Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к системам управления полетом летательных аппаратов. Поставленная задача достигается за счет того, что в летательном аппарате используется система взлета - посадки и система управления движением, основанная на использовании гидромеханических узлов управляемых электрическим приводом
Ближайший аналог мне не известен.
В своем изобретении я предлагаю принципиально новый подход к системе управления полетом летательного аппарата, который будет взлетать и садиться вертикально, перемещаться вправо-влево, двигаться вперед- назад, останавливаться в воздухе. Все винты будут расположены в диффузорах, что увеличит их коэффициент полезного действия. На летательных аппаратах будет установлено два винта с правым и два винта с левым вращением. Винты с одинаковым вращением будут установлены по диагонали, такое расположение винтов предотвратит вращение летательного аппарата вокруг своей оси.
Источником крутящего момента является двигатель внутреннего сгорания, уникальность системы управления в том, что она обеспечивает передачу крутящего момента от двигателя к воздушным винтам через гидравлику.
Система управления полетом летательного аппарата состоит из:
1. Системы управления взлетом и посадкой.
2. Системы управления движения влево-вправо, вперед-назад, остановки и парковочного хода.
3. Системы безопасности летательного аппарата.
Все системы работают как одно целое, узлы и агрегаты используются в сразу в нескольких системах. Перед запуском систем управления летательного аппарата необходимо отключить блок управления полетом. В противном случае система безопасности не даст запустить системы летательного аппарата. Система безопасности, в случае безопасного запуска системы управления летательного аппарата, сама будет включать блок управления полетом. В случае невозможности запуска, система укажет причину неисправности на мониторе бортового компьютера. Для поддержания давления в системе гидравлики на одном уровне, при переключении в разные режимы, в системе будет установлен блок перепускных клапанов обеспечивающих стабильную нагрузку на источник крутящего момента. Принцип подачи рабочей жидкости в системе гидравлики во всех системах управления полетом одинаковая, и детально расписана в описании работы системы управления взлетом и посадкой.
1. Система управления взлетом и посадкой состоит из:
1. Электромеханического гидро распределителя управляющего переключением передач подъемных гидромеханических коробок передач.
2. Перепускных клапанов системы гидравлики.
3. Блока управления электромеханическим гидрораспределителем переключения передач подъемных ГМКП.
4. Блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов.
5. Блока регулируемых перепускных клапанов управляющих работой гидромоторов.
6. Блока управления полетом.
7. Блока стабилизации давления в системе гидравлики.
8. Датчиков контроля давления в системе гидравлики.
9. Перепускного клапана электромеханического гидрораспределителя управляющего переключением передач ГМКП.
Система управления взлетом и посадкой работает следующим образом.
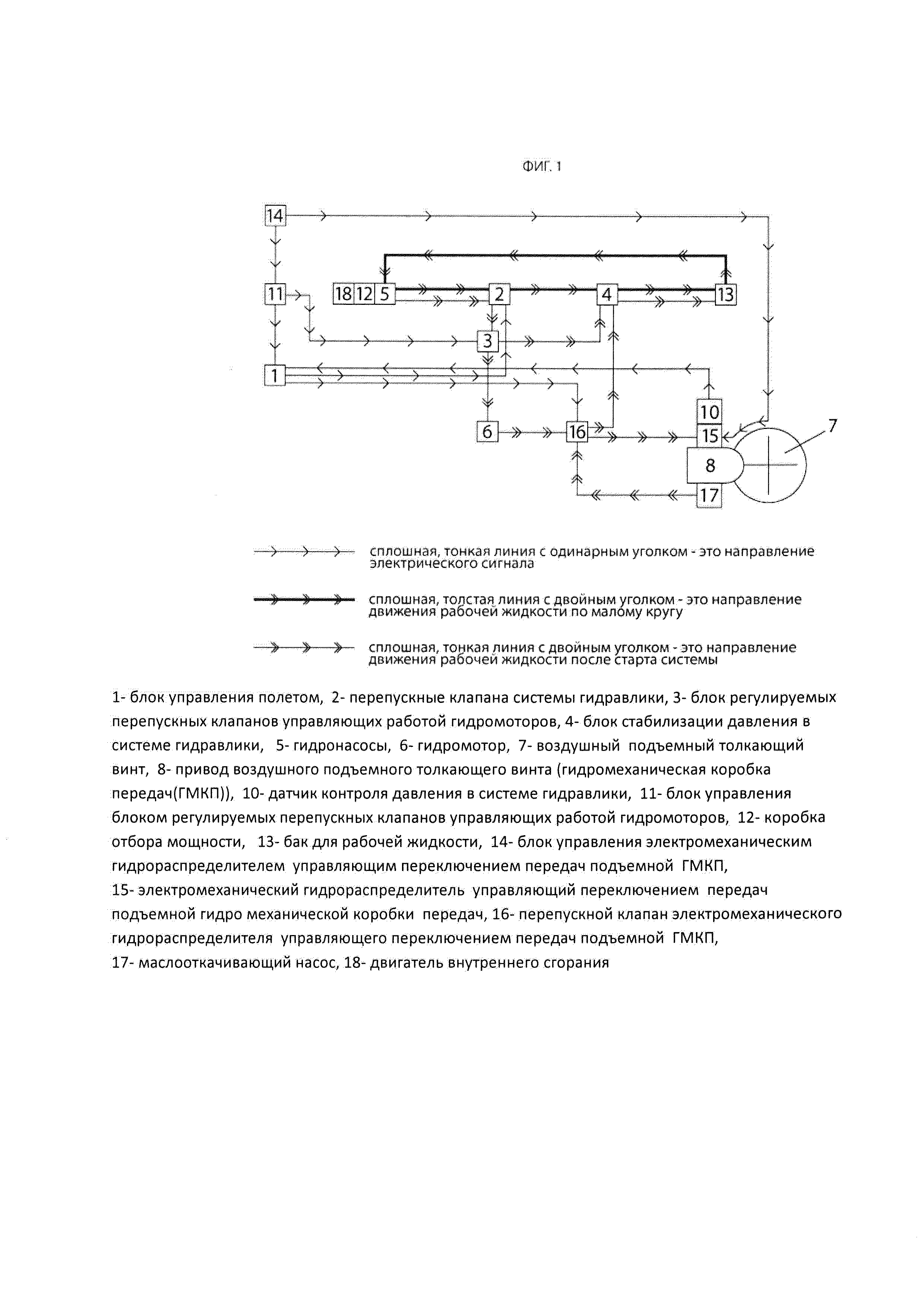
Рассмотрим работу системы управления гидравликой взлета и посадки на примере привода одного воздушного винта где для привода воздушных винтов используется гидро механическая коробка передач (ГМКП). Контроль давления в системе гидравлики производится датчиками контроля давления в системе гидравлики. Первый установлен перед гидромотором (фиг.1 поз.6), второй - на блоке стабилизации давления в системе гидравлики (фиг.1 поз.4) на канале возврата рабочей жидкости гидросистемы в бак, третий- на электромеханическом гидрораспределителе управляющем переключением передач ГМКП (фиг.1 поз.15). Система гидравлики работает следующим образом.
