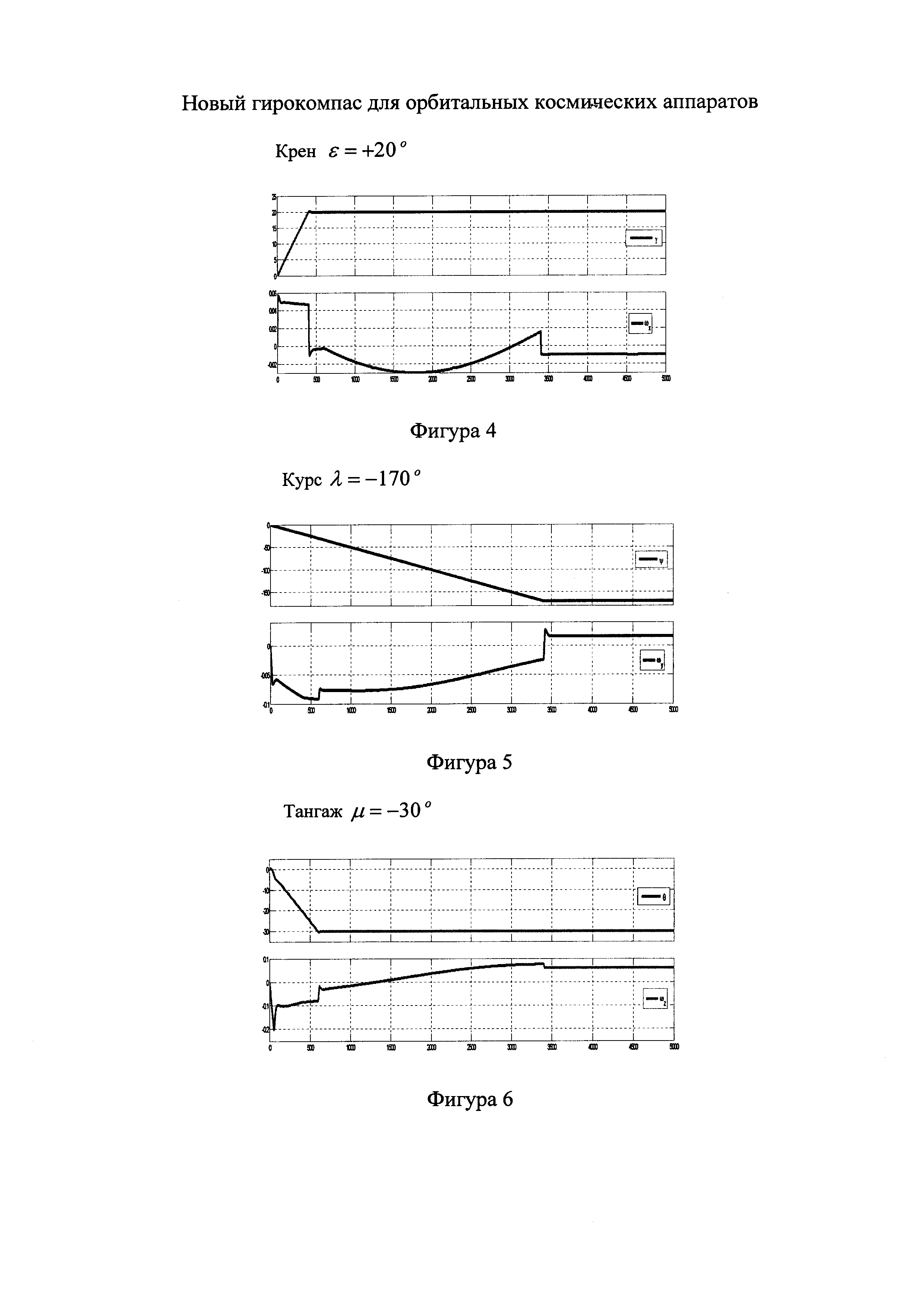
Зададим из БЗПД программные углы поворотов КА: по курсу на λЗ=-170°, по крену на εЗ=+20° и по тангажу на µЗ=-30°. Зададим скорость программных поворотов по каналам  и выполним расчеты в МРПД (аналогично предыдущему повороту).