Источником крутящего момента в летательном аппарате служит двигатель внутреннего сгорания (фиг.1 поз.18). К нему прикреплена коробка отбора мощности (фиг.1 поз.12), которая снимает обороты с двигателя и передает крутящий момент на агрегаты.
Запуская коробку отбора мощности (фиг.1 поз.12), мы запускаем привод гидронасосов (фиг.1 поз 5). Гидронасос забирает рабочую жидкость из бака для рабочей жидкости (фиг.1 поз.13) и подает на перепускные клапана системы гидравлики (фиг.1 поз.2), расположенные на блоке стабилизации давления в системе гидравлики (фиг.1 поз.4). До включения блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11), перепускные клапана системы гидравлики (фиг.1 поз.2) находятся во включенном положении. Рабочая жидкость идет по малому кругу, с гидронасоса (фиг.1 поз.5) через перепускные клапана (фиг.1 поз.2) и блок стабилизации давления в системе гидравлики (фиг.1 поз.4) возвращается в бак для рабочей жидкости (фиг.1 поз.13).
После включения выбранной передачи на блоке управления электромеханическим гидрораспределителем переключения передач подъемной ГМКП (фиг.1 поз.14), включается клапан выбранной передачи на электромеханическом гидрораспределителе переключения передач подъемной ГМКП (фиг.1 поз.15). Включая передачу на блоке управления электромеханическим гидрораспределителем переключения передач подъемной ГМКП (фиг.1 поз.14), мы подаем сигнал на блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11), который включает блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) в предвзлетное положение. Одновременно подается электрический сигнал с блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11) на блок управления полетом (фиг.1 поз.1). Блок управления полетом (фиг.1 поз.1) автоматически подает команду на выключение перепускных клапанов системы гидравлики (фиг.1 поз.2). Одновременно блок управления полетом (фиг.1 поз.1) включает перепускной клапан электромеханического гидрораспределителя управляющего переключением передач ГМКП (фиг.1 поз.16). Рабочая жидкость через перепускные клапана системы гидравлики (фиг.1 поз.2) направляется на блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3). С блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) рабочая жидкость по каналам высокого давления направляется в гидромотор (фиг.1 поз.6). С гидромотора (фиг.1 поз.6) жидкость направляется через перепускной клапан электромеханического гидрораспределителя управляющего переключением передач (фиг.1 поз.16) в электромеханический гидрораспеделитель управляющий переключением передач подъемных ГМКП (фиг.1 поз.15). С электромеханического гидрораспеделителя управляющего переключением передач подъемных ГМКП (фиг.1 поз.15), рабочая жидкость поступает через выбранную передачу ГМКП в картер ГМКП (фиг.1 поз.8). ГМКП (фир.1 поз.8) начинает вращаться, вращая воздушный подъемный толкающий винт (фиг.1 поз.7) в предвзлетном режиме. Масло откачивающий насос (фиг.1 поз.17) откачивает жидкость с картера ГМКП (фиг.1 поз.8) и направляет ее на перепускной клапан электромеханического гидрораспеделителя управляющего переключением передач ГМКП (фиг.1 поз.16). С перепускного клапана электромеханического гидрораспеделителя управляющего переключением передач ГМКП (фиг.1 поз.16) рабочая жидкость направляется на блок стабилизации давления в системе гидравлики (фиг.1 поз.4), а с него в бак для рабочей жидкости (фиг.1 поз.13). Рабочая жидкость, не используемая для работы гидромотора (фиг.1 поз.6) на разных этапах взлета и посадки, возвращается с блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) через блок стабилизации давления в системе гидравлики (фиг.1 поз.4) в бак для рабочей жидкости (фиг.1 поз.13).
После переключения блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11) во взлетное положение, блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) переключается во взлетный режим. Увеличивается подача рабочей жидкости на гидромотор (фиг.1 поз.6) и давление в системе, в результате увеличиваются обороты гидромотора (фиг.1 поз.6), обороты ГМКП (фиг.1 поз.8) и скорость вращения воздушного подъемного толкающего винта (фиг.1 поз.7). Летательный аппарат подымается в небо.
После увеличения давления в электромеханическом гидрораспределителе управляющем переключением передач ГМКП (фиг.1 поз.15),до необходимого параметра, датчик контроля давления в системе гидравлики (фмг.1 поз.10) установленный на электромеханическом гидрораспределителе управляющем переключением передач подъемных ГМКП (фиг.1 поз.15) подаст сигнал на блок управления полетом (фиг.1 поз.1). Блок управления полетом (фиг.1 поз.1) выключит перепускной клапан электромеханического гидрораспеделителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.16), в результате рабочая жидкость с масло откачивающего насоса (фиг.1 поз.17) идет по малому кругу: через перепускной клапан электромеханического гидрораспределителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.16) на электромеханический гидрораспеделитель управляющий переключением передач подъемной ГМКП (фиг.1 поз.15), с электромеханического гидрораспределителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.15) в корпус выбранной передачи и сливается в картер ГМКП (фиг.1 поз.8). В этом случае рабочая жидкость с гидромотора (фиг.1 поз.6) идет через перепускной клапан электромеханического гидрораспределителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.16) на блок стабилизации давления в системе гидравлики (фиг.1 поз.4) и сливается в бак для рабочей жидкости (фиг.1 поз.13). В случае уменьшения давления рабочей жидкости в малом круге, датчик контроля давления в системе гидравлики (фиг.1 поз.10) установленный на электромеханическом гидрораспределителе управляющем переключением передач ГМКП (фиг.1 поз.15), подает сигнал на блок управления полетом (фиг.1 поз1). Блок управления полетом (фиг.1 поз.1) включает перепускной клапан электромеханического гидрораспределителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.16), в результате рабочая жидкость идет по большому кругу. После восстановления давления в электромеханическом гидрораспределителе управляющем переключением передач подъемной ГМКП (фиг.1 поз.15), датчик контроля давления в системе гидравлики (фиг.1 поз.10) установленный на электромеханическом гидрораспределителе управляющем переключением передач подъемной ГМКП (фиг.1 поз.15), подает сигнал на блок управления полетом (фиг.1 поз1), блок управления полетом (фиг.1 поз.1) выключает перепускной клапан электромеханического гидрораспределителя, управляющего переключением передач подъемной ГМКП (фиг.1 поз.16). В результате рабочая жидкость идет по малому кругу. После переключения блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11), обратно в предвзлетное положение, с блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11), поступит сигнал на блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) и блок управления полетом (фиг.1 поз.1). В результате блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) переключится в предвзлетный режим, а блок управления полетом (фиг.1 поз.1) автоматически подает команду на включение перепускного клапана электромеханического гидрораспеделителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.16). В результате рабочая жидкость идет по большому кругу, а система взлета и посадки работает в предвзлетном режиме.
Для полной остановки воздушных винтов необходимо выключить передачу на блоке управления электромеханическим гидрораспределителем переключения передач подъемных ГМКП (фиг.1 поз.14), т.е. переключить в нейтральное положение.
После перевода в нейтральное положение блока управления электромеханическим гидрораспределителем переключения передач подъемных ГМКП (фиг.1 поз.14), выключается клапан выбранной передачи на электромеханическом гидрораспределителе переключения передач подъемных ГМКП (фиг.1 поз.15). Одновременно после выключения передачи на блоке управления электромеханическим гидрораспределителем переключения передач подъемных ГМКП (фиг.1 поз.14), прекращается подача сигнала на блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11). После выключения блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.11), прекращается подача сигнала на блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) и блок управления полетом (фиг.1 поз.1). В результате блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.1 поз.3) переключается в нерабочее положение, а блок управления полетом (фиг.1 поз.1) автоматически подает команду на включение перепускных клапанов системы гидравлики (фиг.1 поз.2). Рабочая жидкость с перепускных клапанов системы гидравлики (фиг.1 поз.2) направляется на блок стабилизации давления в системе гидравлики (фиг.1 поз.4), а с него в бак для рабочей жидкости (фиг.1 поз.13). Одновременно блок управления полетом (фиг.1 поз.1) подает команду на выключение перепускного клапана электромеханического гидрораспределителя управляющего переключением передач подъемной ГМКП (фиг.1 поз.16), в результате рабочая жидкость в подъемной ГМКП (фиг.1 поз.8) идет по малому кругу.
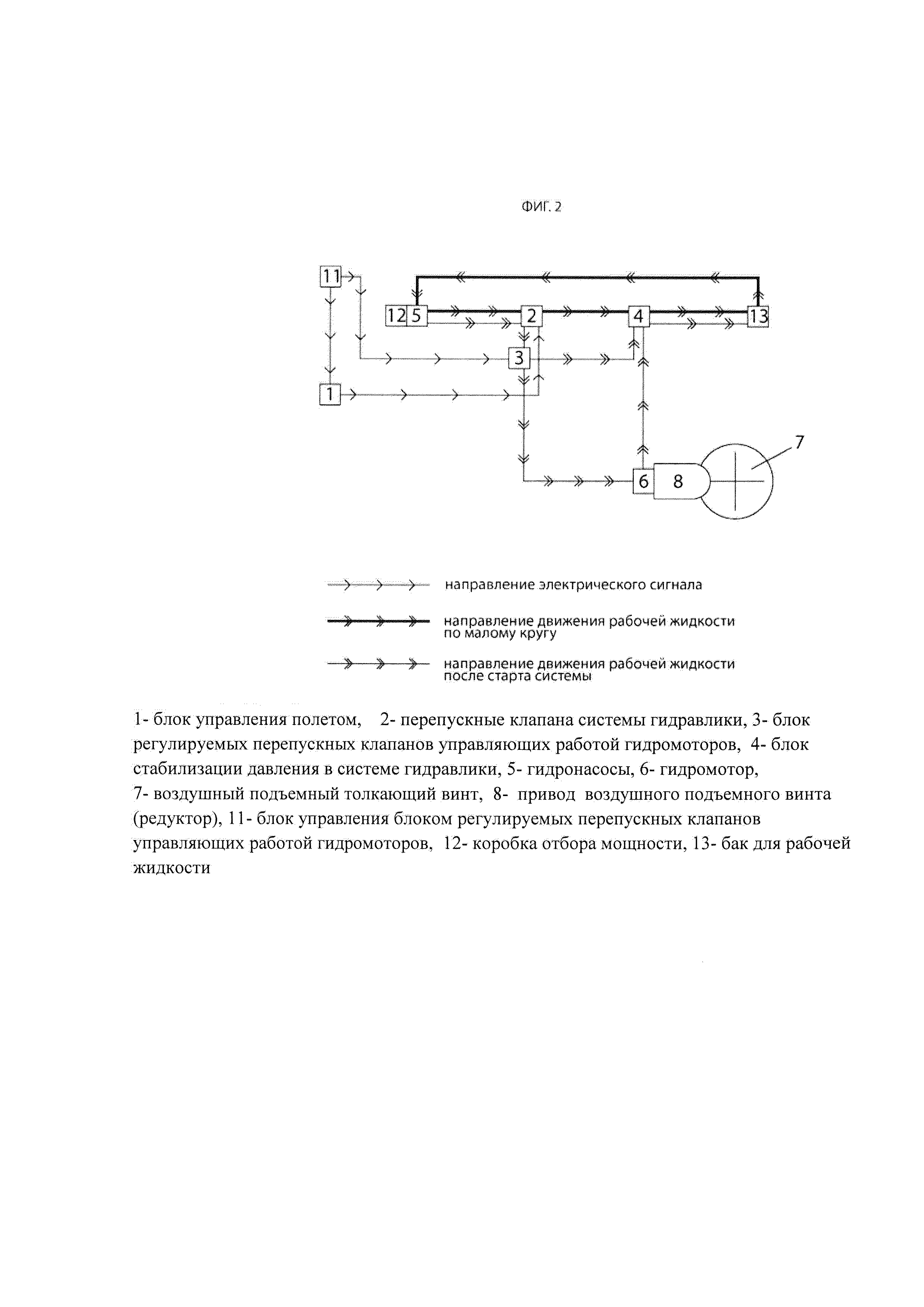
На моделях где для привода воздушных подъемных толкающих винтов используется редуктор, система управления взлетом и посадкой работает следующим образом. Рассмотрим на примере одного воздушного винта.
Запуская коробку отбора мощности (фиг.2 поз.12), мы запускаем привод гидронасосов. Гидронасос (фиг.1 поз.5) забирает рабочую жидкость с бака для рабочей жидкости (фиг.2 поз.13) и подает на перепускные клапана системы гидравлики (фиг.2 поз.2), расположенные на блоке стабилизации давления в системе гидравлики (фиг.2 поз.4). До включения блока управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.11) перепускные клапана системы гидравлики (фиг.2 поз.2)находятся в включенном положении. Рабочая жидкость с гидронасоса (фиг.2 поз.5) через перепускные клапана системы гидравлики (фиг.2 поз.2) и блок стабилизации давления в системе гидравлики (фиг.2 поз.4) возвращается в бак для рабочей жидкости (фиг.2 поз.13). Включая блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.11) в предвзлетное положение, мы переключаем блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.3), в предвзлетное положение. Одновременно блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.11) подает команду на блок управления полетом (фиг.2 поз.1) который автоматически подает команду на выключение перепускных клапанов системы гидравлики (фиг.2 поз.2). Рабочая жидкость с гидронасосов (фиг.2 поз.5) через перепускные клапана системы гидравлики (фиг.2 поз.2) направляется на блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.3). С блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.3) рабочая жидкость по каналам высокого давления направляется в гидромотор (фиг.2 поз.6). Гидромотор (фиг.2 поз.6) начинает вращаться и вращает привод воздушного подъемного толкающего винта (редуктор) (фиг.2 поз.8), который вращает установленный на нем воздушный подъемный толкающий винт (фиг.2 поз.7) в предвзлетном режиме. С гидромотора (фиг.2 поз.6) рабочая жидкость направляется на блок стабилизации давления в системе гидравлики (фиг.2 поз.4), а с него в бак для рабочей жидкости (фи г. 2 поз.13).