и выполним расчеты в МРПД (аналогично предыдущему повороту).
На фигурах 4-6 показан результат программных поворотов КА по каналам крена, курса и тангажа соответственно. Космический аппарат, выполнив заданные ему программные повороты, устойчиво удерживает свое положение относительно ОСК.
Предложенный гирокомпас легко трансформируется в известные схемы ОГК:
- для получения структуры ОГК, обеспечивающей программный поворот КА только по курсу, необходимо в алгоритме (8)-(10) положить µ=ε=0 (см. указанный выше патент РФ №2509690);
- для получения «классического» ОГК в форме (2) необходимо в алгоритме (8)-(10) положить λ=µ=ε=0.
Современные ПМВ обладают точностью построения местной вертикали порядка 2-5 угл. мин и линейной зоной точных измерений до 12-15° отклонений КА от местной вертикали. С некоторым ухудшением точности зона линейности выходной характеристики современного ПМВ распространяется до 25-30° отклонений КА от местной вертикали. Это позволяет выполнять программные повороты КА по курсу - на неограниченные углы, а по крену и тангажу - в пределах зон линейности выходных характеристик применяемых ПМВ, сохраняя при этом устойчивость и точность режима гирокомпасирования. В этой связи, полученные свойства нового гирокомпаса становятся конкурентоспособными по отношению к системам ориентации с использование звездных датчиков.
Подтвердим сохранение точности гирокомпасирования. Для наглядности рассчитаем ошибки нового гирокомпаса в повернутом положении КА на угол λ=+90° по курсу относительно ОСК (при этом µ=ε=0) и положим:





где γ, ϑ, ψ,  ,
,  ,
,  - углы и угловые скорости КА относительно ОСК по крену, тангажу и курсу соответственно;
- углы и угловые скорости КА относительно ОСК по крену, тангажу и курсу соответственно;
ωX, ωY, ωZ - проекции абсолютных угловых скоростей КА на связанные оси по крену, курсу и тангажу соответственно;
ΔγП, ΔϑП - детерминированные ошибки ПМВ в каналах крена и тангажа соответственно;
DX, DY, DZ - постоянные (стабильные во времени) составляющие дрейфа гироскопов БИУС в каналах крена, курса и тангажа соответственно.
Будем также считать, что параметры орбитального движения  , i, u компенсированы.
, i, u компенсированы.
После выполнения расчетов для установившегося режима  получим:
получим:



где β(0), α(0), θ(0) - ошибки ОГК после завершения переходных процессов.
Полученные ошибки ОГК для программного положения КА по курсу λ=+90° полностью идентичны ошибкам классического ОГК. Нетрудно показать, что ошибки ориентации ОГК вида (16)-(18) будут сохраняться при любом программном положении КА относительно ОСК, что подтверждает сохранение точности ориентации КА с использование нового гирокомпаса.
Решение вопроса об учете или не учете в алгоритме гирокомпаса параметров орбитального движения
, i, u зависит от требований, предъявляемых к точности ориентации КА, как в режимах коррекции, так и в режимах гиропамяти, и определяется разработчиком системы ориентации.
Таким образом, предлагаемый гирокомпас обладает новыми свойствами по отношению к известному «классическому гирокомпасу». Эти свойства позволяют гирокомпасу сохранять устойчивый режим орбитального гирокомпасирования и точность построения ОСК в процессе программных поворотов КА относительно ОСК по курсу, крену и тангажу.