Рабочая жидкость, не используемая для работы гидромоторов (фиг.2 поз.6) на разных этапах взлета и посадки, возвращается с блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.3) через блок стабилизации давления в системе гидравлики (фиг.2 поз.4) в бак для рабочей жидкости (фиг.2 поз.13).
Переключая блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.11) во взлетное положение, мы переключаем блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.3) во взлетный режим. Увеличивается подача рабочей жидкости на гидромотор (фиг.2 поз.6), в результате увеличиваются обороты гидромотора (фиг.2 поз.6) и обороты привода воздушного подъемного толкающего винта (редуктора) (фиг.2 поз.8). Привод воздушного подъемного толкающего винта (редуктор) (фиг.2 поз.8) начинает вращать воздушный подъемный толкающий винт (фиг.2 поз.7) во взлетном режиме. При дальнейшем увеличении подачи рабочей жидкости летательный аппарат подымается в небо.
После приземления, переключая блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.11) в предвзлетное положение, мы переключаем блок регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.3) обратно в предвзлетное положение. В результате уменьшается подача рабочей жидкости на гидромотор (фиг.2 поз.6), а следовательно обороты привода воздушного подъемного толкающего винта (редуктора) (фиг.2 поз.8) и обороты самого воздушного подъемного толкающего винта (фиг.2 поз.7). Выключая блок управления блоком регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.2 поз.11), мы подаем команду на блок управления полетом (фиг.2 поз.1), который автоматически подает команду на включение перепускных клапанов системы гидравлики (фиг.2 поз.2). В результате рабочая жидкость с гидронасосов (фир.2 поз.5) через перепускные клапана системы гидравлики (фиг.2 поз.2) направляется на блок стабилизации давления в системе гидравлики (фиг.2 поз.4), а с него в бак для рабочей жидкости (фиг.2 поз13). Воздушный подъемный толкающий винт (фиг.2 поз.7) перестает вращаться.
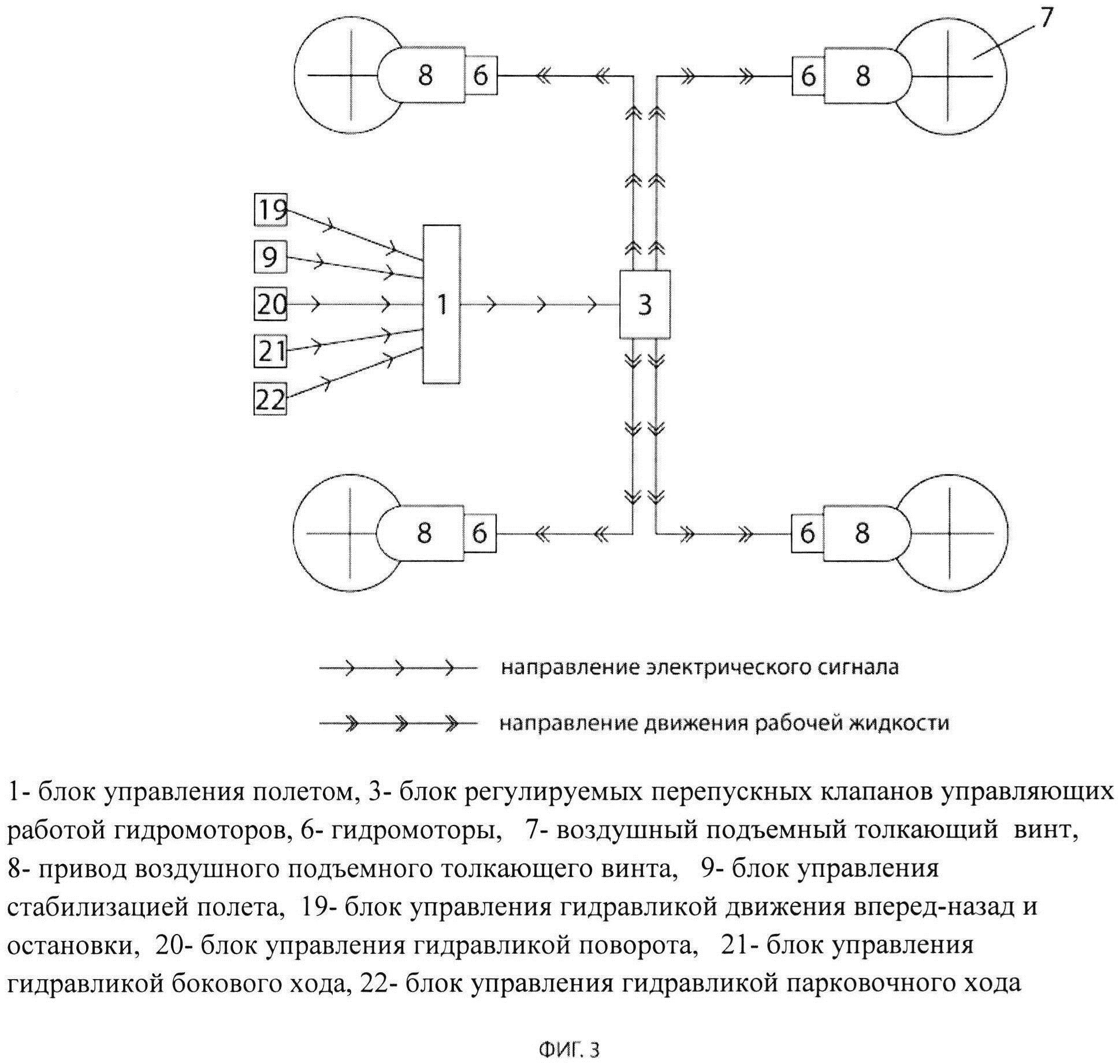
2. Системы управления движения вперед-назад, остановки, влево-вправо, и парковочного хода состоит из:
1. Блока управления полетом.
2. Блока регулируемых перепускных клапанов управляющих работой гидромоторов.
3. Блока управления гидравликой движения вперед-назад и остановки.
4. Блока управления гидравликой поворота.
5. Блока управления гидравликой бокового движения.
6. Блока управления гидравликой парковочного хода.
7. Блока управляющего стабилизацией полета.
Системы управления движения влево-вправо, вперед-назад, остановки, и парковочного хода работает следующим образом.
После взлета, для движения летательного аппарата вперед необходимо переключить блок управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) в положение вперед. В этом случае с блока управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) задних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) задних воздушных подъемных толкающих винтов (фиг.3 поз.7). При увеличении количества рабочей жидкости проходящей через гидромоторы (фиг.3 поз.6) увеличиваются обороты гидромоторов (фиг.3 поз.6), а следовательно привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих задних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате летательный аппарат начинает движение вперед.
После взлета, для движения летательного аппарата назад необходимо переключить блок управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) в положение назад. В этом случае с блока управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) передних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) передних воздушных подъемных толкающих винтов (фиг.3 поз.7). При увеличении количества рабочей жидкости проходящей через гидромоторы (фиг.3 поз.6) увеличиваются обороты гидромоторов (фиг.3 поз.6), а следовательно привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих передних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате летательный аппарат начинает движение назад.
Для остановки летательного аппарата в механическом режиме во время движения вперед необходимо переключить блок управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) в положение назад. В этом случае с блока управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) передних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) передних воздушных подъемных толкающих винтов (фиг.3 поз.7). При увеличении количества рабочей жидкости проходящей через эти гидромоторы (фиг.3 поз.6) увеличатся их обороты, а следовательно увеличатся обороты привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих передних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате летательный аппарат начнет останавливаться.
Для остановки летательного аппарата в механическом режиме во время движения назад необходимо переключить блок управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) в положение вперед. В этом случае с блока управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) задних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) задних воздушных подъемных толкающих винтов (фиг.3 поз.7). При увеличении количества рабочей жидкости проходящей через эти гидромоторы (фиг.3 поз.6) увеличатся их обороты, а следовательно увеличатся обороты привода задних воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих задних воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате летательный аппарат начнет останавливаться.
Для остановки летательного аппарата в автоматическом режиме во время движения вперед или назад необходимо переключить блок управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) в нейтральное положение. В этом случае блок управления полетом (фиг.3 поз.1) будет выполнять команды поступающие с блока управления стабилизацией полета (фиг.3 поз.9), при выключенном блоке управления гидравликой движения вперед-назад и остановки (фиг.3 поз.19) блок управления стабилизацией полета (фиг.3 поз.9) будет автоматически выравнивать летательный аппарат относительно горизонта на все четыре стороны. Это возможно только в случае зависания летательного аппарата на месте, причем в автоматическом режиме блок управления стабилизацией полета (фиг.3 поз.9) будет не просто останавливать летательный аппарат, а и компенсировать крен связанный с воздушными потоками вокруг летательного аппарата. Обороты будут добавляться на те воздушные подъемные толкающие винты (фиг.3 поз.7) которые будут находиться ниже оси горизонта, так будет происходить пока летательный аппарат не остановиться и не выровняется относительно горизонта. Более детально работа блока управляющего стабилизацией полета описана в разделе - система безопасности. Сам процесс остановки происходит по принципу ручной остановки, то есть за счет изменения скорости вращения необходимых воздушных подъемных толкающих винтов (фиг.3 поз.7), как это описано выше.
После взлета, во время движения для поворота летательного аппарата вправо необходимо повернуть ось блока управления гидравликой поворота (фиг.3 поз.20) вправо. В этом случае с блока управления гидравликой поворота (фиг.3 поз.20) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) переднего левого и заднего правого воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) переднего левого и заднего правого воздушных подъемных толкающих винтов (фиг.3 поз.7). При увеличении количества рабочей жидкости проходящей через гидромоторы (фиг.3 поз.6) увеличиваются обороты этих гидромоторов (фиг.3 поз.6), а следовательно привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих переднего левого и заднего правого воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате летательный аппарат начинает движение вправо.
После взлета, во время движения, для поворота летательного аппарата влево необходимо повернуть ось блока управления гидравликой поворота (фиг.3 поз.20) влево. В этом случае с блока управления гидравликой поворота (фиг.3 поз.20) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) переднего правого и заднего левого воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) переднего правого и заднего левого воздушных подъемных толкающих винтов (фиг.3 поз.7). При увеличении количества рабочей жидкости проходящей через гидромоторы (фиг.3 поз.6) увеличиваются обороты этих гидромоторов (фиг.3 поз.6), а следовательно привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих переднего правого и заднего левого воздушных подъемных толкающих винтов (фиг.3 поз.7). В результате летательный аппарат начинает движение влево.
Поворачивать летательный аппарат можно как во время движения вперед так и во время движения назад. Принцип и порядок работы системы гидравлики поворота во время движения назад такой же, как при поворотах во время движения вперед.
После взлета, для бокового движения летательного аппарата вправо необходимо переключить блок управления гидравликой бокового хода (фиг.3 поз.21) вправо. В этом случае с блока управления гидравликой бокового хода (фиг.3 поз.21) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) воздушных подъемных толкающих винтов (фиг.3 поз.7) расположенных по левому борту. В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) воздушных подъемных толкающих винтов (фиг.3 поз.7) расположенных по левому борту. При увеличении количества рабочей жидкости проходящей через эти гидромоторы (фиг.3 поз.6) увеличатся их обороты, а следовательно и обороты привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих воздушных подъемных толкающих винтов (фиг.3 поз.7) расположенных по левому борту. В результате летательный аппарат начинает боковое движение вправо.
После взлета, для бокового движения летательного аппарата влево необходимо переключить блок управления гидравликой бокового хода (фиг.3 поз.21) влево. В этом случае с блока управления гидравликой бокового хода (фиг.3 поз.21) поступит сигнал на блок управления полетом (фиг.3 поз.1). Блок управления полетом (фиг.3 поз.1), подаст сигнал на регулируемые перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за работу гидромоторов (фиг.3 поз.6) расположенных на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) воздушных подъемных толкающих винтов (фиг.3 поз.7) расположенных по правому борту. В результате увеличится подача рабочей жидкости системы гидравлики на гидромоторы (фиг.3 поз.6) расположенные на приводе воздушных подъемных толкающих винтов (фиг.3 поз.8) воздушных подъемных толкающих винтов (фиг.3 поз.7) расположенных по правому борту. При увеличении количества рабочей жидкости проходящей через эти гидромоторы (фиг.3 поз.6) увеличатся их обороты, а следовательно и обороты привода воздушных подъемных толкающих винтов (фиг.3. поз.8) и самих воздушных подъемных толкающих винтов (фиг.3 поз.7) расположенных по правому борту. В результате летательный аппарат начинает боковое движение влево. Для прекращения бокового движения необходимо переключить блок управления гидравликой бокового хода (фиг.3 поз.21) в сторону противоположную от бокового движения. Система автоматически изменит обороты воздушных винтов, в результате летательный аппарат остановится.
Под движением парковочным ходом подразумевается движение во всех направлениях на предельно малой скорости или скорости близкой к нулю. Этот результат достигается за счет использования блока управления гидравликой парковочного хода (фиг.3 поз.22). Задача этого блока обеспечить минимальную подачу дополнительной рабочей жидкости на гидромоторы (фиг.3 поз.6) привода воздушных подъемных толкающих винтов (фиг.3 поз.8) при движении летательного аппарата в любую сторону. Благодаря этому мы получим изменение скорости вращения подъемных толкающих винтов равное нескольким оборотам, что позволит летательному аппарату перемещаться в выбранном направлении со скоростью близкой к нулю.