Гирокомпас для орбитальных космических аппаратов (КА), содержащий в канале крена построитель местной вертикали (ПМВ), выход которого соединен с последовательно включенными первым сумматором, первым модулем усиления и преобразования (МПУ) и вторым сумматором, содержащий в канале курса последовательно соединенные второй МПУ и третий сумматор, содержащий в канале тангажа ПМВ, выход которого соединен с последовательно включенными четвертым сумматором, третьим МПУ и пятым сумматором, кроме того, содержит в каналах крена, курса и тангажа соответственно первый, второй и третий интеграторы, сигналы выходов и входов которых являются входами в систему стабилизации КА соответственно по углам и угловым скоростям соответствующих им каналов стабилизации, причем выход первого интегратора подключен ко второму входу первого сумматора, а выход третьего интегратора подключен ко второму входу четвертого сумматора, а также блок гироскопических измерителей угловых скоростей (БИУС), расположенных по связанным осям КА, выходы которого по каналам крена, курса и тангажа подключены соответственно ко вторым входам второго, третьего и пятого сумматоров, отличающийся тем, что в него введен модуль контроля курса в канале крена (МКК-К), первый вход которого соединен с выходом первого сумматора, и выполняющий функцию: где µ - угол программного поворота КА по тангажу относительно ОСК;λ - угол программного поворота КА по курсу относительно ОСК,и модуль контроля курса в канале тангажа (МКК-Т), первый вход которого соединен с выходом четвертого сумматора, и выполняющий функцию: где ε - угол программного поворота КА по крену относительно ОСК;λ - угол программного поворота КА по курсу относительно ОСК,введены блок задания программных движений (БЗПД) и модуль расчета программных движений (МРПД), вход которого подключен к выходу БЗПД, и выполняющий функцию: где , , - расчетные значения программных угловых скоростей КА относительно ИСК по связанным осям крена, курса и тангажа КА; - расчетные значения углов и соответствующих им скоростей программных поворотов КА относительно ОСК по курсу, тангажу и крену соответственно по заданным значениям из БЗПД; - скорость прецессии линии узлов (прецессия орбиты) относительно инерциального пространства, задаваемой из БЗПД;i - угол наклона плоскости орбиты к плоскости экватора Земли, задаваемого из БЗПД; - аргумент широты положения КА на орбите и орбитальная угловая скорость КА соответственно, задаваемые из БЗПД,а также введен модуль компенсации взаимовлияния каналов ориентации (МКВК) с матричной передаточной функцией: таким образом, что его первый, второй и третий входы подключены к выходам соответственно второго, третьего и пятого сумматоров, его четвертый, пятый и шестой входы подключены к