То есть совместная работа блока управления гидравликой парковочного хода (фиг.3 поз.22), блока управления полетом (фиг.3 поз,1) и блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3) спроектирована так, что после включения блока управления гидравликой парковочного хода (фиг.3 роз.22) перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.3 поз.3), которые отвечают за дополнительную подачу рабочей жидкости на гидромоторы (фиг.3 поз.6), переключатся в положение минимальной дополнительной подачи рабочей жидкости. В результате мы получим минимальную разницу в между оборотами воздушных подъемных толкающих винтов (фиг.3 поз.7) при движении в любую сторону, а значит и минимальное изменение в разнице потока воздуха. В результате движение в выбранном направлении будет происходить с минимальной скоростью. Порядок изменения направления движения такой же как при движении вперед-назад, влево-вправо и при боковом движении влево-вправо.
3. Система безопасности состоит из:
1. Блока управления полетом.
2. Перепускных клапанов системы гидравлики.
3. Датчиков контроля давления в системе гидравлики.
4. Датчика высоты.
5. Датчика горизонта.
6. Блока управляющего стабилизацией полета.
7. Блока переключения винтов в режим авторотации.
8. Блока регулируемых перепускных клапанов управления работой гидромоторов.
9. Блока стабилизации давления в системе гидравлики.
Система безопасности работает следующим образом.
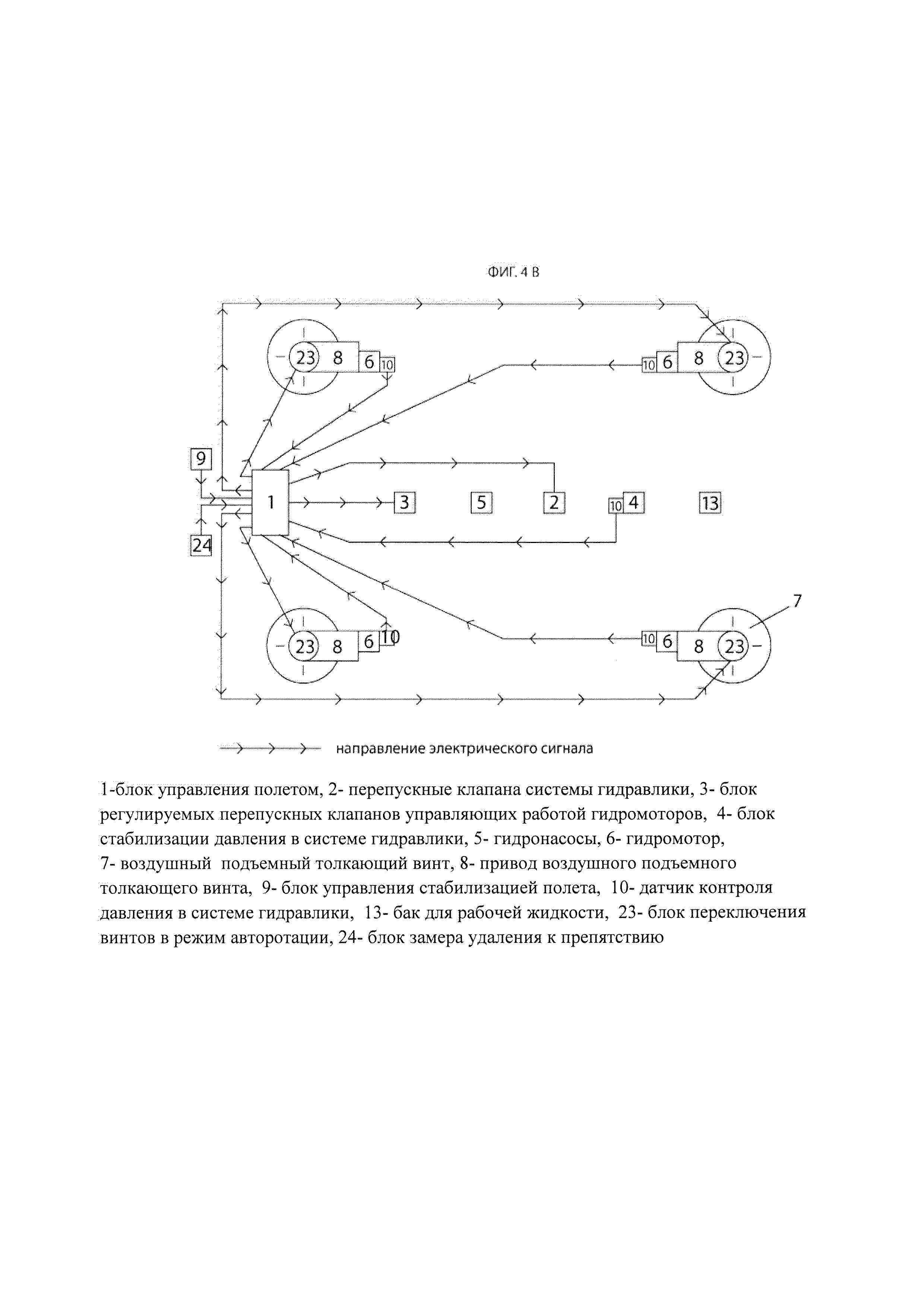
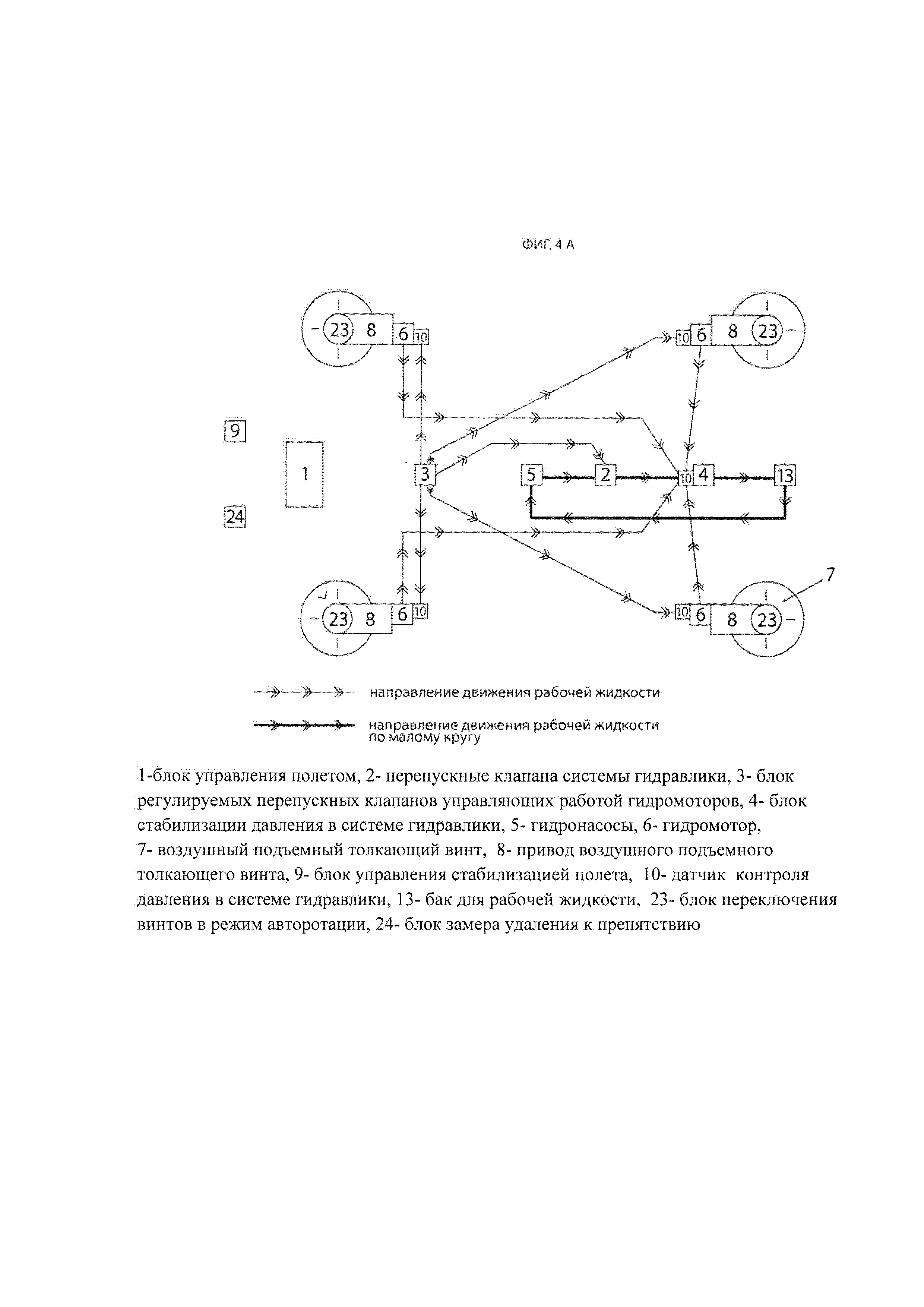
Наши летательные аппараты спроектированы так что, при своевременном техническом обслуживании, отказ силовой установки невозможен. Теоретически отказ привода винтов может произойти из-за остановки двигателя или утечки рабочей жидкости, что возможно только в результате халатного отношения к эксплуатации. Тем не менее в наших летательных аппаратах установлена система безопасности полета на случай экстренных ситуаций. Рассмотрим порядок ее работы. В схеме только два звена в которых возможна утечка рабочей жидкости, это канал высокого давления подачи рабочей жидкости от блока регулируемых перепускных клапанов управления работой гидромоторов (фиг.4А поз.3) к гидромотору (фиг.4А поз.6) и канал возврата рабочей жидкости от гидромотора (фиг.4А поз.6) к блоку стабилизации давления в системе гидравлики (фиг.4А поз.4). На каналах перед гидромоторами (фиг.4А поз.6) и блоком стабилизации давления в системе гидравлики (фиг.4А поз.4) установлены датчики контроля давления в системе гидравлики (фиг.4А поз.10). Каждый из них рассчитан на определенное давление. В случае уменьшения давления датчик контроля давления в системе гидравлики (фиг.4В поз.10) подает сигнал на блок управления полетом (фиг.4В поз.1). В этом случае блок управления полетом (фиг.4В поз.1) переводит перепускной клапан системы гидравлики (фиг.4В поз.2), отвечающий за аварийный участок, в рабочее положение. В результате рабочая жидкость идет по малому кругу: с бака для рабочей жидкости (фиг.4А поз.13) на гидронасос (фиг.4А поз.5), с гидронасоса (фиг.4А поз.5) через перепускной клапан системы гидравлики (фиг.4А поз.2) и блок стабилизации давления в системе гидравлики (фиг.4А поз.4) пойдет обратно в бак для рабочей жидкости (фиг.4А поз.13). Одновременно блок управления полетом (фиг.4 В поз.1) подаст сигнал на блок переключения воздушного подъемного толкающего винта в режим авторотации (фиг.4В поз.23), который расположен на отключенном воздушном подъемном толкающем винте винте (фиг.4В поз7), этот блок переведет отключенный воздушный подъемный толкающий винт (фиг.4В поз.7) в режим авторотации. Отключение одного воздушного подъемного толкающего винта (фиг.4В поз.7) не повлияет на работу летательного аппарата в целом. В случае отказа двигателя блок управления полетом (фиг.4В поз.1) подаст команду на все блоки переключения воздушных подъемных толкающих винтов в режим авторотации (фиг.4В поз.23), которые переключат все воздушные подъемные толкающие винты (фиг.4В поз.7) в режим авторотации. В случае неудачного повторного запуска двигателя система оставит воздушные подъемные толкающие винты (фиг.4В поз.7) в режиме авторотации, и летательный аппарат плавно опустится на землю. В случае опускания летательного аппарата со скоростью опасной для жизни пилота, сигнал с блока замера удаления к препятствию (фиг.4В поз.24) поступит на блок управления полетом (фиг.4В поз.1), который в автоматическом режиме откроет парашюты расположенные в летательном аппарате. На высоте не менее ста метров от поверхности приземления, с блока замера удаления к препятствию (фиг.4В поз.24) поступит сигнал на блок управления полетом (фиг.4В поз.1), блок управления полетом (фиг.4В поз.1) наполнит воздушную подушку, установленную по периметру под летательным аппаратом, воздухом. Конструкция привода воздушных подъемных толкающих винтов (фиг.4В поз.8) обеспечит работу воздушных подъемных толкающих винтов (фиг.4В поз.7) в режиме авторотации.
На летательных аппаратах будет установлен блок управления стабилизацией полета (фиг.4В поз.9) в автоматическом режиме. Блок управления стабилизацией полета (фиг.4В поз.9) предназначен для выравнивания горизонтальной оси аппарата относительно горизонта во всех направлениях. Этот блок работает в автоматическом режиме, но система приоритетно будет выполнять команды управления поданные пилотом. Для стабилизации полета в режиме автомата, пилоту необходимо прекратить управлять аппаратом. В этом случае блок управления полетом (фиг.4В поз.1) переведет аппарат в режим зависания и стабилизирует положение аппарата относительно горизонта.
Принцип работы аппарата в автоматическом режиме следующий. Блок управления стабилизацией полета (фиг.4В поз.9) сконструирован так, что он реагирует на малейший крен летательного аппарата и стремится к самовыравниванию относительно горизонта во все четыре стороны. При этом он автоматически подает электрический сигнал на ту сторону своего корпуса где существует крен. Этот сигнал передается на блок управления полетом (фиг.4В поз.1). Блок управления полетом (фиг.4В поз.1) в автоматическом режиме подает сигнал на перепускные клапана блока регулируемых перепускных клапанов управляющих работой гидромоторов (фиг.4В поз.3) которые отвечают за работу тех гидромоторов (фиг.4В поз.6) которые находятся ниже оси горизонта.
В результате увеличивается подача рабочей жидкости на эти гидромоторы (фиг.4А поз.6), а следовательно и обороты этих гидромоторов (фиг.4 поз.6), в результате увеличиваются обороты воздушных подъемных толкающих винтов (фиг.4А поз.7), которые приводятся в движение этими гидромоторами (фиг.4А поз.6). Аппарат выравнивается относительно горизонта. После выравнивания аппарата относительно горизонта блок управления стабилизацией полета (фиг.4В поз.9) возвращается в нулевое положение, и прекращает подачу электрического сигнала на блок управления полетом (фиг.4В поз.1).
Во время движения блок управления полетом (фиг.4В поз.1) будет в автоматическом режиме высчитывать безопасное удаление до препятствия с учетом скорости полета. При приближении к препятствию на расстояние меньше безопасного, блок управления полетом (фиг.4В поз.1), независимо от действий пилота, подаст команду на изменение курса, либо снизит скорость до минимально допустимой в случае необходимости приземления или приближения к препятствию. Для контроля за расстоянием до объекта на летательном аппарате установлен блок замера удаления к препятствию (фиг.4В поз.24). Система управления полетом будет работать следующим образом. На протяжении всего полета блок замера удаления к препятствию (фиг.4В поз.24) будет посылать сигнал во все стороны от летательного аппарата. После получения отраженного сигнала от препятствия блок замера удаления к препятствию (фиг.4В поз.24) будет подавать команду на блок управления полетом (фиг.4В поз.1) который в автоматическом режиме будет сопоставлять скорость летательного аппарата и удаление до препятствия. В случае необходимости продолжения полета в выбранном направлении блок управления полетом (фиг.4В поз.1) подаст команду на облет препятствия. Для этого блок управления полетом (фиг.4В поз.1) в автоматическом режиме изменит скорость вращения воздушных подъемных толкающих винтов (фиг.4В поз.7) необходимых для совершения маневра по облету препятствия. В случае необходимости приближения к препятствию блок управления полетом (фиг.4В поз.1) будет в автоматическом режиме уменьшать скорость движения летательного аппарата, по мере приближения к препятствию, до полной его остановки после стыковки с препятствием.
Порядок работы системы управления полетом, при изменении направления движения и подлету к препятствию, такой же, как во время взлета, при изменении направления движения вперед-назад, вправо-влево и остановке летательного аппарата.
Система управления полетом летательного аппарата, состоящая из системы управления взлетом и посадкой, системы управления движения влево-вправо, вперед-назад, остановки и парковочного хода, системы безопасности летательного аппарата, отличающаяся тем, что для управления работой узлов и агрегатов, задействованных во время полета, используется электрогидромеханическая система, в которой изменение режимов работы узлов и агрегатов, управляющих полетом, происходит за счет изменения давления рабочей жидкости в электрогидромеханической системе, состоящей из гидронасосов, блока управления полетом, гидромоторов, блока управления работой гидросистемы, перепускных клапанов системы гидравлики, электромеханического гидрораспределителя, управляющего переключением передач подъемных гидромеханических коробок передач, блока регулируемых перепускных клапанов, управляющих работой гидромоторов и блока стабилизации давления, при этом передача крутящего момента от источника к воздушным винтам обеспечивается через гидравлику.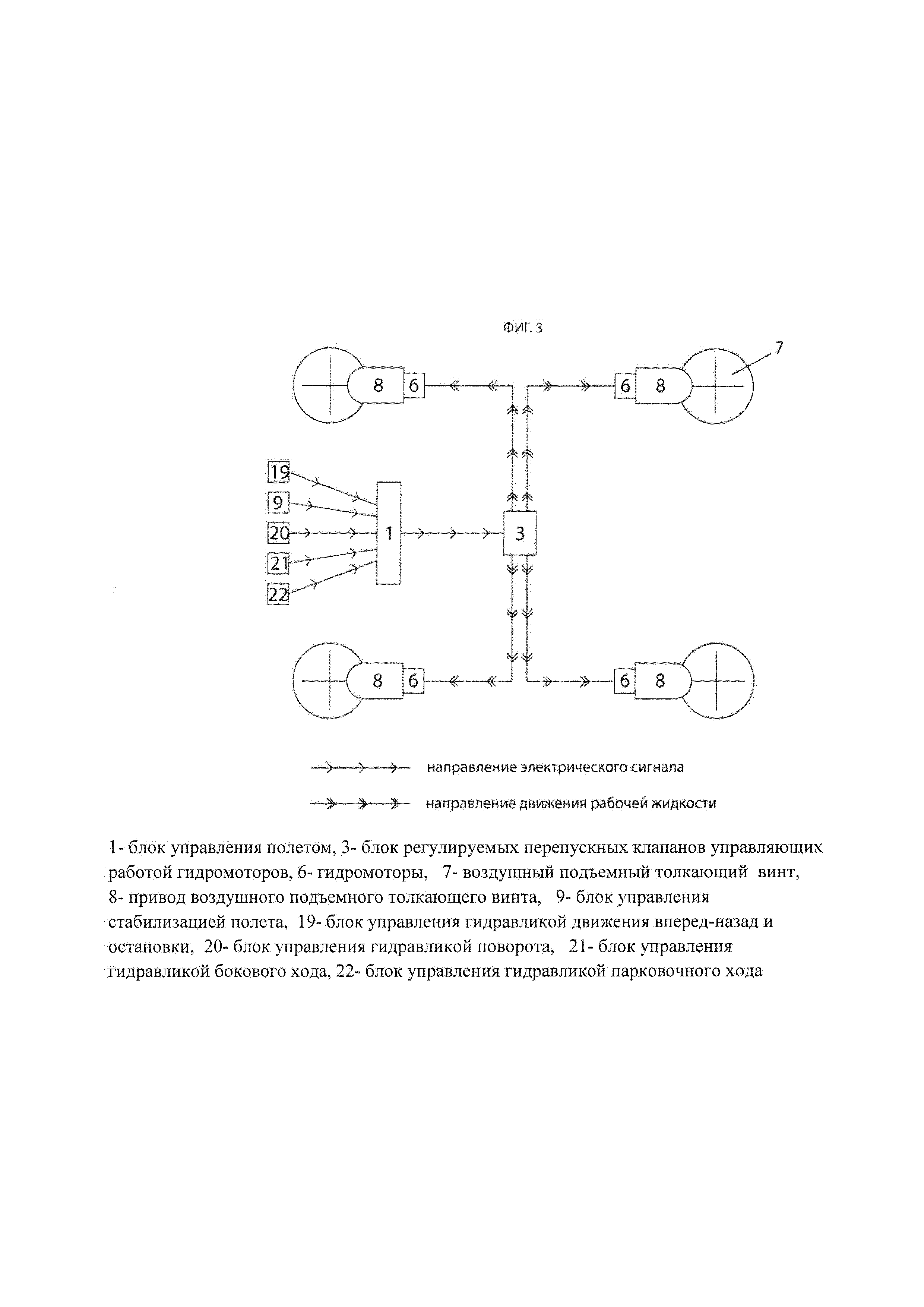
Гидромеханическая коробка передач
Летательный аппарат
Летательный аппарат
Коробка отбора мощности
Блок регулируемых перепускных клапанов
Гидромеханическая коробка передач
Летательный аппарат
Летательный аппарат
Коробка отбора мощности
Блок регулируемых перепускных клапанов