выходам соответственно первого, второго и третьего интеграторов, а его первый, второй и третий выходы подключены к входам соответственно первого, второго и третьего интеграторов, при этом первый, второй и третий выходы МРПД, соответствующие программным скоростям КА в каналах крена, курса и тангажа, подключены соответственно к третьим входам второго, третьего и пятого сумматоров и они же подключены к седьмому, восьмому и девятому входам МКВК, четвертый выход МРПД, соответствующий программному углу курса, подключен одновременно ко вторым входам МКК-К и МКК-Т, пятый выход МРПД, соответствующий программному углу крена, подключен одновременно к третьему входу МКК-Т и третьему входу первого сумматора, шестой выход МРПД, соответствующий программному углу тангажа, подключен к третьему входу МКК-К и третьему входу четвертого сумматора, а выходы МКК-К и МКК-Т подключены соответственно к первому и второму входам вновь введенного шестого сумматора, выход которого соединен с входом второго МПУ, при этом алгоритм работы гирокомпаса для орбитальных КА имеет вид: где к, к, к - параметры коррекции, реализуемые первым, вторым и третьим МПУ.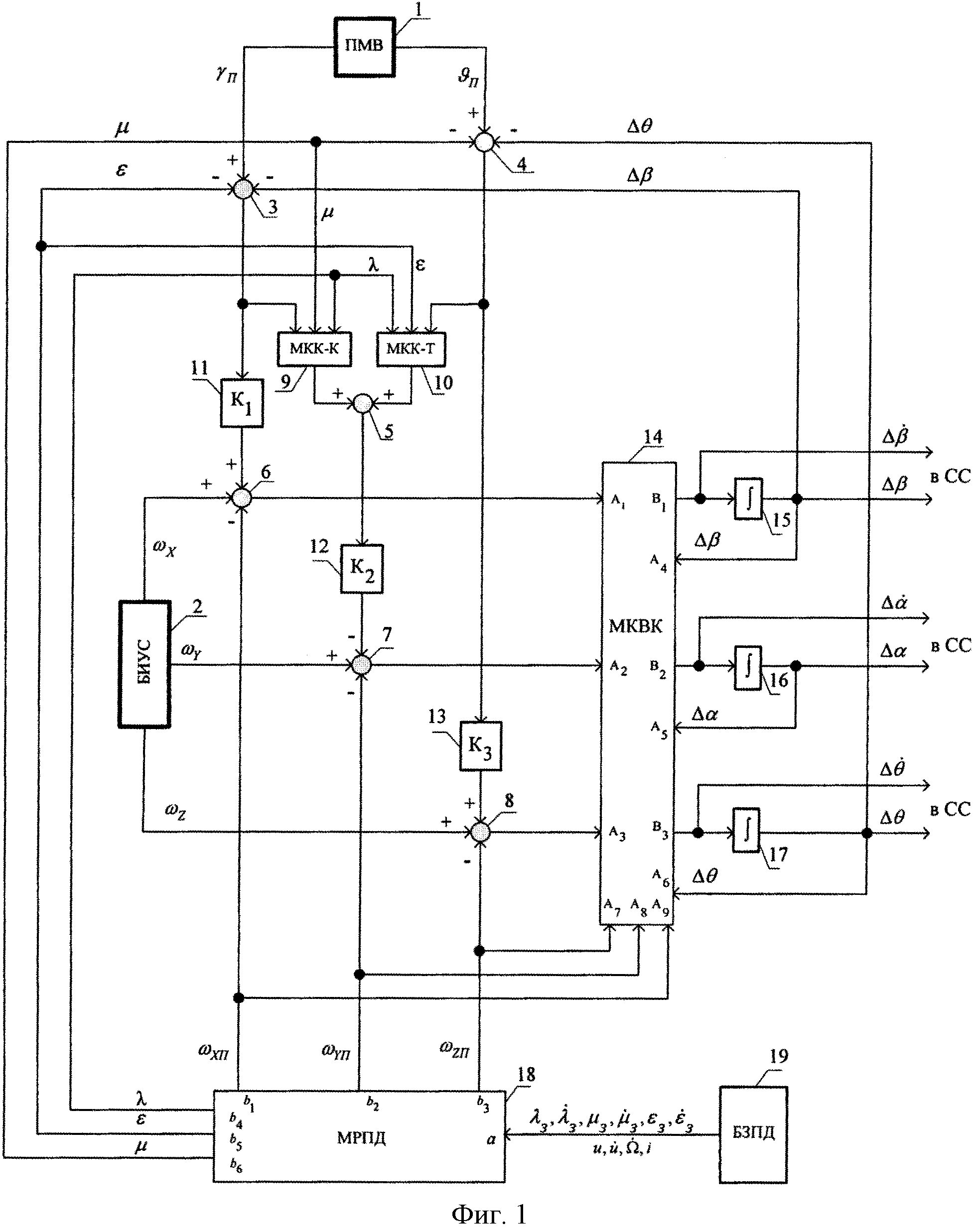








Бесплатформенный орбитальный гирокомпас с произвольной курсовой ориентацией космического аппарата
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Устройство управления положением космического аппарата в пространстве с использованием орбитального гирокомпаса
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Способ коррекции и устройство орбитального гирокомпаса для управления угловым движением космического аппарата
Способ компенсации ошибок орбитального гирокомпаса
Система управления пространственной ориентацией космического аппарата с использованием бесплатформенного орбитального гирокомпаса
Способ восстановления ориентации орбитального космического аппарата
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными
Бесплатформенный орбитальный гирокомпас с произвольной курсовой ориентацией космического аппарата
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Устройство управления положением космического аппарата в пространстве с использованием орбитального гирокомпаса
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Способ коррекции и устройство орбитального гирокомпаса для управления угловым движением космического аппарата
Способ компенсации ошибок орбитального гирокомпаса
Система управления пространственной ориентацией космического аппарата с использованием бесплатформенного орбитального гирокомпаса
Способ восстановления ориентации орбитального космического аппарата
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными
Способ восстановления курсовой ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса

